
AN URBAN ONTOLOGY TO GENERATE COLLABORATIVE
VIRTUAL ENVIRONMENTS FOR MUNICIPAL PLANNING
AND MANAGEMENT
Tiago Martins
1
, Pedro Brandão Silva
1
, António Coelho
1,2
and A. Augusto Sousa
1,2
1
INESC Porto, DEI, Faculdade de Engenharia, Universidade do Porto, Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
2
3Decide / Palcos da Realidade, UPTEC - PINC, Praça Coronel Pacheco, 2, 4050-453 Porto, Portugal
Keywords: Urban Ontology, Interactive Collaborative Virtual Environment, Procedural Modeling, Virtual Reality.
Abstract: The municipal planning and management tasks are generally performed based on text documents or through
digital maps provided by geographic information systems (GIS). However, most municipal GIS follow
different data models, leading to interoperability problems when there is a need to combine data from
different sources. Furthermore, most of the time these tasks are performed in a collaborative way between
the municipal technicians, emerging some difficulties in decision making due to the three-dimensional
nature of urban space. Thus, this paper describes a methodology which can integrate multiple sources of real
data from diverse municipal GIS, in a unified data model based on the CityGML specification. This model
is mapped onto an urban ontology oriented for procedural modeling, which, in turn, produces the three-
dimensional models of the urban environments. The system developed operates in a client-server approach,
where the server is responsible for mapping the urban information to the unified data model and the client
represents the procedural modeling technology that generates the urban environment in three-dimensional
format, allowing users to interact and amplify the existing urban information.
1 INTRODUCTION
GIS systems are very common in urban planning
and management, since they enable and facilitate the
analysis, administration and representation of the
urban spaces. However, most municipal GIS follow
different data models, leading to integration
problems, and in addition, these tasks are often
performed in a collaborative way between the
municipality technicians emerging thereby some
difficulties in decision making due to the three-
dimensional nature of urban space. In this sense,
virtual urban environments can be used with great
effectiveness, since 3D models are natural
metaphors for the interaction with the urban
environments.
Due to these factors, new perspectives arise
concerning new ways of exploration and
development of urban spaces, such as the use of
automatic techniques to generate the virtual urban
environments. Thus, this work has as its main goal
the development of a methodology which allows the
integration of real world data sources, from different
municipal GIS, in an unified data model, mapped
onto an urban ontology oriented for procedural
modeling. This information is then displayed in
three-dimensional format by employing procedural
modeling methodologies, providing a more natural
and intuitive system to operate on the virtual urban
environments.
2 RELATED WORK
The main reason to use urban ontologies is because
they can help extracting information related to the
vocabulary used in the municipal planning and
management, in order to minimize interoperability
and cooperation issues between databases with
urban information from different sources (Laurini,
2007). Over the years, several standard data models
have focused on the issue of interoperability, such as
the GML (Portele, 2007), KML (Wilson, 2008) and
CityGML (Groger et al., 2008).
The Geography Markup Language (GML) is an
XML data model for transport and storage of
geographical information, including spatial and non-
spatial characteristics and whose specification
507
Martins T., Brandão Silva P., Coelho A. and Augusto Sousa A..
AN URBAN ONTOLOGY TO GENERATE COLLABORATIVE VIRTUAL ENVIRONMENTS FOR MUNICIPAL PLANNING AND MANAGEMENT.
DOI: 10.5220/0003849705070510
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 507-510
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
defines mechanisms, conventions and syntax in
XML Schema., which provide an open framework
for the definition of schemas and objects for
geospatial applications.
The Keyhole Markup Language (KML) is an
XML language focused on geographic visualization,
including annotation of maps and images.
Geographic visualization includes not only the
presentation of graphical data on the globe, but also
the control of the user’s navigation in the sense of
where to go and where to look.
The City Geography Markup Language
(CityGML) is an open data model structure and
standardized code based on XML for storing and
exchanging virtual 3D city models. The common
information model behind CityGML defines classes
and relationships for the most relevant topographic
objects in cities and regional models with respect to
their geometrical, topological, semantic and
appearance properties.
In comparison to GML, CityGML represents not
only the geometry of the urban objects, but also
represents the semantic and thematic properties of
the city. The KML and CityGML overlap in the
functionality, but they differ in other important
issues. Both standards use similar geometry
elements to represent the characteristics of the real
world, but the KML lacks many of the semantic
properties included in CityGML.
