
A FAST VOTING-BASED TECHNIQUE FOR HUMAN ACTION
RECOGNITION IN VIDEO SEQUENCES
Duc-Hieu Tran and Wooi-Boon Goh
Centre for Multimedia and Network Technology, School of Computer Engineering, Nanyang Technological University,
Singapore, Singapore
Keywords:
Human Action Recognition, Local Feature, Voting Framework, Nearest Neighbor.
Abstract:
Human action recognition has been an active research area in recent years. However, building a robust human
action recognition system still remains a challenging task due to the large variations in action classes, varying
human appearances, illumination changes, camera motion, occlusions and background clutter. Most previous
work focus on the goal of improving recognition rates. This paper describes a computationally fast voting-
based approach for human action recognition, in which the action in the video sequence is recognized based
on the support of the local spatio-temporal features. The proposed technique requires no parameter tuning
and can produce recognition rates that are comparable to those in recent published literature. Moreover, the
technique can localize the single human action in the video sequence without much additional computation.
Recognition results on the KTH and Weizmann action dataset are presented.
1 INTRODUCTION
Human action recognition in video sequences is an
active research area in the Computer Vision com-
munity. The approaches to this problem can be di-
vided into holistic approach (Bobick and Davis, 2002;
Weinland et al., 2006; Yilmaz and Shah, 2005; Blank
et al., 2005; Aggarwal and Ryoo, 2011) and local
feature approach (Laptev, 2005; Dollar et al., 2005;
Willems et al., 2008; Yuan et al., 2009; Niebles et al.,
2008). In a local feature approach, the action is rep-
resented as a set of local features extracted from the
video sequence. The actions can be then classified us-
ing parametric learning methods (e.g. Support Vector
Machine, Boosting, etc.) or a non-parametric tech-
nique such as the nearest neighbor classifier. In gen-
eral, these machine learning techniques require the
computation of similarity between two feature sets.
To reduce the computational complexity, the feature
vectors are often quantized to form a visual vocabu-
lary and the video is then represented as a histogram
of the visual codewords in this vocabulary. This is
the well-known bag of word model technique (Wang
et al., 2009).
Unfortunately, the quantization process often re-
sults in the loss of information. Moreover, as a
property of clustering algorithms, the clusters will be
formed from the dense feature clouds, which are oft-
en the common features in all videos. These general
features are good for building a vocabulary but they
are not discriminative enough to describe the vari-
ous human actions in video sequences. On the other
hand, the sparse but discriminative features will be
often removed during the quantization process due to
their larger distances from the cluster centroids (i.e.,
visual words) (Boiman et al., 2008). The large varia-
tion in human appearances and action viewpoints also
means that the size of the vocabulary must be large
enough to achieve reasonably discriminative code-
words. As stated in (Wang et al., 2009), the vocab-
ulary size should be around 4000 for a wide range
of datasets. With such a large visual vocabulary, the
computational time required to represent a video as a
histogram of visual words can be quite long since it is
necessary to compute the distance from each feature
to every visual word.
Most previous work on human action recognition
focus on new approaches to improve the recognition
rates. Few address the computational speed issues
of the recognition process. Inspired by the query-
to-class distance proposed in (Boiman et al., 2008)
and the use of random forest in object recognition to
speed up the classification process, we proposed a fast
voting-based framework, in which each local feature
will cast a support for the action class in the video.
In addition, the approach avoids the need to quantize
613
Tran D. and Goh W..
A FAST VOTING-BASED TECHNIQUE FOR HUMAN ACTION RECOGNITION IN VIDEO SEQUENCES.
DOI: 10.5220/0003850606130619
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 613-619
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

the feature vectors and thus avoids the need to tune
parameters (Laptev et al., 2008; Yuan et al., 2009;
Willems et al., 2008). The video will then be assigned
to the action class of the major support within all
the detected local features. Experiments on the KTH
(Schuldt et al., 2004) and Weizmann (Blank et al.,
2005) datasets gave comparable recognition rates to
that in recent literature and the computational time
for classification is much faster than the bag of word
model approach.
