
USING MOBILE DEVICES FOR TOPOLOGICAL INFERENCE
OF INDOOR ENVIRONMENTS
Marco Paiva
1
, Marcelo Petry
1,2
and Rosaldo J. F. Rossetti
1
1
Artificial Intellegence and Computer Science Laboratory, Department of Informatics Engineering,
Faculty of Engineering, Univeristy of Porto, Rua Dr. Roberto Frias, S/N, 4200-465 Porto, Portugal
2
INESC Porto, Institute for Systems and Computer Engineering of Porto,
Faculty of Engineering, Univeristy of Porto, Rua Dr. Roberto Frias, S/N, 4200-465 Porto, Portugal
Keywords: Indoor Localization, Local Positioning Systems, Topology Mapping.
Abstract: Nowadays location systems are used within a large variety of applications. The application of these systems
within indoor environments is already provided by several solutions. However, the need for high accuracy
within these environments to pursue such purpose implies the use of specific infrastructures designed
towards it. Our project tries to meet the requirements for a simple, low-cost, and scalable location system
through different approaches. The main idea of it is to re-construct topological maps of indoor spaces
through location estimation, i.e. using off-the-shelf technologies. We try to perform location estimations and
then re-create the indoor maps as topological maps as a means of reducing the precision requirements other
systems have, and develop a scalable and highly applicable system using sensors featuring mobile devices.
1 INTRODUCTION
Location-aware services have become an important
area for today’s ubiquitous and pervasive computing
applications. The increasing use of such services
brought the need to implement them in mobile
platforms. Thus, location estimation systems that
can provide those services in indoor environments
have become subject of several studies and
developments.
Today’s solutions provide location-aware
services in applications that are oriented towards
localization in maps that give a metric perception of
environments; thus, maps resemble their real
environment. However, we believe that this metric-
oriented approach is not the optimum approach for a
scalable implementation of indoor location-aware
services used in mobile devices. In this sense,
topological mapping approaches bring an abstraction
to that metric information and are more likely to deal
with low accurate measurements. In addition, they
could be implemented with techniques that use less
a priori information and in systems with limited
computational power. This might be a good
approach to improve scalability in such systems.
These two approaches are well studied in
robotics and their development has been made based
on the SLAM (simultaneous localization and
mapping) methodology, for instance. While metric
maps try to precisely represent the world by
measuring and relating distances, as it is proposed in
(Yiguang et al., 2010), the main idea behind the
topological approach is to provide distinctiveness for
global localization and mapping within the
environment as it is done in (Beeson et al., 2005) or
in (Sogo et al., 2001). More specifically, topological
maps provide a sketch map with labelled places and
abstract paths between them, in contrast to the
metric maps that try to sketch all the features within
the environment with geometric precision. A
topological map approach can be used also in
location-aware services oriented towards human
utilization. For instance, humans would not require
geometric locations to navigate in indoor
environments and could easily do it through
semantic locations and connections between them.
The same idea can be applied to many intelligent
systems which make use of location-aware services.
Our premise is to depart from a system with very
little information about the environment. No map
and topology is known a priori. Thus, its goal must
be to achieve localization in the indoor environment
and through that localization start building a
topological map of the environment along the time
and through a collaborative fashion among users.
427
Paiva M., Petry M. and J. F. Rossetti R..
USING MOBILE DEVICES FOR TOPOLOGICAL INFERENCE OF INDOOR ENVIRONMENTS.
DOI: 10.5220/0003835304270432
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 427-432
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

In order to materialize this idea, we have to
emphasize the available sensor technologies that can
be used to perform localization in indoor
environments. The first technology that comes to
mind when thinking about localization is GPS
(Global Positioning Systems). However, this
technology has a poor performance in indoor
environments due to the lack of satellite coverage.
Some works have been made also with cellular
networks, namely using GSM (Global System for
Mobile Communication), but it suffers from the
same effects as referred to GPS. Nevertheless, better
performances can be achieved through the use of a
priori data about the environment, situation which
we intend to minimize in our research.
One of the most explored technologies to
perform localization in indoor environments is Wi-
Fi Wireless LAN. This is a technology widely
implemented in public infrastructures and that is also
built-in in today’s ordinary mobile devices.
However, this kind of technology suffers from
significant signal attenuation effects in indoor
environments, such as: multipath; refractions;
reflections; scattering and shadowing. These
problems are normally overcome through
fingerprinting approaches, as in GPS or in GSM.
