
OCCUPANCY ANALYSIS OF SPORTS ARENAS
USING THERMAL IMAGING
Rikke Gade, Anders Jørgensen and Thomas B. Moeslund
Visual Analysis of People Laboratory, Aalborg University, Aalborg, Denmark
Keywords:
Thermal Imaging, Image Processing, Human Detection.
Abstract:
This paper presents a system for automatic analysis of the occupancy of sports arenas. By using a thermal
camera for image capturing the number of persons and their location on the court are found without violating
any privacy issues. The images are binarised with an automatic threshold method. Reflections due to shiny
surfaces are eliminated by analysing symmetric patterns. Occlusions are dealt with through a concavity anal-
ysis of the binary regions. The system is tested in five different sports arenas, for more than three full weeks
altogether. These tests showed that after a short initialisation routine the system operates independent of the
different environments. The system can very precisely distinguish between zero, some or many persons on the
court and give a good indication of which parts of the court that has been used.
1 INTRODUCTION
In the modern world jobs are becoming ever more
sedentary and less physically demanding. This leads
to higher demands for activities in people’s spare
time, which puts a still growing pressure on the sports
arenas. From 1964 to 2007 the number of athletes has
quadrupled with a steady increase (Pilgaard, 2009).
Surveys also show that people are dropping the classic
club sports in favour of more flexible sports (Brixen
et al., 2010). This calls for a better and more optimal
use of the existing sports arenas to keep up with this
growing trend.
In order to improve the utilisation of a sports
arena, its existing use must be examined. This in-
cludes examining the number of users using the arena
at the same time and the occupancy of the court. Ad-
ministrators are especially interested in whether the
arena is empty, used by a few people or full and the
time for when the occupancy changes. The position
of the users is also important as they might only use
half a court, which means the other half could be
rented out to another group. Manual registration of
this would be cumbersome and expensive and an au-
tomatic approach is therefore needed. For such a sys-
tem to work in general it should be independent of the
size of the court, lighting conditions and without any
interaction with the users. This can be obtained with
a camera.
Detecting people with a camera raises some priva-
cy issues though. Not all people like surveillance and
the fear of being observed could keep some people
out of the arenas. This work therefore proposes an au-
tomatic method to analyse the occupancy of a sports
arena using thermal imaging. One of the advantages
of thermal cameras is that the persons recorded cannot
be identified, which is an important factor if the sys-
tem is to be accepted by the users of the sports arena.
On top of that, thermal cameras are invariant to light-
ing, changing backgrounds and colours, which make
them more desirable for a general application.
2 RELATED WORK
Automatic detection and tracking of sports players is
a research area important for all sports analysis. Most
systems are using visual cameras. In (Needham and
Boyle, 2001) a tracking system is proposed specifi-
cally for indoor football players, while (Saito et al.,
2004) proposes a tracking system for outdoor foot-
ball using multiple cameras. The tracking system pro-
posed in (Xing et al., 2011) focuses on more general
sports video and it is tested on both football, basket-
ball and hockey.
The large research area regarding automatic iden-
tification of human subjects and their behaviour in-
clude both visual and thermal cameras. There exist a
number of surveys and books on the subject, includ-
ing (Ko, 2008), (Turaga et al., 2008), (Wei and Yunx-
277
Gade R., Jørgensen A. and B. Moeslund T..
OCCUPANCY ANALYSIS OF SPORTS ARENAS USING THERMAL IMAGING.
DOI: 10.5220/0003843202770283
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 277-283
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

iao, 2009) and (Moeslund et al., 2011).
Thermal cameras measure the amount of thermal
radiation, which lies in the long-wavelength infrared
spectrum (8-15 µm). All objects with a temperature
higher than the absolute zero emit thermal radiation.
The intensity and dominating wavelength depends on
the temperature.
