
OCCLUSION HANDLING FOR THE INTEGRATION
OF VIRTUAL OBJECTS INTO VIDEO
Kai Cordes, Bj
¨
orn Scheuermann, Bodo Rosenhahn and J
¨
orn Ostermann
Institut f
¨
ur Informationsverarbeitung (TNT), Leibniz Universit
¨
at Hannover
Appelstr. 9, 30167 Hannover, Germany
Keywords:
Structure and Motion Recovery, Foreground Segmentation, Feature Tracking, Augmented Reality.
Abstract:
This paper demonstrates how to effectively exploit occlusion and reappearance information of feature points
in structure and motion recovery from video. Due to temporary occlusion with foreground objects, feature
tracks discontinue. If these features reappear after their occlusion, they are connected to the correct previously
discontinued trajectory during sequential camera and scene estimation. The combination of optical flow for
features in consecutive frames and SIFT matching for the wide baseline feature connection provides accurate
and stable feature tracking. The knowledge of occluded parts of a connected feature track is used to feed a
segmentation algorithm which crops the foreground image regions automatically. The resulting segmentation
provides an important step in scene understanding which eases integration of virtual objects into video signif-
icantly. The presented approach enables the automatic occlusion of integrated virtual objects with foreground
regions of the video. Demonstrations show very realistic results in augmented reality.
1 INTRODUCTION
For the realistic integration of virtual objects into
video, a highly accurate estimation of the camera path
is crucial. State of the art techniques use a pinhole
camera model and image features for the camera mo-
tion estimation. The camera motion estimation work-
flow consists of feature detection, correspondence
analysis, outlier elimination, and bundle adjustment
as demonstrated in (Pollefeys et al., 2004), for exam-
ple.
Most techniques rely on feature correspondences
in consecutive frames. Thus, temporarily occluded
scene content causes broken trajectories. A reap-
pearing feature induces a new 3D object point which
adopts a different and therefore erroneous position.
Recent approaches solve this problem by incorpo-
rating non-consecutive feature correspondences (Cor-
nelis et al., 2004; Engels et al., 2008; Zhang et al.,
2010; Cordes et al., 2011). The additional correspon-
dences and their trajectories are used to stabilize the
bundle adjustment and improve the reconstruction re-
sults. The reconstructed object points of these feature
trajectories are not seen in several camera views. This
information has not been used for further scene under-
standing so far. In many cases, the rejoined trajecto-
ries discontinue because of occlusion with foreground
objects. We extract the reprojections of their object
points and evaluate if they are occluded in each of the
valid camera views.
We regard the occlusion and reappearance of
scene parts as valuable scene information. It can be
used to handle occlusions in video and result in a
meaningful foreground segmentation of the images.
This additional information eases the integration vir-
tual objects into video significantly.
A typical input example is shown in Figure 1, top
row. In this sequence, the background scene is tem-
porarily occluded by a part of the swing rack and
the swinging child. For the application of integrating
virtual objects into the video, the foreground objects
have to occlude the correct augmented image parts
throughout the sequence. This is essential to provide
realistic results. Otherwise the composed sequence
does not look satisfactory as shown in the bottom row
of Figure 1.
In literature, some approaches have been proposed
for occlusion handling in video. A comparable objec-
tive is followed in (Apostoloff and Fitzgibbon, 2006).
Occlusion edges are detected (Apostoloff and Fitzgib-
bon, 2005) and used for the video segmentation of
foreground objects. However, no 3D information of
the scene is incorporated and only edges of one fore-
ground object are extracted which is not advantageous
173
Cordes K., Scheuermann B., Rosenhahn B. and Ostermann J..
OCCLUSION HANDLING FOR THE INTEGRATION OF VIRTUAL OBJECTS INTO VIDEO.
DOI: 10.5220/0003856601730180
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 173-180
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: Playground sequence (1280 × 720 pixels), top row: example frames 11, 33, 44, 76 with temporarily occluded scene
content resulting from static and moving foreground objects. Feature trajectories discontinue and their features reappear after
being occluded. As shown in the bottom row, for integrating virtual objects, it is essential to handle foreground occlusions in
the composition of virtual and real scenes.
for the following image based segmentation. In (Guan
et al., 2007), the complete hull of occluded objects is
reconstructed. For this approach, video streams from
multiple, calibrated cameras are required in a shape
from silhouette based 3D reconstruction. In (Brox
and Malik, 2010), differently moving objects in the
video are clustered by analyzing point trajectories for
a long time. In this approach, a dense representa-
tion of the images is needed (Brox and Malik, 2011).