2 RELATED WORK
In a voting framework where a video (or an image
in object recognition case) is represented as a set of
features, each feature will cast a vote for the action
category (or object category, respectively) contained
in the video or the image. Given a video that is rep-
resented as a set of features, the posterior probability
P(C| f ) of a feature f to a class C can be viewed as a
vote of that feature for the class C. We discuss pre-
vious work that classifies the image, objects or action
based on the voting of individual feature to a class.
Yuan et al. (Yuan et al., 2009) computed the votes
s
C
( f ) of feature f for a class C and the action recogni-
tion is transformed into the problem of searching for a
subvolume of maximum supporting score for the ac-
tion class.
In (Gall and Lempitsky, 2009) the posterior prob-
ability P(C| f ) of a feature f belonging to class C
is computed from a random forest (Breiman, 2001).
Given a built random forest, if the feature f falls into
a leaf node L then P(C| f ) will be estimated as the ra-
tio of features from class C at leaf node L. Yao et al.
(Yao et al., 2010) extended the idea to human action
recognition, however their approach is time consum-
ing and computational costly since it requires human
body detection and tracking in each video frame.
In an unsupervised approach, Niebles et al.
(Niebles et al., 2008) applied the probabilistic Latent
Semantic Analysis (pLSA) model to the problem of
human action recognition. From their model, one can
extract the value p(C|w, v), the probability of action C
for a visual word w in a particular video v. The action
can be localized as the cluster of the estimated local
features.
In a bag of word model, the vocabulary is often
built by a clustering method such as k-means. Each
cluster centroid is considered as a visual word and a
feature is quantized to the most similar visual word
(i.e., the closest by a distance measure such as L
1
or
Euclidean distance). This process can be seen as a
way to separate the feature space into regions of sim-
ilar features. The k-means clustering approach tends
to group region with dense features into a cluster. As
a result, discriminative features are often suppressed
over commonly occurring features due to their large
distance (dissimilarity) to a centroid. Moreover, k-
means clustering methods are computationally costly,
especially when the number of clusters is large.
In (Moosmann et al., 2006) the authors proposed
a method called Extremely Randomized Clustering
Forest to effectively build visual vocabulary using a
random forest (Breiman, 2001). At each node of a
random tree, the feature set is splited into two dis-
criminative sets by an optimal binary function. The
leaf nodes of the trees will form the visual vocabulary
where each leaf node is a visual word.
Lepetit et al. (Lepetit et al., 2005) performed lo-
cal feature classification in real-time by randomized
trees to localize an instance image in a video. Their
binary function for an image patch is slightly differ-
ent in that it is the comparison of the intensity value
of two random pixels in the image patches.
Although using different binary functions, the
building of visual vocabulary or the classification of
local patches by random forests are based on the same
observation that the local image patch can be seen as
a vector of its flattened intensity values or encoding
descriptor. Then the patch can be represented as a
point in N-dimensional feature space, where N is the
number of pixels in the image patch or the dimension
of the feature descriptor. The binary function at each
tree node will define a hyperplane that splits the fea-
ture space into two discriminative regions. From that
point of view, each leaf node of a tree can be seen as a
region in feature space in which the features are simi-
lar but highly distinguishing to those in other regions.
Also inspired by the use of random forests, in
(Silpa-Anan and Hartley, 2008) the authors have pro-
posed a framework to approximately find the near-
est neighbors using randomized kd-trees. Instead of
uniformly choosing the dimension to split as in tradi-
tional kd-trees, they randomly choose the dimension
from D dimensions in which the data has the greatest
variance. The experiments in (Muja and Lowe, 2009)
showed that it is efficient to fix D = 5. The idea of
building randomized kd-trees is very similar to that of
building a visual vocabulary in (Gall and Lempitsky,
2009).
3 THE PROPOSED APPROACH
Inspired by the fast recognition of keypoints in im-
ages (Lepetit et al., 2005) and the Naive Bayes Near-
est Neighbor classifier (Boiman et al., 2008) that is
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
614

based on the image-to-class distance, we proposed a
voting framework called Vote-1NN.
