
A NONLINEAR FEATURE FUSION BY VARIADIC NEURAL
NETWORK IN SALIENCY-BASED VISUAL ATTENTION
Zahra Kouchaki
1
and Ali Motie Nasrabadi
2
1
Department of Biomedical Engineering, Science and Research Branch, Islamic Azad University, Tehran, Iran
2
Department of Biomedical Engineering, Shahed University, Tehran, Iran
Keywords: Saliency Map, Visual Attention, Nonlinear Fusion, Neural Network, Object Detection.
Abstract: This study presents a novel combinational visual attention system which applies both bottom-up and top-
down information. This can be employed in further processing such as object detection and recognition
purpose. This biologically-plausible model uses nonlinear fusion of feature maps instead of simple
superposition by employing a specific Artificial Neural Network (ANN) as combination operator. After
extracting 42 feature maps by Itti’s model, they are weighed purposefully through several training images
with their corresponding target masks to highlight the target in the final saliency map. In fact, the weights of
42 feature maps are proportional to their influence on finding target in the final saliency map. The lack of
bottom-up information is compensated by applying top-down information with available target masks. Our
model could automatically detect the conceptual features of desired object only by considering the target
information. We have tried to model the process of combining 42 feature maps to form saliency map by
applying the neural network which resembles biological neural network. The Experimental results and
comparing our model with the basic saliency model using 32 images of test dataset indicate a noticeable
improvement in finding target in the first hit.
1 INTRODUCTION
AND RELATED WORKS
One of the effective abilities of the human is visual
attention system which directs the human vision to
the most intersecting parts of a scene. These parts
are called salient regions and their saliencies are
corresponding to how much attention can focus on
them. When we don’t have special goal, the low-
level visual features could attract our attention which
then will be sent in higher cognitive areas for further
processing such as object recognition. However,
attention is also dependent on top-down features
such as prior knowledge which is extracted from
higher brain areas. Both bottom-up and top-down
cues contribute in directing attention toward the
most salient points. Selective visual attention has so
many applications in computer vision such as
automatic target detection, navigational aids and
robotic control (Itti and Koch, 2001). Till now, many
computational models of visual attention are
proposed which simulate human visual attention
based on bottom-up information. In terms of
psychology, Treisman and Gelade (1980) proposed
the theory of feature integration in visual attention
which is the basic theory for the most bottom-up
models such as (Itti, Koch, and Niebur, 1998 ),
(Koch and Ulman, 1985), (Sun and Fisher, 2003). In
all these models, bottom-up low-level cues such as
color, intensity and orientation could detect salient
points by their contrast. As it is proved
psychologically, top-down information is also
effective in directing low-level visual cues toward
salient regions (Wolfe, 1994). Some scientist has
studied on top-down visual attention recently
(Wolfe, 1994), (Navalpakam, Rebesco and Itti,
2005), (Frintrop, 2006). All of the mentioned models
of bottom-up and top-down visual attention have
applied linear fusion of feature maps which does not
seem plausible biologically. Although some
scientists have studied in the way of combining
feature maps (Itti and Koch, 2001), (Walter, Itti,
Riesenhuber, Poggio and koch, 2002), most of them
have employed linear fusion of feature maps. In (Itti
and Koch, 2001), four different approaches of fusion
of feature maps were presented. Among the four
strategies, the approach of linear combination with
learned weights had the best performance in finding
the target. However, it is still a linear fusion and also
457
Kouchaki Z. and Motie Nasrabadi A..
A NONLINEAR FEATURE FUSION BY VARIADIC NEURAL NETWORK IN SALIENCY-BASED VISUAL ATTENTION.
DOI: 10.5220/0003859204570461
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 457-461
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

all the features obtain positive weights even if they
may erode visual attention. As we have shown in our
previous work, nonlinear fusion of feature maps
sounds more reasonable biologically. In (Kouchaki,
Nasrabadi and Maghooli, 2011), we proposed a
novel nonlinear feature fusion strategy to fuse three
conspicuity maps through Fuzzy Interface System
which had better results in comparison with the
basic saliency model in detecting desired object.
