
ARDO: AUTOMATIC REMOVAL OF DYNAMIC OBJECTS
Exclude Moving Objects Automatically from a Collection of Images
using a Consumer Camera
Patrik Goorts and Philippe Bekaert
Expertise Centre for Digital Media, Hasselt University, Wetenschapspark 2, 3590 Diepenbeek, Belgium
Keywords:
Object Removal, Image Synthesis, Feature Detection, Image Registration, Median, Linear System.
Abstract:
We present a novel method to remove tourists, cars and other moving objects from photos of monuments,
buildings and other attractions. Typically, this is a manual process. Nevertheless, our method is fully automatic
and requires neither image stabilization or advanced hardware during acquisition. The method requires a set
of images taken from roughly the same location using any consumer photo or video camera and synthesizes
the decluttered result using two phases. In the first phase, these images are aligned on to each other using
image features and affine transformations. The second phase merges the images to the final result using a
median-based per pixel filtering. The results are pleasant looking, even with moving clouds and trees, and
outperforms other techniques considering quality and manual intervention.
1 INTRODUCTION
When making holiday pictures, these photos are typ-
ically cluttered with tourists, cars and other moving
objects. This can be undesirable, especially when try-
ing to photograph monuments, buildings and other at-
tractions. It is, most of the time, not possible to ask
people to leave the scene to take a picture. To solve
this problem, we introduce an algorithm to create a
decluttered photo of the scene, without tourists and
cars, using a number of images taken with a standard
handheld camera. It is sufficient to stay roughly at
the same location; no tripods or other stabilization de-
vices are needed. The algorithm is fully automatic;
only the images are needed as input and the method
requires no manual intervention whatsoever.
Alternatively, a video sequence can be used. This
will result in a larger number of images, thus more
data for a correct result.
The method requires a few seconds between every
input image to give the best result. This is to ensure
that the difference between the images is large enough
to detect motion. When the motion is limited, it might
be necessarily to increase the time between the acqui-
sition of the images. If video input is used, this re-
quirement can be met by using only one frame or less
per second, and dropping unnecessary frames. Typi-
cally, only 5 to 10 images are required if the motion
of the moving objects is large enough and the total
amount of objects is limited. However, when using
a crowded scene, it might be necessarily to acquire
more images. Using video input, 30 seconds to a few
minutes should suffice to obtain good results.
The algorithm uses two phases: aligning (register-
ing) the images and merging the images in the final
result. First, all images are aligned such that it looks
like every photo is taken from exactly the same posi-
tion. The alignment step is done using spatial image
features. Secondly, these aligned images are merged
in the final result using a median-based per pixel filter-
ing. This will result in the removal of moving objects
in the scene; only the static scene itself is kept.
2 PREVIOUS WORK
There are some other techniques to remove tourists
from photos, however each with their drawbacks. In
the age of analog photography, moving objects were
removed using long exposure times,which was too
long to register walking persons. In digital photos, ob-
jects can be removed from a sequence of images using
Photoshop (or a similar application) (Hoffman, 2010).
However, the technique requires a lot of manual in-
tervention. All the images should be taken from the
same location using a tripod, or the alignment should
be done using manual transformations. This process
192
Goorts P. and Bekaert P..
ARDO: AUTOMATIC REMOVAL OF DYNAMIC OBJECTS - Exclude Moving Objects Automatically from a Collection of Images using a Consumer
Camera.