Given a test video Q consisting of local spatio-
temporal features f
1
, . . . , f
K
which are independent
identically distributed, under the Bayesian assump-
tion and the uniform of the prior probability P(c), the
Maximum Likelihood classifier is formulated as:
ˆc = arg max
c
P(Q|c) = arg max
c
K
∏
i=1
P( f
i
|c)
= arg max
c
K
∏
i=1
P(c| f
i
)P( f
i
)
P(c)
(1)
Assuming the uniform of P( f
i
) and P(c), take the log
probability of the rule, we have:
ˆc = arg max
c
K
∑
i=1
logP(c| f
i
) (2)
Assume the local features are extremely discrimi-
native and each local feature can be classified to one
of the action classes:
P(c| f
i
) =
(
1, if f
i
is from class c
0, otherwise
(3)
The posterior probability P(c| f
i
) can be intuitively in-
terpreted as the support of feature f
i
to class c. With
an arbitrary distribution of local features, the support
of a local feature f
i
in a test video to an action class
c can be assigned as the same as the support of its
nearest neighbor to c. This is the key idea of the clas-
sification by the nearest neighbor, but here we apply
it to the local features but not the video sequences.
From Equation (2) and (3), we define function g(c, f
i
)
as follows:
g(c, f
i
) =
1, if the nearest neighbor of f
i
is from class c
0, otherwise
(4)
The original classification problem is formulated as:
ˆc = arg max
c
K
∑
i=1
g(c, f
i
) (5)
The formulation in (5) can interpreted as follows: the
human action in a video sequence will be recognized
based on the majority votes of the local features.
In the pre-processing phase, a training feature set
is formed from all the features extracted from train-
ing video sequences. These features are assigned to
the action class of the video from which they are ex-
tracted. Given a feature f
i
from a test video sequence,
based on the action class of its nearest neighbor in
the training feature set, we can compute the value of
g(c
k
, f
i
) for all action classes c
k
at once. In our exper-
iment, the search of the nearest neighbor can be per-
formed reliably and speedily by building the random-
ized kd-trees (Silpa-Anan and Hartley, 2008). Our
proposed approach is computational fast, it does not
require a complicated training phase but only a pre-
processing phase in which the randomized kd-trees
are built.
After recognizing the human action in the given
video sequence, the center of the human action can be
localized based on the positions of the local features
that support the recognized action class. According
to the experiment on the KTH dataset in (Schindler
and Gool, 2008), human action can be accurately rec-
ognized in about 7 frames of a video sequence. As
such, the center of the human body performing the
recognized action in a given frame is also estimated
as the centroid of all supporting features (i.e., the fea-
tures that support the recognized action class) about 7
neighboring frames. The proposed process is straight-
forward, has low computational cost and yet produces
acceptable localization accuracy.
4 EXPERIMENT AND
DISCUSSION
We performed the experiments on two popular human
action datasets: KTH (Schuldt et al., 2004) and Weiz-
mann (Blank et al., 2005). We also compared our ap-
proach with an extension of the NBNN image classi-
fier (Boiman et al., 2008).
4.1 Extended Naive Bayesian Nearest
Neighbor (NBNN)
Since the work of (Boiman et al., 2008) is similar
to the Vote-1NN approach with terms of query-to-
class distance, we extended the Naive Bayes Near-
est Neighbor (NBNN) image classifier to perform
human action recognition in video sequences. The
NBNN classifier for human action recognition was
then tested on the KTH and Weizmann action dataset
in the following manner:
1. for a test video sequence, extract the local features
f
1
, f
2
, . . . , f
n
2. action class
ˆ
C = arg max
C
∑
n
i=1
|| f
i
− NN
C
( f
i
)||,
where NN
C
( f
i
) is the nearest neighbor of f
i
within
all features of class C. We use L
1
distance instead
of L
2
as in (Boiman et al., 2008).
A FAST VOTING-BASED TECHNIQUE FOR HUMAN ACTION RECOGNITION IN VIDEO SEQUENCES
615

4.2 KTH Action Dataset
The KTH Action Dataset consists of 2391 video se-
quences of six human actions: boxing, hand waving,
hand clapping, running, jogging and walking. The ac-
tions were performed by 25 subjects in four different
scenes. Each action is performed three or four times
by each subject in each scene. Following the stan-
dard setup in (Schuldt et al., 2004), videos of sixteen
subjects were used for training and videos of nine re-
maining subjects were used for testing. The recogni-
tion rates are reported as average class accuracy.