However, it combines three conspicuity maps rather
than 42 feature maps that could be more effective.
Moreover, in (Bahmani, Nasrabadi, Hashemi
Golpayegani, 2008), a combinational approach of
multiplicative weighted feature maps was proposed
which multiply 42 feature maps after weighing them
purposefully as in (Itti and Koch, 2001). Although a
remarkable improvement was achieved, the simplest
nonlinear function was employed. Unquestionably,
the real biological system of visual attention is more
complicated than a simple multiplication. In this
study, we have tried to indicate the biological
process of consisting saliency map through 42
feature maps. In order to select a nonlinear function,
which could show the details of creating saliency
map from 42 feature maps more reasonably, we
thought of Artificial Neural Network (ANN) as it
considerably resembles the biological neural
network.
After extracting 42 feature maps by Itti’s model
(Itti et al, 1998), we applied them as the inputs of the
network. The 42 feature maps were weighed
automatically through training process by
considering target masks as the desired output of the
network. In fact, we compensated the lack of
bottom-up information with considering target
information as top-down cues to adjust desired
weights.
The rest of this paper is as follows. In section 2,
we discuss about the basic bottom-up model of
visual attention. Then we present our methodology
in section 3. The details of the Variadic Neural
Network structure will be discussed in section 4.
Section 5 presents the details of our proposed model.
Experimental results are discussed in section 6.
Finally, section 7 concludes the paper.
2 THE BASIC BOTTOM-UP
MODEL
This part discuss about the details of computing the
bottom-up saliency map which proposed by Itti et al
(1998). Whereas an image is placed at the input of
the Itti’s model, it is filtered by a low-pass filter.
After low pass filtering, different spatial scales are
generated in three different channels of colour,
intensity and orientation by Dyadic Gaussian
Pyramids. These Gaussian Pyramids subsample the
input colour image in different scales. After that, the
feature maps are constructed in three different
channels of colour, intensity and orientation with
“centre-surround “operation. Subtraction between
fine and coarse scales images, which is a point-by-
point subtraction, yields 42 feature maps that consist
of 12 colors, 6 intensities and 24 orientation maps.
All the feature maps in each channel are linearly
fused into a conspicuity map which finally leads to
three conspicuity maps. Each conspicuity map is an
indication for one of the three features. After linear
combination of three conspicuity maps, the final
saliency map is formed which is based on the
bottom-up cues.
3 METHODOLOGY
In this study we want to promote some of the
computational weaknesses of the bottom-up visual
attention models for the object detection purpose. In
this study, we thought of designing a nonlinear
fusion kernel for combining 42 feature maps which
can indicate the biological details of forming
saliency map. Furthermore, the feature maps should
be weighed purposefully to be fit for object
detection purpose (Walther, 2006). As a result, we
assumed that Artificial Neural Network could be a
good choice for nonlinear fusion of 42 feature maps
as it resembles biological neural network. However,
in the beginning, combination of 42 images with the
big size through neural network seemed impossible
due to having 42 huge sized images as the inputs to
the network. But, finally, we found the Variadic
Neural Network (McGregor, 2007
), as a suitable
network which could meet our needs in this respect
due to accepting n-dimensional vectors as its inputs.