DOI: 10.5220/0003843001920196
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 192-196
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
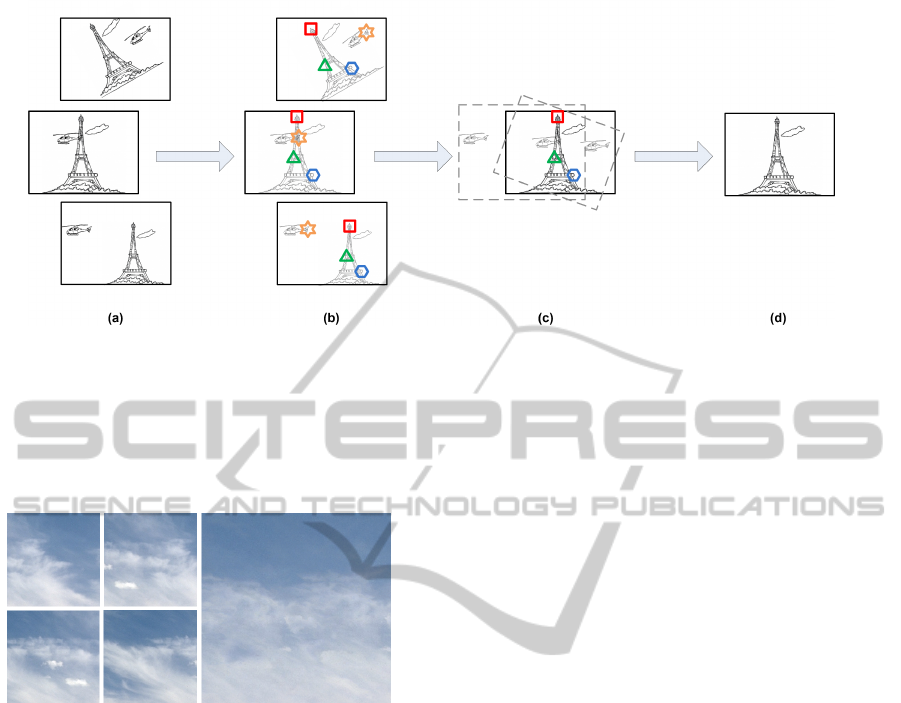
Figure 1: Overview of the algorithm. In the first phase, matching features are detected between the reference image (middle
image) and the other images (b). These images are then registered using these features by calculating a homography between
the reference image and the other images (c). In the second phase (d), these images are synthesized using a median-based per
pixel filtering.
is time intensive and error-prone.
Figure 2: Calculating the median of clouds will not result in
an image that is correct with respect to the input, but is still
plausible and sufficient for the final image.
Inpainting can be used to remove objects from a
single image (Bertalmio et al., 2000). However, this
will not give a correct image of the desired scene, be-
cause the lack of information. Texture and fine detail
is lost and must be reconstructed from visible patches
in the scene. This method also requires a lot of man-
ual work to generate plausible results, nonetheless,
only one image is required.
The tourist remover application of Snapmania
(Snapmania, 2011) provides an automatic way to re-
move tourists from a set of photos. No information is
provided about the method. We tested the application
using our data sets (see section 4).
Agarwala et al. (Agarwala et al., 2004) describe
an interactive technique to remove elements from a set
of photos using optimization. The user paints strokes
where the tourists are and the algorithm constructs a
new image using this input. A cost function is min-
imized using graph cuts to construct the final image.
This algorithm also has applications in image stitch-
ing, portrait compositing and creating of image mo-
saics. This method produces good quality results even
when using a small number of images, but requires
user input to detect the tourists.
3 METHOD
The algorithm consists of two parts. The first part reg-
isters the images using feature descriptors. The sec-
ond part merges the registered images in a final image.
An overview of the method is given in Figure 1.
3.1 Registration
Registering images is the process of calculating a
transformation from one coordinate system to an-
other, such that every image shares the same coordi-
nate system i.e. all image are aligned to one another
(Szeliski, 2006). For this application, we consider
only affine transforms of the image, such as transla-
tion, rotation and scaling. The transforms of the im-
ages are only affine, because we use the same camera
for a static scene during the whole acquisition. This
linear transformation of one image to another is rep-
resented by a homography using a 3-by-3 matrix H
(Hartley and Zisserman, 2000).
p
r
= H
c
p
c
=
h
11
h
12
h
13
h
21
h
22
h
23
h
31
h
32
h
33
x
c
y
c
1
(1)
where p
r
is an image point in the reference image
and p
c
an image point in the image being processed.