The features were detected by Harris3D interest
point detector (Laptev, 2005) and represented by dif-
ferent types of descriptors: Histogram of Oriented
Spatial Gradient (HOG), Histogram of Optical Flow
(HOF), HOGHOF (i.e., the combination of HOG and
HOF) (Laptev et al., 2008) and Histogram of 3D Gra-
dients (HOG3D) (Klaser et al., 2008).
The nearest neighbor search in our experiment
is performed by building the randomized kd-trees
(Silpa-Anan and Hartley, 2008). We used the ex-
isting library FLANN provided by Muja and Lower
(Muja and Lowe, 2009) with the following settings:
the number of random dimensions is 5, the number of
randomized trees is 10, the distance between features
is L
1
.
The results for the HOG, HOF, HOGHOF
and HOG3D descriptors respectively are 82.16%,
89.57%, 91.08% and 89.34%. Table 1 shows the con-
fusion table for HOGHOF descriptor.
Table 1: The result of our approach (Vote-1NN) with Har-
ris3D interest point detector and HOGHOF descriptors on
the KTH dataset. The average accuracy is 91.08%.
gt\res box hclap hwave jog run walk
box 97.9 0 0 0 0 2.1
hclap 1.39 97.92 0.69 0 0 0
hwave 0 6.94 93.06 0 0 0
jog 0 0 0 95.14 2.78 2.08
run 0 0 0 37.5 62.5 0
walk 0 0 0 0 0 100
There is no misclassification of the moving ac-
tions (i.e., jogging, running, walking) to the station-
ary actions (i.e., boxing, handclapping, handwaving)
with any of the four types of feature descriptors. This
means that despite the use of appearance features or
motion features, our approach can accurately distin-
guish these two kinds of actions. The results on the
running action are poor and it is mostly misclassified
to the jogging action. The higher accuracy of run-
ning action achieved by HOG and HOG3D features
(i.e., 63.19% and 75.69% respectively) is probably
due to the more reliable differences in human poses
of running and jogging (stride variations) compared
to temporal changes due to leg motions. HOGHOF
descriptor that encodes both appearance and motion
information gave the best results with overall accu-
racy of 91.08%, which is comparable to the state of
the art results shown in Table 3. Although the video
sequences in KTH dataset contain slight camera mo-
tion and variant view points, the high recognition rates
achieved by our approach (i.e., except for misclassifi-
cation of running to jogging, the average accuracy for
other five actions is about 97%) suggest that our ap-
proach is reasonably robust to the problems of cam-
era motion and view variance. These problems are
more difficult to solve in a framework that uses vector
quantization. The results of extended NBNN for KTH
dataset using descriptors HOG, HOF, HOGHOF and
HOG3D are 84.94%, 89.80%, 92.24% and 91.31%
respectively. This could be due to the fact that in
NBNN approach, the distances from the local features
in the query video to their nearest neighbors in all ac-
tion classes are computed and accumulated. In that
manner, the features that are not highly discrimina-
tive (i.e., its distance to the nearest neighbors in all
action classes are only slightly different) will not con-
tribute significantly to the final decision of the action
class. In contrast, the local features in our approach
are each assigned to only one action class. As a re-
sult, we reap the advantage of lower computational
complexity since searching for the nearest neighbor
is done only once.
