
HARDWARE-ACCELERATED WEB VISUALIZATION
OF VECTOR FIELDS
Case Study in Oceanic Currents
Mauricio Aristizabal
1
, John Congote
1,2
, Alvaro Segura
2
, Aitor Moreno
2
, Harbil Arregui
2
and Oscar Ruiz
1
1
CAD/CAM/CAE Laboratory, EAFIT University, Medellin, Colombia
2
Vicomtech Research Center, Donostia - San Sebastian, Spain
Keywords:
Line Integral Convolution, Hierarchical Integration, Flow Visualization, WebGL.
Abstract:
Visualization of vector fields plays an important role in research activities nowadays. Increasing web appli-
cations allow a fast, multi-platform and multi-device access to data. As a result, web applications must be
optimized in order to be performed heterogeneously as well as on high-performance as on low capacity de-
vices. This paper presents a hardware-accelerated scheme for integration-based flow visualization techniques,
based on a hierarchical integration procedure which reduces the computational effort of the algorithm from
linear to logarithmic, compared to serial integration methodologies. The contribution relies on the fact that
the optimization is only implemented using the graphics application programming interface (API), instead of
requiring additional APIs or plug-ins. This is achieved by using images as data storing elements instead of
graphical information matrices. A case study in oceanic currents is implemented.
1 INTRODUCTION
Vector field visualization has an important role in
the automotive and aero-spatial industries, maritime
transport, engineering activities and others. It allows
the detection of particularities of the field such as vor-
texes or eddies in flow fields, but also permits ex-
ploring the entire field behavior, determining stream
paths.
In what regards to WebGL, integration based flow
visualization, such as Line Integral Convolution (LIC)
might not be suitable, since in order to build the
integrals, several computational cycles must be per-
formed, hence, low capacity devices might have per-
formance issues. Therefore optimization procedures
must be applied.
Our contribution is a hardware-accelerated opti-
mization scheme for LIC flow visualization imple-
mented in WebGL. The optimization is based on a
hierarchical integration procedure (Hlawatsch et al.,
2011), which reuses previously calculated informa-
tion in order to build the integrals and therefore
avoids unnecessary calculations. Compared with
other methodologies, our implementation only re-
quires WebGL API to be performed, as it employs im-
ages as data storing elements instead of graphical in-
formation matrices. This images are rendered with
the WebGL API, hence parallel computing perfor-
mance is achieved without additional APIs such as
CUDA or OpenCL.
This paper is organized as follows. Section 2
presents the related work. Section 3 exposes the
methodology of LIC flow visualization and its opti-
mization. Section 4 presents a case of study in oceanic
currents and finally the conclusions of our work are
presented in section 5.
2 LITERATURE REVIEW
A great amount of methodologies to visualize vector
fields (flow fields) has been developed among the last
decades. Geometric-based approaches draw icons on
the screen whose characteristics represent the behav-
ior of the flow (as velocity magnitude, vorticity, etc).
Examples of these methodologies are arrow grids
(Klassen and Harrington, 1991), streamlines (Ken-
wright and Mallinson, 1992) and streaklines (Lane,
1994). However, as these are discrete approaches, the
placement of each object is critical to detect the flow’s
759
Aristizabal M., Congote J., Segura A., Moreno A., Arregui H. and Ruiz O..
HARDWARE-ACCELERATED WEB VISUALIZATION OF VECTOR FIELDS - Case Study in Oceanic Currents.
DOI: 10.5220/0003843707590763
In Proceedings of the International Conference on Computer Graphics Theory and Applications (IVAPP-2012), pages 759-763
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

anomalies (such as vortexes or eddies), and therefore,
data preprocessing is needed to perform an illustra-
tive flow visualization. Reference (McLoughlin et al.,
2010) presents an up-to-date survey on geometric-
based approaches.
On the other hand, texture-based approaches rep-
resent both a more dense and a more accurate visual-
ization, which can easily deal with the flow’s feature
representation as a dense and semi-continuous flow
visualization is produced. A deep survey in the topic
on texture-based flow visualization techniques is pre-
sented by (Laramee et al., 2004).
