
IMPROVED BM3D FOR CORRELATED NOISE REMOVAL
Marcella Matrecano, Giovanni Poggi and Luisa Verdoliva
Department of Biomedical, Electronic, and Telecommunication Engineering, University of Naples Federico II
Via Claudio 21, 80121 Naples, Italy
Keywords: Denoising, Correlated Noise, Nonlocal Filtering, BM3D.
Abstract: Most of the literature on denoising focuses on the additive-white-gaussian-noise (AWGN) model. However,
in many important applicative fields, images are typically affected by non-Gaussian and/or colored noise, in
which cases AWGN-based techniques fall much short of their promises. In this paper, we propose a new
denoising technique for correlated noise based on the non-local approach. We start from the well-known
BM3D algorithm, which can be considered to be the state of the art in AWGN denoising, and modify it in
various critical steps in order to take into account the non-whiteness of noise. Experimental results on
several test images corrupted by correlated noise confirm the potential of the proposed technique.
1 INTRODUCTION
The noise is an unpredictable perturbation which
disturbs a signal causing random fluctuations of the
observed variables. Generally speaking, it is an issue
of considerable importance in any acquiring and
processing data system, especially imaging
techniques. The scientific literature offers a plethora
of denoising functions often included in commercial
software as tools to support and simplify the
extraction of significant information from noisy
images.
In fact, image denoising has been the object of
intense research from the very beginning of the
digital era, with tremendous performance
improvements over the years, especially with the
advent of wavelet-domain shrinkage techniques
originally proposed by Donoho and Johnstone
(1994). Nonetheless, this “mature” field has seen yet
another big leap forward in recent years with the
introduction of the non-local filtering concept, first
formalized in the non-local means (NLM) algorithm
proposed by Buades, Coll and Morel (2005).
The major breakthrough of NLM consists in
selecting in a very sensible way the set of pixels
used to estimate the true value of a target pixel, that
is, not the pixels closest to the target, but those
deemed to be the most similar to it. In practice, for
each target pixel z
T
of the noisy image z(n), the
surrounding patch P
T
is extracted and compared with
all patches P
i
in a given neighborhood of the target.
The patches that are more similar to the target patch,
according to a suitable “distance” measure, are
associated with the most relevant predictor pixels,
that is
=
(1)
where the weight w
i
is a decreasing function of the
distance d
i
= d(P
T
,P
i
).
The nonlocal approach turns out to be especially
effective in the presence of edges and textures, when
patches are well characterized and bring valuable
information on the pixel context, providing a
significant performance improvement w.r.t.
conventional techniques both in the spatial and
transform domain. Following the success of NLM
many variations have been proposed, among which
the block-matching 3d (BM3D) algorithm (Dabov,
Foi, Katkovnik and Egiazarian, 2007), which
appears to be the current state of the art in image
denoising and restoration in general.
Although a thorough description of BM3D is out
of the scope of this work, we need to recall here its
basic steps. The first action taken by BM3D, just
like in NLM, is to locate similar patches by means of
block-matching. Unlike in NLM, however, all such
patches are then collected in a 3D structure which
undergoes a decorrelating transform (typically
wavelet) so as to exploit both spatial and contextual
dependencies. Once a sparse representation is
obtained, some form of shrinkage is used to remove
129
Matrecano M., Poggi G. and Verdoliva L..
IMPROVED BM3D FOR CORRELATED NOISE REMOVAL.
DOI: 10.5220/0003854101290134
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 129-134
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

noise components, before going back in the image
domain. Since filtered patches can overlap, several
estimates of the same pixel are typically obtained,
which are weighted to compute a “basic estimate”
of the denoised image. At this point, the noisy
image z(n) undergoes the denoising process anew,
with the difference that block-matching takes place
on the basic estimate
of the clean image so as
to obtain more reliable matches, and wavelet
shrinkage is replaced by empirical Wiener filtering,
with statistics computed again on
.