Finally, Kolbe et al. (Kolbe, Konig, Nagel, &
Stadler, 2009) present a 3D geodatabase for
CityGML. The CityGML data model is mapped into
a relational database schema, allowing users to store,
represent and manage virtual models of the cities.
Additionally, this work provides a tool which
imports and exports data in CityGML and GML
structures.
3 WORK DESCRIPTION
The model of a city has certain characteristics that
favor the use of procedural modeling for its
generation, such as the existence of several repeated
patterns in their shape or the possibility to structure
its content hierarchically. Additionally, due to their
size and complexity, these models require many
resources, making it appealing to apply procedural
modeling techniques in order to reduce the
development time and costs.
Thus, the developed methodology intends to
integrate multiple real world data sources, from
different municipal GIS, into an unified data model
mapped based on an urban ontology oriented for
procedural modeling. The proposed urban ontology
allows the integration of different data on the same
data model, allowing the interpretation of this data to
be always the same. This facilitates the later
representation of urban information in three-
dimensional format by using procedural modeling
techniques, where the geometric information does
not need to be stored, but can rather be generated
when needed, producing the same results.
3.1 Definition of Urban Ontology
Having as base specification the CityGML (Groger,
Kolbe, Czerwinski, Nagel, 2008) and the work of
Kolbe et al. (Kolbe et al., 2009), an ontology was
defined which meets the expectations presented in
this paper. The selection of CityGML was used since
it is an OGC standard and a very flexible and
complete data schema, capable of describing urban
environments in detail. However, whereas the
CityGML specification is very focused on the
representation of urban objects, through the
association of geometric properties, this new urban
ontology is oriented to the description of the main
urban elements, in order to be used by procedural
modeling methods. Thus, it is important that the
procedural modeler is fed with all the semantic
information of the city rather than a large quantity of
geometric information, since it can (aside from some
base geometries) generate automatically such
tridimensional data.
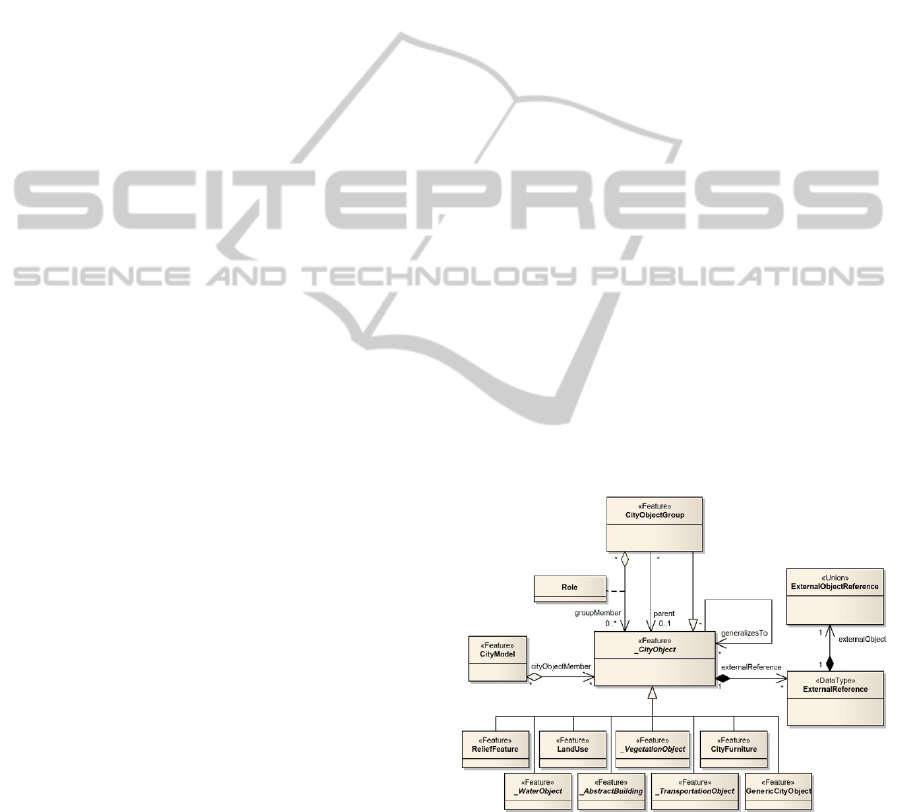
Figure 1: Core data model, defining the basic concepts and
components.
