
CONTOURLET BASED MULTI-EXPOSURE IMAGE FUSION
WITH COMPENSATION FOR MULTI-DIMENSIONAL
CAMERA SHAKE
S. Saravi and E. A. Edirisinghe
Digital Imaging Group, Loughborough University, Loughborough, U. K.
Keywords: Image Registration, Multi-exposure Image Fusion, Translational and Rotational Camera Shake, Wavelet
Based Contourlet Transform, CPD, SIFT, RANSAC.
Abstract: Multi-exposure image fusion algorithms are used for enhancing the perceptual quality of an image captured
by sensors of limited dynamic range by rendering multiple images captured at different exposure settings.
One practical problem overlooked by existing algorithms is the compensation required for image de-
registration due to possible multi-dimensional camera shake that results within the time gap of capturing the
multiple exposure images. In our approach RANdom SAmple Consensus (RANSAC) algorithm is used to
identify inliers of key-points identified by the Scale Invariant Feature Transform (SIFT) approach
subsequently to the use of Coherent Point Drift (CPD) algorithm to register the images based on the selected
set of key points. We provide experimental results on set of images with multi-dimensional (translational
and rotational) to prove the proposed algorithm’s capability to register and fuse multiple exposure images
taken in the presence of camera shake providing subjectively enhanced output images.
1 INTRODUCTION
In the past decade there have been significant
developments in the field of High Dynamic Range
(HDR) imaging technology. However, the lack of
advances in image/video encoding algorithms and
display technology makes it important to find
alternatives to rendering HDR scenes using SDR
imagery. Multi-exposure image fusion involves the
fusion of multiple consecutive images of the same
scene taken at quick succession by a SDR camera. A
practical problem that arises is camera shake that
can cause severe de-registration of the multiple
images that invalidates the direct applicability of
many existing algorithms. To this effect we propose
the use of an image registration algorithm as a pre-
processing stage to multi-exposure image fusion.
A significant number of multi-exposure image
fusion algorithms have been proposed in the relevant
literature (Zafar, Edirisinghe, and Bez 2006 –
Alsam, 2010). However, only few algorithms focus
on the problem of camera shake (Tomaszewska and
Mantiuk, 2007 – Lee and Wey 2009).
Image fusion can take place on pixel-level,
feature-level, and decision level. In the literature,
image fusion has been based on pyramidal fusion,
contourlet fusion and wavelet fusion. The wavelet
transform (WT) results are acceptable in natural
images, but smooth edges cannot be detected
powerfully because it is restricted to three directions,
horizontal, vertical and diagonal. Contourlet
transform (CT) is a two dimensional transform
which has the capability to effectively represent
images containing curves and features. In CT, multi-
scale and multi-direction analyses are done
separately, using the Laplacian Pyramid (LP)
transform and then the Directional Filter Bank
(DFB). This method is redundant. WBCT (Eslami
and Radha, 2005) is a solution for above weakness
which is non-redundant and has a multi-resolution
structure. The advantage of using WBCT is that it
solves the problems of multi-scale localization,
directionality and anisotropy.
2 PROPOSED SYSTEM
The proposed system consists of two key parts, first
part uses a base image of a multi exposure image set
to register all remaining images and second part
fuses the registered, multi-exposure image set.
182
Saravi S. and A. Edirisinghe E..
CONTOURLET BASED MULTI-EXPOSURE IMAGE FUSION WITH COMPENSATION FOR MULTI-DIMENSIONAL CAMERA SHAKE.
DOI: 10.5220/0003836001820185
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 182-185
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2.1 Image-Registration
The proposed approach is based on the selection of a
significant set of matching points, i.e. key-points,
between a selected base image and an image to be
registered and subsequently using them to calculate
the transformation matrix for image registration.
2.1.1 SIFT based Key-point Selection
SIFT (Lowe, 2004) is an algorithm that is capable of
detecting and describing local features of an image.
It’s invariance to rotation, scale and translation has
made it a popular algorithm in many areas of
computer vision. It is also invariant to illumination
changes and robust to local geometric distortion.