However, several techniques can be performed
without fingerprinting methods and using Wi-Fi
WLANs. These methods rely on simple lateration or
angulation techniques or even doing an on-line
calibration phase similar to fingerprinting.
Another technology that can be used for
localization purposes and that is widely spread in
mobile devices is Bluetooth. Despite similar to Wi-
Fi in some aspects, Bluetooth measurements are
only able after establishing a connection between
devices. This is usually overcome through learning
algorithms, such as Artificial Neural Networks to
estimate device positions. Another approach relies
on using other sensor technologies that are also
highly available on today’s mobile devices, such as
accelerometers, magnetometers and gyroscopes.
Such an approach usually performs dead-reckoning
of devices when the users are on the move through
acceleration and orientation measures.
We are specifically interested in studying the
potential of available technology to support easy and
practical inference of topological maps for indoor
applications. We want to provide some guidelines to
select mobile-enabled sensors to base topological
map inference methods, and build such maps
through localization of devices in indoor
environments in a collaborative fashion. With the
localization estimates of many devices we expect to
achieve a better basis for performing topological
map inference methods.
Firstly, we analyse the best techniques and
technologies to perform localization with mobile
devices, which can provide us with a better basis for
topological map inference through simple, low-cost
and common infrastructures. Secondly, we show
how such a system is implemented in those devices
and make an analysis of the preliminary
implementation and results using multiple devices.
2 RELATED WORK
Several works have been developed in order to
achieve localization of mobile devices in indoor
environments. Topological map inference has been
made mainly in the robotics field, focusing on the
SLAM methodology, as we mentioned before.
Nevertheless, we must first focus on localization
issues for mobile devices.
2.1 Solutions for Localization
Applications
Several GPS-based systems and approaches have
been proposed for localization purposes. SnapTrack
(Biacs, 1999), uses A-GPS and achieves accuracies
between 5-50m. However, GPS is not the ideal
technology to use in such a purpose due to its poor
performance in this kind of environments. With
GSM based systems, (Otsason et al., 2005)
presented a solution that led to an accuracy as low as
2.5m. The main idea of it was to use wide signal-
strength-fingerprints in a training phase, what
implies several a priori configurations within the
environment. This is a down point regarding the idea
of using as less a priori configurations as possible to
perform localization with a specific system, as we
intend to do.
Lots of Wi-Fi-based solutions have been also
developed and we give emphasis to two of them.
The RADAR solution proposed in (Bahl and
Padmanabhan, 2000), which is one of the most cited
systems in related literature, provides localization
through two main ways. One work is in a basic
fingerprinting approach where several off-line
measurements are made in a prior training phase,
whereas the other is based on a signal propagation
model. The approaches use the k-nearest neighbour
algorithm to achieve positioning estimations. The
number of neighbours, the number of off-line
measured points, user orientations, and the number
of samples achieved in the real-time measurement
ICAART 2012 - International Conference on Agents and Artificial Intelligence
428

phase affect the accuracy of the system. They are
reported to achieve accuracy around 2-3m. Another
work (Ekahau, 2010) is one of the most accurate
systems that use the Wi-Fi sensor technology. It uses
a Bayesian approach combined with stochastic
complexity and a competitive online learning
algorithm. Although it achieves accuracy as high as
1m, it is achieved through a training phase that
implies a strict calibration that has to be performed
in a very complex and precise way.
We also found Bluetooth solutions in our
literature review. The one presented in (Tadlys,
2010) reported an accuracy of about 2m, with 95%
reliability with a positioning delay between 15-
30sec. The solution relies on wireless tags and
wireless access points. The use of inertial sensors as
referred in the Introduction finds also some
developed solutions in literature. They are mainly
done through a pedestrian tracking approach using a
proper algorithm to estimate the device’s orientation
and in a next phase they take samples of the
accelerometer sensor to acquire the mobility of the
device. In (Yiguang et al., 2010), estimation is made
according to a walking pattern that provides a
realistic representation of movements of a human
carrying the device. Reported results have shown a
better trend with an increase of devices being
tracked and given errors between 2-3m on the floor
map estimation, not considering angle errors.
2.2 Localization Techniques
The main techniques used on systems that perform
localization estimation in indoor environments
nowadays are identified in the next sub-section.