Both NLM and BM3D have been proposed in the
context of AWGN image denoising and, therefore,
work poorly in all situations where the noise cannot
be considered Gaussian nor white. Nonetheless, the
nonlocal approach keeps making full sense, and
hence there is much interest in adapting the basic
algorithms to such new conditions. For example,
with reference to synthetic aperture radar (SAR)
images, where the speckle is clearly non-Gaussian
(actually, not even additive) suitable ad hoc versions
of NLM and BM3D have been proposed by
Deledalle, Denis and Tupin (2009) and by Parrilli,
Poderico, Angelino, and Verdoliva (2011)
respectively, with very good results.
The problem of nonlocal image denoising in the
presence of colored noise has been already
addressed as well. A version of NLM for colored
noise (NLM-C) is proposed by Goossens, Luong,
Pizurica and Philips (2008) where the noise is
assumed to come from the linear filtering of white
Gaussian noise. Given the impulse-response of the
filter, and hence all noise statistics, the Authors
replace the Euclidean distance, used originally to
compute the similarity among patches, with the
Mahalanobis distance which takes the noise
covariance matrix into account. Alternatively, to
reduce the computational load, they apply a
prewhitening linear filter to the noisy image and use
the resulting image to compute the weights by the
Euclidean distance. Numerical experiments show
NLM-C to provide significant improvements, both
visually and in terms of PSNR, not only over basic
NLM (called NLM-W in this context) but also w.r.t.
to some recent wavelet-based denoising techniques
for colored noise: BLS-GSM (Portilla, Strela,
Wainwright & Simoncelli, 2003) and MP-GSM
(Goossens, Pizurica, 2009).
Also BM3D has been already adapted, by
Dabov, Foi, Katkovnik and Egiazarian (2008), to the
case of correlated noise. The Authors observe that
the decorrelating transform, used before shrinkage,
outputs coefficients which, due to noise
nonwhiteness, have variances
() that do depend
on the coefficient index i. This fact is taken into
account in various phases of the algorithm: by using
a weighted block distance computed in the transform
domain; by using a different shrinkage threshold for
each coefficient; and by aggregating filtered blocks
based on their expected noise level.
In this work, based on the above ideas, we
propose a new version of BM3D for correlated
noise. We use the basic strategy of the original
BM3D algorithm because of its strong rationale, but
modify it in several steps to keep into account the
actual noise statistics. In particular, we improve the
block matching by resorting to image prewhitening,
and the shrinkage (hard thresholding in the first step,
and Wiener filtering in the second step) by taking
into account the different noise variances of
coefficients and improving their estimate.
2 PROPOSED ALGORITHM
Since the proposed algorithm is a modification of
BM3D, we describe and discuss here only the
differences w.r.t. the original algorithm (Dabov et
al., 2007). The first and probably most important
improvement concerns the block matching, based on
straight Euclidean distance in the original algorithm.
The ultimate goal of block matching is to find
out the signal patches that most resemble the signal
target patch. However, since the clean image is not
available, at least in the first step, one can only work
on signal+noise patches. Therefore, it can happen
that some patches happen to be close to the target
not because of an actual similarity of signal but as
the effect of the random patterns of noise. This
event, relatively uncommon in the AWGN case, can
become a serious problem in the presence of strong
correlated noise, when independent noise samples
are reduced. If the noise is very structured and
comparable in intensity with the signal it can
dominate the block matching phase, leading to the
selection of patches loosely related (in terms of
signal) with one another and, eventually, to a poor
performance. Therefore, in nonlocal approaches it is
very important to counter this problem. To this end,
we carry out a prewhitening of the noisy image. Let
z be the observed noisy image, related to the noise-
free image y by
(
)
=
(
)
+ℎ()∗()
(2)
where u(n) is stationary white noise independent of
y(n), and h(n) is a linear filter. The prewhitened
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
130

image z
pw
(n) is then computed as the inverse
transform of
(
)
=
(
)
1
max
(
,
|
(
)|)
(3)
where
X
() indicated discrete Fourier transform of
x(n), and
ε
is a small positive constant added to
ensure stability. The prewhitened image is then used
to locate the best matching patches, while all other
processing steps take place on the original image. It
is worth underlying that this approach is quite
different from that of Dabov et al. (2008), let us call
it BM3D-C, where no prewhitening is carried out
but block similarity is computed in the transform
domain with a weighted Euclidean distance, with
smaller weights associated to noisier coefficients to
reduce their detrimental effects.
