
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE
SEQUENCES USING PERSPECTIVE COMPOSITION
Siyuan Fang and Neill Campbell
University of Bristol, Bristol, U.K.
Keywords:
Image Generation, Image based Rendering, Visualization.
Abstract:
This paper presents a system for generating multi-perspective panoramas for long scenes from dense image
sequences. Panoramas are created by combining different perspectives, including both original and novel
perspectives. The latter are rendered using our perspective synthesis algorithm, which employs geometrical
information to eliminate the sampling error distortion caused by depth parallax of non-planar scenes. Our
approach for creating multi-perspective panoramas is different from existing methods in that a perspective
composition framework is presented to combine various perspectives to form a panorama without undesired
visual artifacts, through suppressing both colour inconsistencies and structural misalignments among input
perspectives. We show that this perspective composition can facilitate the generation of panoramas from user
specified multi-perspective configurations.
1 INTRODUCTION
A photograph can only capture a portion of long
scenes, such as a street, since the field of view of
a common camera is usually quite limited. With a
single panorama combined from several different im-
ages, users are able to view scenes of interest simul-
taneously. More importantly, a panorama is an effec-
tive way of summarizing content of input images with
much less redundant data.
Traditional panoramas are generated from im-
ages captured at a fixed viewpoint with pure rota-
tional movement (Szeliski and Shum, 1997; Shum
and Szeliski, 2000; Brown and Lowe, 2003). In this
case, input images can be registered to a reference
coordinate based on particular alignment models, of
which the most general one is the homography. How-
ever, it is usually impossible to place the viewpoint
far enough away to encompass the entire street, imag-
ining that we wish to capture a long but narrow street.
Obviously, to acquire more scenes, we have to change
the viewpoint. Generating panoramas from images
captured at different viewpoints is much more chal-
lenging, as in this case, the image registration can-
not be parameterized by an uniform homography if
scenes are not planar.
For non-planar scenes, registering and stitching
images with different viewpoints may cause serious
visual effects, such as ghost artifacts. To alleviate this
problem, these images need to be properly combined,
e.g., divide the overlapping area of multiple images
into different segments, each of which is only ren-
dered with a single image. The seam is optimized
to go through areas that are at a low risk of producing
unnatural visual artifacts. However, with only origi-
nal input images (or perspectives), such an optimized
seam would not exist. In addition, being able to view
a scene from any arbitrary possible perspective of-
fers a great flexibility in allowing users to depict what
they expect to convey in the resultant panorama. This
gives rise to the requirement for synthesizing novel
perspectives from input images.
Our novel perspective synthesis algorithm is based
on the well-known strip mosaic (Peleg et al., 2000;
Zomet et al., 2003), which offers an excellent solution
to synthesize novel views from dense images. How-
ever, since each strip extracted from the input image
is rendered from a regular pinhole camera, the syn-
thesized result usually exhibits a sampling error dis-
tortion, which is visually unacceptable. In our system,
estimated 3D geometrical information is used to elim-
inate this kind of distortion.
The essence of generating multi-perspective
panoramas is to properly combine different perspec-
tives to make the result exhibit a natural appearance.
In this paper, a perspective composition framework
is presented to overcome visual effects brought by
both colour (pixel value) discrepancies and structural
227
Fang S. and Campbell N..
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION.
DOI: 10.5220/0003848702270237
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 227-237
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
picture surface
selection
view interpolation
Novel Perspective Synthesis
structure from motion
user efforts
manual perspective
specification
input images
multi-perspectives
panorama
camera pose and
3D points
Panorama Generation
synthesized perspectives
perspective
composition
perspective
configuration
dense stereo
3D geometrical
information
original perspectives
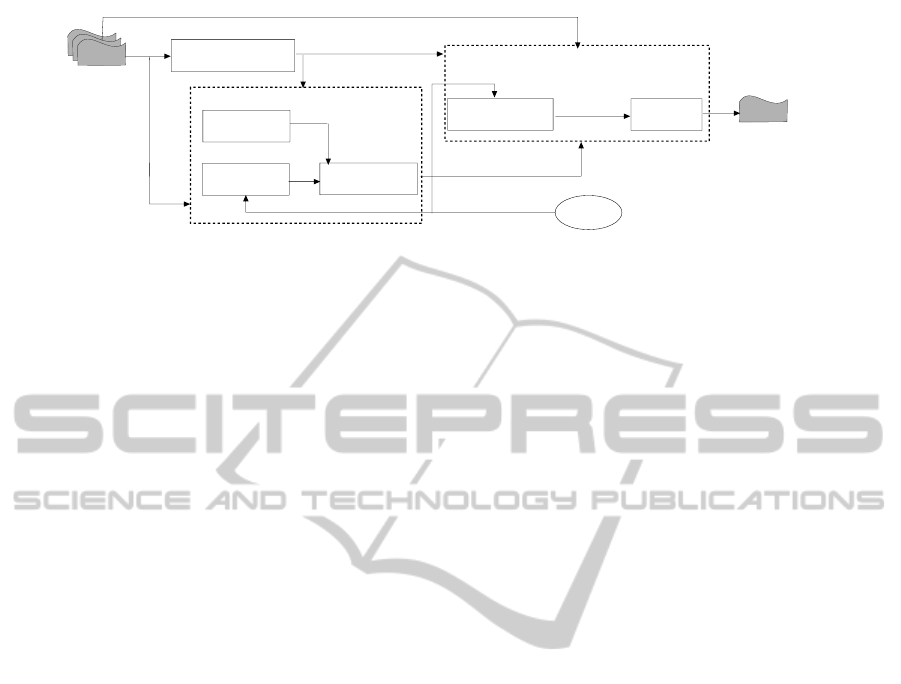
Figure 1: The system framework.
misalignments. The framework consists of two steps:
firstly, parts of various perspectives are selected such
that visual discontinuities among those parts can be
minimized, and then, remaining artifacts are further
suppressed through a fusion process.
An overview of our system is presented in Fig 1.