2.2.1 Lateration and Angulation Methods
Lateration is a technique that can provide a position
estimate of a mobile device through at least three
measures for the two dimensional case. Essentially it
is the conjunction of three distances between
transmitters and one receiver that can provide the
position through lateration. Given those distances, it
is possible to know that the receiver is within three
circumferences, on which their radius are the
distances computed between transmitters and
receiver. The localization of the receiver can be then
achieved through the Euclidean distance. The best
case scenario of this technique is when the three
circumferences intercept themselves at one point. In
this case the estimated receiver position would be
that point. However, it is possible that the
circumferences do not intercept at a single point,
being the estimation through this technique not
precise or even impossible to define. This is
basically due to error estimations on the distance
between reference points and the device, which
exists due to the use of propagation models that
cannot optimally describe the environment
characteristics. To overcome this problem least-
squares algorithm is usually applied to achieve a
better estimation of the receiver position.
On the other hand, angulation takes advantage
of the “angles” of the received signal on
transmitters. Basically, angulation only requires to
get two reference-point transmitters and measuring
their AoA (angle of arrival). With those values it is
possible to sketch a triangle and then obtain the
position of the device (Hui et al., 2007).
2.2.2 Scene Analysis
Scene analysis makes use of a predefined data set
that maps observed features into object locations.
One example of static scene analysis is the RADAR
system, presented in (Bahl and Padmanabhan, 2000).
This technique is considered one of the best
alternatives to simple triangulation or lateration
methods made without a priori fingerprinting. In
theory, the static scene analysis can be performed
with all the measurements or features available. But
for indoor localization purposes, the most common
metric used is RSSI (received signal strength
indicator). Other metrics can also be achieved and
used, for example AoA (angle of arrival) or ToA
(time of Arrival), or even the use of image analysis
for navigation, which can be done also through
mobile platforms with built-in cameras.
Scene analysis is usually performed in two
phases: one training phase that is usually made off-
line, and where normally a database is built
containing pattern variations of one or more features
in known locations; and, another phase when the
location estimation is done through a relationship
analysis with data originated in the first phase.
Deterministic and Probabilistic models are normally
used to perform the matching in the second phase.
The main advantages of scene analysis concern
the fact that location of “objects” can be inferred
using passive observations. However, this kind of
method requires previous analysis of scenes, so that
a comparison can be performed to achieve location.
2.2.3 Using Neural Networks
Artificial Neural Networks (ANN) is another
approach to yield indoor localization, as it is done in
(Ahmad et al., 2006). The basic concept is to use
USING MOBILE DEVICES FOR TOPOLOGICAL INFERENCE OF INDOOR ENVIRONMENTS
429
ANN to produce a non-linear input-output mapping.
It is used in several applications, such as
classification, approximation or regularization. This
kind of approach is similar to scene analysis but,
instead of using probabilistic methods, it uses ANN
to compute the matching between the fingerprints
and the real time observations. The key advantage of
using ANN is that it has a lower cost in terms of
time and space necessary to process measurement
acquisitions. However, as this kind of approach
mostly relies on learning algorithms, it can induce to
some erroneous estimation. ANN is also well suited
for different complex and dynamic indoor
environment estimations.
3 A PRELIMINARY
ASSESSMENT
To implement a system that could be applied on
scalable basis, which would not require as much a
priori setups, one that could be provided through
ordinary mobile devices and within common
infrastructures, we opted to develop a solution using
three main sensor technologies: Wi-Fi sensors
within WLAN, performing a lateration technique
with a minimum squares optimization procedure,
accelerometers and magnetometers to perform dead
reckoning with the mobile devices through a
pedometer and a compass emulation.
The Wi-Fi sensors and the performed lateration
technique was chosen due to the high availability
that this kind of sensors have in existing
infrastructures and also due to the low complexity
characteristic of the lateration technique that does
not require much setup data to be performed.
Nevertheless, we need to remark the low accuracy in
localization estimation that this technique has.
However, our goal was not to achieve the most
accurate estimation but to be able to construct
topological maps which do not require precise
metric information about the environment.