Reference (Van Wijk, 2002) implements an ani-
mated flow visualization technique in which a noise
image is bended out by the vector field, and then
blended with a number of background images. In
(Van Wijk, 2003) the images are then mapped to a
curved surface, in which the transformed image visu-
alizes the superficial flow.
Line Integral Convolution (LIC), presented by
(Cabral and Leedom, 1993), convolves the associated
texture-pixels (texels) with some noise field (usually a
white noise image) over the trajectory of each texel in
the vector field. This methodology has been extended
to represent animated (Forssell and Cohen, 1995), 3D
(Liu and Moorhead II, 2004) and time varying (Liu
and Moorhead, 2005; Liu and Moorhead II, 2004)
flow fields.
An acceleration scheme for integration-based flow
visualization techniques is presented by (Hlawatsch
et al., 2011). The optimization relies on the fact
that the integral curves (such as LIC) are hierarchi-
cally constructed using previously calculated data,
and, therefore, avoid unnecessary calculations.
Several WebGL implementations of different ap-
plications have been done such as volume rendering,
presented by (Congote et al., 2011) or visualization
of biological data, presented by (Callieri et al., 2010).
However, for the best of our knowledge, no other im-
plementation that regards to LIC flow visualization on
WebGL has been found in the literature or in the Web.
Conclusion of the Literature Review: WebGL im-
plementations allow to perform applications for het-
erogeneous architectures in a wide range of devices
from low-capacity smart phones to high-performance
workstations, without any external requirement of
plug-ins or applets. As a result, optimized applica-
tions must be developed. In response to that, this
work optimizes the visualization of 2D steady vector
fields using images as data storing elements instead
of graphical information matrices. As a consequence,
previously calculated data is reused, avoiding unnec-
essary calculations, and reducing the complexity of
the algorithm to O(logN). Hence, only the graphics
API is required for its implementation, preserving the
multi-platform purpose of the application.
3 METHODOLOGY
This article addresses the optimization of integration-
based flow visualization procedures using only the
graphics API. It starts from a 2D vector field F : X →
R
2
, with X ⊆ R
2
, representing the velocity at each
point inside the field. An image represented as the 2D
matrix M : [1, h
M
] × [1, w
M
] → (R, G, B, A), with h
M
and w
M
representing its height and width respectively
in pixels, and a noise field W : R
2
→ R, both mapping
to F.
The goal is to calculate a 2D matrix I : [1, h
I
] ×
[1, w
I
] → (R, G, B, A) that defines an image, with h
I
and w
I
representing its height and width in pixels.
Each pixel is a four-component vector (R, G, B, A) of
red, green, blue and alpha values (R, G, B, A ∈ [0, 1]).
3.1 Line Integral Convolution
In order to visualize 2D vector field, the procedure
convolves the mapping image M with its noise field W
along the trajectory of each point in the vector field, as
proposed by (Cabral and Leedom, 1993). For this pur-
pose, let us define q as an arbitrary point in the field.
Hence, for its associated finite trajectory c (extracted
from F), with p(s) ∈ c, and s the parameter associated
to c, the resulting image is obtained as follows:
I(q) =
R
c
M(p(s))W (p(s))ds
R
c
W (p(s))ds
(1)
q = p(0)
c
s
s > 0
s < 0
Figure 1: Trajectory of the point p inside F.
Note that q represents the starting point of the tra-
jectory that is going to be convolved (i.e. p(0) = q),
and the trajectory c evaluates the upstream (s > 0) and
downstream (s < 0) directions. This integral is per-
formed for all q ∈ X .
For a computer implementation, a discrete calcu-
lation of the integral is required. As a result, a PL ap-
proximation of c is performed using a first-order ap-
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
760
proximation of the point’s displacement, and the inte-
grals are calculated using an Eulerian-based method.
