
PASSENGER COUNTING IN PUBLIC RAIL TRANSPORT
Using Head-Shoulder Contour Tracking
Pieterjan De Potter
1
, Philippe Belet
1
, Chris Poppe
1
,
Steven Verstockt
1,2
, Peter Lambert
1
and Rik Van de Walle
1
1
Department of Electronics and Information Systems - Multimedia Lab, Ghent University - IBBT,
Gaston Crommenlaan 8 bus 201, B-9050, Ledeberg-Ghent, Belgium
2
ELIT Lab, University College West Flanders, Ghent University Association,
Graaf Karel de Goedelaan 5, B-8500, Kortrijk, Belgium
Keywords:
Video Analytics, Public Transport, People Counting, Histogram of Oriented Gradients, Kalman Filter.
Abstract:
Automated people counting has multiple applications: referring passengers to vehicles with empty seats, gath-
ering statistical information for railway companies to improve their distribution of vehicles, etc. In this paper,
a people counting algorithm for public transport vehicles is presented. First, head-shoulder contours are de-
tected by adaboost classification of a combination of a histogram of oriented gradients features and a color
histogram. An integral histogram and integral image are used to speed up the extraction of these features.
The results of the classification process are clustered and these clusters are tracked by a Kalman filter using
a custom error covariance matrix. Finally, the path followed by an observed person is evaluated in order to
count passengers entering and exiting the vehicle. Evaluation shows that this approach performs better than
previous approaches, especially in scenarios with occlusions.
1 INTRODUCTION
Over the past decade, the number of installed video
surveillance cameras has grown exponentially be-
cause of the reduced cost and the fact that for some
scenarios security has gained importance over pri-
vacy. This has led to the development of various video
analytic systems to detect different events, mostly
outdoors or in large open spaces.
In public transport as well, video surveillance
cameras are being installed, and video analytic sys-
tems can be used. The primary goal of the installed
cameras is to provide security, but as the cameras are
already installed, they can also be used for other pur-
poses, such as passenger counting. The conditions in
vehicles are however different than in other scenar-
ios (e.g., fast illumination changes, a lot of occlusion,
a moving background through the windows), which
makes modified or new algorithms necessary.
The remainder of this paper is organized as fol-
lows. In Section 2, related work is discussed. Our
system is described in Section 3. In section 4, an eval-
uation of our approach is given. Finally, conclusions
and future work are discussed in Section 5.
2 RELATED WORK
In (Vu et al., 2006), an event recognition system based
on face detection and tracking combined with audio
analysis is presented. Zones of interest and static ob-
jects are used as context information. The focus is on
audio-video based event detection.
High accuracies have been reported counting pas-
sengers using a dedicated setup with vertically di-
rected cameras (Yahiaoui et al., 2008). Since the cam-
eras used for this setup can not be used for other pur-
poses, this solution is more expensive than reusing al-
ready installed video surveillance cameras.
Regarding human and object detection in general,
different feature descriptors have already been pro-
posed. In (Li et al., 2009), people are detected based
on the omega-shape features of their head-shoulder
parts. Viola-Jones classification and AdaBoost classi-
fication using histogram of oriented gradients features
are combined to obtain fast and reliable results. In our
system, parts of this approach are adapted and used.
In previous work, we counted passengers by com-
bining Laplacian edge detection with a median-based
background subtraction technique to detect objects
(De Potter et al., 2010a). Rectangle-shaped regions
705
De Potter P., Belet P., Poppe C., Verstockt S., Lambert P. and Van de Walle R..
PASSENGER COUNTING IN PUBLIC RAIL TRANSPORT - Using Head-Shoulder Contour Tracking.