In the proposed approach to image registration we
select a base image from amongst the set of multi-
exposure images and an image to be registered to it
and use SIFT to find significant key-points in both
images. Due to large number of feature points that
may be selected by SIFT in execution the matching
of key-points between two images to be registered; it
is likely that two non-corresponding points may
match as they result in the minimum distance.
Therefore reducing keypoint outliers prior to the
matching key-points will improve the reliability of
matching and hence the outcome of the final task.
2.1.2 Using RANSAC to Remove Matching
Point Outliers
RANSAC (Fischler and Bolles, 1981) algorithm is
an iterative method to approximate factors of a
mathematical form, from a set of experimental data
which include outliers. RANSAC is able to do
robust estimations of the model factors; it can
estimate the parameters with a high degree of
accuracy even when a significant amount of outliers
are present in the data set.
In our approach all SIFT key-points points
resulting from the stage described in section 2.1.1
from the base image and the image being registered
are fed to RANSAC algorithm. It fits a model to
these inlier points and tests the points from the
image being registered against the fitted model, and
if a point fits to the model it will be regarded as
inlier. The model is recalculated from all inliers and
then the error is estimated relative to the model. The
outlier key-points are finally removed from the key-
points of the image.
2.1.3 CPD Algorithm for Registration
In this section we describe the use of the CPD
(Myronenko, 2010) algorithm to register the images,
accordingly preparing them to be fused in the
subsequent stage of the proposed approach. CPD is
based on ‘Point Set Registration’ and aims to form
links between two given sets of points to find the
corresponding features and the necessary
transformation of these features that will allow the
images to be registered.
There are two methods for registering an image
in CPD, rigid and non-rigid point set approaches,
based on the transformation model principal. The
key characteristic of a rigid transformation is
“distance between points are preserved”, which
means it just can be used in the presence of
translation, rotation, and scaling, but not under
scaling and skew. Affine, the transformation we
have used in our work is a non rigid transformation,
which provides the opportunity of registering under
non-uniform scaling and skew.
2.2 Multi-Exposure Image Fusion
Once all images are registered to the base image we
use WBCT to identify regions of maximum energy
from within the multiple exposure images, with the
idea of combining these to form the perceptually
best quality fused image.
2.2.1 Multi-exposure Image Fusion
The basic idea of the fusion algorithm is to compare
the corresponding sub-bands of the WBCT
decomposition of each multi-exposure image set and
to determine the one with the highest energy, i.e.
most detailed. We propose the use of different fusion
rules depending on the frequency band of each sub-
band being fused, as follows:
Fusion of High Frequency Contourlet Sub-bands
:
The high frequency sub-bands contain details of an
image such as texture and edges where as the low
frequency sub-bands contains details of more
spread-out nature or fuzzy, such as background
information. By calculating the absolute energy of
high-frequency coefficients, the energy of a region
can be obtained. A higher value means sharper
changes. Region energy E of a high frequency sub-
band E
H
(where H = (l,m,n), l-level of wavelet
decomposition, m-LH, HL and HH bands of wavelet
decomposition, n-directional Contourlet sub-band)
of an image X can be obtained as follows:
E
(
)
=
f
(
)
(
,
)
∈
(
x,
y
)
(1)
f
H
(x,y) is the coefficient at location (x,y) of the
CONTOURLET BASED MULTI-EXPOSURE IMAGE FUSION WITH COMPENSATION FOR
MULTI-DIMENSIONAL CAMERA SHAKE
183

high frequency sub-band H=(l,m,n).
Considering that the sub-band of the multi-
exposure image having highest detail will have the
highest absolute energy, the H sub-band that
contributes towards the fused image’s H sub-band
can be defined as:
f
(
)
(
i,j
)
=
f
H
(Y)
, E
H
(Y)
=max(E
H
(i)
) |
i=1,2,...n
(2)
Where n is the number of exposures considered.