Thermal cameras have a clear advantage over vi-
sual cameras in night conditions, therefore the main
focus for systems using thermal cameras have been
on security applications and trespasser detection. A
few papers with the purpose of detecting trespassers
include (Wong et al., 2009) and (Wong et al., 2010).
Other work using thermal cameras include sys-
tems for pedestrian detection and tracking. In (Wang
et al., 2010) a pedestrian detection method is pre-
sented based on the Shape Context Descriptor with
the Adaboost cascade classifier framework. (Bertozzi
et al., 2003) proposes the pedestrian detection as part
of a driver assistant system while (Davis and Sharma,
2004) proposes a people detection system for differ-
ent environments based on contour analysis.
Most vision systems, including the systems men-
tions above, are only tested on very short video se-
quences, proving the concept in one or few condi-
tions. In this work the most important issue is sta-
bility over a long time period and under different con-
ditions. Therefore the system will be tested over three
weeks and in five different arenas. The main results
will be average values showing the tendency of occu-
pancy for hours or days.
3 METHODS
3.1 System Overview
The desired system should take a thermal grey scale
image as input and find every person in the image. In
order to analyse the nature of the problems related to
this work, five different sports arenas were selected
and used to develop and test the system. During the
initial investigations some typical difficulties to obtain
the result were registered. Some of these difficulties
were occlusions and reflections from both persons and
other warm objects, e.g. lamps, on the floor. These
typical difficulties must all be addressed in order to
make a general system.
As the intention is to monitor the long term use of
a sports arena, the system should always be operat-
ing. Therefore data should be processed in soft real-
time to avoid data pile ups. The output of the system
should be, for a given time, the number of users on
the court and their position.
The system should be independent of the camera’s
viewing angle in relation to the court, as long as the
camera can observe the court and is placed in a suf-
ficient height to avoid users covering each other too
much. The users’ size, level of activity and posture
should not have an effect on the measurement either.
Figure 1 shows a diagram of the system structure.
The overall idea is to develop a system that can
detect persons in a thermal image and, with the in-
puts from the initialisation, find the persons’ positions
at the court. As mentioned in the introduction, the
data should be categorised after the occupancy level
into zero, some and many people and presented in a
timetable.
3.2 Initialising the System
The initialisation routine must be conducted for each
new mounting of the camera. This routine handles the
adjustments necessary to fit the system to the layout of
the actual sports arena. First the court must be found
in the image to avoid that cold or hot objects outside
the court influences the system. As it is only wanted
to measure the players at the court, spectators should
also be removed. Defining the court in the images
gives the opportunity to remove all objects standing
outside the court. During the initialisation the corners
of the visible part of the court should be marked in
the image, and lines connecting them define the out-
line of the court. To find the persons’ positions at
the court a mapping from the image to the court must
be found. Using at least four corresponding points in
image and world coordinates, a homography matrix
H can be calculated (Criminisi, 1997).
After initialising this matrix the mapping between
image coordinates and world coordinates is calculated
as P
w
= H p
i
, where P
w
are the weighted world coor-
dinates [P
X
P
Y
W ]
T
and p
i
are the image coordinates
[p
x
p
y
1]
T
. The real world coordinates are found by
dividing P
w
with the weight W .
At least four corresponding points must be used
in order to calculate H, but tests of the homography
show that using more points increase the precision.
This is due to nonlinearity in the mapping, as the lens
has some barrel effect. Therefore it is desirable to
use as many points in the initialisation as possible.
In this work a two-dimensional grid with steps of 5
metres is used to mark the points at the court. A hot
or cold object is necessary to detect the grid points in
the image.