4.3 Computational Speed
Based on a KTH dataset test case where the features
have been extracted by Harris3D and described by
the HOGHOF descriptor, we compared the perfor-
mance of our approach with the bag of word model
approaches by following the experiment setup on the
KTH action dataset described in (Wang et al., 2009)
(i.e., the number of visual words is 4000 and the vi-
sual vocabulary is built by k-means clustering). The
classifications were performed using Support Vec-
tor Machine (Chang and Lin, 2001) with χ
2
ker-
nel (Laptev et al., 2008) and Pyramid Match Kernel
(PMK) (Grauman and Darrell, 2007). Our approach
does not require us to build the visual vocabulary –
a process that requires a lot of time, especially for
a large vocabulary size. Moreover, it only takes an
average of 0.05 seconds for our Vote-1NN approach
to classify an action in a video sequence with an av-
erage of 100 frames. Using the same computational
resources and test video sequences, the bag of word
model with SVM+χ
2
kernel and SVM+PMK took
an average of 0.95 and 2.5 seconds respectively to
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
616
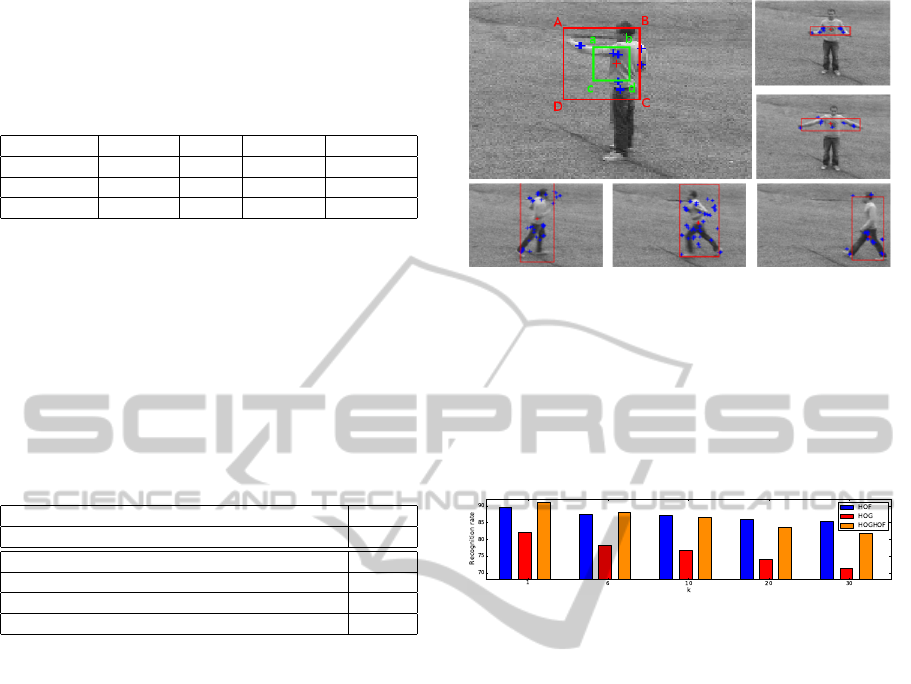
Table 2: The performance of different approaches on the
KTH action dataset. Time of performing recognition is es-
timated on video sequences of average 100 frames. Our
approach Vote-1NN can perform much faster than the bag
of word model approaches and is able to localize the center
of human action in video sequences.
Vote-1NN NBNN SVM + χ
2
SVM+PMK
time (sec) * 0.05 0.25 0.95 2.5
accuracy (%) 91.08 92.24 91.80 91.08
localization YES NO NO NO
classify an action. The comparative recognition rates
of the various approaches are comparable, as shown
in Table 2, while our approach can compute the re-
sults much faster (i.e., 5, 20 and 50 times faster than
NBNN, SVM+χ
2
and SVM+PMK respectively) and
it is able to localize the center of human action.
Table 3: Recognition rates on the KTH dataset of the ex-
tended NBNN and our Vote-1NN approach compared to
other well known techniques. Except for (Niebles et al.,
2008), all experimental setups are consistent.