On the contrary, for our second modification,
concerning coefficient shrinkage, we follow closely
the approach proposed by Dabov et al. (2008). In
particular, focusing on the first step of BM3D, we
carry out hard thresholding using a different
threshold for each coefficient, proportional to the
expected variance of noise. In formulas
(
,
)
=
()
(4)
where i and j are indexes associated with the 2D
spatial and 1D transforms, respectively, and is a
constant. By so doing, we increase our chances to
suppress large coefficients originated exclusively
by noise and, at the same time, to keep small
coefficients with significant signal contribution.
As for the variances, following the model in (2),
they can be computed as:
(
)
=
|
(
)
|
(
)
(5)
where
(
)
is the i-th basis element of T
2D
, F{·} is
the discrete Fourier transform operator,
is the
overall noise variance and N
1
is the block dimension.
Our last improvement concerns the empirical
Wiener filtering in the second step which, just like
hard thresholding in the first step, can be adapted to
take into account the actual noise variances of
coefficients according to
(
,
)
=
(
)
(
,
)
(
)
(
,
)
+
()
(6)
where
(
)
(
,
)
is the energy of the 3D
transform coefficients of the basic estimate group
where patches more similar to the target one P
T
of z
T
are collected.
(a) Original (b) Noisy
(c) NLM (d) NLM-C
(e) BM3D-C (f) Proposed
Figure 1: Visual results for a crop-outs of House,
corrupted with correlated noise (σ=30); (a) original image,
(b) noisy image, (c) NLM filtered image, (d) NLM-C
filtered image, (e) BM3D-C filtered image, (f) proposed
technique filtered image.
Here, we propose to estimate the variances
(
)
starting from the basic estimate of the clean
image,
, provided by the first step. As a matter
of facts, BM3D exploits the knowledge of
in
the second step to accomplish several tasks:
is
used to carry out the block matching process, which
is why prewhitening is not required anymore, and
also to obtain reliable estimates of signal statistics
for the Wiener filtering. In the same manner,
assuming that
is a reliable estimate of the
clean image y, the difference between the noisy
image and the denoised one:
(
)
=
(
)
−
(
)
≈ ℎ()∗()
(7)
can be assumed to be a good estimate of the actual
correlated noise. Therefore, by working on this noise
image we can actually measure the coefficient noise
variances, in each single group of blocks, rather than
estimating them according to (5).