In our system, street scenes are captured by a video
camera (with a fixed intrinsic camera parameter K)
moving along the scene to capture it looking side-
ways. The camera pose of each input image (i.e.,
the translation vector T, the rotation matrix R and K)
is recovered using our Structure from Motion (SfM)
system, together with a sparse set of reconstructed 3D
scenes points. From recovered camera poses, novel
perspectives are synthesized based on 3D geometri-
cal information estimated using our dense stereo al-
gorithm. An interface for manually specifying the
multi-perspective configuration is provided based on
our perspective composition framework, which com-
bines different perspectives (original or novel) to form
the resultant panorama.
The rest of this paper is organized as follows. Sec-
tion 2 presents background. Section 3 presents our al-
gorithm for synthesizing novel perspectives. Section
4 describes our perspective composition framework.
Results and discussions are presented in Section 5 and
Section 6 concludes this paper.
2 BACKGROUND
The earliest attempt at combining images captured
at different viewpoints is perhaps view interpolation,
which warps pixels from input images to a reference
coordinate using a pre-computed 3D scene geome-
try (Szeliski and Kang, 1995; Kumar et al., 1995;
Zheng and Kang, 2007). There are two main prob-
lems with these approaches: to establish an accurate
correspondence for stereo is still a hard vision prob-
lem, and there will likely be holes in the resultant im-
age due to sampling issues of the forward mapping
and the occlusion problem. Another thread is based
on optimal seam (Shum and Szeliski, 2000; Agarwala
et al., 2006), which stitches input images with their
own perspective and formulates the composition into
a labeling problem, i.e., pixel values are chosen to be
one of the input images. Results are inherently multi-
perspective. However, these approaches only work
well for roughly planar scene, as for scenes with large
depth variations, it is often impossible to find an opti-
mal partition that can create seamless mosaics.
The strip mosaic offers a better alternative. The
basic idea is to cut a thin strip from a dense col-
lection of images and put them together to form a
panorama. In its early form, the push-broom model
(Zheng, 2003; Peleg et al., 2000), the resultant im-
age is parallel in one direction and perspective in
the other, while the crossed-slits (Zomet et al., 2003)
model is perspective in one direction and is perspec-
tive from a different viewpoint in the other direction.
Therefore, the aspect ratio distortion is inherent due
to the different projections along the two directions.
In addition, because scenes within each strip are
rendered from a regular pinhole perspective, given a
certain strip width, there is a depth at which scenes
show no distortion. For a further depth, scenes might
be duplicately rendered, i.e., over-sampled, while for
a closer depth, scenes cannot be fully covered, i.e.,
under-sampled. In the literature, this kind of artifact
is named a sampling error distortion (Zheng, 2003),
see Fig 2.
Unlike the view interpolation and optimal seam,
even for scenes with complex geometrical struc-
tures, strip mosaic can still produce visually accept-
able results in spite of the fore-mentioned aspect ra-
tio and sampling error distortions. Therefore, the
strip mosaic provides a foundation upon which multi-
perspective panoramas in a large scale can be con-
structed. An interactive approach is presented in (Ro-
man et al., 2004), where several perspectives in the
form of vertical slits are specified by users and gaps
in-between them are filled with inverse perspectives.
Some other approaches attempt to automatically de-
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
228
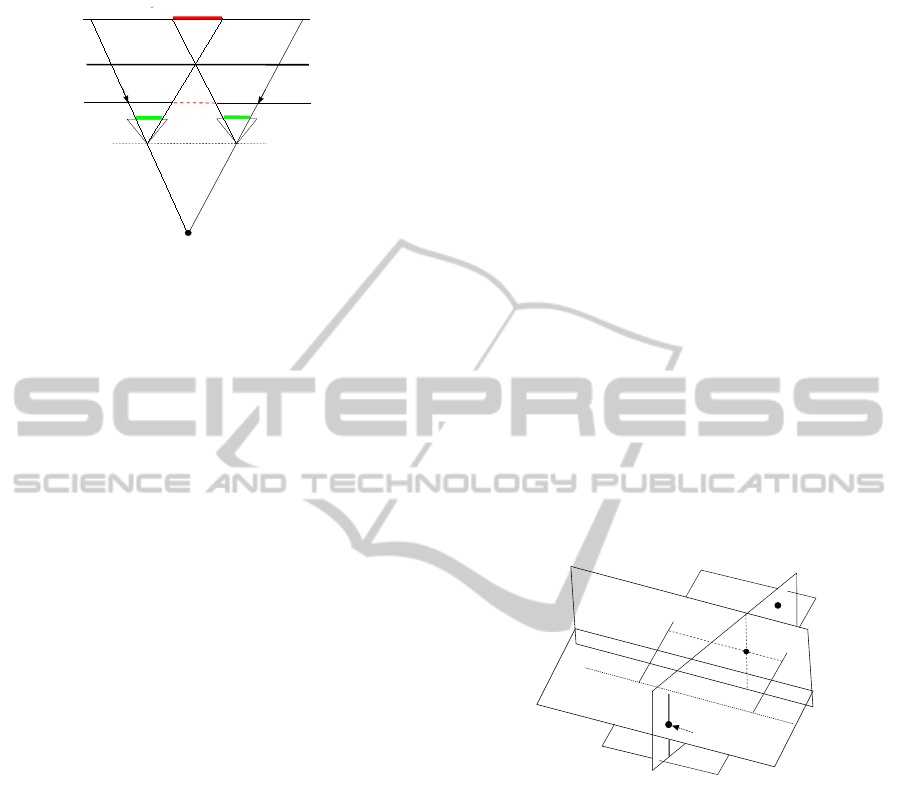
camera trajectory
vertical slit
strip width
strip width
under sampled
over sampled
non-distortion depth
Figure 2: The sampling error distortion is caused by the
depth parallax.
tect the multi-perspective configuration through min-
imizing metrics for measuring undesired effects, e.g.,
the colour discrepancy between consecutive strips
(Wexler and Simakov, 2005) or the aspect ratio dis-
tortion (Roman and Lensch, 2006; Acha et al., 2008)
3 NOVEL PERSPECTIVE
SYNTHESIS
3.1 Single Direction View Interpolation
The novel perspective is rendered onto a 3D picture
surface, which is assumed to be perpendicular to the
ground plane of scenes. A working coordinate system
(WCS) is fitted from camera poses of input sequence
to ensure that the ground plane is spanned by the X
and Z axes, so that the picture surface can be sim-
plified as a line in the top-down view of scenes, and
extruded along the up (Y) axis. Then input images are
rectified according to WCS.