DOI: 10.5220/0003846207050708
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 705-708
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
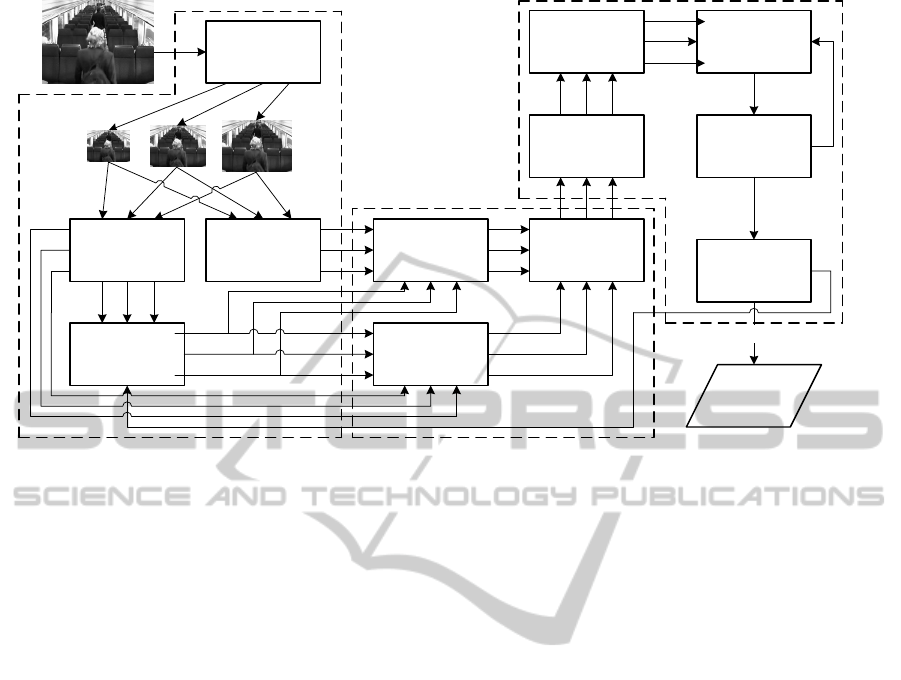
Scaling
Integral histogram of
oriented gradients
Adaboost
classification
Histogram of
oriented gradients
Hierarchical
agglomerative
clustering
Initial confidence Final confidence
Kalman filter
Path evaluation
Number of
passengers
Section 3.3: Tracking & evaluation
Integral image
Foreground
extraction
Color histogram
Section 3.1: Preprocessing Section 3.2: Feature extraction & classification
Figure 1: The general architecture of our system. The input images are first preprocessed, after which features can be extracted
to classify persons. These persons are tracked and their paths are evaluated to obtain a right passenger count.
were defined in the seat regions to detect seating and
leaving actions. Drawbacks were the need for a man-
ual calibration of the seat regions and the need for
a training phase for the used background subtraction
technique. We also compared a Laplacian of Gaussian
edge detector, a non-linear difference of Gaussians
edge detector and a mixture of models background
subtraction technique (De Potter et al., 2010b). The
results of these techniques were used by a bound-
ing box based tracker to count passengers in a vehi-
cle. The main disadvantage is that the bounding box
tracker is based on the detection of blobs: occlusions
in the camera view hinder correct detections.
In this paper, we counter the occlusion problem
by counting people when they are best visible: at the
entrances of each vehicle. Once the classification unit
is well trained, the manual calibration is limited to the
definition of the entry zone.
3 SYSTEM OVERVIEW
Figure 1 gives an overview of our system. Differ-
ent preprocessing steps are described in Section 3.1.
The extraction of the histogram of oriented gradients
(HOG) features and the color histogram, and the clas-
sification of persons is described in Section 3.2. The
persons are tracked and the paths are evaluated to ob-
tain the passenger count, as discussed in Section 3.3.
3.1 Preprocessing
Since HOG features are not scale-invariant, the in-
put images are rescaled to three smaller dimensions to
enable the detection of head-shoulder contours closer
and further away from the camera.
A lot of HOGs will need to be calculated for the
head-shoulder detection. For this reason, an integral
histogram (Porikli, 2005) is used on each scale to
store the magnitude and orientation of the gradients.
At each pixel, the magnitude of the gradient is calcu-
lated for each color channel. Only the color channel
leading to the largest magnitude is used in the further
calculations (Dalal and Triggs, 2005). For this color
channel, the orientation of the gradient is calculated.
Color histograms are used in addition to the HOG
features for classification and also need to be calcu-
lated many times. In order to cope with illumination
variances, a normalized color space is used to con-
struct these histograms. Since the transformation to
this color space uses mean values and standard devi-
ations, an integral image (Viola and Jones, 2004) is
constructed for each K ∈ [R R
2
G G
2
B B
2
]. Using
this integral image, the normalized color histograms
can be calculated much faster.
Classification is the slowest step in our system. In
order to limit the number of partial images for which
the features need to be extracted and classified, the po-
sitions of foreground objects in the input images are
calculated. In order to cope with illumination changes
in the input images, the foreground detection is edge-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
706

based. In addition to these detected foreground re-
gions, regions that are predicted as foreground regions
by the person tracker (see Section 3.3) are indicated as
foreground regions as well.
3.2 Feature Extraction and
Classification
There is a lot of occlusion in vehicles for public trans-
port. In our approach, the parts of the body that are
visible most of the time are used to detect persons: the
head and shoulders. HOG features are used to detect
these head-shoulder contours in 32x32 pixels partial
images (Li et al., 2009). In addition, a normalized
color histogram is calculated per partial image.