IMPROVED BM3D FOR CORRELATED NOISE REMOVAL
131
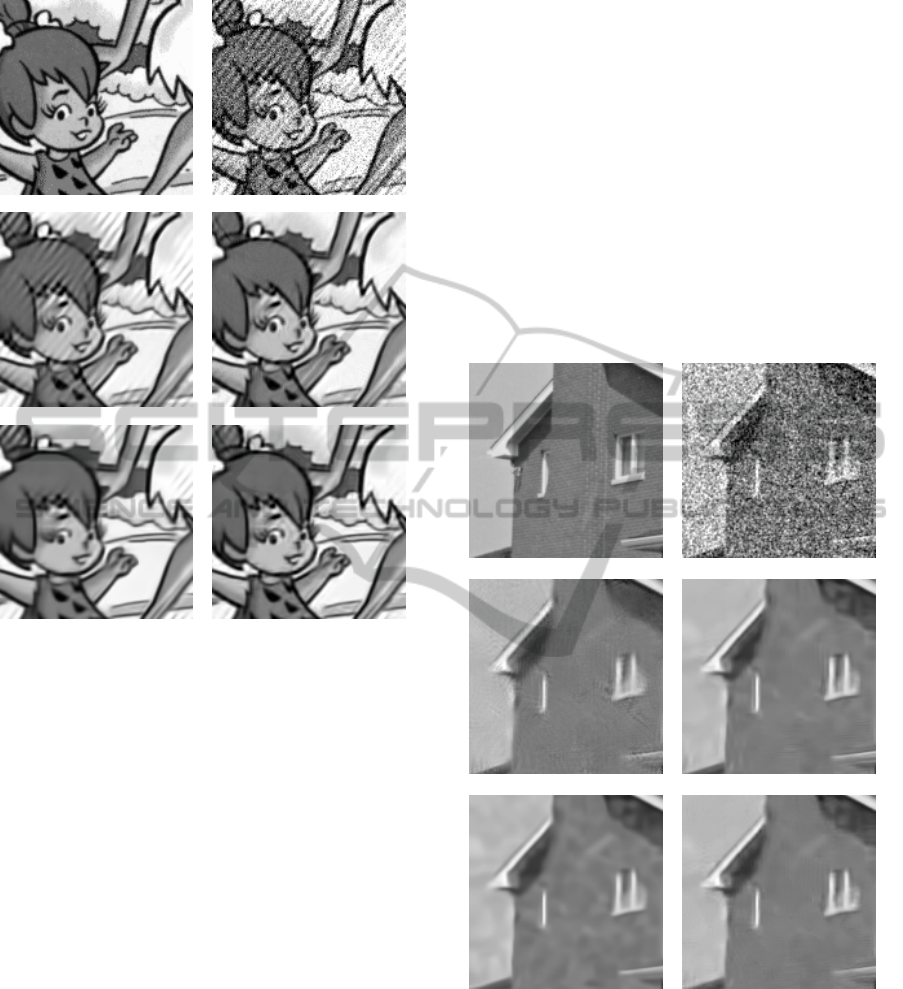
(a) Original (b) Noisy
(c) NLM (d) NLM-C
(e) BM3D-C (f) Proposed
Figure 2: Visual results for a crop-outs of Flinstone,
corrupted with correlated noise (σ=40); (a) original image,
(b) noisy image, (c) NLM filtered image, (d) NLM-C
filtered image, (e) BM3D-C filtered image, (f) proposed
technique filtered image.
3 EXPERIMENTAL RESULTS
In this Section we describe the results of a limited
set of experiments chosen to allow a comparison
with reference techniques and highlight the major
phenomena of interest.
In particular, we have simulated four type of
colored noise: a bandpass noise with σ=30 on
“House” image (Figure 1), and a line pattern noise
like that found on analogue video with σ=40 on
“Flinstones” image (Figure 2), exactly as they
appear in the work of Goossens et al. (2008). In
addition, we simulated two other types of colored
noise, one characterized by a power spectral density
with circulsar symmetry, as usually found in digital
pictures, with σ=35 on “House” image (Figure 3)
and a double line pattern noise with σ=30 again on
“House” image (Figure 4), as a further test of the
efficacy of the proposed method.
Focusing on the numerical results reported in
Table 1, we note first of all that both NLM and
BM3D degrade their performance as the noise
becomes more structured, very likely because of the
detrimental effects of noise on block matching.
In almost all cases, BM3D keeps a 2dB edge
w.r.t. NLM, confirming that the BM3D two-steps
structure leads to better results.
Obviously, the colored-noise versions of the
algorithms, NLM-C and BM3D-C, provide a
significant gain w.r.t. the basic versions, especially
for the case of more structured noise. Note that the
gain of NLM-C over NLM is much stronger than
that of BM3D-C over BM3D, especially for
structured noise.