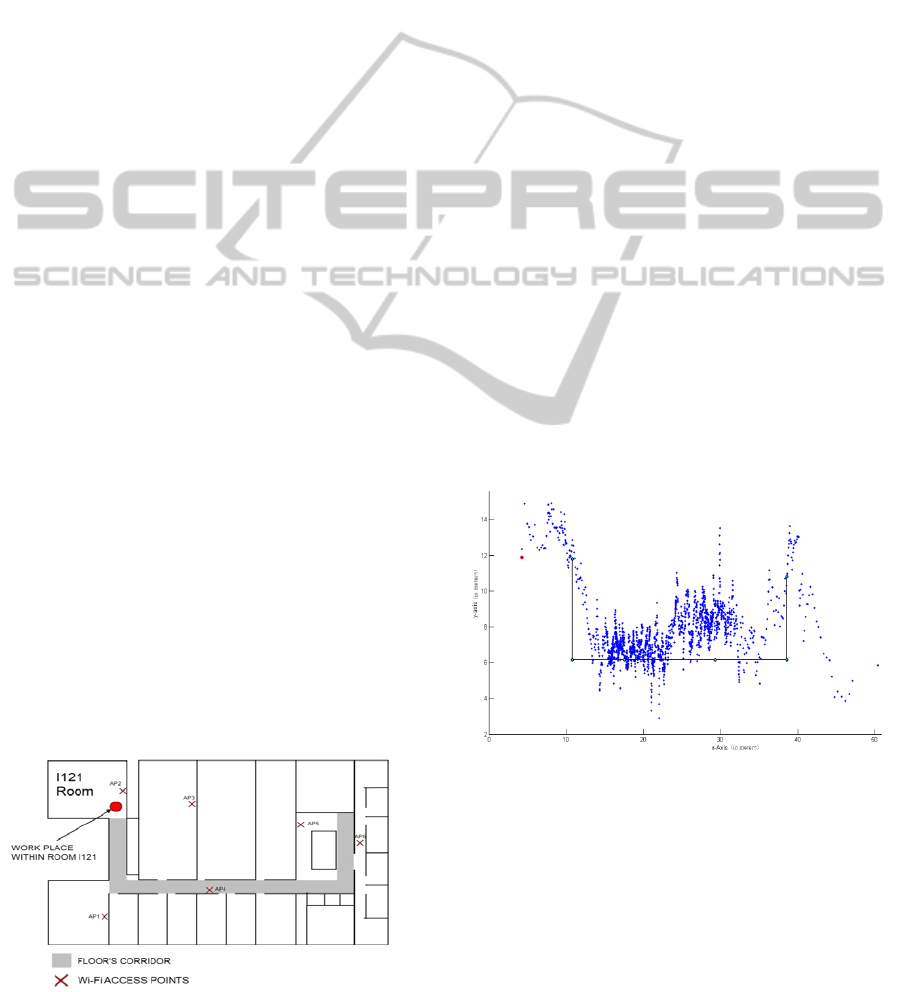
Figure 1: Floor plan where the experiments were made.
We chose the accelerometers and magnetometers
to perform dead-reckoning also due to their high
availability in today’s mobile devices. To perform
the dead-reckoning we make use of the pedometer
emulator to count steps, and compute the orientation
of each step through the fusion of an accelerometer
and a magnetometer from where we are able to
emulate a compass.
In order to implement the system we developed
an application under the Android OS to be used on
mobile phones, and which had the task to collect
data from all those sensors. Then we performed the
localization estimations outside the application and
through that collected data. We must remark that we
perform estimations outside the mobile devices
because our idea is to provide a collaborative
solution among users in order to accomplish a more
reliable map reconstruction.
3.1 Wi-Fi Lateration Results
3.1.1 Path Tracking Estimations of Moving
Devices
In this experiment we performed several estimations
of five different devices within a corridor path in the
floor presented in Figure 1. The results of all merged
estimations achieved accuracies as low as 1.4m to
the real corridor path. However, these results
presented a maximum deviation of 7.37m in some of
the estimations.
Figure 2: Localization estimations made along a walking
path with Wi-Fi, after applying a Kalman filter.
Figure 2 presents merged estimations along that
path; blue dots are estimations achieved after a
Kalman Filter procedure applied over raw
estimations, and the line in black represents the real
path, where the mobile devices moved.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
430
3.1.2 Dead-Reckoning Estimation Made
within a Path
In this experiment we carried out dead-reckoning
within the same path illustrated in Figure 1. As the
orientation estimations made had too much magnetic
influence from the environment, we filtered the
measurements through a median filter and clustered
the orientations to a minimum orientation change of
90º, as all the corridors within the environment can
be modelled like that.
The results presented an improvement of the
accuracy in comparison to the estimations made with
the Wi-Fi lateration, as low as 1.05m with a
maximum error deviation of 3.0m.
In Figure 3, we illustrate one of the results
achieved with one mobile device where the line in
black is the walking path and the blue dots are the
estimations made with dead-reckoning.