ARDO: AUTOMATIC REMOVAL OF DYNAMIC OBJECTS - Exclude Moving Objects Automatically from a Collection
of Images using a Consumer Camera
193
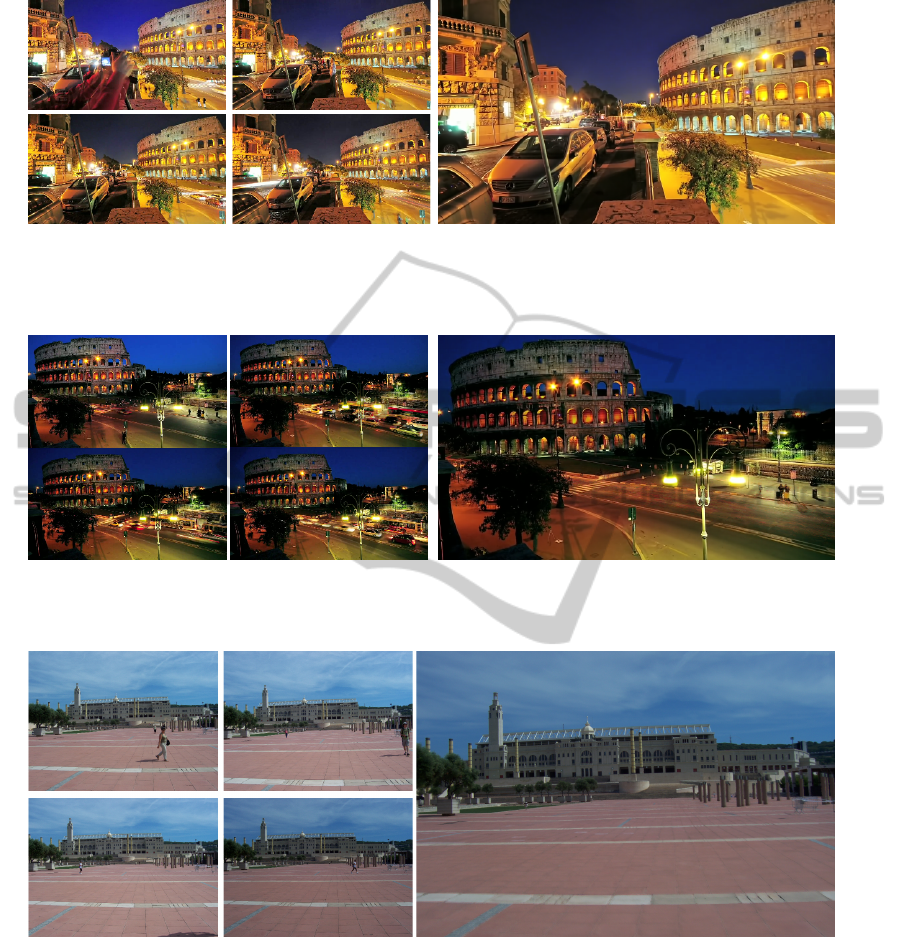
Figure 3: Result from a video input using 40 frames. The camera, the cars and the tourists before the Colosseum are suc-
cessfully filtered out. There is a difference in lighting in the different input images, but this is not noticeable in the final
result.
Figure 4: Result from a video using 40 frames. This sequence contains a lot of large objects (cars, buses). These are all
filtered out successfully.
Figure 5: Result from 8 pictures using a low budget camera. This set contains a lot of translations and rotations. The result is
sharp, which demonstrates the correct registration of the images. Notice that the clouds are washed out, but are still plausible.
The matrix is calculated with a linear system using
image features as input.
For every image, we calculate a set of scale and
rotational invariant, spatial image features using SIFT
(Lowe, 1999). Using these features, we calculate the
matches between an arbitrary chosen reference image
and every other image. Because SIFT features are in-
variant to translation, rotation and scaling, the match-
ing will be robust for this application.
Using these feature matches, we calculate a ho-
mography between the chosen reference image and
every other image. This homography is acquired by
solving the linear system defined by the homography
and the matched features. For every homogeneous
feature position f
r
= [x
r
, y
r
, 1]
T
in the reference im-
age and the matching homogeneous feature position
f
c
= [x
c
, y
c
, 1]
T
in the image being processed, we ac-
quire two linear equations from equation 1:
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
194

Figure 6: Comparison of the method of Snapmania (Snapmania, 2011) (left figure) and our method (right figure). Our method
results in higher quality images.
h
11
x
c
+h
12
y
c
+h
13
h
31
x
c
+h
32
y
c
+h
33
≈ x
r
h
21
x
c
+h
22
y
c
+h
23
h
31
x
c
+h
32
y
c
+h
33
≈ y
r
(2)
h
ab
is the element in H
c
at row a and column b.