The proposed urban ontology was materialized in
an unified data model for procedural modeling of
urban environments. Similarly to the CityGML
standard, the new data model includes the geometric
model, the appearance model and the different
thematic models of the urban environment (Groger
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
508
et al., 2008). The geometric model is responsible for
storing the geometrical information of urban
elements while the appearance model is responsible
to store the information about the appearance of
urban elements, such as the visible properties that
reinforce their 3D representation. The thematic
models allow the definition of classes which
represent the different types of objects contained in a
city, allowing the storage of the thematic and
semantic concepts of the entities that characterize
the urban space (Figure 1).
3.2 Data Mapping
Since the information about urban elements is not
centralized on a single data source and, furthermore,
knowing that this information is not common to the
majority of GIS data sources of the municipalities
and government institutions, different levels of
mapping were defined, according to the available
information detail of the urban elements. Thus, the
concept of LOM (Level of Mapping) was introduced
which refers the minimum information that an entity
must possess for a certain kind of procedural method
to be used. This allows the definition of more
specific model generation rules, therefore
eliminating the need to check for the existence and
validity of each data field.
Besides the definition of LOMs, it becomes
necessary to create processes that map the
information from the municipal GIS into the defined
data model, which is not a simple task, mainly due
to the size and complexity of urban information.
Additionally, data from the information sources of
the municipalities have different formats and data
models. These problems are derived by the lack of a
unique and uniform data model.
Thus, a methodology was specified, allowing the
mapping of the information onto the data model. The
first stage is not automated, and human intervention
is required in order to interpret the original data to
be mapped, since most of documentation is only
intended for humans. So, it is required that the
meaning of the original data is interpreted, for which
the data model tables and columns of these tables
will be mapped, and the type of operations that will
Figure 2: Mapping the original data (left) in the data
model (right).
focus on these data. This information represents the
settings for the mapping of the original data and it
can be specified through external files such as XML,
for example. Figure 2 illustrates an example of this
process.
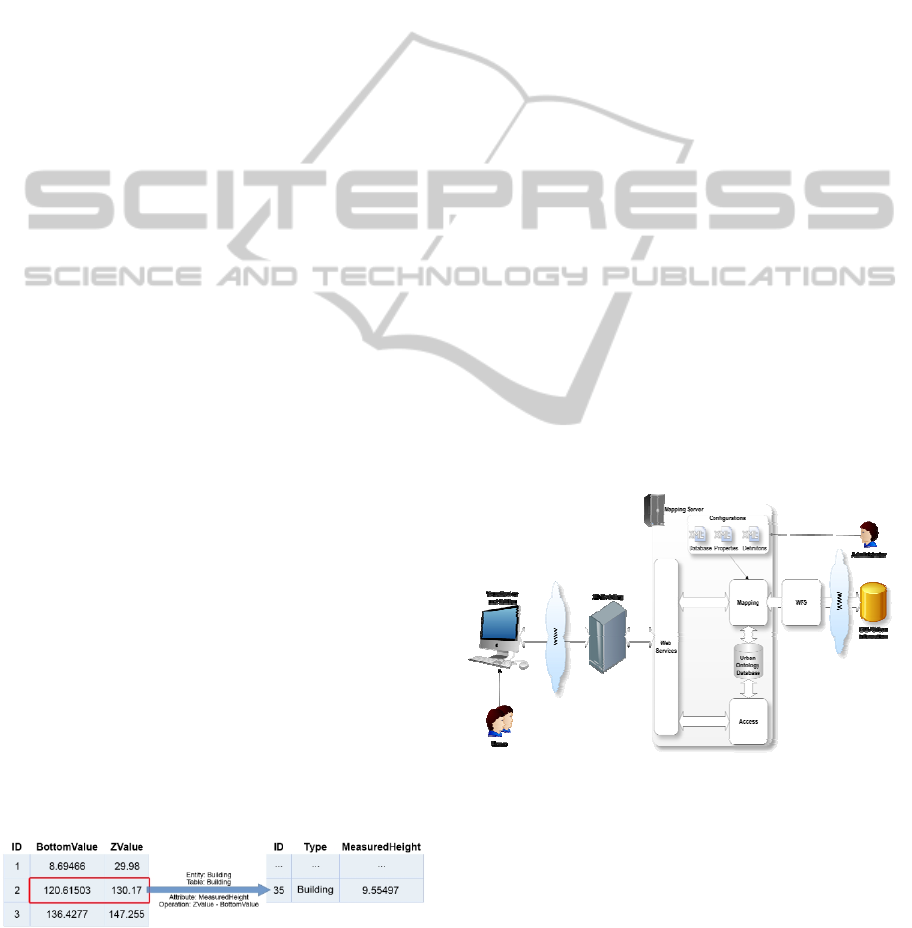
3.3 Implementation
The developed system operates in a client-server
architecture, where the server is responsible for
mapping the urban information and the client
represents the procedural modeling technology. The
mapping server was implemented with a
PostgreSQL database management system, equipped
with the spatial extension PostGIS and the
procedural language PL/pgSQL. In addition to the
mapped data, the server provides, through Web
Services, a set of operations that allow the
procedural modeling technology to access, edit and
amplify the existing urban data. The procedural
modeling technology, represented by the PG3D
modeler (Silva, Coelho, 2011) has the responsibility
for generating the information of urban space in
three-dimensional format. After the procedural
generation, users can view and interact with the
urban environment. In order to achieve this, the
mapping server contains a version control system
capable of storing different instances of the same
object, which means a previous version can be
retrieved at any time.
