
ORTHOGONAL SIMPLIFICATION OF OBJECTS REPRESENTED
BY THE EXTREME VERTEX MODEL
Irving Cruz-Mat
´
ıas
1
and Dolors Ayala
1,2
1
Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
2
Institut de Bioenginyeria de Catalunya, Barcelona, Spain
Keywords:
Simplification, LOD, Bounding Volumes, Orthogonal Polyhedra, Binary Volumes.
Abstract:
This work presents a new approach to simplify objects. It is restricted to orthogonal pseudo-polyhedra (OPP)
and binary volumes. The method produces a level-of-detail (LOD) sequence of OPP and it is incremental. Any
object in this sequence is a bounding OPP of the previous objects. The sequence finishes with the minimum
axis-aligned bounding box. OPP are represented by the Extreme Vertices Model. Simplification is achieved
using a new approach called merging faces that relies on the application of 2D Boolean operations.
1 INTRODUCTION
The large size and complexity of models often af-
fects the computation speed-up of their characteris-
tics. Simplification techniques can diminish this prob-
lem. Moreover, in some cases it is advantageous to
exchange an exact geometric representation of an ob-
ject for an approximated one, which can be processed
more efficiently. Bounding structures are a widely
used specific typology of model simplification to ac-
celerate tasks as collision detection, distance compu-
tation or any basic set membership operation.
We present a new approach to simplify objects.
It is restricted to OPP and therefore it can be ap-
plied to binary volumes or 3D images represented
by OPP. From an initial OPP, the method computes
a LOD sequence of bounding volumes that are also
OPP. The sequence ends with a convex OPP that is
the axis-aligned minimum bounding box (AABB) of
all the sequence. We will denote as BOPP (bounding
OPP) such bounding structures. All the BOPP of se-
quence satisfy two important characteristics required
for bounding structures: (1) any object contains the
previous one and (2) all of them, as well as the
original object, have the same AABB. In this work,
OPP are represented by the Extreme Vertices Model
(EVM), a complete model that stores a subset of their
vertices (called extreme vertices) and performs fast
Boolean operations. The simplification is achieved
using a new approach called merging faces that relies
on the application of 2D Boolean operations over the
OPP faces, which are orthogonal pseudo-polygons.
2 RELATED WORK
There has been an extensive research on methods
for model simplification, recent works are based on
quadrilateral meshes (Tarini et al., 2010), as well as
methods for LOD sequences of triangular and tetra-
hedral meshes (Ripolles et al., 2009). In contrast to
these methods that rely on geometric operations, sim-
plification can follow other strategies like morpholog-
ical operators as filleting and rounding (Williams and
Rossignac, 2007). Alternative representations can be
used as octrees (Vanderhyde and Szymczak, 2008) in
such a way that the geometry as well as the topology
can be simplified, or BSP (Huang and Wang, 2010)
obtaining a LOD sequence with a decreasing number
of nodes. Simplification strategies have also been de-
veloped for B-Rep models (Sun et al., 2010), and for
point clouds (Pauly et al., 2002).
In some cases it is desirable to compute an ap-
proximation that is also a bounding volume. Bound-
ing volumes are used in many applications as collision
detection, ray tracing (Wald et al., 2007), graphics in-
teraction (Jim
´
enez et al., 2011) and volume of inter-
est computation (Fuchs et al., 2010). Works concern-
ing bounding volumes use the most classical ones, as
spheres (Gagvani and Silver, 2000) and AABB (Zach-
mann, 2002), or hybrid bounding volumes (Chang
et al., 2010).
The so-called vertex representation (Esperanc¸a
and Samet, 1998) is used to represent orthogonal
polyhedra that are used as bounding structures and
a 2D simplification method based on this model has
193
Cruz-Matías I. and Ayala D..
ORTHOGONAL SIMPLIFICATION OF OBJECTS REPRESENTED BY THE EXTREME VERTEX MODEL.
DOI: 10.5220/0003861301930196
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 193-196
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

also been devised (Esperanc¸a and Samet, 1997). Our
method has the similarity with this one that orthog-
onal faces are displaced, but our strategy and opera-
tions are completely new. We merge the faces geome-
try by applying Boolean operations. Moreover our ap-
proach deals with general 3D orthogonal objects with
any number of shells, cavities and through holes.