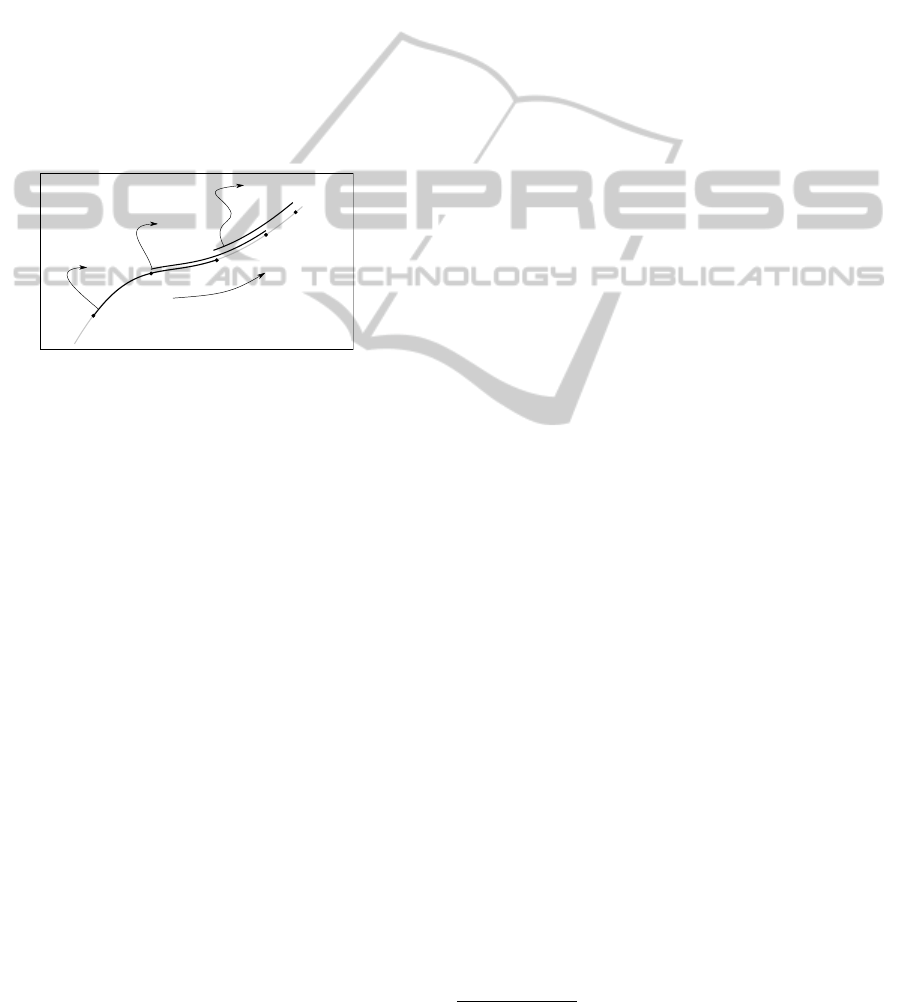
3.2 Hierarchical Integration
Integration over massive point trajectories in n-
dimensional vector fields suffer from unnecessary
step calculations since several points in the field might
lie over the same trajectory and therefore share por-
tions of the integrals (see figure 2). In response to
this, hierarchical integration (Hlawatsch et al., 2011)
only calculates the necessary steps and then itera-
tively grows the integrals reusing the data, reduc-
ing the computational complexity of the algorithm
from O(N), using serial integration methodology, to
O(logN). The procedure is summarized as follows.
s
y=x(0)
x(1)
x(2)
f(x(0))
f(x(1))
f(x(2))
Figure 2: Trajectory overlapping in line integral evaluation.
Let us define some arbitrary line integral f : Y →
R
m
, with Y ⊆ R
n
, bounded by its trajectory c, and its
discrete approximation like described in equation 2.
f (y) =
Z
c
w(x(s))ds ≈
t
∑
i=1
w(x(i))∆s (2)
where t is is the maximum number of steps, repre-
senting the curve length, x(0) = y is the starting point
of the trajectory path. The integration procedure is
performed for all points y ∈ Y in parallel.