Extended NBNN 92.24%
Vote-1NN 91.08%
Subvolume search (Yuan et al., 2009) 93.3%
Harris3D + SVM-χ
2
(Laptev et al., 2008) 91.8%
Unsupervised learning (Niebles et al., 2008) 83.3%
Harris3D + local SVM (Schuldt et al., 2004) 71.7%
4.4 Human Action Localization
We localized the recognized action based on our Vote-
1NN approach by estimating the action centers in the
test KTH video sequences using the centroid of the
spatial positions of the local features that have been
classified to the action class. The centroid position
is computed from the cluster of features within 7 con-
secutive frames centered about the current frame. The
location of the action is approximately bounded by a
spatial window containing the features used to com-
pute the spatial mean. The action center (x
C
, y
C
) is
computed as average of the spatial locations (x
i
, y
i
)
of all local features that support the classified action
in the video sequences. The local window around
the action is defined by the upper-left (x
L
, y
U
) and
the lower-right (x
R
, y
L
), where x
L
and x
R
are the av-
erage of x-position of the local feature points on the
left and right respectively of the action center point
(x
C
, y
C
), y
U
and y
L
are the average of y-position of
the local points above and below respectively of the
point (x
C
, y
C
). From our empirical studies, the local
action window specified by (x
L
, y
U
) and (x
R
, y
L
) is en-
larged to twice the size to better capture the spatial
area where the human action can be localized.
Figure 1: The localization of six action classes in the KTH
dataset. Computed centers of actions (x
C
, y
C
) are marked
with a red cross-hair and the local features supporting the
action are blue. The upper-left image illustrates the lo-
calization of actions in video sequences. The small win-
dow (a, b, c, d) is estimated by values (x
L
, y
U
), (x
R
, y
L
), and
the local action window (A, B, C, D) that is at twice size of
(a, b, c, d) will capture the spatial area where the human ac-
tion can be localized.
Figure 2: The recognition rates with respect to value of K
on KTH action dataset.
We manually checked the action location esti-
mated for 100 randomly selected video sequences
from the KTH dataset and found that the centers were
appropriately located at the human body performing
the actions. This suggests that the Vote-1NN ap-
proach can be used to localize the action centers as
shown in Figure 1.
We analyzed the effect of the number of nearest
neighbors to the recognition rates on the KTH ac-
tion dataset. Instead of assigning the action class of
the nearest neighbor to a test local feature from the
test video sequences, as is the case for Vote-1NN, we
assigned the action class represented by the major-
ity among K nearest neighbors (i.e., the standard K-
nearest neighbor setting). The recognition rates with
respect to different value of K are shown in Figure 2.
Increasing value of K decreases the recognition rates
and the best performance is achieved by our proposed
Vote-1NN approach (i.e., K = 1). This result justifies
our proposed approach of using only a single nearest
neighbor.
A FAST VOTING-BASED TECHNIQUE FOR HUMAN ACTION RECOGNITION IN VIDEO SEQUENCES