3.3 Run-time
This continuous loop receives an image from the ther-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
278

Thermal Camera Input
Find Court Corners in the Image
Person Detections
Find each Person's Position
Map to Court Coordinates
Run-time
Initialisation
Y
X
y
x
P
p
P
O
o
X
P
Y
p
x
p
y
Hour
Monday Tuesday Wednesday Thursday Friday Saturday Sunday
7-8
8-9
9-10
10-11
11-12
12-13
13-14
14-15
15-16
16-17
17-18
18-19
19-20
20-21
21-22
22-23
School School School School School
Club
Club Club Club Club
Club
Club
Figure 1: Diagram showing the system steps.
mal camera and after a number of functions it deliv-
ers a set of regions each containing one person. First
the thermal camera captures a grey scale image. The
warm objects (persons) are bright while the surround-
ings are dark grey. After capturing a frame the first
step is to extract the warm objects. For this an auto-
matic threshold method based on Maximum Entropy
is used (Kapur et al., 1985). This method maximises
the sum of the entropy above and below the thresh-
old value s, by iterating through every possible value.
The threshold function is only run for the pixels
inside the court area, to avoid disturbance from spec-
tators. The result is a binary image where ideally the
persons are white and anything else is black. If the
maximum entropy is below a specified threshold TH
there are no persons on the court and the frame can be
discarded.
The white regions are now found using the con-
tour finding algorithm described in (Suzuki and Abe,
1985). If there are no valid regions i.e. regions larger
than a specified minimum area the frame is discarded.
3.3.1 Split Tall Regions
People standing behind each other, seen from the
camera’s point of view, can often be found as one tall
region as shown in figure 2(a). In order to split such
regions into the right number of people, it must be in-
vestigated when a region is too high to contain only
one person. Using the camera’s height c, the vertical
resolution r
v
and vertical field-of-view f
v
of the cam-
era, the height in pixels can be found as a function of
the person’s height p and distance to the camera x:
y
p
=
r
v
·
tan
−1
x
c−p
−tan
−1
x
c
f
v
Statistics show that only 0.26% of Danish conscripts
were taller than 2 metres (DST, 2006), therefore 2
metres is chosen as the height limit. So for each re-
gion found in the image the distance to the camera
is calculated using the homography and if the pixel
height corresponds to more than 2 metres, the algo-
rithm should try to split the region horizontally. This
is done by finding the convex hull and the convexity
defects of the contour, as shown in figure 2(b). The
point selected to split from is the defect point with the
largest depth and a maximum absolute gradient of 1.5.
The gradient is calculated for the line from the defect
point perpendicular on the line between the convexity
defect start and end points (green points and yellow
line in figure 2(c)). The defect point between the legs
of the person has the largest depth, but is discarded
because the gradient is too high. Also the defect point
should not be in the top or bottom fourth of the region,
to avoid e.g. feet or head to be split from the body. As
shown in figure 2(d) the region is split horizontally
from the selected point.
The algorithm starts with the defect point with
largest depth and continues until a point with an ac-
ceptable gradient and location is found. If no accepted
points are found, the region will not be split. If the re-
gion has been split, the algorithm will start over and
examine the height of the resulting regions.
OCCUPANCY ANALYSIS OF SPORTS ARENAS USING THERMAL IMAGING
279

(a) (b) (c) (d)
Figure 2: Example on division of tall regions. Note that
black and white colours are reversed for better visibility.
The blue line is the convex hull, red marks indicate convex-
ity defects and the yellow line the orthogonal depth of the
defect.
3.3.2 Remove Reflections
Just as visible light, infrared waves are also reflected
in glossy surfaces, but as the infrared reflections are
created by the persons themselves they are always
pointing towards the camera. Therefore the mirror
axis will be roughly horizontal, and reflections could
be removed by trying to mirror them in a region
above. An example can be seen in figure 3(a)(Left).
(a) (b)
Figure 3: Persons having their reflection removed. The red
areas mark the reflections after they have been mirrored and
translated. In (b) the reflection is first split from the person
by the algorithm splitting tall regions.
In order to remove reflections the system searches
for regions that are below a larger or equally sized re-
gion. If such a region is found it is mirrored up in the
upper region to see if it fits in the person region. If it
does not, the reflection is translated one pixel horizon-
tally and checked again. This continues up to three
pixels in all directions. If more than 90 % of the re-
flection is within the person region it is marked as a
reflection and removed. Figure 3(a)(Right) shows a
situation where 77 out of 79 pixels are within the per-
son region resulting in a coverage of ≈ 97%.