The adaboost boosting algorithm (Freund and
Schapire, 1997) is used to create a robust classifier out
of multiple weak classification units. Some results of
the classification are shown in Figure 3.2.
Figure 2: The input image at the largest scale and the results
of the Adaboost classification at all three scales.
3.3 Tracking and Counting
The results of the classification are clustered us-
ing single linked agglomerative clustering (Manning
et al., 2008). This way, the number of clusters does
not need to be known in advance.
For each cluster, the area of the minimal enclos-
ing ellipse and the ratio of the number of actual points
versus holes are taken into account to obtain the ini-
tial confidence in that cluster. The initial confidence
and the centers of the minimal enclosing ellipse of the
different clusters on the different scales are scaled to
the smallest scale. This enables an equal comparison
of clusters over the different scales. For each cluster,
corresponding clusters on all scales are searched and
the maximal initial confidence of these corresponding
clusters is used for further calculations.
The final confidence is represented by an ellipse,
with a smaller ellipse representing a greater confi-
dence. The minimal enclosing ellipse corresponding
to the cluster with the maximal initial confidence is
first rescaled so its area matches a predefined area.
Then it is scaled to represent the number of points
in that cluster, relative to a predefined number of
points. The generalized conjunction / disjunction
function (Dujmovi
´
c, 1996) is used to take other fac-
tors (i.e. the proximity of the centers of the enclos-
ing ellipses on the different scales, the initial confi-
dence, and the proximity of the center the predicted
position by the Kalman filter) into account as well,
resulting in a second scaling factor. The final confi-
dence is obtained after scaling with both scaling fac-
tors. From this ellipse, the corresponding covariance
matrix is retrieved. This covariance matrix is used as
the measurement error covariance matrix in the track-
ing stage.
A Kalman filter (Welch and Bishop, 1995) is used
to track clusters over time. The center of the final
confidence ellipse is used as measured position of the
person; the corresponding covariance matrix is used
as measurement for the prediction error.
During the tracking phase, path information is
collected. This information then evaluated to count
passengers. Following variables are taken into ac-
count during this evaluation: the start- and endpoint
of the path, the total distance over which a person was
tracked and the average confidence during the track-
ing. By taking the total distance and the average con-
fidence into consideration, some paths that result from
false positives in the person classification process can
be eliminated. The evaluation of the start- and end-
point of the path gives an indication of the action (en-
tering/exiting)that has taken place.
4 EVALUATION
We evaluated our system on six acted sequences with
increasing difficulty in terms of occlusion.
In Table 1, the results from our approach de-
scribed in this paper and the results of previous ap-
proaches are listed. In (De Potter et al., 2010b), the
entire carriage is processed by each camera. The re-
sults for this approach are the averages of the results
of both cameras.
As can be seen in Table 1, our new approach deals
better with scenarios where occlusions happen, espe-
cially when persons are exiting the vehicle. Improve-
ments are still possible, mostly in the area of tracking
and track evaluation.
PASSENGER COUNTING IN PUBLIC RAIL TRANSPORT - Using Head-Shoulder Contour Tracking
707
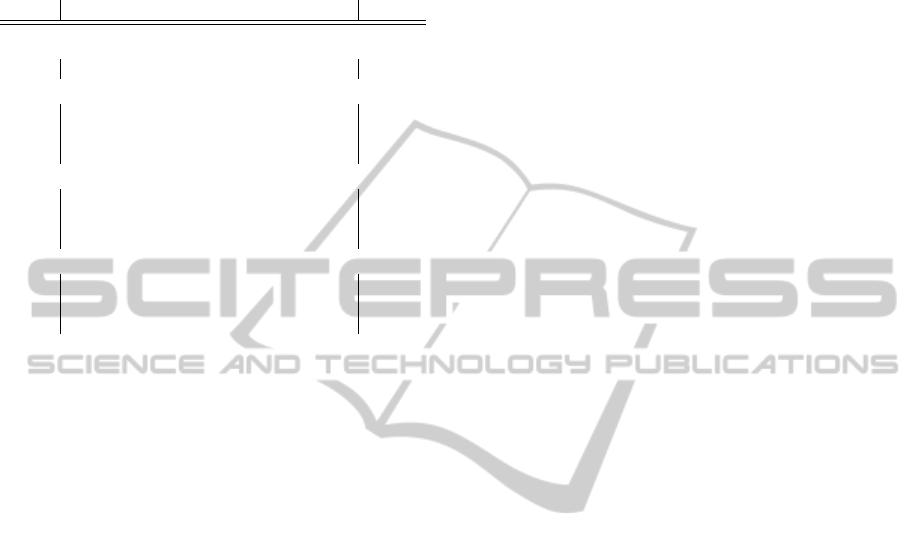
Table 1: Performance evaluation: the number of persons
entering and exiting the vehicle that are counted correctly
(CC), too much (CP) and too less (CM) are listed. Average
values are used for (De Potter et al., 2010b).