The picture surface is defined by a 3D plane π
f
and the X-Z plane of WCS is denoted as π
c
. If scenes
are exactly located on the picture surface, a point
(or pixel) of the resultant image p
0
= [x
0
,y
0
]
>
can be
mapped to a point p = [x,y]
>
of the i
th
input image by
a projective transformation, i.e., the homography:
"
x
y
1
#
= H
i
"
x
0
y
0
1
#
= K[R
i
| t
i
]G
"
x
0
y
0
1
#
(1)
where G is a 4×3 matrix that establishes the mapping
between a 2D point of the resultant image and a 3D
point X
p
= [X
p
,Y
p
,Z
p
]
>
on the picture surface, such
that:
X
p
Y
p
Z
p
1
= G
x
0
y
0
1
=
s
x
V
x
s
y
V
y
O
0 0 1
x
0
y
0
1
(2)
where V
x
and V
y
are vectors that parameterize X and
Y axes of the plane coordinate of the picture surface
and O is the origin of the plane coordinate. We choose
V
x
and V
y
as projections of the X and Y axes of WCS
onto the picture surface. s
x
and s
y
define the pixel
size along the X and Y axes of the image coordinate.
The choice of pixel size may affect the the rendering
effect, and the strategy for defining a proper pixel size
is presented in Section 3.2.
If scenes do not lie exactly on the picture surface,
instead of using a uniform projective transformation,
a point from the input image should be individually
mapped onto the resultant image based on its actual
3D point X
d
. We assume that the (horizontal) projec-
tion center C
v
of a novel perspective always lies on
plane π
c
and the vertical slit L is the line that passes
through C
v
and perpendicular to π
c
, as shown in Fig 3.
The mapping from a point p = [x, y]
>
in the i
th
image
onto the picture surface is the intersection of 3 planes:
the picture surface π
f
, the plane π
v
that contains X
d
and the vertical slit L and the plane π
h
that contains
X
d
and the X axis of the i
th
camera that is centered at
C
i
, see Fig 3.
picture surface p
f
x-z plane p
c
camera trajectory
p
h
X
d
X
p
v
C
v
L
Figure 3: Points warping based on the 3D geometry.
Once the intersection is recovered, it is mapped to
the resultant image using G
+
, the pseudo-inverse of
G. This approach can be further simplified, since the
Y component of p
0
, i.e., y
0
, can be directly computed
using the homography H
i
. The value of the X com-
ponent x
0
depends on the actual 3D point. Suppose
that the picture surface π
f
intersects π
v
at a 3D line,
and X
s
and X
t
are two points on that 3D line, then we
have:
((G
+
)
2>
X
s
)((G
+
)
3>
X
t
) − ((G
+
)
2>
X
t
)((G
+
)
3>
X
s
)
((G
+
)
3>
X
s
)((G
+
)
1>
X
t
) − ((G
+
)
3>
X
t
)((G
+
)
1>
X
s
)
((G
+
)
1>
X
s
)((G
+
)
2>
X
t
) − ((G
+
)
1>
X
t
)((G
+
)
2>
X
s
)
x
0
y
0
1
= 0 (3)
where (G
+
)
k>
denotes the k
th
row of the matrix G
+
.
With this equation, the value of x
0
can be solved from
the known value of y
0
. Since with one direction the
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION
229
mapping adopts the original projective transforma-
tion, and the other is based on the real 3D geometry,
this rendering strategy is named a “single direction
view interpolation” as opposed to the full perspective
interpolation.
V
x
O
picture surface p
f
x-z plane p
C
camera trajectory
G
v
resultant image
C
C
C
i
i-1
i+1
c'
i-1
c'
i+1
c'
i
L
C
V
y
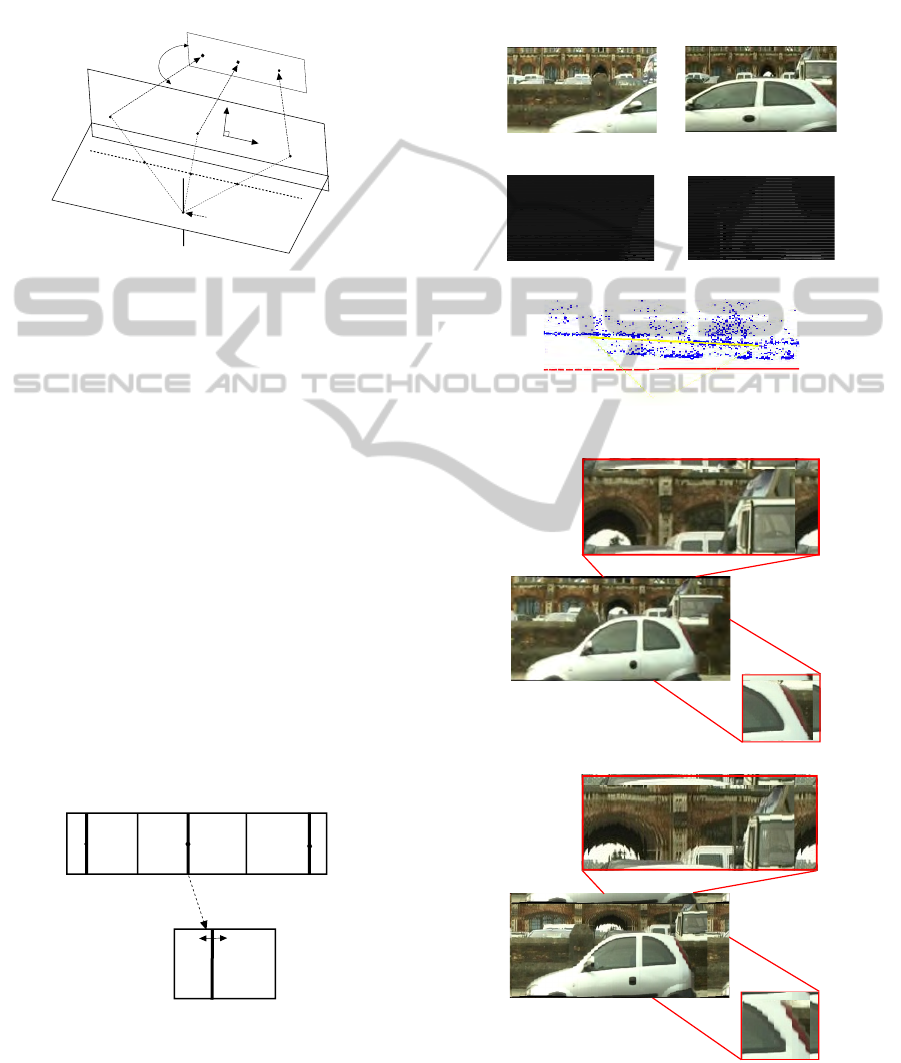
Figure 4: Rendering from a novel perspective. The pro-
jection center of the novel perspective is projected onto the
picture surface and then mapped to the final resultant image.