In some cases the reflection is connected to the
person who created it. See figure 3(b)(Left). In these
situations the region should first be split by the func-
tion splitting tall regions. Figure 3(b) shows a situ-
ation where a region is first split and secondly the
reflection can be removed. Here 72 of 74 (≈ 97%)
reflection pixels are within the person.
3.3.3 Split Wide Regions
People standing close to each other will often form
one large region. In order to count the people correct
such regions must be divided into regions containing
only one person. For groups of people standing side
by side, seen from the camera’s point of view, it will
often be possible to separate them based on their head
position. Since their heads are narrower than the body
they can often be separated by cutting vertically from
the minimum points of the upper edge.
As it is not desired to split regions containing only
one person, two criteria for the regions must be sat-
isfied before looking for a minimum point to split
from. Measuring the features of several regions gives
the criteria that to contain more than one person the
height of the bounding box must be less than five
times the width and the contour of the region must be
longer than the bounding box perimeter. If these cri-
teria are satisfied and a minimum point can be found
at the upper edge of the region, the region will be di-
vided.
The points are now found as convexity defects in
the same way as described for the tall regions. In-
stead of measuring the angle this method uses the y-
coordinates of the points. The found point must be
located on the upper edge of the region and have a
y-value greater than both the convexity defect’s start
and end point to make it a minimum point.
As for splitting the tall regions, the algorithm will
continue until no more regions are split.
3.3.4 Sort Regions
The final step is to sort the regions. After the re-
gions have been split and the reflections have been
removed, the remaining regions are now investigated
before they are counted as a person. If a region’s
area does not match its distance to the camera it is
removed. This could be a small region which is found
in the foreground where persons typically would be
larger. This step also calculates the person’s position
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
280

on the court, using the homography from the initiali-
sation. This is done for the lowest middle pixel of the
accepted regions, which will be the position on the
floor.
3.4 Occupancy of the Court
A user’s position will be given as a x,y coordinate
with multiple decimals. In order to examine the occu-
pancy a method must be found that preserves the po-
sition, but also mimics the size of a person. Therefore
every found region is represented as a 3D gaussian
distribution with a height of 1 and σ = 5, equivalent
to a radius of 1 metre for 95 % of the volume. This
is also roughly the radius of a person. An example
for one frame can be seen in figure 4 where 8 persons
have been found.
Figure 4: A single frame where 8 persons have been found.
For longer periods these frames can be summed to
show the occupancy of the court during e.g. an hour.
4 RESULTS
4.1 Objective
As described in section 2 a very important parame-
ter for the system is the stability in changing condi-
tions and in changing set-ups. Therefore the system
is tested in five different arenas, capturing more than
three weeks altogether. For all tests in different are-
nas the same parameters of the system has been used.
Only the initialisation of the system, described in sec-
tion 3.2, depends on the arena. By measuring the en-
tropy of a number of frames with and without people,
the entropy threshold TH is chosen to be 4.1. The
thermal camera used in the test is an AXIS Q1921-E,
with a resolution of 384×288 pixels and a horizontal
field-of-view of 55
◦
.
4.2 Annotation of Data
Capturing three weeks continuously with 30 fps gives
a total of 54,432,000 frames, which would be nearly
impossible to manually annotate. Therefore it is cho-
sen to manually annotate 54,000 frames, resulting in
30 minutes of video. This will be used for calculat-
ing the precision of the system. But as this test does
only evaluate the system during one specific activity
an additional test will be conducted. A period of 36
consecutive hours will be sampled and manually an-
notated with 0.04 fps (1 frame per 25 seconds). This
is covering two days with different sports activities
and a night. Even though the frame rate here is low
this will still give a good evaluation of the system and
ensure that it is tested with both a varying number of
people and different types of sports. The data from
the full test period of more than three weeks will be
evaluated by random checks against the videos.