Fusion of Low Frequency Contourlet Sub-bands
:
The Low frequency sub-bands contain the fuzzy,
spread-out information. Thus the fusion rule adopted
is based on the region variances. The idea is to
divide each low frequency sub-band to i×j
rectangular sub regions and calculate the variance of
each sub region which can be obtained as follows:
V
(
)
(
x,
y
)
=(
f
(
)
(
,
)
∈
(
×
)
(i,j)(x,
y
)−
f
(
)
(
i,j
)
)
(3)
is the mean of all the coefficients in the
rectangular sub region i×j. Higher result in
variance corresponds to more details. Fusion of the
low frequent sub-bands can be obtained from
equation below:
f
(
)
(
i,j
)
=
f
L
(Y)
, E
L
(Y)
=max(E
L
(i)
) |
i=1,2,...n
(4)
Where n is the number of exposures considered.
Fusion of Low Frequency Wavelet Sub-bands
:
The low-pass wavelet sub-band of fused image is
calculated by averaging the low pass wavelet sub-
bands of the multiple exposure images, as follows:
A
(
)
(
i,j
)
=
∑
f
(
)
(i,j) ,
(
i,j
)
∈LL
(5)
Where is the number of the multi exposure
images and f
(
i,j
)
is a coefficient from the low pass
sub-band of the wavelet transform.
2.3 Reconstructing the Fused Image
After obtaining low and high frequency sub-bands of
CT and low frequency sub-band of WT as above, the
fused image is constructed using inverse WBCT.
3 EXPERIMENTAL RESULTS
Experiments were conducted five sets of multi-
exposure images obtained with a hand held camera
(i.e. to add camera shake) for testing the image
registration prior to the multi-exposure image fusion.
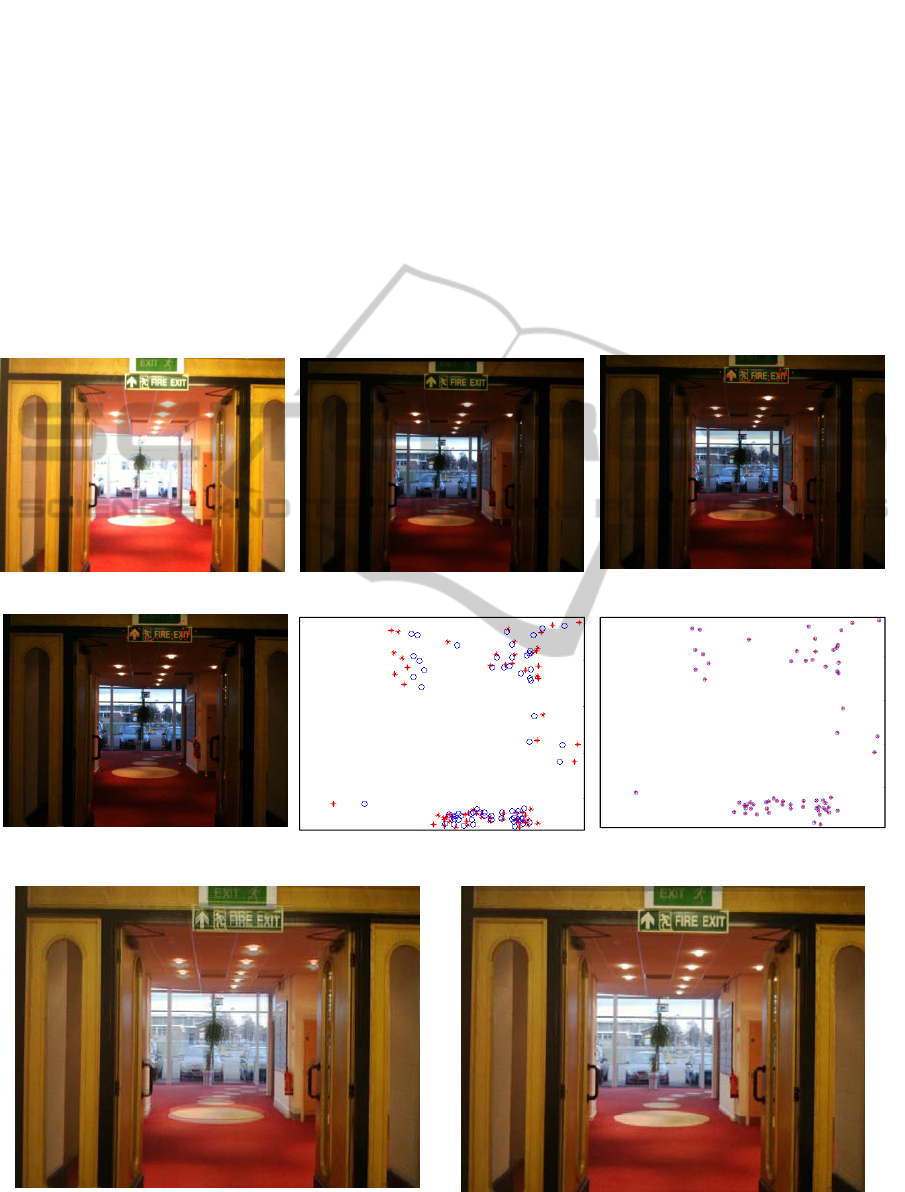
The sample results illustrated in figure 1 for one
image set prove that the proposed approach is
capable of producing fused images of noticeably
good quality.