In (Sheikh et al., 2009), a sparse image representation
is used. The background trajectories span a subspace,
in which foreground trajectories are classified as out-
liers. The idea is to distinguish between camera in-
duced motion and object induced motion. These two
classes are used to build background and foreground
appearance models for the following image segmen-
tation. However, many foreground trajectories are re-
quired to provide a reliable segmentation result.
Our approach is designed for the integration of
virtual objects, and therefore can easily make use
of the extracted 3D information of the reconstructed
scene. It is not restricted to certain foreground ob-
ject classes and allows for arbitrary camera move-
ments. A very important step is the feature track-
ing. For the demanded accuracy, long and accurate
trajectories are desired. In contrast to (Brox and Ma-
lik, 2010; Liu et al., 2011), our approach relies on a
sparse representation of the images using reliable im-
age feature correspondences as required for the struc-
ture and motion estimation. We propose a combi-
nation of wide-baseline feature matching for feature
correspondences in non-consecutive frames and opti-
cal flow based tracking for frame to frame correspon-
dences. The resulting trajectories are incorporated in
an extended bundle adjustment optimization for the
camera estimation. The additional constraints lead
to an improved scene reconstruction (Zhang et al.,
2010; Cordes et al., 2011). We identify foreground
objects in the camera images as regions which oc-
clude already reconstructed scene content. Resulting
from the structure and motion recovery approach, re-
constructed scene content is represented by 3D ob-
ject points. In contrast to (Apostoloff and Fitzgib-
bon, 2006), this approach provides occlusion points
inside the foreground objects, which is very desirable
for the following segmentation procedure. The image
segmentation is obtained by efficiently minimizing an
energy function consisting of labeling and neighbor-
hood costs using a contracted graph (Scheuermann
and Rosenhahn, 2011). The algorithm is initialized
with the automatically extracted information about
foreground and background regions. The presented
approach eases the integration of virtual objects into
video significantly.
In the following Section 2, the structure and mo-
tion recovery approach is explained. Section 3 shows
the automatic detection of foreground regions using
correspondences in non-consecutive frames and their
object points. In Section 4, the application of integrat-
ing virtual objects into video is demonstrated. Section
5 shows experimental results on natural image data.
In Section 6, the paper is concluded.
2 STRUCTURE AND MOTION
RECOVERY
The objective of structure and motion recovery is
the simultaneous estimation of the camera parameters
and 3D object points of the observed scene (Pollefeys
et al., 2004). The camera parameters of one camera
are represented by the projection matrix A
k
for each
image I
k
, k ∈ [1 : K] for a sequence of K images.
For the estimation, corresponding feature points are
required. In case of video with small displacements
between two frames, feature tracking methods like
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
174
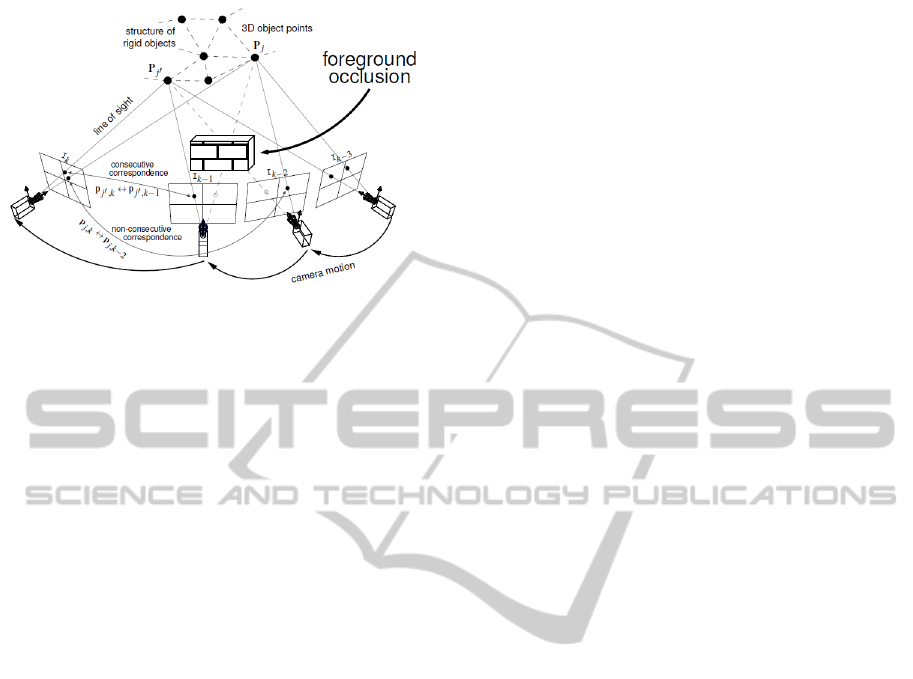
Figure 2: Common structure and motion estimation tech-
niques use corresponding feature points in consecutive im-
ages only, for example p
j
0
,k
↔ p
j
0
,k−1
. Due to foreground
occlusion, trajectories discontinue and the corresponding
scene content reappears in a later image. These trajectories
are connected using a wide-baseline correspondence anal-
ysis, for example p
j,k
↔ p
j,k−2
. A real world example is
shown in Figure 1.