(a) Original (b) Noisy
(c) NLM-C (d) BM3D-C
(e) BM3D (f) Proposed
Figure 3: Visual results for a crop-outs of House,
corrupted with correlated noise (σ=35); (a) original image,
(b) noisy image, (c) NLM-C filtered image, (d) BM3D-C
filtered image, (e) BM3D filtered image, (f) proposed
technique filtered image.
This backs up our conjecture that strong
structured noise very much impairs block matching,
and that the solution proposed by Dabov et al.
(2008) for BM3D does not really solve the problem.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
132
On the contrary, using the pre-whitened image for
the block matching, the risk of patch mis-
classifications is reduced. In fact, plain BM3D with
prewhitening provides already a performance
comparable or superior to that of BM3D-C, see Table
1.
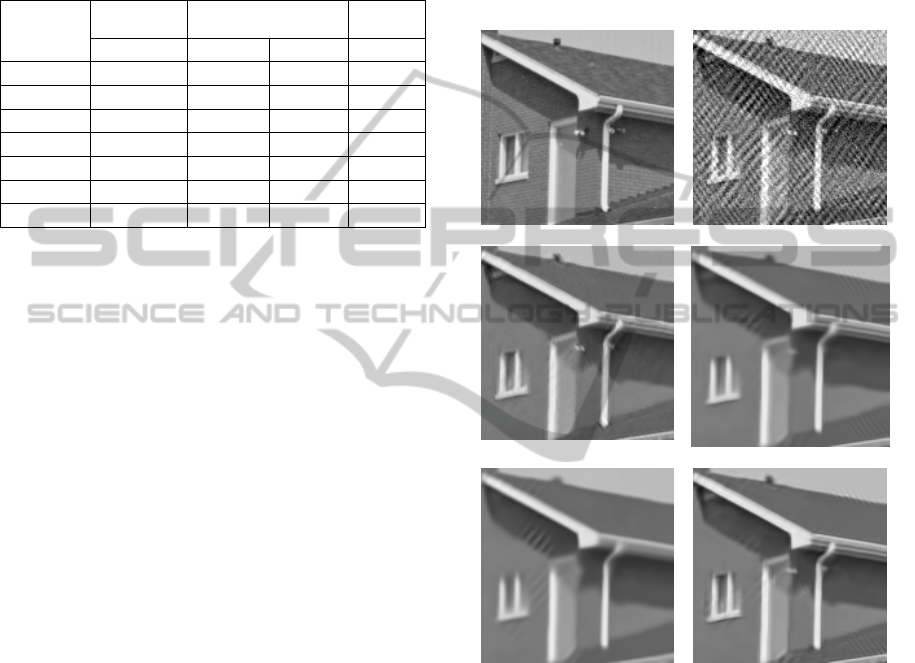
Table 1: PSNR results.
House (σ=35) House (σ=30)
Flinst.
(σ=40)
circular psd band pass stripes stripes
Noisy 17.25 18.59 18.59 16.09
NLM 26.68 28.51 26.67 22.51
BM3D 28.12 30.94 28.91 22.01
NLM-C 28.11 30.74 32.01 25.44
BM3D-C 28.77 31.44 30.78 23.63
BM3D/p.w. 28.50 31.38 31.04 24.23
Proposed
28.77 31.62 32.26 25.54
Our proposed version of BM3D, which includes
also improvements in the shrinkage phase and in the
variance estimation, turns out to work well with all
types of noise (unlike the reference techniques
which fail in one or another situations) and provides
consistently the best performance.
For example, the performance of NLM-C is good
on streaked noise, but not so much for granular
noise, even worse than BM3D developed in AWGN
hypotheses. This behaviour is probably due to noise
spectral characteristics. The whitening operation
before filtering is probably more “invasive” for band
pass noise than for other types, altering the
underlying signal characteristics, thereby reducing
the denoising effectiveness.
On the contrary, BM3D-C returns better results
for the band pass noise and only modest results for
streaked noise. Although suitable estimates of the
transform coefficient variances are used in block-
matching to reduce the influence of noisier
coefficients, the particular and repetitive pattern of
streaked noise strongly influences the block distance
measure. If the block matching is compromised, the
remaining filtering part is ineffective.