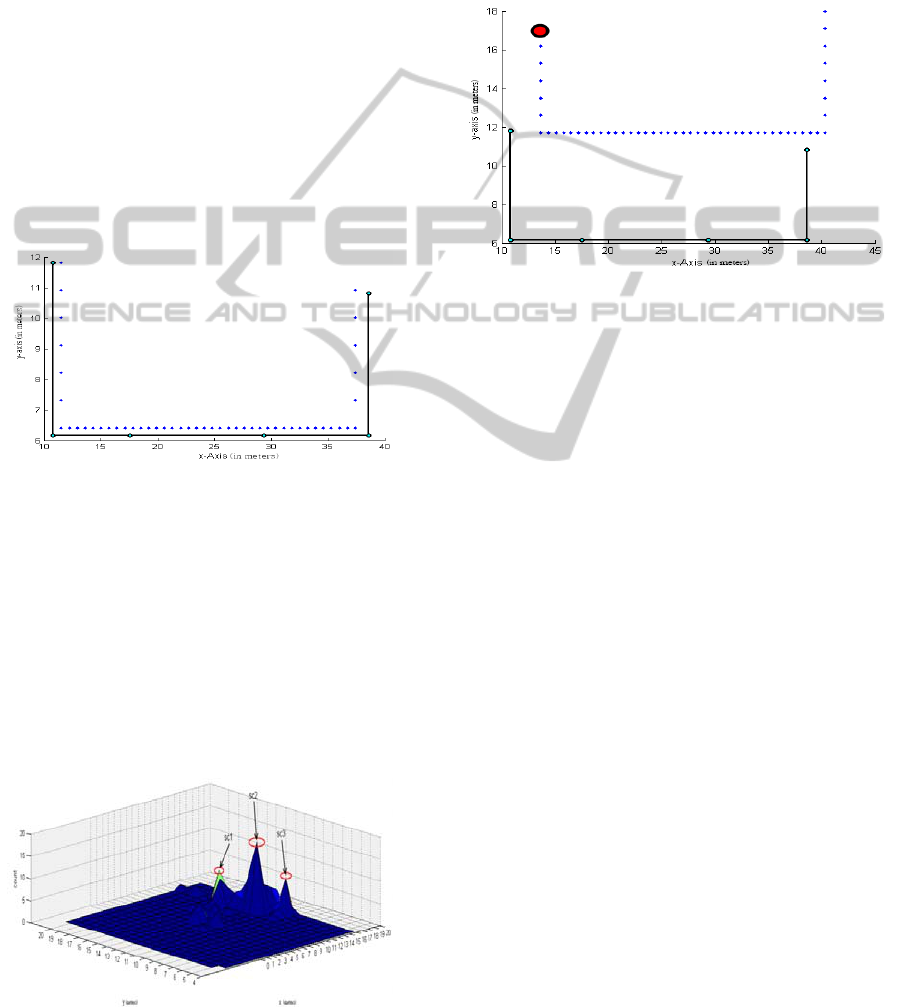
Figure 3: Estimation of the walking path through dead-
reckoning.
3.1.2 Inference of a Corridor Topology and a
Room Space
This was the inference experiment that we made
using the previously described results. Its main goal
was to infer a single room as a starting point and the
corridor that connects to that room. To do it we used
a histogram of the estimations made with the Wi-Fi
sensor and which were gathered in the I121 room,
which is illustrated in Figure 4.
Figure 4: Wi-Fi lateration estimations histogram,
performed in room I121.
With that histogram we computed a single
position which corresponds to the centre of mass
between the 3 positions with more estimations along
the time (sc1, sc2, sc3) as it is depicted in Figure 4.
Thus, we inferred it as the working place within the
room; we used the dead reckoning estimations,
starting at that single position and performed along
the corridor topology.
Figure 5: Inference of a room connected to the corridor
topology.
With those estimations we inferred the corridor
topology and gathered the working place within
room I121. When fusing the two inferences, we
were able to achieve the inference of the room
connected to the corridor as it is shown in Figure 5,
where blue dots are the dead-reckoning estimations
and the red circle is the working place estimated
with the histogram. However, the sketched topology
is deviated from the real one due to the error of the
estimation made with the Wi-Fi at the position in the
room. Despite this deviation, the topology is similar
to the real one and we can conclude that it is a good
inference made within the topology map purpose we
pursue in our research.
This method can be applied to several semantic
locations and extended into different environments,
as they can be inferred based on the time users spend
in different spots.