KLT (Lucas and Kanade, 1981) tend to produce less
outliers and provide increased localization accuracy
compared to feature matching methods (Thorm
¨
ahlen
et al., 2010).
Methods as presented in (Engels et al., 2008;
Zhang et al., 2010; Cordes et al., 2011) addition-
ally make use of feature correspondences in non-
consecutive frames as shown in Figure 2 and therefore
increase the reconstruction reliability. This is espe-
cially important if scene content disappears and reap-
pears. This happens, if foreground objects temporar-
ily occlude the observed scene. It follows, that non-
consecutive correspondences induce occlusion infor-
mation which is explicitly used in our approach for
automatic foreground segmentation as explained in
Section 3. The developed feature tracking scheme is
presented in Section 2.1, and the bundle adjustment
scheme is shown in Section 2.2.
2.1 Feature Detection and Tracking
The presented feature tracking scheme is designed
for even large foreground occlusions while the cam-
era is moving freely. Hence, a wide baseline anal-
ysis is required for establishing correspondences in
non-consecutive frames. For a reliable feature match-
ing, the SIFT descriptor (Lowe, 2004) is used for
this task. Consequently, the feature selection uses the
scale space for the detection of interest points. For a
complete scene representation, the features in an im-
age should be spatially well-distributed. For the re-
sults shown in this paper, the SIFT detector is used
for newly appearing features and provides sufficiently
distributed points. For sequences with very low tex-
ture content, a combination of different scale invari-
ant feature detectors may be considered (Lowe, 2004;
Matas et al., 2002; Dickscheid et al., 2010). For the
tracking from frame to frame, the KLT tracker pro-
vides higher accuracy and less outliers than feature
matching techniques.
The tracking workflow is shown in Figure 3.
Newly detected SIFT features are tracked using
KLT. The KLT tracked features are validated with
RANSAC and the epipolar constraint. Inliers are used
for the bundle adjustment leading to the estimation
of the current camera A
k
as well as to an update of
the point cloud. Outliers and lost tracks which al-
ready have a valid object point are stored for a later
match with the possibly reappearing feature. To rep-
resent newly appearing and reappearing scene struc-
tures, SIFT features are detected, which are at first
compared to the stored discontinued trajectories. Val-
idation with RANSAC and the epipolar constraint be-
tween A
k
and A
k−l
, l > 1 result in non-consecutive
correspondences of the current frame I
k
. They are
used to stabilize the bundle adjustment and to extract
occlusion information leading to the automatic fore-
ground segmentation as explained in Section 3.
The combination of SIFT detection for newly ap-
pearing features, SIFT matching for non-consecutive
frames, and KLT tracking for frame to frame tracking
provides optimal performance for the presented oc-
clusion handling and accurate scene reconstruction.
2.2 Bundle Adjustment
The main idea of bundle adjustment (Triggs et al.,
2000) in structure and motion recovery approaches is
that a reprojected 3D object point P
j
should be lo-
cated at the measured feature point p
j,k
for each im-
age I
k
, in which P
j
is visible. The 3D-2D correspon-
dence of object and feature point is related by:
p
j,k
∼ A
k
P
j
(1)
where ∼ indicates that this is an equality up to scale.
The bundle adjustment equation to be minimized is:
ε =
J
∑
j=1
K
∑
k=1
d(p
j,k
, A
k
P
j
)
2
(2)
The covariance of the positional error which is de-
rived from the gradient images is incorporated in the
estimation (Hartley and Zisserman, 2003) using the
Mahalanobis distance for d(. . . ). The minimization
of equation (2) results in the final camera parameters
and object points.