617
4.5 Weizmann Action Dataset
We also performed the experiment on the Weizmann
action dataset (Blank et al., 2005). The Weizmann
dataset consists of 93 video sequences of ten different
action classes performed by 9 subjects in the scene
with static background. The results of Vote-1NN and
the extended NBNN on Weizmann dataset are shown
in Table 4. We use the leave-one-subject-out setup
for the Weizmann dataset, i.e., for each test, video
sequences of one subject are used for testing while
the training feature set is formed from the video se-
quences performed by the remaining subjects. The
recognition rates shown are computed as an average
accuracy of all tests. Like the results from the KTH
dataset, results from the Weizmann dataset show that
both Vote-1NN and NBNN have comparable perfor-
mance as well. The action localization is performed
on the Weizmann dataset and manually checked. The
samples of action localizations for a random selected
subject in the dataset are shown in Figure 3. The com-
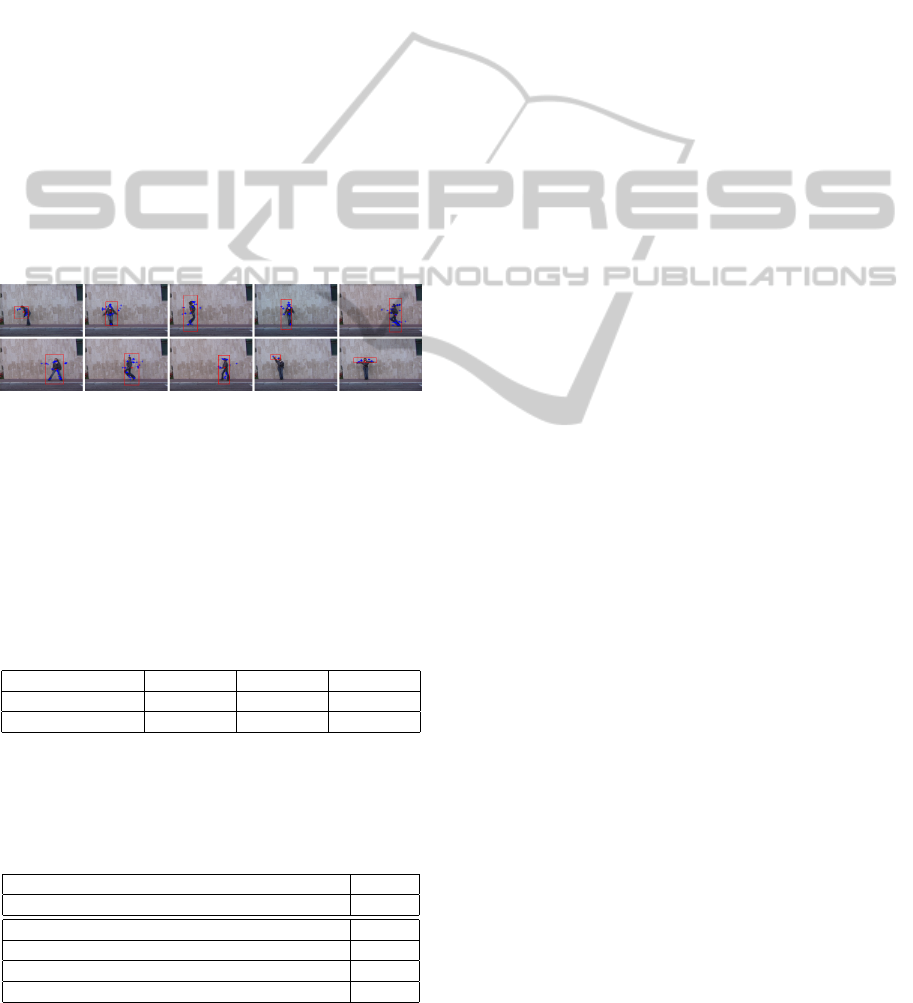
Figure 3: The localization of ten action classes in the Weiz-
mann dataset. Computed centers of actions is marked with
a red cross-hair. The local action windows are marked by
red rectangles.
parison of our approach on the Weizmann dataset with
several well-known bag of word model approaches is
shown in Table 5.
Table 4: The results of our Vote-1NN approach and NBNN
on the Weizmann action dataset with interest point detector
Harris3D and descriptors HOG, HOF and HOGHOF.
Approaches HOG HOF HOGHOF
Extended NBNN 81.88% 90.00% 90.26%
Vote-1NN 83.85% 91.11% 89.15%
Table 5: The comparison of our approach with selected bag
of word model approaches on the Weizmann action dataset.
Based on similar experimental setups, the recognition rates
of Vote-1NN is comparable to the best of the bag of word
model approaches.
Vote-1NN 91.11%
Extended NBNN 90.26%
3D SIFT + BoW (Scovanner et al., 2007) 82.60%
HOG3D + BoW (Klaser et al., 2008) 84.30%
Unsupervised learning (Niebles et al., 2008) 90.00%
Multiple features (Liu et al., 2008) 90.40%
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have presented a novel method for
human action recognition based on the support of
each local feature for its closest action class. Recog-
nition rates of the KTH and Weizmann action datasets
obtained by our approach are comparable to the state
of the art results. The action classification speed is
about 20 to 50 times faster than the various bag of
word model approaches tested and 5 times faster than
the extended NBNN approach. In addition, the pro-
posed Vote-1NN approach is able to localize the hu-
man actions without much additional computational
cost. We have also verified experimentally that us-
ing one nearest neighbor (i.e., Vote-1NN) produces
the best recognition performance compared to case,
where more nearest neighbors were used. Our next
challenge is to apply this voting approach to recognize
and localize multiple simultaneous actions in video
sequences based on the classification of individual lo-
cal features.
REFERENCES
Aggarwal, J. and Ryoo, M. S. (2011). Human Activity
Analysis : A Review. ACM Computing Surveys.