The point mapping is followed by the determi-
nation of which input image is selected to render a
point in the result. Such selection is inspired by the
the strip mosaic. We project each camera center C
i
onto a point in the resultant image c
0
i
along the line
connecting C
i
and the projection center of the novel
perspective C
v
, see Fig4. We define a vertical center
line CL
i
that passes c
0
i
on the resultant image. A ver-
tical split line BL
i,i+1
is drawn between any consecu-
tive camera center projections. The center line CL
i
is
then mapped to
c
CL
i
in the corresponding input image
I
i
. We only examine pixels within a region around
c
CL
i
. For each row of I
i
, we take the pixel on
c
CL
i
as
the starting point and search on both sides. Once the
warped point onto the result is beyond the split line
BL
i,i+1
or BL
i−1,i
, we proceed to the next row, see
Fig 5.
^
resultant image
I
CL
i-1
BL
i-1,i
c'
CL
i
i-1
c'
i
c'
i+1
CL
BL
i,i+1
CL
i+1
i
i
Figure 5: Center lines and split lines on the resultant im-
age. Pixel warping is carried out within a region around the
center line mapping.
Fig 6(d) shows the result synthesized using our
single direction view interpolation. As compared to
that without the interpolation shown in Fig 6(e), the
sampling error distortion is removed. However, the
aspect ratio distortion still exists. For example, in Fig
6(d), the car in front of the middle low wall is appar-
ently squashed.
(a) Input images.
(b) Depth maps.
(c) The novel perspective configura-
tion.
(d) Synthesized image with the interpolation.
(e) Synthesized image without the interpola-
tion.
Figure 6: A result of the novel perspective synthesis.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
230

3.2 Rendering from Point Samples
Each projected point from an input image provides a
sample, and to render the resultant image is equivalent
to reconstructing a continuous function from these
scattered samples. This is done by convolving sam-
ples with a Gaussian filter. Then, a question naturally
arises as to what size of the pixel of the resultant im-
age is. The pixel size of the input image along the X
(horizontal) direction is known, i.e., s
0
x
. We compute
the average distance d
ave
of the picture surface devi-
ating from the camera trajectory. For simplicity, we
assume that the projection of the picture surface is a
straight line segment. In this case, the pixel size is
defined as:
s
x
=
d
ave
f
s
0
x
(4)
where f is the focal length. The aspect ratio is chosen
as that of the input image, so the pixel size along the
Y (vertical) direction is: s
y
= αs
x
.
Unlike this uniform sampling strategy, another
choice is to use a non-uniform sampling, where the
pixel size varies according to the distance of the
picture surface deviating from the camera trajectory.
Given a point p on the picture surface, suppose that
the corresponding distance deviating from the camera
trajectory is represented by a function d(p), then the
pixel size at p is written as:
s
x
=
d(p)
f
s
0
x
(5)
The result shown in Fig 6 is rendered using the non-
uniform sampling strategy. Fig 7 compares results
rendered using uniform and non-uniform sampling
strategy.
Figure 7: Results of the non-uniform and uniform sampling
strategy. The result of the non-uniform sampling (middle),
and that of uniform sampling (bottom). The uniform sam-
pling strategy is aware of the shape of the picture surface,
while the result of the non-uniform sampling strategy more
agrees with human perception.
3.3 Dense Stereo
To estimate the depth (or, 3D geometry) map for each
point (pixel) in an image I
i
, a stereo process is per-
formed to I
i
and its neighboring image I
i+1
. The
stereo is accomplished in two steps: firstly, a corre-
spondence between I
i
and I
i+1
is detected, and then
the depth map is computed from the correspondence
together with camera poses of I
i
and I
i+1
.
To construct the correspondence, we adopt the
concept of the surface correspondence as suggested
in (Birchfield and Tomasi, 1999). A surface can be
parameterized by the motion of its projections on I
i
and I
i+1
, such that: p + S(p) = p
0
. In this sense, the
correspondence detection is converted to determining
for each point p in I
i
which surface it should belong
to, and to calculating the motion parameter of that sur-
face. Since the stereo pair is assumed to be rectified
and the vertical movement is ignorable, the surface is
represented by a 1D affine model:
S(p) =
a
1
∗ x + a
2
∗ y + b
0
(6)
We adopt a similar framework to that proposed in
(Birchfield and Tomasi, 1999). The basic idea is to it-
eratively refine the estimation by alternating between
two steps:
1. Given a labeled map of each point, we need to
find the affine motion parameter for each con-
nected segment. This is done by minimizing the
cost function
∑
p∈Ω
(I
i
(p) − I
i+1
(p + S(p)))
2
, where
Ω denotes the set of all points in a segment. This
cost function is minimized using the the iterative
method proposed in (Shi and Tomasi, 1994).