The top-down information could be considered in
the model by training the network using available
target masks. The supervised neural network could
be trained using the target information to weigh the
42 feature maps purposefully. As we know,
searching the desired object which is known
previously for the viewer is easier and faster than
searching it without prior knowledge. As we know,
one of the important factors for modelling the
human visual attention is considering the learning
ability. We have considered this matter with training
the network. The proposed visual attention structure
is illustrated in Figure 1. As shown, after deriving 42
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
458
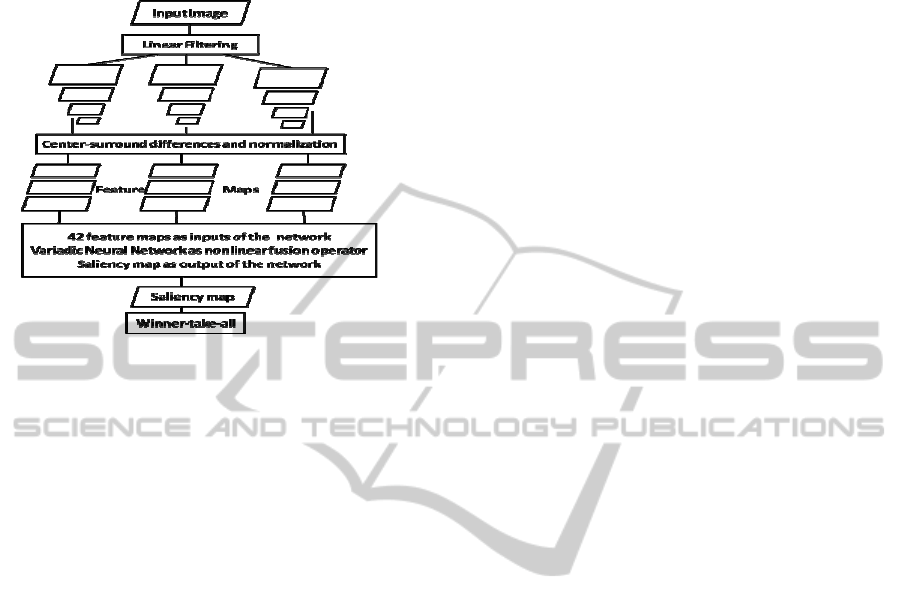
feature maps by Itti’s model (Itti et al, 1998), they
are considered as the inputs of the network and the
output of the network is the final saliency map.
Figure 1: The proposed visual attention structure using
Variadic Neural Network (Itti et al, 1998).
4 VARIADIC NEURAL
NETWORK STRUCTURE
Variadic Neural Network (VNN) structure which is
extracted from multi-layer perceptron architecture
was suggested by McGregor in 2007
. The inputs of
the network are vectors of the same length with
arbitrary dimension. The number of parameters in
the network and its architecture do not vary by
changing the dimension of the input’s vectors. There
are variadic links which connect two variadic
neurons. The inputs and outputs of a link are vectors
which their sizes are optional. There are two link
parameters. The multiplicative weight parameter (w)
is the same as the weight parameter in the traditional
feed-forward network. But there is also an
interaction-weight parameter (θ) which causes the
interaction between different elements of an input
vector. In the Variadic Neural Network (VNN)
structure, the inputs to the neuron are the vectors of
real numbers instead of real scalar in the traditional
network. The variadic neuron sums the variadic
inputs to generate vector activation. After adding the
bias to the vector activation and passing through the
hyperbolic tangent functions, the variadic output of
the neuron will be obtained. More details could be
seen in (McGregor, 2007
).
5 MODEL
As it is illustrated in Figure 1, in the first stage of
our proposed model, 42 feature maps are extracted
using Itti’s model (Itti et al, 1998). Since the inputs
of the network in the Variadic Neural Network are
n-dimensional vectors, we should change the
training images to the training vectors. So, after
extracting 42 feature maps with the size of (30×40)
pixels from each 32 training images, we should
change them to 32 vectors of 1200-dimentional. In
addition, 32 target masks with the size of (640×480)
pixels corresponding to the training dataset should
be resized to (30×40) pixels and then to the vectors
of 1200-dimentional to be acceptable for placing as
desired output of the network. The same process
should be done for the test dataset except for the
target masks. The test process does not need the
target mask. As illustrated in Figure 1, two stage
process of generating saliency map incorporates to
one-stage nonlinear combination process by
applying the neural network. Three parameters of
(w, θ, B) were weighed after training the network.
