
AN ALTERNATIVE TO SCALE-SPACE REPRESENTATION
FOR EXTRACTING LOCAL FEATURES IN IMAGE RECOGNITION
Hans Jørgen Andersen and Giang Phuong Nguyen
Media Technology Section, Department of Architecture, Design and Media Technology, Aalborg University,
Niels Jernes Vej 14, Aalborg, Denmark
Keywords:
Local Descriptors, Image Features, Triangular Representation, Image Retrieval, Image Recognition.
Abstract:
In image recognition, the common approach for extracting local features using a scale-space representation
has usually three main steps; first interest points are extracted at different scales, next from a patch around
each interest point the rotation is calculated with corresponding orientation and compensation, and finally a
descriptor is computed for the derived patch (i.e. feature of the patch). To avoid the memory and computational
intensive process of constructing the scale-space, we use a method where no scale-space is required This is
done by dividing the given image into a number of triangles with sizes dependent on the content of the image,
at the location of each triangle. In this paper, we will demonstrate that by rotation of the interest regions at the
triangles it is possible in grey scale images to achieve a recognition precision comparable with that of MOPS.
The test of the proposed method is performed on two data sets of buildings.
1 INTRODUCTION
The use of local features has during the last years
proven as an powerful method for recognition of ob-
jects, places and navigation (Zhou et al., 2009; Koeck
et al., 2005; Zhi et al., 2009; Huang et al., 2009)
The advantages of using local features lead to an in-
creasing number of researches exploring these and a
comprehensive overviews can be found in (Mikola-
jczyk and Schmid, 2005; Tuytelaars and Mikolajczyk,
2008).In this study we will concentrate on its use for
building recognition, using the method recently intro-
duced by the authors (Nguyen and Andersen, 2010).
The ambition is to develop a method that is less com-
putational expense compared to scale-space methods
and hence suitable for implementation on resource
limited devices as mobile phones or tablets.
Up to now, local features is mostly known as
descriptors extracted from areas located at interest-
ing points (Tuytelaars and Mikolajczyk, 2008). This
means that, existing methods first detect interesting
points, for example using Harris corner detector (Har-
ris and Stephens, 1988). Then a patch is drawn which
is centered at the corresponding interest point, and de-
scriptors are computed from each patch. So, the main
issue is how to define the size of the patch. In other
words, how to make these descriptors scale invariant.
To satisfy this requirement, these methods need to lo-
cate a given image at different scales, or so called the
scale-space approach. A given image is represented in
a scale-space using difference of Gaussian and down
sampling (Lowe, 2004; Brown et al., 2005; Nguyen
and Andersen, 2008). The size of a patch depends on
the corresponding scale where the interest point is de-
tected.
In short, the common approach for extracting lo-
cal features using a scale-space representation have
usually three main steps; first extract interest points
at each scale, next from a patch around each interest
point calculate the rotation and compensate for this,
and finally compute a descriptor at each interest point
(i.e. feature of the patch).
In the paper (Nguyen and Andersen, 2010) we
proposed an alternative to the first step approximat-
ing the scale-space using bTree triangular encoding
as introduced by (Distasi et al., 1997). This method
divides the image into triangles of ”homogenous” re-
gions. The process is done automatically and if an
object appears at different scales, the triangular rep-
resentation will adapt to draw the corresponding tri-
angle size. Each triangle may be view upon as an
interest region or ”point”. In our previous study, we
investigated the use of gray scale or color information
for triangle descriptors. We demonstrated that using
color we could achieve an performance in accordance
with the MOPS method (Brown et al., 2005) and that
341
Jørgen Andersen H. and Phuong Nguyen G..
AN ALTERNATIVE TO SCALE-SPACE REPRESENTATION FOR EXTRACTING LOCAL FEATURES IN IMAGE RECOGNITION.
DOI: 10.5220/0003836203410345
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 341-345
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
the method is comparable in terms of repeatability
with other local feature detection methods using the
test introduced by (Mikolajczyk and Schmid, 2005).
In this paper we will demonstrate that by rotation of
the interest regions it is possible even in grey scale
images to achieve a recognition precision comparable
with that of MOPS.
The paper is organized as follows. In the next sec-
tion, we will review a description of our approach us-
ing triangular representation for detection of homoge-
nous regions, and how to compute local descriptors.
In section 4, we introduce the proposed method for
rotation of the interest regions before calculation of
the descriptors. Experimental results in a image re-
trieval system are carried out in section 5.