OCCLUSION HANDLING FOR THE INTEGRATION OF VIRTUAL OBJECTS INTO VIDEO
175
Detect initial
Features (SIFT)
Detect new
Features (SIFT)
RANSAC
Consecutive
Correspondences
Discontinued
Trajectories
Correspondences
I
k+1
↔ I
k
(KLT)
Non-consecutive
Correspondences
Correspondences
I
k
↔ I
k−l
(SIFT)
RANSAC
k := k +1
Image I
k
, k := 0
outlier
inlier
Foreground
Regions
Foreground
Segmentation
Cameras
and Pointcloud
Bundle
Adjustment
occlusion
information
inlier
+
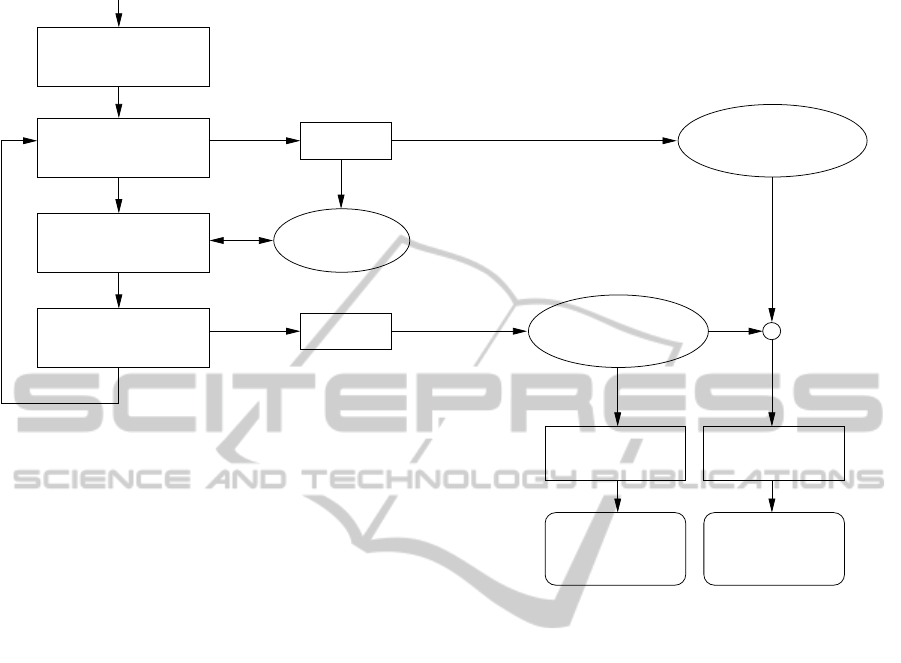
Figure 3: Workflow overview: features are tracked in consecutive frames by KLT while non-consecutive correspondences
are established using the SIFT descriptor. Features of the current frame I
k
are matched to features of previously discontinued
trajectories in the images I
k−l
, l = 2, . . . , L, L ≤ k. For validation, RANSAC and the epipolar constraint between I
k
and I
k−l
is used. The bundle adjustment is based on consecutive and non-consecutive correspondences. The occlusion information is
extracted from the non-consecutive correspondences and their trajectories. It is used to initialize the foreground segmentation
algorithm.
3 AUTOMATIC FOREGROUND
SEGMENTATION
The non-consecutive feature tracking connects dis-
continued trajectories to newly appearing features as
shown in Figure 2. If the trajectory is discontin-
ued because of an occlusion with foreground objects,
the image coordinates of occluded scene content can
be derived by reprojecting the corresponding recon-
structed object points. These image locations are used
to feed an interactive algorithm (Scheuermann and
Rosenhahn, 2011), which is designed to segment an
image into foreground and background regions with
the help of initially known representative parts, called
user strokes.
In (Scheuermann and Rosenhahn, 2011), the seg-
mentation is initialized with manually drawn user
strokes. In our work, the strokes are restricted to small
discs and created automatically using the extracted
occlusion information as explained in Section 3.1.