4 CONCLUSIONS
In order to accomplish the goals of this work we
developed a system using sensor technologies
featured on the most common mobile devices: Wi-Fi
sensors, accelerometers and magnetometers. With
the application we developed we were able to gather
important data to perform localization within indoor
environments. We should first remark the low
accuracy that we achieved with the Wi-Fi lateration
USING MOBILE DEVICES FOR TOPOLOGICAL INFERENCE OF INDOOR ENVIRONMENTS
431

estimations, which at a first glance can lead us to
thinking in the unfeasibility of such a purpose using
this technique. However, when looking into the
overall results gathered with the Wi-Fi lateration and
the dead-reckoning made with the accelerometer and
the magnetometer, the achieved results led us to
conclude the feasibility of creating an indoor
environment topological map with those localization
estimations over the time they are gathered. In this
sense we were able to make a simple inference
where we achieved a topological map of a room
connected to a corridor which was very realistic and
which reinforces it is possible to accomplish our
purpose.
As next steps or further developments that can be
taken after this work, we might suggest the
improvement that can be made in order to achieve
even more localization estimations, which can be
made for instance by adding more sensor
technologies to the system, such as Bluetooth.
Another kind of improvement can be made in the
scope of optimizing the inference methods. This can
be achieved, for example, by using regression
models or clustering techniques to estimate the
topology of the indoor environment using all the
estimations gathered with all the sensors at the same
time.
As future applications of our work we should
state that it leads to the suggestion of several future
studies within the area of local positioning systems.
Navigation applications, such as the ones used
nowadays within outdoor environments but applied
to indoor spaces are one of the ways of exploring the
developments of this project. Integration with
autonomous driving systems or other applications in
the robotics field of research is another possibility.
Integration with applications used for indoor
commercial purposes, as a way to provide better
efficiency and easier functionalities when consumers
search for products within indoor areas is also
considered. Using such a system in rescue situations,
as a way to know in advance the topology of the
rescue environment represents a very promising
field of application as well. Location-based social
games are another area of great potential for this
work. Generally all applications that make use of
indoor topology maps can benefit from a system that
provides, through inference, indoor topology maps.
REFERENCES
Ahmad, U., Gavrilov, A., Nasir, U., Iqbal, M., Seong Jin,
C. & Sungyoung, L. (2006). In-building Localization
using Neural Networks. In: IEEE International
Conference on Engineering of Intelligent Systems,
2006. p.1-6.
Bahl, P. & Padmanabhan, V. N. (2000). RADAR: an in-
building RF-based user location and tracking system.
In: Proceedings of the 19th Annual Joint Conference
of the IEEE Computer and Communications Societies
(INFOCOM). vol.2, p.775-784.
Beeson, P., Jong, N. K. & Kuipers, B. (2005). Towards
Autonomous Topological Place Detection Using the
Extended Voronoi Graph. In: Proceedings of the 2005
IEEE International Conference on Robotics and
Automation (ICRA). p.4373-4379.
Ekahau (2010). Ekahau, Wi-Fi Based Real-time Tracking
and Site Survey Solutions? [Online]. Available: www.
ekahau.com [Accessed on 26/Feb./2011].
Hui, L., Darabi, H., Banerjee, P. & Jing, L. (2007). Survey
of Wireless Indoor Positioning Techniques and
Systems. IEEE Transactions on Systems, Man, and
Cybernetics, Part C: Applications and Reviews. (37):
1067-1080.
Otsason, V., Varshavsky, A., Lamarca, A. & De Lara, E.
(2005). Accurate GSM Indoor Localization. In: Beigl,
M., Intille, S., Rekimoto, J. & Tokuda, H. (eds.)
UbiComp 2005: Ubiquitous Computing. Springer.
Sogo, T., Ishiguro, H. & Ishida, T. (2001). Acquisition and
propagation of spatial constraints based on qualitative
information. IEEE Transactions on Pattern Analysis
and Machine Intelligence. (23):268-278.
Tadlys (2010). Topaz local positioning solution [Online].
Available: www.tadlys.com [Accessed on 25/Feb./
2011].
Yiguang, X., Sengupta, R. & Fallah, Y. (2010). Making
indoor maps with portable accelerometer and
magnetometer. In: Ubiquitous Positioning Indoor
Navigation and Location Based Service (UPINLBS).
p.1-7.
Biacs, Z., Marshall, G., Moeglein, M., Riley. W. (1999).
The Qualcomm/ SnapTrack Wireless-Assisted GPS
Hybrid Positioning System and Results from Initial
Commercial Deployments. In: Proceedings of the 55th
ION Annual Meeting, Navigational Technology for the
21st Century.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
432