2 INTEREST POINT DETECTOR
As mentioned above, the BTree triangular coding
(BTTC) is a method originally designed for image
compression (Distasi et al., 1997). For compression
purpose, the method tries to find a set of pixels from
a given image that is able to represent the content of
the whole image. This means that given a set of pix-
els, the rest of the pixels can be interpolated using this
set. In the reference, the authors divide an image into
a number of triangles, where pixels within a triangle
can be interpolated using information of the three ver-
tices. The same idea can be applied to segment an im-
age into a number of local areas, where each area is a
homogenous triangle.
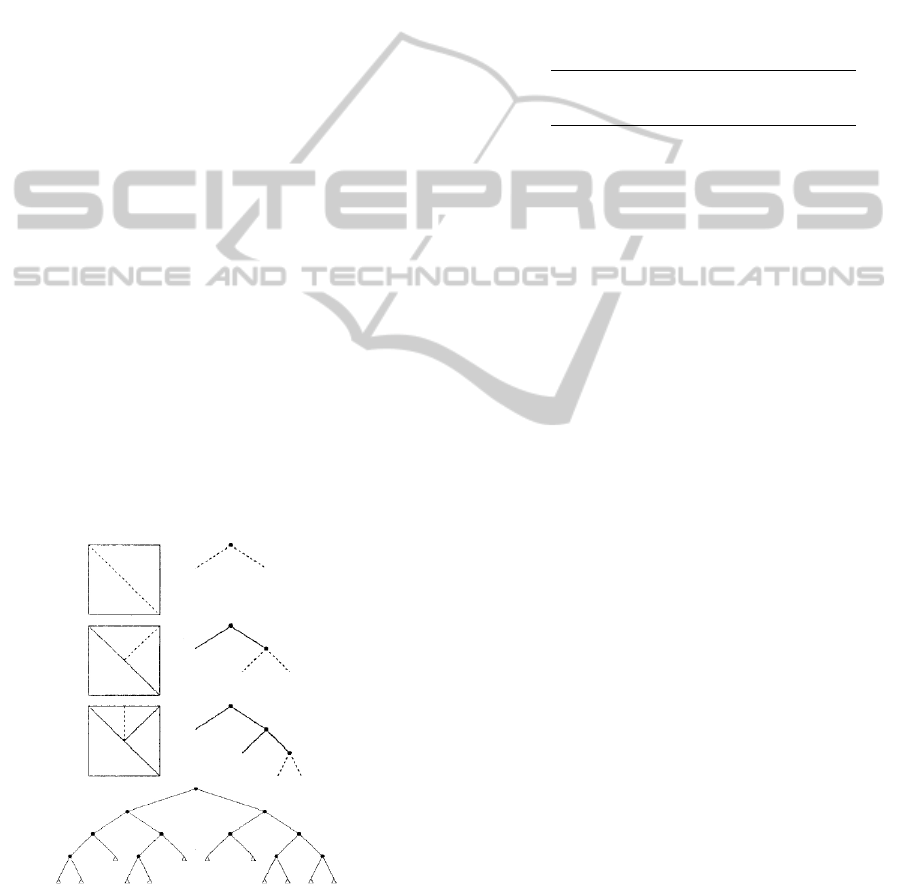
Figure 1: An illustration of building BTree using BTTC.
The last figure shows an example of a final BTree.