For the sake of simplicity assume that ∆s = 1 ,
∀y ∈ Y and therefore f (y) ≈
t
∑
i=1
w(x(i)). The algo-
rithm starts with the calculation of the first integration
step for all the points in the field, this is:
f
0
(y) = w(x(1)) (3)
It is required to store the last evaluated point x(1)
over the growing trajectory and the value of f
1
(y) for
every point in order to reuse them in the following
steps to build the integral. With this, the following is
to update the value of the integral, using the sum of
the previously calculated step at y and the step evalu-
ated at its end point (x(1)), namely,
f
1
(y) = f
0
(x(0)) + f
0
(x(1)) (4)
In this case, the end point of f
1
(x(0)) is x(2) as the
calculation evaluates f
0
(x(1)), and therefore the next
iteration must evaluate f at x(0) and x(2) in order to
grow the integral. In general, the k’th iteration of the
procedure is calculated as
f
k
(y) = f
k−1
(x(0)) + f
k−1
(x(end)) (5)
where ’end’ represents the parameter associated to the
tail point of the trajectory.
3.3 Data Storing
Despite graphics APIs does not allow to transfer data
calculated on shaders (such as matrices, vectors or
single values), between rendering procedures, they
can transfer images. An image is a 2D matrix that
stores at each position a four-component vector that
defines its color, i.e. [1, h]×[1, w] → (R, G, B, A), with
h and w its height and width in pixels respectively. A
pixel color is defined by red, green blue and alpha val-
ues (R, G, B, A ∈ [0, 1]).
As a result, for any field X ∈ R
2
it is possible to
store four values associated to any point p
j
∈ X in an
image that maps to X. Note that pixels are discrete
values and p
j
might be continuous. In this case, av-
erage and interpolation of data are required to both
read and write the values on the image that maps to
the field, and therefore avoid high error between cal-
culations. If more than four values are required to be
stored, it is needed to render (calculate) more than one
image in order to store those values.
4 CASE STUDY
Many data services regards to the measurement of
earth’s information such as wind flow, superficial tem-
perature, ocean salinity and others. For this applica-
tion, the vector field that defines the velocity is re-
quired. The Global Ocean Data Assimilation System
(GODAS)
1
provides this information in a netCDF for-
mat (Hankin et al., 2010), which allows, throughout
servers, to visualize the data as an image informa-
tion. The ocean’s longitudinal and latitudinal com-
ponents of the velocities are gray-scale images. They
represent for a full white color (R = G = B = 1.0) a
velocity component of 3.0 and for a full black color
(R = G = B = 0.0) a velocity component of -3.0.
Taking advantage of massive parallel computing
capabilities and data interpolation of SIMD program-
ming architectures, it is possible to optimize the cal-
culation of the integrals using images. Although
1
http://www.esrl.noaa.gov/psd/
HARDWARE-ACCELERATED WEB VISUALIZATION OF VECTOR FIELDS - Case Study in Oceanic Currents
761

graphic libraries can not return or store previously cal-
culated data as arbitrary matrices, they are capable of
performing render-to-texture operations. This allows
to store a rendered image in GPU’s memory instead
of displaying it, to then access it from another render-
ing procedure and access its information. As a result,
images might be used as data storing elements instead
of graphical information matrices.
Regarding that LIC integrates along both the up-
stream and the downstream directions hierarchical in-
tegration must be implemented separately for each di-
rection and then merged to obtain the final image I.