Blank, M., Gorelick, L., Shechtman, E., Irani, M., and
Basri, R. (2005). Actions as space-time shapes. In
CVPR, volume 29, pages 1395–1402.
Bobick, A. and Davis, J. (2002). The recognition of hu-
man movement using temporal templates. TPAMI,
23(3):257–267.
Boiman, O., Shechtman, E., and Irani, M. (2008). In de-
fense of Nearest-Neighbor based image classification.
In CVPR, pages 1–8.
Breiman, L. (2001). Random forests. ML, 45(1):5–32.
Chang, C.-C. and Lin, C.-J. (2001). LIBSVM: a library for
support vector machines.
Dollar, P., Rabaud, V., Cottrell, G., and Serge, B. (2005).
Behavior Recognition via Sparse Spatio-Temporal
Features. In VS-PETS, pages 65–72.
Gall, J. and Lempitsky, V. (2009). Class-Specific Hough
Forests for Object Detection. In CVPR, pages 1022–
1029.
Grauman, K. and Darrell, T. (2007). The pyramid match
kernel: Efficient learning with sets of features. JMLR,
8(2):725–760.
Klaser, A., Marszalek, M., and Schmid, C. (2008). A spatio-
temporal descriptor based on 3D-gradients. In BMVC.
Laptev, I. (2005). On Space-Time Interest Points. IJCV,
64(2-3):107–123.
Laptev, I., Marszalek, M., Schmid, C., and Rozenfeld,
B. (2008). Learning realistic human actions from
movies. In CVPR, pages 1–8.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
618

Lepetit, V., Lagger, P., and Fua, P. (2005). Randomized
trees for real-time keypoint recognition. In CVPR,
pages 775–781.
Liu, J., Ali, S., and Shah, M. (2008). Recognizing human
actions using multiple features. In CVPR, pages 1–8.
Moosmann, F., Triggs, B., and Jurie, F. (2006). Fast dis-
criminative visual codebooks using randomized clus-
tering forests. In NIPS, pages 985–992. MIT Press.
Muja, M. and Lowe, D. (2009). Fast approximate nearest
neighbors with automatic algorithm configuration. In
VISAPP, pages 331–340.
Niebles, J. C., Wang, H., and Fei-Fei, L. (2008). Unsu-
pervised Learning of Human Action Categories Using
Spatial-Temporal Words. IJCV, 79(3):299–318.
Schindler, K. and Gool, L. V. (2008). Action Snippets: How
many frames does human action recognition require?
In CVPR, pages 1–8.
Schuldt, C., Laptev, I., and Caputo, B. (2004). Recogniz-
ing human actions: a local SVM approach. In ICPR,
volume 3, pages 32–36.
Scovanner, P., Ali, S., and Shah, M. (2007). A 3-
dimensional sift descriptor and its application to ac-
tion recognition. In ACM MM, page 357.
Silpa-Anan, C. and Hartley, R. (2008). Optimised KD-trees
for fast image descriptor matching. In CVPR.
Wang, H., Ullah, M. M., Klaser, A., Laptev, I., and Schmid,
C. (2009). Evaluation of local spatio-temporal fea-
tures for action recognition. In BMVC, pages 1–11.
Weinland, D., Ronfard, R., and Boyer, E. (2006). Free
viewpoint action recognition using motion history vol-
umes. CVIU, 104(2-3):249–257.
Willems, G., Tuytelaars, T., and Gool, L. V. (2008). An
efficient dense and scale-invariant spatio-temporal in-
terest point detector. In ECCV, pages 650–663.
Yao, A., Gall, J., and Gool, L. V. (2010). A
Hough Transform-Based Voting Framework for Ac-
tion Recognition. In CVPR.
Yilmaz, A. and Shah, M. (2005). Actions sketch: A novel
action representation. In CVPR, volume 1, pages 984–
989.
Yuan, J., Liu, Z., and Wu, Y. (2009). Discriminative sub-
volume search for efficient action detection. In CVPR,
pages 2442–2449.
A FAST VOTING-BASED TECHNIQUE FOR HUMAN ACTION RECOGNITION IN VIDEO SEQUENCES
619