A given image I is considered as a finite set of
points in a 3-dimensional space, i.e. I = {(x, y, c)|c =
F(x, y)} where (x, y) denotes pixel position, and c is
an intensity value. BTTC tries to approximate I with
a discrete surface B = {(x, y, d)|d = G(x, y)}, defined
by a finite set of polyhedrons. In this case, a poly-
hedron is a right-angled triangle (RAT). Assuming a
RAT with three vertices (x
1
, y
1
), (x
2
, y
2
), (x
3
, y
3
) and
c
1
= F(x
1
, y
1
), c
2
= F(x
2
, y
2
), c
3
= F(x
3
, y
3
), we have
a set {x
i
, y
i
, c
i
}
i=1..3
∈ I. The approximating function
G(x, y) is computed by linear interpolation:
G(x, y) = c
1
+ α(c
2
− c
1
) + β(c
3
− c
1
) (1)
where α and β are defined by the two relations:
α =
(x − x
1
)(y
3
− y
1
) − (y − y
1
)(x
3
− x
1
)
(x
2
− x
1
)(y
3
− y
1
) − (y
2
− y
1
)(x
3
− x
1
)
(2)
β =
(x
2
− x
1
)(y − y
1
) − (y
2
− y
1
)(x − x
1
)
(x
2
− x
1
)(y
3
− y
1
) − (y
2
− y
1
)(x
3
− x
1
)
(3)
An error function is used to check the approximation:
err = |F(x, y) − G(x, y)| ≤ ε, ε > 0 (4)
If the above condition is not met then the tri-
angle is divided along its height relative to the hy-
potenuse, replacing itself with two new RATs. The
coding scheme runs recursively until no more division
takes place. In the worst case, the process is stopped
when it reaches to the pixel level, i.e. three vertices
of a RAT are three neighbor pixels and err=0. The
decomposition is arranged in a binary tree. Without
loss of generality, the given image is assumed hav-
ing square shape, otherwise the image is padded in
a suitable way. With this assumption, all RATs will
be isosceles. Finally, all points at the leave level are
used for the compression process. Figure 1 shows an
illustration of the above process.
In the reference (Distasi et al., 1997), experi-
ments prove that BTTC produces images of satisfac-
tory quality in objective and subjective point of view.
Furthermore, this method is very fast in execution
time, which is also an essential factor in any process-
ing system. We note here that for encoding purpose,
the number of points (or RAT) is very high (up to
several ten thousand vertices depending on the image
content). However, we do not need that detail level, so
by increasing the error threshold in Eq.(4) we obtain
fewer RATs while still fulfilling the homogenous re-
gion criteria. Examples using BTTC to represent im-
age content with different threshold values are shown
in figure 2.
3 DESCRIPTOR COMPUTATION
For description of the homogenous regions we use the
gray-scale histogram. For estimation of the rotation
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
342

(a) (b)
(c) (d)
Figure 2: Examples of BTTC for extracting triangles.
a descriptor of each triangle is computed similar to
method used in MOPS (Brown et al., 2005). First it
computes the rotation of the patch using gradient val-
ues with a resolution of 10 orientation-bins. The patch
is rotated according to the direction with the highest
value of gradients. The rotated patch is then sampled
into 8x8 areas. Accordingly, for each area the aver-
age gray scale value is computed, so finally we have
a 64-dimensional feature vector.
4 ORIENTATION ESTIMATION
The BTTC encoding accounts for changes in scales
but are sensitive to changes in rotation as the area used
for calculation of the descriptor may change signif-
icantly. To compensate for this we will introduce a
method inspired by that used in (Lowe, 2004; Brown
et al., 2005).
For each triangle its center point µ is calculated by
the average of the three vertices υ
1,2,3
as described in
Eq. 5. A square patch with its size determined by
the maximum minus the minimum of the vertices Eq.
6 is then placed with its center at the triangles center
point.
µ =
1
3
3
∑
i=1
υ
i
(5)
size of patch = max (υ
1,2,3
) − min(υ
1,2,3
) (6)
Within the square the gradients is calculated and
summed in bins with a resolution of 10 degrees. The
Figure 3: Triangle with initial square patch around µ the
center point of the square defined by the vertices, υ
1,2,3
. In
dark blue the rotated patch according to the orientation of
the gradients in the initial square patch.
maximum bin is found and the patch is rotated ac-
cording to this, see figure 3. In this way the method
is similar to the SIFT and MOPS approach (Lowe,
2004; Brown et al., 2005). The descriptor is now de-
rived from the rotated patch.
5 EXPERIMENTAL SETUP
5.1 Databases
Our experiments were carried out with two datasets.
The first one is called the AaU dataset, where im-
ages are captured different buildings/objects in the
area of Aalborg University. This dataset contains of
410 images of 21 buildings, which is on average 20
images for each building. The reason for this rather
large number per building is that we captured those
buildings through the year including different imag-
ing conditions such as weather and light sources. It
should also be noted that all the buildings in the area
are quite similar in their textures (for examples, brick
wall or glasses). Moreover, images of the same build-
ing are taken at different viewpoints, rotations, and
scales. In figure 4, we show example images of the
same building.
The second dataset was taken from (Shao et al.,
2003). This database contains images of different
Zurich city buildings. We randomly select a set of 40
buildings, creating a database of 201 images. Each
building was also taken with five different scales,
viewpoints or orientations.