3.1 Occlusion Information
Let us assume, that foreground objects temporar-
ily occlude the background scene. Thus, non-
consecutive correspondences are established between
the last occurrence of the tracked and the reappear-
ing features after being occluded. By reprojecting
their 3D object points onto the image planes, oc-
cluded locations of these points can be measured. A
successfully established non-consecutive correspon-
dence p
j,k
↔ p
j,k−l−1
in the current frame I
k
is a part
of a feature trajectory t
∗
j
as follows:
t
∗
j
= (p
visible
j,k
, p
occluded
j,k−1
, . . . , p
occluded
j,k−l
, p
visible
j,k−l−1
, . . . )
The object point P
∗
j
of t
∗
j
is occluded in l frames. It
is visible in the current image I
k
and in some previ-
ous images I
j,k−l−1
, I
j,k−l−2
, . . . . It is occluded in the
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
176
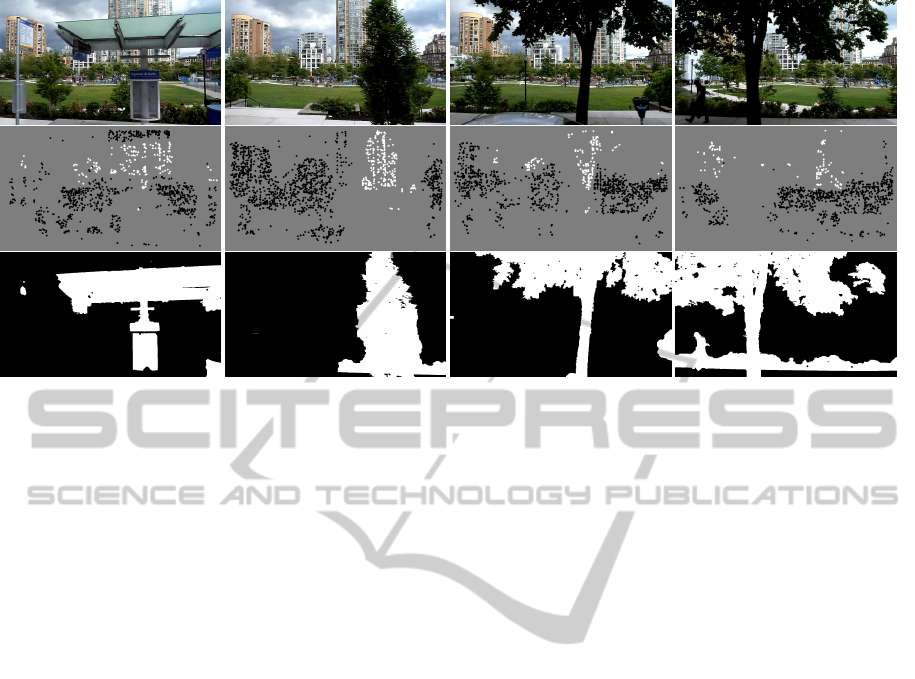
Figure 4: Foreground segmentation results of the Bus sequence (1280 × 720 pixels), top row: input sequence; center row:
occluded (white) and not occluded (black) object points; bottom row: automatic segmentation of foreground objects using the
occlusion information as initialization.
images I
k−1
, . . . , I
k−l
. The image location of the vis-
ible or not seen object point in each valid frame can
be estimated with relation (1) after selecting the scale
factor for the reconstruction.
To verify that the discontinued parts of a trajec-
tory t
∗
j
are occluded by foreground objects, a simi-
larity constraint between each point of the trajectory
and the current feature point p
visible
j,k
is evaluated. If
the similarity constraint is fulfilled, the object point is
visible in the camera view. Otherwise, the reprojec-
tion is an occluded image position. As similarity mea-
sure, the color histogram in a window around each re-
projection A
k−1
P
∗
j
, A
k−2
P
∗
j
, . . . is evaluated. This step
is important because non-consecutive feature corre-
spondences may also arise from ambiguities in the
image signal caused by repeated texture patterns or
image noise. In this case, the assumption that the
non-consecutive trajectory is discontinued because of
a foreground occlusion would be wrong.
The result of this procedure is shown in Figure
4, center row and Figure 5, top row, respectively.
The occluded image locations are visualized as white
discs, the visible locations of the non-consecutive cor-
respondences are black. The radius of a disc is set to
5 pel. These images provide the initialization for the
segmentation procedure as explained in Section 3.2.
3.2 Foreground Segmentation
The images containing the occlusion information
(Figure 4, center row) initialize an efficient image seg-
mentation algorithm (Scheuermann and Rosenhahn,
2011). This algorithm provides the segmentation as
the solution of the minimum cut / maximum flow
problem on a contracted graph. The minimum cut of
this graph minimizes the given energy function con-
sisting of a regional and a boundary term. The re-
gional term depends on regions that are assigned to
either foreground or background. This information
is usually given by the user marking foreground and
background with strokes.
In this paper no user interaction is needed since
the strokes are derived automatically as described in
Section 3.1. The result is the desired foreground seg-
mentation which is shown in Figure 4, bottom row
and Figure 5, center row, respectively.
4 OCCLUSION OF VIRTUAL
OBJECTS
An often used technique in movie production is the
integration of virtual objects into a video. This tech-
nique allows the editor for including scene content
that has not been there during image acquisition. The
required data for this step are accurate camera pa-
rameters and a coarse reconstruction of the scene.
This is the objective of structure and motion recov-
ery approaches. If the integrated virtual object has
to be occluded by real scene content, a segmentation
is required, which is usually done manually (Hillman
et al., 2010).