Cleverly combining the two approaches and
exploiting the two-step BM3D structure, the method
proposed in this work leads to robust results on all
types of correlated noise simulated.
The visual inspection of the filtered images from
Figure 1 to Figure 4 further reinforces the positive
judgement on the proposed algorithm. In addition to
the reference image and the noisy one, in Figure 1
and Figure 2 we show a visual comparison between
our technique and NLM-C, BM3D-C and NLM
developed for white noise, as suggested by Goossens
et al. (2008) in their work. In Figure 3 and
Figure 4,
instead, we have chosen BM3D as a comparison
technique developed for white noise, because it is
the basis of the technique for removing correlated
noise that we propose.
In any case, the proposed method removes most
of the noise, like the other colored-noise algorithms,
but presents a smaller number of ghost artifacts and
of generally lower intensity.
(a) Original (b) Noisy
(d) NLM-C (c) BM3D-C
(e) BM3D (f) Proposed
Figure 4: Visual results for a crop-outs of House,
corrupted with correlated noise (σ=30); (a) original image,
(b) noisy image, (c) NLM-C filtered image, (d) BM3D-C
filtered image, (e) BM3D filtered image, (f) proposed
technique filtered image.
4 CONCLUSIONS
Since noise is a primary cause of reduced image
analysis capability in many application fields, in this
work we focus on the problem of correlated noise
removal. To this regard, we introduce a modified
version of BM3D for correlated noise reduction, in
which three significant changes are introduced with
respect to the original algorithm. In particular, we
IMPROVED BM3D FOR CORRELATED NOISE REMOVAL
133

improve the block matching by resorting to image
prewhitening, and the shrinkage (hard thresholding
in the first step, and Wiener filtering in the second
step) by taking into account the different noise
variances of coefficients and by improving their
estimate.
This method turns out to be competitive both
with state of art nonlocal algorithm for colored noise
and with the original BM3D.
REFERENCES
Buades, A., Coll, B. and Morel, J. M., (2005). A Review
of Image Denoising Algorithms, with a New One.
Multiscale Modeling & Simulation, 4(2), 490-530.
Dabov, K., Foi, A., Katkovnik, V. and Egiazarian, K.,
(2007). Image denoising by sparse 3-D transform-
domain collaborative filtering. IEEE Transactions on
Image Processing, 16(8), 2080-95.
Dabov, K., Foi, A., Katkovnik, V. and Egiazarian, K.,
(2008). Image restoration by sparse 3D transform-
domain collaborative filtering. Proceedings of SPIE,
213462(213462), 681207-12.
Deledalle, C., Denis, L. and Tupin, F., (2009). Iterative
weighted maximum likelihood denoising with
probabilistic patch-based weights. IEEE Transactions
on Image Processing, 18(12), 2661-72.
Donoho, D. and Johnstone, J. M. (1994). Ideal spatial
adaptation by wavelet shrinkage. Biometrika, 81(3),
425-455.
Goossens, B. and Pizurica, A., (2009). Image denoising
using mixtures of projected Gaussian scale mixtures.
Image Processing, IEEE.
Goossens, B., Luong, Q., Pizurica, A. and Philips, W.,
(2008). An improved non-local denoising algorithm.
In 2008 Proc. Int. Workshop on Local and Non-Local
Approximation in Image Processing. 1026–3.
Parrilli, S., Poderico, M., Angelino, C. V. and Verdoliva,
L., (2012). A Nonlocal S AR Image Denoising
Algorithm Based on LLMMSE Wavelet Shrinkage.
IEEE Transactions on Geoscience and Remote
Sensing (99), 1–11.
Portilla, J., Strela, V., Wainwright, M. J. and Simoncelli,
E. P., (2003). Image denoising using scale mixtures of
Gaussians in the wavelet domain. IEEE transactions
on image processing, 12(11), 1338-51.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
134