The weights of the network parameters are in
direction of highlighting the target in the final
saliency map. We can use these obtained weights for
the application of object detection in cluttered
scenes. These weights effectively indicate the
influence of each feature map to find our target in
the final saliency maps. The trained network is
capable of finding the target (emergency triangle) in
the test images containing the emergency triangle
with arbitrary background. After entering a test
image to our proposed model, first, the bottom-up
cues are derived and then will be sent to the
network. Here, the network acts such as higher brain
area which compensate the lack of information about
the target.
6 EXPERIMENTAL RESULTS
6.1 Database and Parameters
Image datasets are from Itti’s lab at USC. This
dataset consists of 64 images of emergency triangle
with natural environment background. The 32
images with available target masks are applied as
training dataset. Another 32 images of emergency
triangle without target mask are utilized as the
testing dataset.
The results presented here are based on the batch
mode training using the RPROP algorithm
(Riedmiller and Braun, 1992), which is a fast
second-order gradient method. The RPROP
algorithm parameters were as follows: η0 = 0.0001,
η− = 0.5, η+ =1.2, ∆
min
= 10−8, ∆
max
= 50. We
A NONLINEAR FEATURE FUSION BY VARIADIC NEURAL NETWORK IN SALIENCY-BASED VISUAL
ATTENTION
459

initialized bias, weight and interaction-weight
parameters with a normal distribution with zero
mean and the variance was inversely proportional to
the node fan-in. It should be noted that the
multiplicative weight parameter w, is multiplied with
each image. But there is also an interaction-weight
parameter θ which allows the interaction between
different pixels of a feature map. The network was
selected with 42 inputs of 1200-dimentional, a
hidden layer with 6 nodes and one output of 1200-
dimentional in the output layer. We trained the
network for 4000 epochs when the error did not
change any more. After training, (42×6) weights (w)
and (42×6) interaction-weights (θ) parameters were
obtained which connect the 42 inputs to the 6
neurons of hidden layer. In addition, (6×1) weights
(w) and (6×1) interaction-weights parameters were
generated which connect the 6 neurons of hidden
layer to the one neuron of the output layer. The
value of these parameters can represent the influence
of each feature map on the final saliency map.
6.2 The Results of Implementing
the Algorithm
As could be observed in the Figure 2, two samples
of 32 images of test dataset are illustrated on the left
side and their corresponding saliency map is shown
on the right side. In our strategy, each saliency map
is generated as the output of the network after
nonlinear fusion of 42 feature maps by the trained
network. As shown in Figure 2 for two images, our
model founded emergency triangle in the first hit in
the 28 images of the 32 test images which is a
remarkable result. The model could not find the
target in the first hit just in four images that are
shown in Figure 3. As shown in Figure 3, the target
is detected in the fifth, second, third and sixth hit in
the Figures.3.a, b, c, and d, respectively.
Figure 2: Left: Two samples of test images; Right:
saliency maps corresponding to the left column images
using our proposed method.
6.3 Comparison of Two Models
We have proved the effectiveness of our model with
comparing our nonlinear fusion approach using
neural network with the simple superposition in the
basic saliency-based visual attention model with the
same test dataset. As could be seen in Table 1, we
defined four parameters of No of FHD, No of UST,
Mean and Standard Deviation (STD) for comparing
the two mentioned models. The number of first hit
detection (No of FHD) demonstrates the number of
trials in which the model could detect the target in
the first hit without any mistakes. The number of
unsuccessful trials (No of UST) is the number of
trials which the model could not detect the target
before five hit .After distinguishing the first point,
the next salient point are detected by Inhibition of
Return (IOR) process. As illustrated in Table 1, our
method detects the target in 28 images of 32 test
images. Our model could not detect the target before
five executions just in one image which is shown in
Figure 3.d. So, we had one unsuccessful trail (UST)
based on our parameter definition. However, in Itti’s
model we found five unsuccessful (UST) trails.