Our approach provides automatically segmented
foreground regions. These regions have two proper-
ties: (1) their scene content temporarily occludes the
background scene (see Section 3.1). (2) they are vi-
sually homogeneous (see Section 3.2). The resulting
OCCLUSION HANDLING FOR THE INTEGRATION OF VIRTUAL OBJECTS INTO VIDEO
177
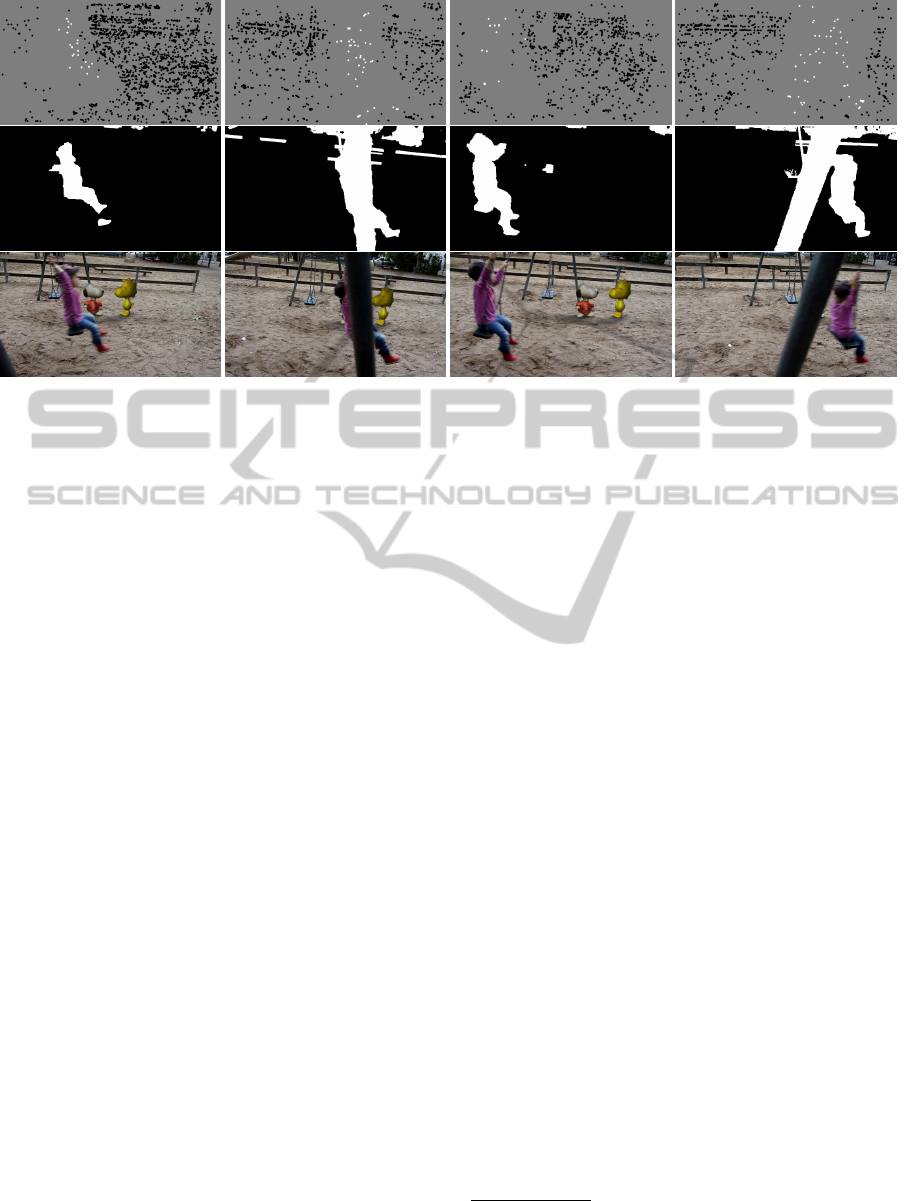
Figure 5: Result examples of Playground sequence from Figure 1: Top row: occluded (white) and not occluded (black) object
points. center row: segmentation of foreground objects as described in Section 3.1 which is needed for the composition of
real and virtual scenes; bottom row: final result of the integration of the virtual objects into the video sequence using the
composition of the input sequence from Figure 1, top row and the augmented sequence from Figure 1, bottom row.
segmentation as shown in Figure 4, bottom row, and
Figure 5, center row, is used in a compositing step for
the occlusion of the augmented objects. The white re-
gions are copied from the input, the black regions are
copied from the augmented sequence.
5 EXPERIMENTAL RESULTS
The presented approach of foreground segmentation
is tested using footage of a freely moving camera.
Two example sequences are demonstrated.
The first sequence (270 frames) is recorded from
a driving bus. Several foreground objects such as
trees, bushes, signs, and a bus station occlude the
background scene temporarily as shown in Figure 4,
top row. The center row of Figure 4 shows the ex-
tracted occlusion information. The white discs de-
pict foreground locations, the black ones are classified
as background locations as described in Section 3.1.