This results in a linear system of 2n equations and
9 unknowns, where n is the number of matched fea-
tures. This system will not have a solution, due to
small rounding errors in the feature positions, errors
in the matching process, et cetera. Therefore, to solve
the equation, we will minimize the sum of the repro-
jection errors:
∑
f
x
r
−
h
11
x
c
+h
12
y
c
+h
13
h
31
x
c
+h
32
y
c
+h
33
2
+
y
r
−
h
21
x
c
+h
22
y
c
+h
23
h
31
x
c
+h
32
y
c
+h
33
2
(3)
Due to the motion of the objects, not all fea-
ture pairs will satisfy the homography. These feature
pairs will be outliers and must be filtered out to ac-
quire a correct homography. The system is solved us-
ing the Least Median of Squares (LMeDS) method
(Rousseeuw et al., 1987), which incorporates outliers
such that only 50% of the features must be inliers and
no threshold should be defined beforehand. LMeDS
selects a number of random features and calculates a
homography using least-squares. Then we calculate
the median of the reprojection error of every feature,
including the features not selected for the calculation
of the homography. We select the homography for
which this median is minimal.
Typically, RANSAC is used to remove outliers
(Hartley and Zisserman, 2000). However, this algo-
rithm is depending on a threshold and can categorize
too many inliers as outliers. This will result in an in-
sufficient set of data points, thus in an incorrect and
blurred result. The LMeDS method, however, will
even work when there are only a few matches.
Feature tracking is used before in image stabiliza-
tion algorithms (Censi et al., 1999; Hu et al., 2007;
Battiato et al., 2007). Alternatively, more advanced
video stabilization algorithms can be used to regis-
ter the images. Typical methods use a kalman filter
to model intentional motion and handle unintentional
motion as noise, using features (Pinto and Anurenjan,
2011) or pixel intensities (Litvin et al., 2003) as input.
Other methods use optical flow (Chang et al., 2002) or
the frequency domain (Kumar et al., 2011) to detect
global image motion.
These methods also incorporate intentional cam-
era motion, such a walking around the building. The
more advanced algorithms will only remove small
and local movements and keep the large, intentional
movements. Our method uses a reference image and
does not output a video sequence where certain kind
of movements must be kept. Therefore, our method
will not need these kind of advanced methods.
3.2 Image Synthesis
Once the homographies between the images and an
arbitrary chosen reference image are calculated, we
can map every pixel of the images to the reference
image. The registered images are then merged in the
final result using the median for every mapped pixel.
If the desired scene is visible in the majority of the im-
ages, calculating the median will provide the correct
result. A more cluttered foreground hence requires
more images.
4 RESULTS
To demonstrate the technique, we acquired a set of
photos and videos from monuments.
When using videos, not every frame is used. The
difference between consecutive frames is too small to
provide extra useful information. Using every frame
will not provide better results, but will only increase
the running time of the method. Therefore, we will
only use one frame every 2 seconds.
The amount of clutter determines the amount of
ARDO: AUTOMATIC REMOVAL OF DYNAMIC OBJECTS - Exclude Moving Objects Automatically from a Collection
of Images using a Consumer Camera
195

photos needed. The desired scene should be visible
in the majority of the images. If many persons are
located on the same location in most of the photos, the
required scene is not visible, and the method won’t be
able to generate a plausible result.
As shown in Figure 2, moving backgrounds (like
clouds and trees) won’t necessarily result in bad im-
ages. The result is not the same as in any image, but
still plausible and pleasant looking. This is also valid
for changes in lighting, as can be clearly seen in Fig-
ure 3.
The method works best when the distance to the
desired scene is large and the movement of the cam-
era is limited. This will reduce the effects of par-
allax caused by movements of the camera. Because
the registration uses only linear transformations from
one image to another, no parallax effects can be incor-
porated. If the parallax is large, the registration will
be inaccurate, resulting in a blurred image. Incorpo-
rating parallax remains an open problem until today
(Szeliski, 2006).