Moreover, two parameters of Mean and STD were
employed to compare two models. These parameters
demonstrate the average mean and standard
deviation of false detections before finding the target
in 32 images of test dataset. It is completely evident
that our nonlinear fusion method has remarkable
improvement in comparison with the basic saliency
model. On top of that, the value of weights after
training could be employed for the detection and
recognition of emergency triangle in every arbitrary
image. Another point is that, the network could be
trained for any arbitrary dataset. When our images
are more complicated than this database, we may
need more number of training images to train the
network. Although the training process is
complicated and time consuming, after training and
obtaining the efficient weights, these weights can be
utilized to obtain the target. Furthermore, for other
training patterns and other target, the training
parameters and the number of neurons in hidden
layer could be changed.
Table 1: Comparison of two models.
Fusion methods
No. of
FHD
No. of
UST
Mean STD
Simple superposition 9 5 2.18 2.32
neural network 28 1 0.34 1.09
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
460

a
b
c d
Figure 3: The images in which the model could not find
the target in the first hit.
7 CONCLUSIONS
The proposed combinational structure applies both
bottom-up and top-down information to detect the
pre-learned objects. After extracting bottom-up
features by Itti’s model, they then will be sent to the
variadic neural network as its input. The supervised
variadic network was trained through several
training images with their corresponding target
masks and suitable parameters are weighed
purposefully to highlight the target. The amounts of
parameters indicate the influence of each feature
map in finding the target on the final saliency map.
Hence, the neural network can simultaneously weigh
the feature maps and fuse them nonlinearly which is
more convincing biologically. The noticeable
improvement in first hit detection was achieved
which is desirable for object detection purpose. As a
future work, we wish to implement our model with
other database and also propose a model for multiple
object detection.
REFERENCES
Bahmani, H., Nasrabadi, A. M., and Hashemi
Gholpayegani, M. R. (2008). Nonlinear data fusion in
saliency-based visual attention, 4
th
International IEEE
Conference in Intelligent System.
Frintrop, S. (2006). VOCUS: A Visual Attention System
for Object Detection and Goal-directed Search, LNAI,
3899, Springer Berlin/Heidelberg. ISBN: 3-540-
32759-2.
Itti, L. and Koch, C. (2001). Computational modeling of
visual attention, Nature Reviews Neuroscience, 2(3),
194–203.
Itti, L., Koch, C., and Niebur, E. (1998). A model of
saliency-based visual attention for rapid scene
analysis, IEEE Trans PAMI, 20(11), 1254–1259.
Itti, L., and Koch, C. (2001). Feature combination
strategies for saliency-based visual attention systems,
Journal of Electronic Imaging, 10(1), 161–169.
Kouchaki, Z., Nasrabadi, A. M., Maghooli, K. (2011). An
improved model of saliency-based visual attention
using fuzzy interface system, The 6
th
International
conference on computer science and convergence
information technology, 204-207.
McGregor, S. (2007). Neural network processing for multi
set data”. In Proc. Artificial neural networks —
ICANN2007, 17th international conference, 4668,
460–470.
Navalpakam, V., Rebesco, J. and Itti, L. (2005). Modeling
the influence of task on attention, Vision Research,
45(2), 205–231.
Riedmiller M. and Braun, H. (1992). RPROP — A fast
adaptive learning algorithm, technical report,
Universitat Karlsruhe.
Sun, Y. and Fisher, R. (2003). Object-based visual
attention for computer vision, Artificial Intelligence,
146(1), 77–123.
Treisman, A. M. and Gelade, G. A. (1980). A feature
integration theory of attention, Cognitive Psychology,
12, 97–136.
Wolfe, J. (1994). A revised model of visual search,
Psyconomic Bulletin Review, 1(2), 202–238.
Walter, D. Itti, L., Riesenhuber, M., Poggio T., and koch,
C. (2002). Attentional selection for object recognition-
A gentle way, LNCS, 25, 472–279
Walther, D. (2006). Interactions of visual attention and
object recognition, PhD Thesis, California Institute of
Technology.
A NONLINEAR FEATURE FUSION BY VARIADIC NEURAL NETWORK IN SALIENCY-BASED VISUAL
ATTENTION
461