2. Given a set of surfaces characterized by their
affine motion parameters, each pixel is labeled as
belonging to one surface. The problem is solved
by a Markov Random Field (MRF) optimization
implemented using the Graph Cut algorithm (Kol-
mogorov and Zabih, 2004). The cost function of
the MRF consists of a data term that computes the
cost for a pixel p to be assigned with a surface
S(p), and a smooth term penalizing a pixel p and
its neighboring point q for having different sur-
face labels.
Fig 6(b) presents an example result of our dense
stereo algorithm.
4 PERSPECTIVE COMPOSITION
Our perspective composition framework consists of
two steps. Firstly, a decision must be made for each
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION
231

pixel of the resultant panorama as to which perspec-
tive should be adopted. Significant pixel value dif-
ferences, and complex structures together with large
geometrical misalignments could make this labeling
process challenging and hence a sophisticated cost
function is proposed to take into account these vi-
tal factors. Visible discontinuities might still ex-
ist, which mainly occur along lines bordering adja-
cent segments rendered from different perspectives.
Therefore, in the second step, we suppress such dis-
continuities through blending information along these
boundary lines.
4.1 Perspective Selection
Given n perspectives: {V
i
}
n−1
0
, for each point p of
the resultant panorama, the perspectives selection is
represented by a labeling function: L(p) = i. Labels
of all points constitute a labeling configuration: L,
the cost of which is formulated as a Markov Random
Field (MRF):
E(L) =
∑
p
E
D
(p,L(p)) +
∑
p
∑
q∈N (p)
E
S
(p,q, L(p),L(q))
(7)
E
S
denotes the smooth term and E
D
denotes the data
term.
The smooth term E
S
consists of three terms: a
depth term, a colour term and a structure term, and the
measuring function is a weighted sum of these three
terms:
E
S
(p,q,L(p),L(q)) = E
d S
+ µ
0
E
c S
+ µ
1
E
g S
(8)
µ
0
and µ
1
are weights.
Depth Smooth Term: The depth smooth term en-
courages the seam to go through regions where 3D
geometry coincides with the picture surface. We cal-
culate for each pixel of a perspective the residual er-
ror with respect to the picture surface. Each point
mapped from the input image onto the synthesized
image of a perspective constitutes a point sample.
Suppose that the point sample is extracted from the
input image I
i
, and let us denote the depth under the
camera coordinate of I
i
as d
I
i
(x). Then, we calculate
the depth of the corresponding point projected onto
the picture surface, denoted as d
I
i
(x
0
). The residual
error of the point sample is:
r
I
i
(x
0
) =
1.0 −
d
I
i
(x)
d
I
i
(x
0
)
d
I
i
(x
0
) ≥ d
I
i
(x)
1.0 −
d
I
i
(x
0
)
d
I
i
(x)
d
I
i
(x
0
) < d
I
i
(x)
(9)
The residual error of a grid point r
V
i
(p) of the i
th
perspective is computed by convolving these samples
with the Gaussian filter. Given a pair of neighbor-
ing pixels p and q of the resultant panorama, with as-
signed labels as L(p) and L(q), the depth smooth term
is:
E
d S
= r
V
L(p)
(p) + r
V
L(q)
(p
+r
V
L(p)
(q) + r
V
L(q)
(q)
(10)
Colour Smooth Term: To place the seam in re-
gions where pixel values from different perspectives
are similar, the colour smooth term is defined as:
E
c S
=
1
N
∑
x∈W
| V
L(p)
(p + x) −V
L(q)
(p + x) |
+
1
N
∑
x∈W
| V
L(p)
(q + x) −V
L(q)
(q + x) |
(11)
where W is a window for the aggregation of differ-
ence, and N is the size of W.
Structural Smooth Term: To suppress structural
discontinuities, we define the structural smooth term
as (assuming the gradient ∇
·
captures the most struc-
tural information of an image):
E
g S
= | ∇V
L(p)
(p) − ∇V
L(q)
(p) |
+ | ∇V
L(p)
(q) − ∇V
L(q)
(q) |
(12)
The Data Term: A general form of the data term is
written as:
E
D
(p,L(p)) =
U
L(p)
(p) p ∈ V
L(p)
∞ p /∈ V
L(p)
(13)
U
L(p)
(p) measures the fitness of a pixel to be assigned
with the label. We adopt a simple solution, i.e., use a
uniform function such that: U
L(p)
(p) ≡ 0.
4.2 Perspective Fusion
Discontinuities along the seam (or boundary line) be-
tween two segments rendered from different perspec-
tives need to be eliminated to produce a natural tran-
sition from one perspective to another, whilst, in the
meantime, we need to preserve original appearance as
much as possible. Here, we adopt a local method, i.e.,
information of one segment along the boundary line
is blended into the interior of the other one. Such in-
formation could simply be pixel values, and warping
vectors compensating for structural misalignments.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
232

W
W
W
W
0
1
2
3
(a) Segments after the
pixel selection.
W
1
Self-Closure Boundary Line
Adjoinning Boundary Line
(b) Boundary fusion of
Ω
1
.
W
2
(c) Boundary fusion of
Ω
2
.
W
3
(d) Boundary fusion of
Ω
3
.
Figure 8: The boundary fusion in a monotonic order. The
order of involved perspectives is: L(0) < L(3) < L(1) =
L(2).
4.2.1 The Fusion Paradigm
Segments of each input perspective are extracted from
the result of the perspective selection. Let us assume
that there are m such segments, and for each seg-
ment k ∈ {0,..., m − 1}, the mapping function L(k)
denotes the index of the corresponding perspective i,
i ∈ {0,..., n − 1}. A segment Ω
k
is enclosed by its
boundary lines ∂Ω
k
. There are two kinds of boundary
lines: 1) adjoining boundary lines that are adjacent
to other segments, and 2) self-closure boundary lines
that do not border with any other segments, see Fig 8.