Figure 3 shows an overview of the architecture
of the implemented system.
Figure 3: Overview of the architecture.
4 RESULTS
A proof of concept has been developed, consisting in
the demonstration of each involved step. The
original data was obtained from two different
sources of information representing buildings that
were defined in two levels of mapping (LOM0 and
LOM1). This information was then mapped into the
AN URBAN ONTOLOGY TO GENERATE COLLABORATIVE VIRTUAL ENVIRONMENTS FOR MUNICIPAL
PLANNING AND MANAGEMENT
509

defined data model. Out of it, the visualization of an
urban environment was achieved, which was created
based on real data, and which allowed users to
interact and to amplify the existing urban
information. Figure 4 shows the final result.
Figure 4: Viewing and editing of
urban
inf
ormation.
After confirming the edition, the PG3D modeler
requests an operation to the web service provided by
the mapping server, so that it records the changes in
the database of urban ontology. These changes
involve the creation of a new version for the
manipulated building. The previous version goes to
an inactive state, but can be retrieved.
5 CONCLUSIONS AND FUTURE
WORK
This paper presents a unified data model based on
the CityGML specification oriented towards the
procedural modeling of collaborative virtual urban
environments.
Due to the size and complexity of the urban
environments there is still much work to do. The
real data used in the proof of concept represented
only the buildings. In addition to these, a city
consists of other entities such as streets, water
bodies, vegetation, and city furniture, among others.
Each entity requires a detailed and independent
study about the mapping process of information
sources of these objects. Therefore, future work will
concern the study of the mapping data for these
entities, allowing the development of a prototype
with a higher quality of information about the urban
environment. Additionally, it is necessary to refine
and create new features for manipulating the existing
urban information in order to perform tests that
confirm the visual fidelity of the urban environment.
ACKNOWLEDGEMENTS
This work is partially supported by the Portuguese
government, through IAPMEI, and the European
Union (QREN and FEDER) through the project
QREN 2010/12319 SI I&DT entitled “GIS2R –
Geração e Exploração de Ambientes 3D Urbanos
Reais”.
REFERENCES
GeoServer. (2011). GeoServer. (Available at http://geo
server.org/, accessed on June 2011)
Groger, G., Kolbe, T., Czerwinski, A., & Nagel, C.
(2008). OpenGIS R City Geography Markup
Language (CityGML) Encoding Standard. (Available
at http://www.opengeospatial.org/standards/citygml,
accessed on June 2011)
Gruber, T. (1993). A translation approach to portable
ontology specifications. Knowledge acquisition, 5,
199–220.
Kolbe, T., Konig, G., Nagel, C., & Stadler, A. (2009). 3d-
geo-database for citygml - version 2.0.1. Institute for
Geodesy and Geoinformation Science Technische
Universitat Berlin.
Laurini, R. (2007). Pre-consensus Ontologies and Urban
Databases. Ontologies for Urban Development, 27–
36.
Portele, C. (2007). OpenGIS R Geography Markup Lan-
guage (GML) Encoding Standard. (Available at http:
//www.opengeospatial.org/standards/gml, accessed on
February 2011)
Brandão Silva, P., & Coelho, A. (2011). Procedural
Modeling for Realistic Virtual Worlds Development.
Journal Of Virtual Worlds Research, 4(1).
Wilson, T.(2008). OpenGIS® Keyhole Markup Language
(KML). (Available at http://www.opengeospatial.org
/standards/kml, accessed on February 2011)
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
510