We compared our method with other methods. As
can be seen in Figure 6, our method generates more
plausible results compared with the tourist remover
application of Snapmania (Snapmania, 2011). Their
method cannot handle relighting very well.
The group shot application of Agarwala et al.
(Agarwala et al., 2004) provides good results com-
pared with our method, but requires a lot of user input,
which makes it more difficult to use. However, their
method works better when using only 2 or 3 images.
5 CONCLUSIONS
We presented an automatic method to remove tourists,
cars and other moving objects from a set of pho-
tos, while keeping the static scene. Typically, 5 to
10 photos are needed, with a few seconds between
each photo. Alternatively, a video sequence can also
be used. The algorithm uses features to calculate a
transformation between the different images, so that
no tripods or other advanced stabilization devices are
needed during the acquisition of the photos. As can be
seen from the results, the final result is plausible and
pleasant looking. However, the image is not neces-
sarily correct when there are specific background ele-
ments, like clouds or other slow moving objects. This
is not a problem, because the focus of the application
is on the static scene and the generated clouds and
trees are still plausible. The method outperforms ex-
isting techniques when using sufficient input images,
considering the quality of the result and the manual
input required.
ACKNOWLEDGEMENTS
Patrik Goorts would like to thank the IWT for its PhD
specialization bursary.
REFERENCES
Agarwala, A., Dontcheva, M., Agrawala, M., Drucker, S.,
Colburn, A., Curless, B., Salesin, D., and Cohen,
M. (2004). Interactive digital photomontage. In
SIGGraph-04, pages 294–302.
Battiato, S., Gallo, G., Puglisi, G., and Scellato, S. (2007).
Sift features tracking for video stabilization. In Im-
age Analysis and Processing, 2007. ICIAP 2007. 14th
International Conference on, pages 825–830. IEEE.
Bertalmio, M., Sapiro, G., Caselles, V., and Ballester, C.
(2000). Image inpainting. In Proceedings of the 27th
annual conference on Computer graphics and interac-
tive techniques, pages 417–424. ACM Press/Addison-
Wesley Publishing Co.
Censi, A., Fusiello, A., and Roberto, V. (1999). Image sta-
bilization by features tracking. In Image Analysis and
Processing, 1999. Proceedings. International Confer-
ence on, pages 665–667. IEEE.
Chang, J., Hu, W., Cheng, M., and Chang, B. (2002). Digi-
tal image translational and rotational motion stabiliza-
tion using optical flow technique. Consumer Electron-
ics, IEEE Transactions on, 48(1):108–115.
Hartley, R. and Zisserman, A. (2000). Multiple view geom-
etry, volume 6. Cambridge university press.
Hoffman, M. (2010). Automatic tourist remover.
http://www.tipsquirrel.com/index.php/2010/07/autom
atic-tourist-remover/.
Hu, R., Shi, R., Shen, I., and Chen, W. (2007). Video stabi-
lization using scale-invariant features. In Information
Visualization, 2007. IV’07. 11th International Confer-
ence, pages 871–877. IEEE.
Kumar, S., Azartash, H., Biswas, M., and Nguyen, T.
(2011). Real-time affine global motion estimation us-
ing phase correlation and its application for digital im-
age stabilization. Image Processing, IEEE Transac-
tions on, 99:1–1.
Litvin, A., Konrad, J., and Karl, W. (2003). Probabilis-
tic video stabilization using kalman filtering and mo-
saicking. In Proceedings of SPIE Conference on Elec-
tronic Imaging, pages 663–674. Citeseer.
Lowe, D. G. (1999). Object recognition from local scale-
invariant features. In Computer Vision, 1999., vol-
ume 2, pages 1150–1157. Ieee.
Pinto, B. and Anurenjan, P. (2011). Surf based robust video
stabilization using kalman filter. In ICTT Electronics
and Communication.
Rousseeuw, P., Leroy, A., and Wiley, J. (1987). Robust re-
gression and outlier detection, volume 3. Wiley On-
line Library.
Snapmania (2011). Snapmania tourist remover.
http://www.snapmania.com/info/en/trm/.
Szeliski, R. (2006). Image alignment and stitching: A tu-
torial. Foundations and Trends in Computer Graphics
and Vision, 2(1):1–104.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
196