As for the former, information from other segments
need to be blended into the interior part of Ω
k
, whilst,
for the latter, we only consider information from Ω
k
itself.
We propose a monotonic fusion paradigm that
only performs the boundary fusion in a single direc-
tion. Let us suppose that two neighboring segments
Ω
j
and Ω
k
share a adjoining boundary line. With-
out losing generality, it is assumed that L( j) < L(k).
Information from Ω
j
along the boundary line are
blended into the interior part of Ω
k
, while, Ω
j
remains
unchanged. Fig 8 illustrates this monotonic fusion.
A proper order of input perspectives is needed.
We compute for each perspective the number of its
neighboring perspectives N(i), and then sort all input
perspectives with an ascending order of N(i). If two
perspectives have the same value of N(i), then the one
with more pixel number is placed before the other.
4.2.2 Blending of Pixel Values
To smoothly propagate pixel values of boundary lines,
the blending is constrained by the gradient field of Ω
k
as suggested in (P
´
erez et al., 2003). Let the function
f (·) be the original pixel value at a certain pixel and
f
0
(·) denote the pixel value to be speculated in Ω
k
. In
addition, the function f
?
(·) denotes the pixel value at
the boundary line. The pixel value blending is casted
into a minimization problem, such that:
min
f
0
RR
p∈Ω
k
| ∇ f
0
(p) − ∇ f (p) |
2
with f
0
(p) = f
?
(p) for p ∈ ∂Ω
k
(14)
According to the Euler-Lagrange theorem for
quadratic functions, such minimization can be con-
verted to a group of equations: ∆ f
0
(p) = div f (p) for
all p ∈ Ω
k
with f
0
(p) = f
?
(p) for p ∈ ∂Ω
k
, where
∆
·
denotes the second-order derivative and div f (·) is
the divergence. The second-order derivative can be
discretized using the Laplacian operator, yielding a
linear equation system, which is solved by our imple-
mentation of the multi-grid V-cycle algorithm special-
ized for irregular shaped segments.
4.2.3 Blending of Image Warping
Misalignments can be roughly grouped into two cat-
egories: a small structural misalignment, which is
usually brought by breaking edges along the adjoin-
ing boundary line, and a large structural misalign-
ment, which is mainly caused by significant geomet-
rical misalignments. Fig 9(a) and 10(a) presents real
examples of these two types of misalignments. We
introduce two corresponding algorithms based on im-
age warping. Our system enables these two optional
algorithms to be selected by users for a given adjoin-
ing boundary line.
Structure Re-alignment. It is a common practice
to compensate for small structural misalignments
through locally re-aligning deviated edges, e.g., (Fang
and Hart, 2004; Jia and Tang, 2008). In the following,
this strategy is termed as “structure re-alignment”.
For each input perspective, we detect salient edges
with sufficiently large magnitudes. Given two neigh-
boring segments Ω
j
and Ω
k
, it is assumed that L(j) <
L(k), and hence the boundary information from Ω
j
is
blended into Ω
k
. We match edges striding over the ad-
joining boundary line bordering these two segments.
We enforce a one-to-one mapping that minimizes the
sum of edge difference measuring three factors: the
edge direction similarity, geometrical distance and
pixel value similarity. For a pair of matched edges,
we calculate the backward warping vector. Then we
interpolate warping vectors for those non-edge points
on the adjoining boundary line between Ω
j
and Ω
k
.
Warping vectors are blended into the interior of Ω
k
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION
233

(a) A small structural
misalignment.
(b) After the structure
re-alignment.
Figure 9: A result of the structure re-alignment. In (a),
edges are broken by the seam. After the structure re-
alignment (b), edges are correctly aligned, and thus the
structural discontinuity is eliminated.
using the Poisson image editing (P
´
erez et al., 2003):
min
z
0
RR
p∈Ω
k
| ∇z
0
(p) |
2
and for p ∈ ∂Ω
k
: z
0
(p) = z
?
(p),
where z
0
(p) denotes the warping vector to be spec-
ulated in Ω
k
and z
?
(p) is warping vector from the
boundary line.
Once the warping vector is calculated for each
pixel in Ω
k
, its pixel value of the warped image is
determined using bilinear interpolation. If there still
exists a large pixel value difference, we warp the gra-
dient field of Ω
k
, and then, pixel value blending pre-
sented in the previous section is applied to the warped
gradient field.
Segment Shift. To fix the large structural misalign-
ment caused by the geometrical misalignment, the im-
age warping is based on a robust match between cor-
responding perspectives of the two adjacent segments.
The matching process is constrained by the geometri-
cal information. Firstly, a match region R is placed to
enclose the adjoining boundary line in V
L(k)
, and for
each pixel p in R, its corresponding depth informa-
tion is calculated from point samples for constructing
the perspective V
L(k)
through convolving such samples
with a Gaussian filter, and then it is re-projected onto
the perspective V
L( j)
as p
0
. The similarity between
p and p
0
is measured. The measurement is applied
to a patch centered at p (and p
0
) to allow for an off-
set. The one with the highest similarity degree is cho-
sen as the measuring result, and if it is above certain
threshold, then these two pixels are regarded as a cor-
rect match. A robust measuring function could be the
Normalized Cross-Correlation (NCC) performed over
a small window around a pixel. We also integrate into
our system the SIFT feature (Lowe, 2004), which is
reliable but sometimes too sparse.
Two matched pixels provide a backward warping
vector. For those pixels in R without robust matches,
(a) A large structural
misalignment.
(b) After the segment
shift.
Figure 10: A result of the segment shift. Due to the ge-
ometrical misalignment, a duplicate gutter is shown in (a),
after the segment shift, the ghost gutter is eliminated.
their warping vectors are estimated using known data.
In our system, we integrate two methods. If pixels
with known warping vectors are dense, a convolution
with a Gaussian filter is applied. On the other hand, if
such pixels are sparse (e.g., extracted from SIFT fea-
ture matching), a Radial Basis Function (RBF)-based
interpolation with thin-plate spline kernal (Wahba,
1990) is adopted.