These images provide the initialization for the seg-
mentation algorithm (Section 3.2). As shown in the
bottom row, arbitrary and complex foreground object
are segmented successfully, for example the structure
of leaves of the trees.
The second sequence (120 frames) shows a play-
ground scene with a child on a swing. The foreground
objects are the swinging child and some parts of the
swing rack as shown in Figure 1, top row. The result-
ing sequences are demonstrated in Figure 5. The oc-
clusion information in the top row results from eval-
uating the non-consecutive correspondences. Again,
the white discs belong to the foreground and the black
discs belong to the background. These images ini-
tialize the segmentation algorithm, which leads to
the foreground segmentation result shown in the cen-
ter row. In the bottom row, the application of in-
tegrating virtual objects into the video sequence is
demonstrated. This sequence is the composition of
the rendered sequence from Figure 1, bottom row,
and the input sequence. The composition is done us-
ing the foreground segmentation result. The pixels
that are segmented as foreground regions (white pix-
els) are copied from the input sequence (Figure 1, top
row). while the black labeled background regions are
copied from the augmented sequence (Figure 1, bot-
tom row).
The swinging child as well as the parts of the
swing rack in the foreground are segmented reliably.
The integration and the occlusion of the virtual ob-
jects is convincing and looks realistic.
1
The computational expense for the evaluation of
the occlusion information is marginal. It consists of
reprojections of the object points P
∗
j
, histogram calcu-
lations of their surrounding windows, and the image
segmentation which is done in less than a second per
image.
5.1 Limitations
Although the foreground is segmented reliably, some
background regions are classified as foreground as
1
The video can be downloaded at: http://www.tnt.uni-
hannover.de/staff/cordes/
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
178

(a) (b)
Figure 6: Errors resulting from a misleading segmentation. (a): although there is no occlusion information in the fence, the
segmentation classifies it to the foreground because of its appearance being similar to the swing rack; (b): although the point
is correctly classified as foreground, it is isolated by the segmentation algorithm because of the strong motion blur of the
foreground object.
well because of their visual similarity. Figure 6 shows
two examples in detail. On the left, a small part of the
fence which belongs to the background occlude the
augmented objects because of a misleading segmenta-
tion. Here, the fence is visually very similar to the part
of the swing rack which is a foreground region. On
the right, the segmentation algorithm assigns a small
part of the child to the background, although it has
attached a correctly classified foreground disc. This
is due to the strong motion blur. In these cases, the
segmentation algorithm leads to suboptimal solutions.
As these errors appear for an isolated frame only, we
expect to solve this problem by incorporating tempo-
ral constraints into the segmentation algorithm which
is left for future works. Even in the erroneous frames,
the presented approach provides a meaningful initial
solution within a few seconds which can easily be re-
fined by adding a few user strokes and restarting the
segmentation procedure. Note, that the results pre-
sented in this paper are fully automatic.
6 CONCLUSIONS
The presented approach provides the automatic han-
dling of foreground occlusions designed for the ap-
plication of integrating virtual objects into video. It
is demonstrated that the required information for seg-
menting the foreground regions can be extracted from
discontinued feature trajectories and their 3D object
points. The information is extracted in a correspon-
dence analysis step for non-consecutive frames. This
technique is required for image sequences, in which
foreground objects temporarily occlude large parts of
the scene.
The presented feature tracking combines the
highly accurate and reliable KLT tracker for corre-
spondences in consecutive frames with wide-baseline
SIFT correspondences for non-consecutive frames.
The localization of occluded and not occluded scene
content is gained from the reprojection of object
points onto the camera planes. This data is success-
fully used as initialization of an efficient segmenta-
tion algorithm which results in visually homogeneous
foreground regions. The resulting segmentation is
used for the composition of virtual and real scenes.
The effectiveness of the approach is demonstrated
in two challenging image sequences. Virtual ob-
ject are accurately integrated and their occlusion with
foreground objects is convincing. The proposed ap-
proach provides an additional step in scene under-
standing using feature based structure and motion re-
covery.
REFERENCES
Apostoloff, N. E. and Fitzgibbon, A. W. (2005). Learn-
ing spatiotemporal t-junctions for occlusion detection.
In IEEE Conference on Computer Vision and Pattern
Recognition (CVPR), volume 2, pages 553–559.
Apostoloff, N. E. and Fitzgibbon, A. W. (2006). Automatic
video segmentation using spatiotemporal t-junctions.
In British Machine Vision Conference (BMVC).