Sequence
1 2 3 4 5 6 Total
Ground truth
10 10 10 12 14 14 70
(De Potter et al., 2010a)
CC 5 9 7 6 7 7 40
CP 0 1 4 2 1 0 8
CM 5 1 3 6 7 7 30
(De Potter et al., 2010b)
CC 7 4 2.5 1 0 0 14.5
CP 0 0 0 0 0 0 0
CM 3 6 7.5 11 14 14 55.5
Current system
CC 10 7 9 11 13 11 61
CP 0 0 1 0 1 0 2
CM 0 3 1 1 1 3 9
5 CONCLUSIONS
In this paper, a people counting algorithm for vehicles
in public transport is described. It uses head-shoulder
detection by adaboost classification of histograms of
oriented gradients and color histograms to detect peo-
ple. A Kalman filter is used to track these people, after
which the paths of the observed people are evaluated
in order to count them. The evaluation shows that this
approach works better than previous approaches, es-
pecially in scenarios with occlusions.
Future work consists of evaluating the use of a
particle filter (Isard and Blake, 1998) instead of the
Kalman filter, the use of an attentional cascade (Vi-
ola and Jones, 2004) instead of the adaboost classifier
to decrease the computation time, and the use of face
detection to improve the results for exiting passenger
counting. More test videos need to be recorded to ob-
tain better training sets and to make a more realistic
evaluation possible.
ACKNOWLEDGEMENTS
The research activities as described in this paper were
funded by Ghent University, the Interdisciplinary In-
stitute for Broadband Technology (IBBT), the Insti-
tute for the Promotion of Innovation by Science and
Technology in Flanders (IWT), the Fund for Scien-
tific Research-Flanders (FWO-Flanders), and the Eu-
ropean Union.
REFERENCES
Dalal, N. and Triggs, B. (2005). Histograms of Oriented
Gradients for Human Detection. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 886–893.
De Potter, P., Billiet, C., Poppe, C., Stubbe, B., Ver-
stockt, S., Lambert, P., and Van de Walle, R. (2010a).
Available Seat Counting in Public Rail Transport. In
Progress in Electromagnetics Research Symposium,
pages 1294–1298.
De Potter, P., Kypraios, I., Verstockt, S., Poppe, C., and
Van de Walle, R. (2010b). Automatic Available Seat
Counting In Public Rail Transport Using Wavelets. In
Electronics in Marine, pages 79–83.
Dujmovi
´
c, J. J. (1996). A Method For Evaluation And Se-
lection Of Complex Hardware And Software Systems.
In Computer Measurement Group Conference, pages
368–378.
Freund, Y. and Schapire, R. (1997). A Decision-theoretic
Generalization of On-line Learning and an Applica-
tion to Boosting. Journal of Computer and System
Sciences, 55(1):119–139.
Isard, M. and Blake, A. (1998). CONDENSATION - Con-
ditional density propagation for visual tracking. Inter-
national Journal of Computer Vision, 29(1):5–28.
Li, M., Zhang, Z., Huang, K., and Tan, T. (2009). Rapid
and Robust Human Detection and Tracking Based on
Omega-Shape Features. In IEEE International Con-
ference on Image Processing, pages 2545–2548.
Manning, C. D., Raghavan, P., and Sch
¨
utze, H. (2008). In-
troduction to Information Retrieval, pages 378–382.
Cambridge University Press.
Porikli, F. (2005). Integral Histogram: a Fast Way to Extract
Histograms in Cartesian Spaces. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition vol. 1, pages 829–836.
Viola, P. and Jones, M. (2004). Robust Real-time Face De-
tection. Ineternational Journal of Computer Vision,
57(2):137–154.
Vu, V.-T., Bremond, F., Davini, G., Thonnat, M., Pham, Q.-
C., Allezard, N., Sayd, P., Rouas, J.-L., Ambellouis,
S., and Flancquart, A. (2006). Audio-video Event
Recognition System for Public Transport Security. In
IET Conference on Crime and Security, page 6 pp.
Welch, G. and Bishop, G. (1995). An Introduction to the
Kalman Filter. Technical report, University of North
Carolina at Chapel Hill.
Yahiaoui, T., Meurie, C., Khoudour, L., and Cabestaing, F.
(2008). A people Counting System Based on Dense
and Close Stereovision. In International Conference
on Image and Signal Processing, pages 59–66.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
708