Now, a warping vector is associated with each
pixel on the adjoining boundary between Ω
j
and Ω
k
.
These warping vectors are then blended into the in-
terior of Ω
k
using the poisson image editing as de-
scribed above. This strategy often induces a large
image deformation, which would cause parts of one
segments shifted towards the other, and therefore we
name it as “segment shift”.
5 RESULTS AND DISCUSSION
Experiments have been conducted on real urban
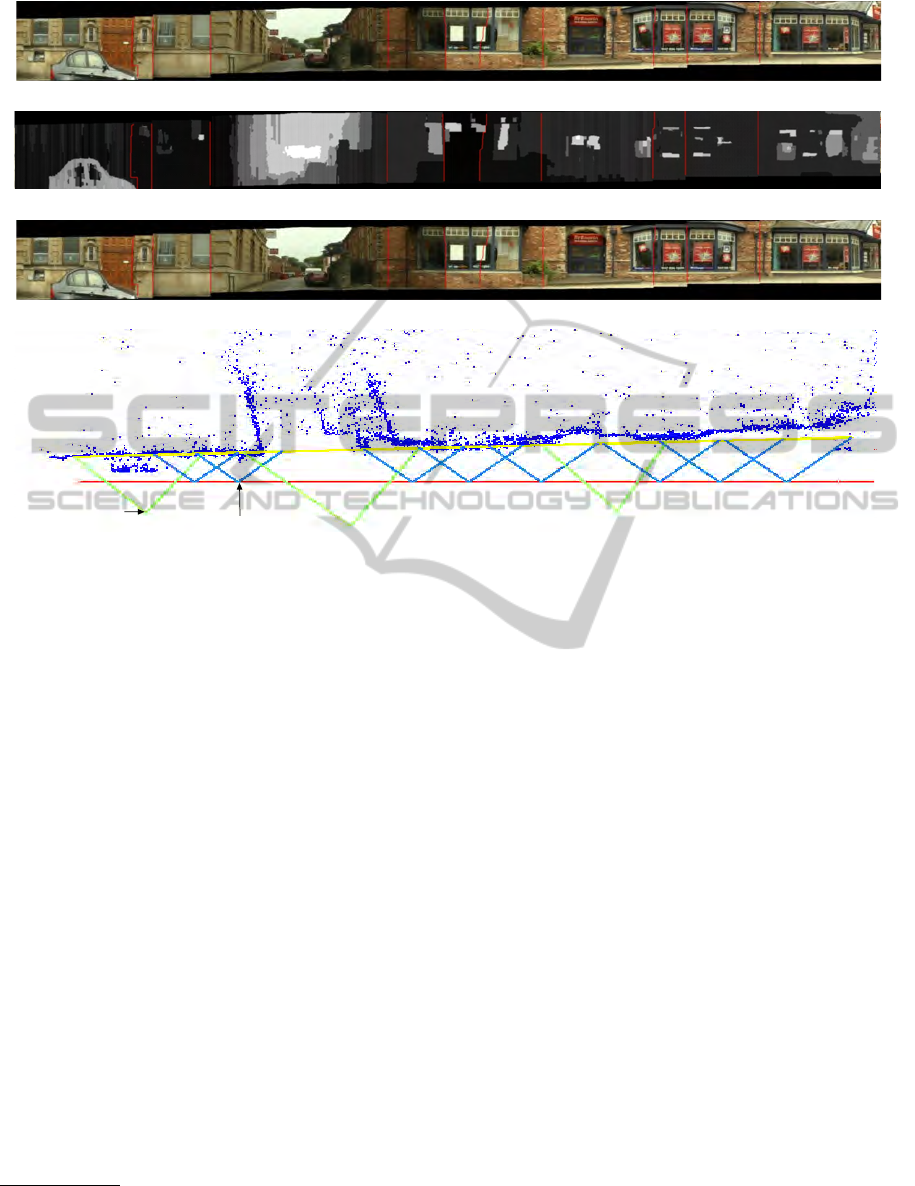
scenes. We demonstrate in Fig 11 how the perspective
composition can be used to create a multi-perspective
panorama from a manually specified perspective con-
figuration. The perspective configuration is shown
in Fig 11(d), which is mixed with both novel and
original perspectives. The original perspective is ren-
dered through mapping the corresponding input im-
age onto the picture surface using a projective trans-
form as defined in 1. The novel perspective is syn-
thesized using our single direction view interpolation.
Fig 11(a) shows the result of the MRF optimization
for the perspective selection, where adjoining bound-
ary lines (seams) are highlighted. Fig 11(b) shows
the map of residual error with respect to the picture
surface, from which one can see that seams produced
by the MRF optimization are roughly placed in areas
with low residual errors. Fig 11(c) presents the final
panorama after the boundary fusion. More results are
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
234
(a)
(b)
(c)
novel perspective
original perspective
(d)
Figure 11: A Panorama created from the perspective composition. In the multi-perspective configuration (d), original per-
spectives are denoted as blue and novel ones are denoted as green. The result of MRF optimization is shown in (a) and the
composed residual error map is shown in (b). The final panorama after boundary fusion is shown in (c).
shown in Fig 12. (Parts of fusion results are already
shown in Fig 9(b) and 10(b)).
We are not the first to generate multi-perspective
panoramas through perspective composition. The ap-
proach presented in (Agarwala et al., 2006) takes orig-
inal perspectives as input, and use the MRF optimiza-
tion to select a perspective for rendering each pixel
in the resultant panorama. This approach works quite
well for mainly planar scenes. However, due to the
lack of facility to synthesize novel perspectives that
are wide enough to cover scenes not on the main plane
(picture surface), a seam placed at the area corre-
sponding to the off-plane scenes would induce serious
visual artifacts. Fig 13 presents an example result of
this approach, which is visually unacceptable
1
.
There are several existing approaches that address
the problem using synthesized novel perspectives.