5.2 Evaluation
Evaluation of local features is based on image retri-
AN ALTERNATIVE TO SCALE-SPACE REPRESENTATION FOR EXTRACTING LOCAL FEATURES IN IMAGE
RECOGNITION
343
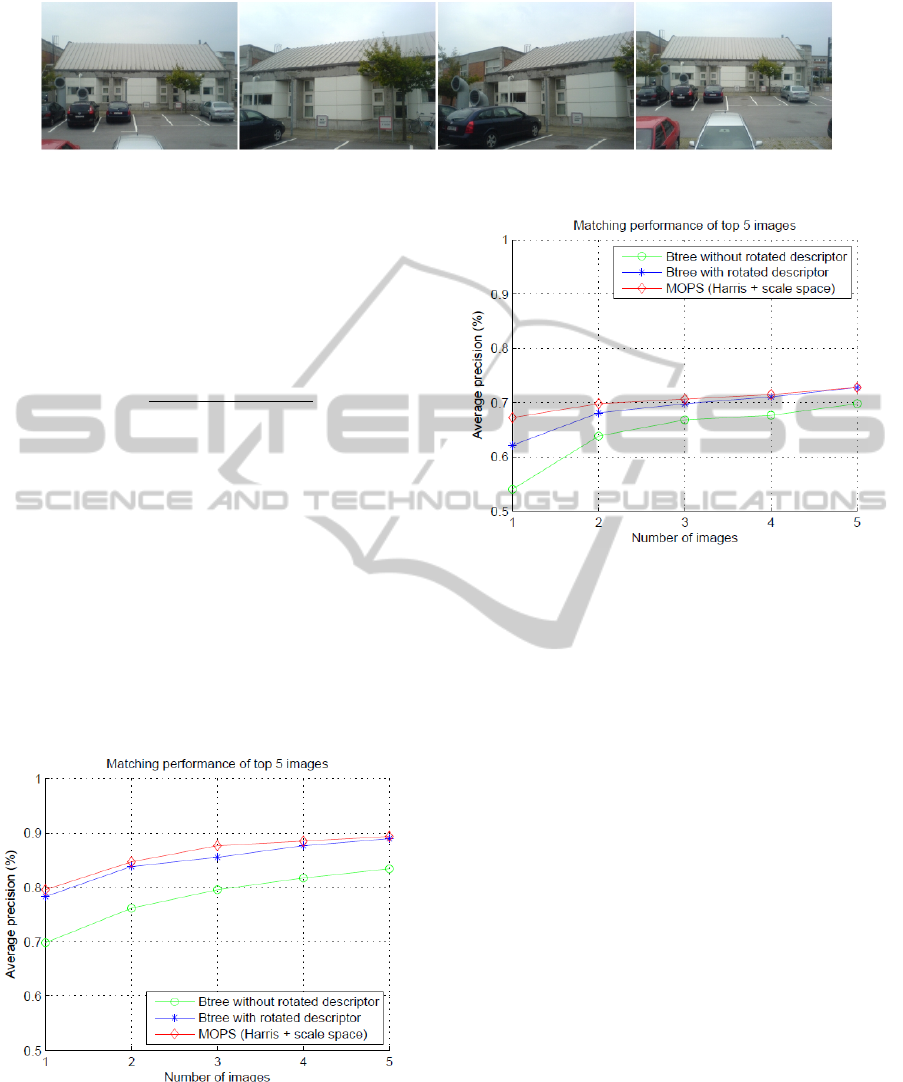
Figure 4: An example of images taken from the same building.
eval performance. To do so, we sequentially use im-
ages from the given dataset as a query image. Local
features are extracted from the query image and com-
pared to features of all other images in the dataset.
The top 5 best matching are returned and groundtruth
is manually assigned to corresponding building to
compute the precision rate:
precision =
# of correct matches
# of returned images
(%). (7)
6 RESULTS AND DISCUSSION
The average retrieval rate for the two data sets are
shown in figure 5 and 6 We also report the retrieval
performance using the multi-scale oriented patches
(MOPS) (Brown et al., 2005), which applies the com-
mon approach using a 5 scale-space representation,
for comparison. From the figures it is evident that the
rotation of the local interest points increase the perfor-
mance by 10% for the first image decreasing to below
5% for the fifth image.
Figure 5: Precision vs. number of returned images for the
AaU data set.