4.3 30 Minutes Test
The results for the 30 minutes period are calculated
as a mean number for every five minutes. The auto-
matic results compared to the ground truth (manually
annotated data) are shown in figure 5 with black and
red.
Figure 5: Manual (red) and automatic (black) result for six
five minutes periods, sampled with 30 frames per second,
and automatic results (green) sampled with 0.04 frames per
second.
Calculating the error of the automatic system,
sampled with 30 fps, for each five minutes period
gives an average error of 20.5 %. Comparing the
green line to the black line shows that in 4 out of 6 pe-
riods the automatic results with different sample rates
are nearly the same, while for the last two periods the
difference is about 0.5 person. From this it is con-
cluded that even with a sample rate decreased to 0.04
fps the results will still be reliable.
OCCUPANCY ANALYSIS OF SPORTS ARENAS USING THERMAL IMAGING
281

4.4 Two Days Test
For the 36 hours, sampled with 1 frame per 25 sec-
onds, a mean error is found for every five minutes,
and stated as a mean error for each hour, since the
activities in the arena are typically the same for at
least an hour. This method is used for both the er-
ror measured in persons and per cent. The hours are
then categorised by the maximum number of people,
to investigate the relation between the error and the
number of persons. See the results in table 1.
Table 1: Error categorised by the maximum number of peo-
ple during the hour.
# persons # hours Mean error Mean error (%)
0 12 0.0017 0.17 %
1-2 15 0.0428 7.35 %
7-15 9 0.5100 11.76 %
For the nine hours with maximum 7-15 persons
on the court the error for each hour lies from 4-20
%, with an average of 11.76 % as stated in table 1.
It is clear that the error for detecting empty arenas is
very low, and the error increases with the number of
persons. This will typically be due to occlusions. As
mentioned in section 3.1 the occupancy level should
be categorised to zero, some or many users, which
means that the precise number of people is not critical
for this application.
The 30 minutes test described in section 4.3
showed an error of 20.5 %, which is equivalent to the
maximum error found during this two day test. The
video of 30 minutes had a high activity level and a
highly varying number of people on the court, with
up to 14 people in each frame. Therefore it is also
expected that it should have a higher error than the
average videos.
4.5 Evaluation of Positions
The calculated positions of the persons will be evalu-
ated by visually comparing the manually marked po-
sitions with the automatic found positions. This is
done for the 36 hours sampled with 1 frame per 25
seconds. An example of one hour showing a hand-
ball match can be seen in figure 6. The upper im-
age shows the positions found by the system and the
lower image shows the true position found manually
for the same period. There are found more people
manually than automatic during this hour, resulting in
darker colours in the bottom image, but it is evident
that there is a high correlation between the two im-
ages and the overall picture is the same. Note that the
camera could only see the left half of the court.
(a) (b)
Figure 6: Positions of users during a handball match. Left:
Automatic. Right: Ground truth. Note that there are found
more people manually than automatic, resulting in darker
colours in the bottom image.
As mentioned in section 1 the position should be
used to examine whether the entire court is being used
or only part of it. Therefore the main point in evaluat-
ing the found positions is not to examine the position
of each person, but to ensure that the overall picture of
the occupancy during a booking is correct. This cor-
relation between automatic and manually found posi-
tions is found to be very high for all 36 hours.
4.6 One Week Evaluation
The main objective for this system is to analyse the
use of the sports arenas. Most sports arenas in Den-
mark have a booking system, where the local schools
and sports clubs book their hours in the arena. To
evaluate the use of the arenas the bookings should
be considered. Seven consecutive days in one sports
arena has been chosen, and the use is here measured
as a mean number of persons per hour. The number is
categorised as zero, some or many persons to describe
the level of occupancy. Table 1 showed that the preci-
sion of the system depends on the number of persons,
the error increases when the number increases. As the
error is very low for detecting empty arenas and few
people on the court, the error of the exact number will
not have a visible effect on the categorisation.