The mapping image (M) is a gray-scale noise im-
age. Therefore the values of each color components
are the same for each pixel, i.e. R = G = B. The
weight field used is W (q) = 1.0 ∀q ∈ X. In order
to perform LIC with hierarchical integration, for both
directions, one value is needed to store the partial in-
tegral (since M is single-valued), and two values are
required to store the two coordinates that define the
final point of the partially evaluated trajectory. As a
consequence, two images are required to store the val-
ues for each point q in the field. For this purpose let
us define the following convention of data storing in
the next two images in order to store the data:
Image Q : [1, h
Q
] × [1, w
Q
] → (R, G, B, A), is used
to store the data in the upstream direction for each
point q
j
in the field. The first component (where the
red component is stored) is used to store the partially
evaluated convolution and the second and third com-
ponents (green and blue components) store the coor-
dinates of the tail point of the trajectory. The fourth
component is always used as 1.0. Note that since the
weight field is 1.0 for all points in the field, the con-
volution becomes the average of all values of M along
the partially evaluated trajectory. As a result, the up-
date throughout the iterations of the image is calcu-
lated as follows
Q
k
(q
j
) =
Q
k−1
(p(0)).R+Q
k−1
(p(end)).R
2
Q
k−1
(p(end)).G
Q
k−1
(p(end)).B
(6)
As a consequence, the final visualization of the
flow is calculated as the average between the integral
components of images Q and S.
4.1 Data Storage in WebGL
WebGL permits to set up vertex and index buffers,
to change rendering engine state such as active tex-
ture units or transform matrices, and to invoke draw-
ing primitives. It also allows to perform render-to-
texture operations using FBOs, which allow to render
into images instead than displaying the information.
WebGL also incorporates floating-point texture man-
agement as color attachments in FBOs, which enables
to store the rendered images with floating point preci-
sion values, instead of 8-bit integers.
In order to perform render-to-texture operations in
WebGL it is needed to define the necessary FBOs.
Each FBO has an associated texture (image) to which
the rendering code is performed. Additionally, for the
matter of this implementation, it is important to con-
sider that when the rendering procedure of an FBO is
being performed, it does not allow to access the same
memory space (in GPU) to which the rendering oper-
ation will write the information.
As a result, the flow visualization, regarding the
hierarchical integration, requires the twice as FBOs
than the number of rendered images, this is, one FBO
is used to calculate and update the image and the other
is used to copy the resulting image in another place of
memory in order to allow data to be reused for the
next iteration. Hence 4 FBOs are required to perform
LIC flow visualization for this case study.
4.2 Flow Visualization in WebGL
Final results are shown in figure 3. The final LIC
image I is used to determine the brightness of each
point in the field. Color-mapping is determined by
the speed at each point in a warm-cold color-scale.
Figure 3: Visualization of the Pacific and Atlantic oceans
currents using LIC with hierarchical line integration in We-
bGL. Four iterations achieve 32 integration steps and shows
distinguishable streams.
Final results were obtained after 4 hierarchical it-
erations (see figure 3), this is, 16 total integration
steps for both the upstream and downstream direc-
tions, making a detailed visualization with long and
distinguishable trajectories.
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
762

5 CONCLUSIONS AND FUTURE
WORK
This article presents a hardware accelerated LIC flow
visualization in WebGL. The procedure is suitable to
be performed on multi-platform and in low-capacity
devices such as smart phones and tablet computers
since no other API or plug-in is required to perform
the procedure, and the number of iterations that is
usually required is reduced. The procedure is not
only suitable for WebGL implementation but for any
render-to-texture capable parallel graphics implemen-
tation.
It is proposed the development of a human user in-
teraction application for the visualization of oceanic
currents as a subsequent activity to this work. Apart
from this, other topics might be suitable as future
work such as the implementation of this methodology
to visualize 3D vector fields and to other integration-
based visual applications.
ACKNOWLEDGEMENTS
This work was partially supported by the Basque
Government’s ETORTEK Project (ITSASEUSII) re-
search program and CAD/CAM/CAE Laboratory at
EAFIT University and the Colombian Council for
Science and Technology COLCIENCIAS. GODAS
data (ocean velocity information) was provided by the
NOAA/OAR/ESRL PSD, Boulder, Colorado, USA,
from their Web site at http://www.esrl.noaa.gov/psd/,
and ohter information such as earth’s bathymet-
ric, topologic and satellite images, was provided by
the NASA’s Earth Observatory from their web site
http://earthobservatory.nasa.gov/.