The results show that adding the rotation to de-
scriptors, the proposed method has a compatible per-
formance with the MOPS. Besides, the complexity of
the method is much less compared to the scale-space
Figure 6: Precision vs. number of returned images for the
Zurich data set.
approaches, since it does not require the scale-space
structure for extracting descriptors at each scale level.
The two methods was implemented in C++ and
their processing time logged using a desktop Pc with
an AMD Athlon 2.20 GHz processor with 4G RAM.
The result from a paired t-test of this initial study
showed that the Btree method in terms of processing
time per feature is significant (p < 0.001) faster than
MOPS. The increase in per feature point processing
time is between 10-15%. However, because the Btree
method use more feature points than MOPS, it is only
significant faster for the Zurich dataset (p < 0.001) in
terms of the total processing time per image, whereas
MOPS is faster for the AaU data set (p < 0.01). The
average time processing per image was for the AaU
data set 483 msec. for the Btree method and 444
msec. for MOPS, whereas for the Zurich data set the
average processing time per image was 506 msec. for
the Btree method and 567 msec. for MOPS. So, to
draw any firm conclusions a more thorough perfor-
mance evaluation has to be done, including aspects as
varying threshold for homogenous regions etc.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
344

7 CONCLUSIONS
In this paper, we propose bTree triangular encoding
as introduced by (Distasi et al., 1997) for detection of
local interest points. This method divides the image
into triangles of homogenous regions. The process
is done automatically and if an object appears at dif-
ferent scales, the triangular representation will adapt
to draw the corresponding triangle size. Each triangle
may be view upon as an interest region or ”point”. We
demonstrate that by rotation of the interest regions it
is possible in grey scale images to achieve a recogni-
tion precision comparable with that of MOPS. With-
out the scale-space construction, the method is sim-
pler and less computational expense. Therefore, it is
suitable for usage on platforms with limited resources
as mobile phones or tablets.
REFERENCES
Brown, M., Szeliski, R., and Winder, S. (2005). Multi-
image matching using multi-scale oriented patches. In
Proceedings of the IEEE Conference on Computer Vi-
sion and Pattern Recognition, volume 1, pages 510–
517.
Distasi, R., Nappi, M., and Vitulano, S. (1997). Image com-
pression by B-Tree triangular coding. IEEE Transac-
tions on Communications, 45(9):1095–1100.
Harris, C. and Stephens, M. (1988). A combined corner
and edge detector. Proceedings of the Alvey Vision
Conference, pages 147–151.
Huang, S., Cai, C., Zhang, Y., He, D. J., and Zhang, Y.
(2009). An efficient wood image retrieval using surf
descriptor. 2009 International Conference on Test and
Measurement, 2:5558.
Koeck, J., Li, F., and Yang, X. (2005). Global localization
and relative positioning based on scale-invariant key-
points. Robotics and Autonomous Systems, 52(1):27 –
38.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Mikolajczyk, K. and Schmid, C. (2005). A perfor-
mance evaluation of local descriptors. IEEE Trans-
actions on Pattern Analysis & Machine Intelligence,
27(10):1615–1630.
Nguyen, G. and Andersen, H. (2008). Urban building
recognition during significant temporal variations. In
Proceedings of the IEEE Workshop on Applications of
Computer Vision, pages 1–6.
Nguyen, G. P. and Andersen, H. J. (2010). A new approach
for detecting local features. In International Confer-
ence on Computer Vision Theory and Applications,
pages 1–6. Institute for Systems and Technologies of
Information, Control and Communication.
Shao, H., Svoboda, T., and Gool, L. V. (2003). Zubud
zurich buildings database for image based recognition.
Tech report, Swiss Federal Institute of Technology.
http://www.vision.ee.ethz.ch/showroom/zubud/.
Tuytelaars, T. and Mikolajczyk, K. (2008). Local invariant
feature detectors. Foundations and Trends in Com-
puter Graphics and Vision, 3(3):177–280.
Zhi, L. J., Zhang, S. M., Zhao, D. Z., Zhao, H., and Lin,
S. K. (2009). Medical image retrieval using sift fea-
ture. In Proceedings of the 2009 2nd International
Congress on Image and Signal Processing CISP09.
Zhou, H., Yuan, Y., and Shi, C. (2009). Object tracking
using sift features and mean shift. Computer Vision
and Image Understanding, 113(3):345 – 352.
AN ALTERNATIVE TO SCALE-SPACE REPRESENTATION FOR EXTRACTING LOCAL FEATURES IN IMAGE
RECOGNITION
345