Finally the utilisation is compared to the booking
as shown in figure 7. White areas are not booked,
red areas are booked but never used, orange areas are
booked and used by two or less persons in average,
the green area are booked and used by more than two
persons in average while the blue areas are used by
more than two persons, but not booked. During this
test a frame rate of 1 fps has been used.
Figure 7 indicates that during the measured seven
days 21.2 % of the booked hours are not used, while
23.4 % are used by an average of two or less persons,
which either means that the arena has only been used
for a very short period of the hour, or there have been
only one or two people at the court. One hour are
used but not booked, which could also be a problem,
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
282
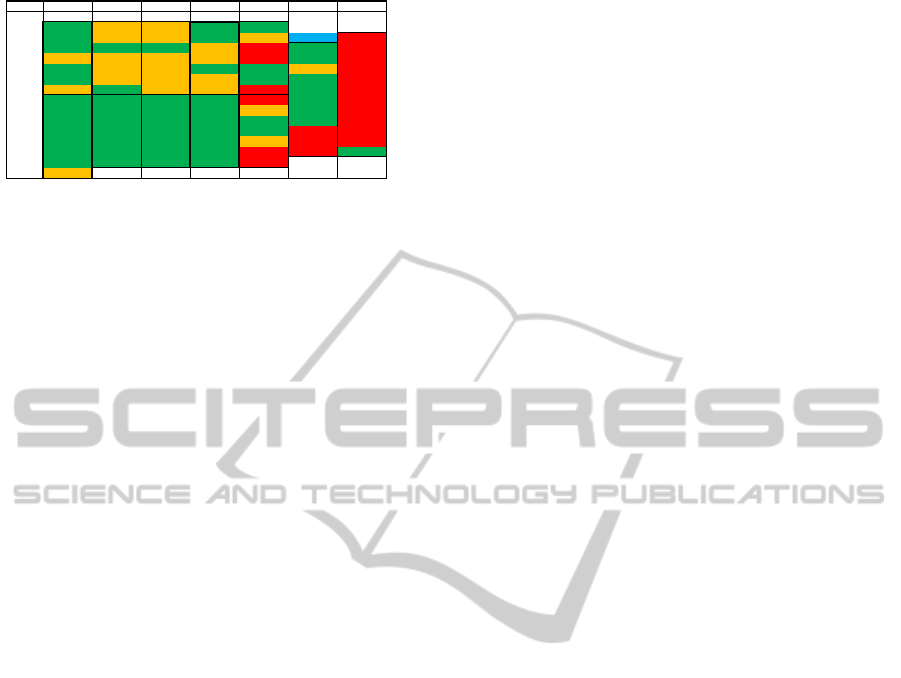
Figure 7: Table of utilisation compared to the booking.
White areas are not booked, red areas are booked but never
used, orange areas are booked and used by two or less per-
sons in average, green areas are booked and used by more
than two persons in average and blue areas are used by more
than two persons, but not booked.
depending on the policy for the administration of the
arena.
5 CONCLUSIONS
This work presented an approach for automatic de-
tection of persons using thermal cameras. For the in-
tended application in sports arenas the privacy issue
is important, therefore a thermal camera is chosen.
The system shows very satisfactory results, with
only a short initialisation it works independently of
the changing conditions in different arenas. The sys-
tem can easily distinguish between an empty arena,
few or many people. The work will continue with
further tests of the system and work on improving the
segmentation of people. This could be by including
temporal information or by using a more detailed hu-
man template for comparison with the found regions.
For future work there are a lot of possibilities for de-
veloping new features, including analysis of the activ-
ity level, activity type and user type.
ACKNOWLEDGEMENTS
We would like to thank Aalborg municipality for sup-
port and for providing access to the sports arenas.