The images were taken allowing the free
movement of the camera, i.e. allowing shake. All
images were Gamma corrected before processing by
the proposed algorithms. Figure 1(a) is the base
image (over exposed) and Figure 1(b) is an
unregistered image of a different exposure setting
(under exposed), which is intended to be aligned
with the base image. The SIFT key feature points
found as a result of applying SIFT on the under-
exposed image is illustrated in Figure 1(c) [note the
SIFT key-points of the underexposed image is not
illustrated but could have been illustrated similarly].
Subsequently using the RANSAC algorithm (Figure
1(d)) the mismatched points are eliminated and
finally by using the CPD algorithm the two images
are registered [observe key-point matching with
[Figure 1(f)) and without (Figure 1(e)) prior
registration]. Figure 1(g) illustrates the fusion result
without prior registration of images indicating a
blurry and smudgy nature on some parts of the
image while Figure 1(h) illustrates the positive
impact of prior image registration using the
proposed algorithm. It can be seen that the quality
has been increased in the form of increased
sharpness and more details being observable.
4 CONCLUSIONS
In this paper a multi-exposure fusion approach has
been proposed that provides effective compensation
for camera shake. We have provided experimental
results on a standard set of multi-exposure images
with movement and a specifically captured
additional set of images to analyse the performance
of the proposed approach. Results indicate that the
proposed approach is capable of effective multi-
exposure image fusion under camera shake.
REFERENCES
Alsam, A. (2010). Multi Exposure Image Fusion. NIK.
Retrieved from: http://tapironline.no/fil/vis/344
Eslami, R. & Radha, H. (2005). Wavelet-based Contourlet
Packet Image Coding. Conf. on Image Proc.3189-
3192.doi:10.1109/CIP.2004.1421791
Fischler, M. & A., Bolles, R. (1981). Random sample
consensus: A paradigm for model fitting with
applications to image analysis and automated
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
184
cartography. 381-395. doi:10.1145/ 358669.358692
Lee, S. & Wey, H. (2009). Image registration for multi-
exposed HDRI and motion Deblurring. Computational
Imaging. doi:10.1117/12.805767
Lowe, D. (2004). Distinctive image features from scale
invariant keypoints. Intl. Computer Vision. 60(2). 91-
110.
Myronenko A., (2010). Point-Set Registration: Coherent
Point Drift. IEEE Trans. on Pattern Analysis and
Machine Intelligence, 32(12), 2262-2275
Tomaszewska, A. & Mantiuk, R., (2007). Image
registration for multi-exposure high dynamic range
image acquisition. Intl. Conf. on Computer Graphics,
Visualization & Vision. 49-56.
Zafar, I., Edirisinghe, E. & Bez, H. (2006). Multi-exposure
& focus image fusion in transform domain, IET Conf.
606.doi:10.1049/cp:20060600
APPENDIX
(a) Over Exposed (b) Under Exposed
(c) SIFT keypoint extraction on under
exposed image
(d) Keypoints that remain after RANSAC
(e) Keypoints before registration using
CPD
(f) Keypoints after registration using CPD
(g) Fused image without prior registration
(h) Fused image with prior registration
Figure 1: Experimental dataset.
CONTOURLET BASED MULTI-EXPOSURE IMAGE FUSION WITH COMPENSATION FOR
MULTI-DIMENSIONAL CAMERA SHAKE
185