Brox, T. and Malik, J. (2010). Object segmentation by long
term analysis of point trajectories. In Daniilidis, K.,
Maragos, P., and Paragios, N., editors, European Con-
ference on Computer Vision (ECCV), volume 6315
of Lecture Notes in Computer Science (LNCS), pages
282–295. Springer.
Brox, T. and Malik, J. (2011). Large displacement optical
flow: Descriptor matching in variational motion esti-
mation. IEEE Transactions on Pattern Analysis and
Machine Intelligence (PAMI), 33(3):500 –513.
Cordes, K., M
¨
uller, O., Rosenhahn, B., and Ostermann, J.
(2011). Feature trajectory retrieval with application
to accurate structure and motion recovery. In Bebis,
G., editor, Advances in Visual Computing, 7th Inter-
national Symposium (ISVC), Lecture Notes in Com-
puter Science (LNCS), volume 6938, pages 156–167.
Springer.
Cornelis, K., Verbiest, F., and Van Gool, L. (2004). Drift de-
tection and removal for sequential structure from mo-
tion algorithms. IEEE Transactions on Pattern Anal-
ysis and Machine Intelligence (PAMI), 26(10):1249–
1259.
OCCLUSION HANDLING FOR THE INTEGRATION OF VIRTUAL OBJECTS INTO VIDEO
179

Dickscheid, T., Schindler, F., and F
¨
orstner, W. (2010). Cod-
ing images with local features. International Journal
of Computer Vision (IJCV), 94(2):1–21.
Engels, C., Fraundorfer, F., and Nist
´
er, D. (2008). Inte-
gration of tracked and recognized features for locally
and globally robust structure from motion. In VISAPP
(Workshop on Robot Perception), pages 13–22.
Guan, L., Franco, J.-S., and Pollefeys, M. (2007). 3d oc-
clusion inference from silhouette cues. In IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1 –8.
Hartley, R. I. and Zisserman, A. (2003). Multiple View Ge-
ometry. Cambridge University Press, second edition.
Hillman, P., Lewis, J., Sylwan, S., and Winquist, E. (2010).
Issues in adapting research algorithms to stereoscopic
visual effects. In IEEE International Conference on
Image Processing (ICIP), pages 17 –20.
Liu, C., Yuen, J., and Torralba, A. (2011). Sift flow:
Dense correspondence across scenes and its applica-
tions. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence (PAMI), 33(5):978 –994.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision (IJCV), 60(2):91–110.
Lucas, B. and Kanade, T. (1981). An iterative image regis-
tration technique with an application to stereo vision.
In International Joint Conference on Artificial Intelli-
gence (IJCAI), pages 674–679.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2002). Ro-
bust wide baseline stereo from maximally stable ex-
tremal regions. In British Machine Vision Conference
(BMVC), volume 1, pages 384–393.
Pollefeys, M., Gool, L. V. V., Vergauwen, M., Verbiest,
F., Cornelis, K., Tops, J., and Koch, R. (2004). Vi-
sual modeling with a hand-held camera. International
Journal of Computer Vision (IJCV), 59(3):207–232.
Scheuermann, B. and Rosenhahn, B. (2011). Slimcuts:
Graphcuts for high resolution images using graph re-
duction. In Boykov, Y., Kahl, F., Lempitsky, V. S., and
Schmidt, F. R., editors, Energy Minimization Methods
in Computer Vision and Pattern Recognition (EMM-
CVPR), volume 6819 of Lecture Notes in Computer
Science (LNCS). Springer.
Sheikh, Y., Javed, O., and Kanade, T. (2009). Background
subtraction for freely moving cameras. In IEEE Inter-
national Conference on Computer Vision and Pattern
Recognition (ICCV), pages 1219–1225.
Thorm
¨
ahlen, T., Hasler, N., Wand, M., and Seidel, H.-
P. (2010). Registration of sub-sequence and multi-
camera reconstructions for camera motion estimation.
Journal of Virtual Reality and Broadcasting, 7(2).
Triggs, B., McLauchlan, P. F., Hartley, R. I., and Fitzgibbon,
A. W. (2000). Bundle adjustment - a modern synthe-
sis. In Proceedings of the International Workshop on
Vision Algorithms: Theory and Practice, IEEE Inter-
national Conference on Computer Vision and Pattern
Recognition (ICCV), pages 298–372. Springer.
Zhang, G., Dong, Z., Jia, J., Wong, T.-T., and Bao, H.
(2010). Efficient non-consecutive feature tracking for
structure-from-motion. In Daniilidis, K., Maragos,
P., and Paragios, N., editors, European Conference
on Computer Vision (ECCV), volume 6315 of Lecture
Notes in Computer Science (LNCS), pages 422–435.
Springer.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
180