REFERENCES
Bertozzi, M., Broggi, A., Grisleri, P., Graf, T., and Mei-
necke, M. (2003). Pedestrian detection in infrared im-
ages. In Intelligent Vehicles Symposium, 2003. Pro-
ceedings. IEEE, pages 662 – 667.
Brixen, S., Larsen, K. H., Lindholm, J. V., Nielsen, K. F.,
and Riiskjær, S. (2010). Strategi 2015: En Situations-
analyse (Strategy 2015: A Situation Analysis). DGI.
Criminisi, A. (1997). Computing the plane to plane homog-
raphy. Technical report, University of Oxford.
Davis, J. and Sharma, V. (2004). Robust detection of peo-
ple in thermal imagery. In Pattern Recognition, 2004.
ICPR 2004. Proceedings of the 17th International
Conference on, volume 4, pages 713 – 716 Vol.4.
DST, D. S. (2006). Tabel 44: De værnepligtiges
højde (conscripts’ height in 2006).
http://www.dst.dk/aarbogstabel/44.
Kapur, J., Sahoo, P., and Wong, A. (1985). A new method
for gray-level picture thresholding using the entropy
of the histogram. Computer Vision, Graphics, and Im-
age Processing, 29(3):273 – 285.
Ko, T. (2008). A survey on behavior analysis in
video surveillance for homeland security applications.
In Applied Imagery Pattern Recognition Workshop,
2008. AIPR ’08. 37th IEEE, pages 1 –8.
Moeslund, T. B., Hilton, A., Kr
¨
uger, V., and Sigal, L.
(2011). Visual Analysis of Humans - Looking at Peo-
ple. Springer.
Needham, C. J. and Boyle, R. D. (2001). Tracking multi-
ple sports players through occlusion, congestion and
scale. In British Machine Vision Conference, pages
93–102.
Pilgaard, M. (2009). Sport og Motion i Danskernes Hverdag
(Sport and Exercise in the Everyday Life of Danish
People). Idrættens Analyseinstitut.
Saito, H., Inamoto, N., and Iwase, S. (2004). Sports scene
analysis and visualization from multiple-view video.
In Multimedia and Expo, 2004. ICME ’04. 2004 IEEE
International Conference on, volume 2, pages 1395
–1398 Vol.2.
Suzuki, S. and Abe, K. (1985). Topological structural anal-
ysis of digitized binary images by border following.
Computer Vision, Graphics, and Image Processing,
30(1):32 – 46.
Turaga, P., Chellappa, R., Subrahmanian, V., and Udrea, O.
(2008). Machine recognition of human activities: A
survey. Circuits and Systems for Video Technology,
IEEE Transactions on, 18(11):1473 –1488.
Wang, W., Zhang, J., and Shen, C. (2010). Improved human
detection and classification in thermal images. In Im-
age Processing (ICIP), 2010 17th IEEE International
Conference on, pages 2313 –2316.
Wei, W. and Yunxiao, A. (2009). Vision-based human mo-
tion recognition: A survey. In Intelligent Networks
and Intelligent Systems, 2009. ICINIS ’09. Second In-
ternational Conference on, pages 386 –389.
Wong, W. K., Chew, Z. Y., Loo, C. K., and Lim, W. S.
(2010). An effective trespasser detection system us-
ing thermal camera. In Computer Research and De-
velopment, 2010 Second International Conference on,
pages 702 –706.
Wong, W. K., Tan, P. N., Loo, C. K., and Lim, W. S. (2009).
An effective surveillance system using thermal cam-
era. In Signal Acquisition and Processing, 2009. IC-
SAP 2009. International Conference on, pages 13 –17.
Xing, J., Ai, H., Liu, L., and Lao, S. (2011). Multiple
player tracking in sports video: A dual-mode two-way
bayesian inference approach with progressive obser-
vation modeling. Image Processing, IEEE Transac-
tions on, 20(6):1652 –1667.
OCCUPANCY ANALYSIS OF SPORTS ARENAS USING THERMAL IMAGING
283