However, they assume that input perspectives are pre-
cisely registered with each other, and therefore no fur-
ther composition processing is required in their sys-
tem. For example, the interactive approach described
in (Roman et al., 2004) only allows a set of disjoint
1
Actually, they use a fish-eye camera to expand the filed
of view (FOV) of input images. However, the FOV of an
image is still limited.
perspectives to be specified, and these disjoint per-
spectives are simply connected by a set of inverse per-
spectives in between them. Obviously, their approach
restricts content that can be conveyed in the resultant
panorama, e.g., the perspective configuration as pre-
sented in Fig 11(d) can never be achieved with their
approach.
6 CONCLUSIONS
This paper presents a system for producing multi-
perspective panoramas from dense video sequences.
Our system uses estimated 3D geometrical informa-
tion to eliminate the sampling error distortion in the
synthesized novel perspective. Then a perspective
composition framework is presented to combine dif-
ferent perspectives by suppressing their pixel value
and structural discrepancy. Compared to the exist-
ing methods, the perspective composition not only re-
moves noticeable artifacts, but also relieves some con-
straints imposed on the perspective configuration that
a resultant panorama can be properly generated from.
The main problem of our approach is the aspect
ratio distortion associated with the synthesized novel
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION
235

(a) (b)
(c)
Figure 12: Multi-perspective panoramas of urban scenes. For each result, the outcome of the MRF optimization (top) is
blended using our boundary fusion algorithm (middle).
Figure 13: A Panorama created from pure original perspec-
tives (Agarwala et al., 2006). Input image sequence is re-
sampled to get a set of sparse original perspectives, which
are combined using the MRF optimization. For scenes off
picture surface, visual artifacts are noticeable.
perspective. The cause of this problem lies in the fact
that we are lack of information along the direction
perpendicular to the direction of the camera move-
ment. In the future, we shall look into the use of an
array of cameras mounted on a pole to collect enough
information along the direction perpendicular to the
camera movement. Another interesting extension is
to introduce into our system some kinds of interac-
tive viewing facility, so that users can choose to view
scenes of interest at a high resolution or from a partic-
ular perspective such as the Street Slide system (Kopf
et al., 2010).
REFERENCES
Acha, A., Eagel, G., and Peleg, S. (2008). Minimal Aspect
Distortion (MAD) mosaicing of long scenes. Interna-
tional Journal of Computer Vision, 78(2-3):187–206.
Agarwala, A., Agrawala, M., Cohen, M., Salesin, D., and
Szeliski, R. (2006). Photographing long scenes with
multi-viewpoint panoramas. ACM Transactions on
Graphics, 25(3):853 – 861.
Birchfield, S. and Tomasi, C. (1999). Multiway cut for
stereo and motion with slanted surfaces. In Proceed-
ings of the International Conference on Computer Vi-
sion, pages 489–495.
Brown, M. and Lowe, D. G. (2003). Recognising panora-
mas. In Proceedings of IEEE International Confer-
ence on Computer Vision, volume 2, pages 1218–
1225.
Fang, H. and Hart, J. C. (2004). Textureshop: texture syn-
thesis as a photograph editing tool. In Proceedings of
SIGGRAPH, volume 23, pages 354–359.
Jia, J. and Tang, C.-K. (2008). Image stitching using struc-
ture deformation. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence, 30(4):617–631.
Kolmogorov, V. and Zabih, R. (2004). What energy func-
tions can be minimized via graph cuts. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
26(2):147–159.
Kopf, J., Chen, B., Szeliski, R., and Cohen, M. (2010).
Street slide: Browsing street level imagery. ACM
Transactions on Graphics, 29(4):96:1–96:8.
Kumar, R., Anandan, P., Irani, M., Bergen, J., and Hanna,
K. (1995). Representation of scenes from collections
of images. In Proceedings of IEEE Workshop on Rep-
resentation of Visual Scenes, pages 10–17.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
236

Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Peleg, S., Rousso, B., Rav-Acha, A., and Zomet, A. (2000).
Mosaicing on adaptive manifold. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
22(10):1144–1154.
P
´
erez, P., Gangnet, M., and Blake, A. (2003). Poisson
image editing. In Proceedings of SIGGRAPH, vol-
ume 22, pages 313–318.
Roman, A., Garg, G., and Levoy, M. (2004). Interactive
design of multi-perspective images for visualizing ur-
ban landscapes. In Proceedings of IEEE Visualization,
pages 537–544.
Roman, A. and Lensch, H. (2006). Automatic multiperspec-
tive images. In Proceedings of Eurographics Sympo-
sium on Rendering, pages 161–171.
Shi, J. and Tomasi, C. (1994). Good features to track.
In Proceedings of the IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
pages 593–600.
Shum, H. and Szeliski, R. (2000). Construction of
panoramic image mosaics with global and local align-
ment. International Journal of Computer Vision,
36(2):101–130.
Szeliski, R. and Kang, S. (1995). Direct methods for visual
scene reconstruction. In Proceedings of IEEE Work-
shop on Representation of Visual Scenes, pages 26–
33.
Szeliski, R. and Shum, H. (1997). Creating full view
panoramic image mosaics and environment maps.
Journal of Computer Graphics, 31:251–258.
Wahba, G. (1990). Spline Models for Observational Data.
SIAM.
Wexler, Y. and Simakov, D. (2005). Space-time scene man-
ifolds. In Proceedings of the International Conference
on Computer Vision, volume 1, pages 858 – 863.
Zheng, J. (2003). Digital route panoramas. IEEE Multime-
dia, 10(3):57– 67.
Zheng, K. C. and Kang, S. B. (2007). Layered depth panora-
mas. In Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8.
Zomet, A., Feldman, D., Peleg, S., and Weinshall, D.
(2003). Mosaicing new views: The crossed-slits pro-
jection. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 25(6):741– 754.
VISUALIZATION OF LONG SCENES FROM DENSE IMAGE SEQUENCES USING PERSPECTIVE COMPOSITION
237