REFERENCES
Cabral, B. and Leedom, L. (1993). Imaging vector fields
using line integral convolution. In Proceedings of the
20th annual conference on Computer graphics and in-
teractive techniques, pages 263–270. ACM.
Callieri, M., Andrei, R., Di Benedetto, M., Zopp
`
e, M.,
and Scopigno, R. (2010). Visualization methods for
molecular studies on the web platform. In Proceed-
ings of the 15th International Conference on Web 3D
Technology, pages 117–126. ACM.
Congote, J., Segura, A., Kabongo, L., Moreno, A., Posada,
J., and Ruiz, O. (2011). Interactive visualization of
volumetric data with webgl in real-time. In Proceed-
ings of the 16th International Conference on 3D Web
Technology, pages 137–146. ACM.
Forssell, L. and Cohen, S. (1995). Using line integral
convolution for flow visualization: Curvilinear grids,
variable-speed animation, and unsteady flows. Visu-
alization and Computer Graphics, IEEE Transactions
on, 1(2):133–141.
Hankin, S., Blower, J., Carval, T., Casey, K., Donlon, C.,
Lauret, O., Loubrieu, T., Srinivasan, A., Trinanes,
J., Godoy, O., et al. (2010). Netcdf-cf-opendap:
Standards for ocean data interoperability and object
lessons for community data standards processes. In
Oceanobs 2009, Venice Convention Centre, 21-25
septembre 2009, Venise.
Hlawatsch, M., Sadlo, F., and Weiskopf, D. (2011). Hier-
archical line integration. Visualization and Computer
Graphics, IEEE Transactions on, 99:1–1.
Kenwright, D. and Mallinson, G. (1992). A 3-d stream-
line tracking algorithm using dual stream functions.
In Proceedings of the 3rd conference on Visualiza-
tion’92, pages 62–68. IEEE Computer Society Press.
Klassen, R. and Harrington, S. (1991). Shadowed hedge-
hogs: A technique for visualizing 2d slices of 3d vec-
tor fields. In Proceedings of the 2nd conference on
Visualization’91, pages 148–153. IEEE Computer So-
ciety Press.
Lane, D. (1994). Ufat: a particle tracer for time-dependent
flow fields. In Proceedings of the conference on Visu-
alization’94, pages 257–264. IEEE Computer Society
Press.
Laramee, R. S., Hauser, H., Doleisch, H., Vrolijk, B., Post,
F. H., and Weiskopf, D. (2004). The state of the art
in flow visualization: Dense and texture-based tech-
niques. In Computer Graphics Forum, volume 23,
pages 203–221. Wiley Online Library.
Liu, Z. and Moorhead, R. (2005). Accelerated unsteady
flow line integral convolution. IEEE Transactions
on Visualization and Computer Graphics, pages 113–
125.
Liu, Z. and Moorhead II, R. (2004). Visualizing time-
varying three-dimensional flow fields using acceler-
ated uflic. In The 11th International Symposium on
Flow Visualization, pages 9–12. Citeseer.
McLoughlin, T., Laramee, R. S., Peikert, R., Post, F. H., and
Chen, M. (2010). Over two decades of integration-
based, geometric flow visualization. In Computer
Graphics Forum, volume 29, pages 1807–1829. Wi-
ley Online Library.
Van Wijk, J. (2003). Image based flow visualization for
curved surfaces. In Proceedings of the 14th IEEE Vi-
sualization 2003 (VIS’03), page 17. IEEE Computer
Society.
Van Wijk, J. J. (2002). Image based flow visualization. In
ACM Transactions on Graphics (TOG), volume 21,
pages 745–754. ACM.
HARDWARE-ACCELERATED WEB VISUALIZATION OF VECTOR FIELDS - Case Study in Oceanic Currents
763