3 EXTREME VERTICES MODEL
The EVM is a very concise representation scheme in
which any OPP can be described using only a subset
of its vertices: the extreme vertices (EV). The EVM
can be created easily from the voxel model. Let Q
be a finite set of points in E
3
. The ABC-sorted set
of Q is the set resulting from sorting Q according to
A, then to B, and then to C-coordinate. Let P be an
OPP: A brink is the maximal uninterrupted segment
built out of a sequence of collinear and contiguous
two-manifold edges of P and its ending vertices are
the EV. A cut (C) of P is the set of EV lying on a
plane perpendicular to a main axis of P. A slice is the
prismatic region between two consecutive cuts, and a
section (S) is its base polygon. Sections can be com-
puted from cuts and vice versa. For i = 1 . . . n :
S
0
(P) = S
n
(P) =
/
0, S
i
(P) = S
i−1
(P) ⊗
∗
C
i
(P) (1)
C
i
(P) = S
i−1
(P) ⊗
∗
S
i
(P) (2)
where n is the number of cuts and ⊗
∗
denotes the reg-
ularized xor operation. The overline symbolizes the
project operator, that from a d-dimensional set of ver-
tices lying on a plane produces a (d-1)-dimensional
set of vertices. As the ⊗
∗
operation can be expressed
as union of differences, Equation 2 can be written as:
C
i
(P) = (S
i−1
(P)−
∗
S
i
(P))∪ (S
i
(P)−
∗
S
i−1
(P)) (3)
and any cut can be decomposed into its forward dif-
ference (FD) and backward difference (BD):
FD
i
(P) = S
i−1
(P) −
∗
S
i
(P) (4)
BD
i
(P) = S
i
(P) −
∗
S
i−1
(P)
FD
i
(P) is the set of C
i
(P) faces whose normal vec-
tor points to the positive side of the coordinate axis
perpendicular to C
i
(P) and BD
i
(P) the opposite. Fig-
ure 2(b) shows an object with all its EV, cuts (C
1
to
C
4
) and sections (in yellow). Arrows on cuts indicate
whether they are FD or BD.
There is a platform that uses the EVM for most
volume operations, as it is efficient for Boolean op-
erations. All Boolean operations are carried out by
applying recursively the same operation over the 2D
OPP sections. The base case performs this operation
in 1D. The xor operation is the faster one, as it is a
simple point-wise xor without section computation.
For details concerning EVM see (Aguilera, 1998).
4 ALGORITHM OVERVIEW
Our method takes as input an EVM represented OPP.
Let B(P) be the BOPP of an OPP P, and o
0
be the
initial object. A finite sequence o
1
, o
2
, . . . , o
p
of OPP
is generated that follows the following properties:
1. Subset property: B(o
i
) = o
i+1
, i = 0. . . p −1, and,
therefore, o
i
⊆ o
i+1
, i = 0 . . . p − 1
2. o
p
= AABB(o
i
), i = 0 . . . p
It is an incremental approach, i.e., we compute o
i+1
from o
i
, i = 0 . . . p −1. The main idea follows a merg-
ing faces strategy. Cuts in an ABC-sorted EVM are
perpendicular to A-coordinate axis. If cut faces are
displaced towards the contiguous cut and both sets of
faces are merged, the total number of vertices (EV and
non-EV) will never increase. So, the simplification al-
gorithm receives an EVM P, which corresponds to the
initial object o
0
and the desired maximum number of
EV n in the simplified model, and returns an EVM
Q corresponding to the BOPP o
k
, which has no more
than n EV. The method computes all the o
i
between 1
and k, where the merging faces strategy applies a dis-
placement of d = i voxels to compute o
i
. Therefore,
to compute o
k
the algorithm performs k iterations.
The merging faces process is applied to the current
ABC-sorting of P that only coarsens the OPP in the A-
coordinate, then it is necessary to repeat the process
for the other two main directions. So, we can take any
three sortings with different A-coordinate, as shown in
the following pseudocode:
EVM Simplification(EVM P, int n){
EVM Q = P;
for(int d=1; Q->Get_nev() >= n; d++){
Q->SetSorting(XYZ); Q=mergingFaces(Q,d);
Q->SetSorting(YXZ); Q=mergingFaces(Q,d);
Q->SetSorting(ZXY); Q=mergingFaces(Q,d);}
return Q; }
Get nev returns the number of EV of the correspond-
ing object. The mergingFaces function receives an
EVM object and a distance d, and returns another
EVM object, where consecutive cuts with distance
<= d between them have been processed. When
n = 8 the algorithm finishes with the AABB.
5 MERGING FACES APPROACH
Given the ABC-sorted EVM representation of an
OPP, pairs of consecutive cuts along the A-coordinate
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
194
axis are extracted and processed with a sequential
scan. Let C
A
and C
B
be two consecutive cuts and FD
A
,
BD
A
, FD
B
and BD
B
their corresponding forward and
backward differences. A coarser OPP is achieved by
displacing BD
B
to the position of BD
A
, and, similarly,
displacing FD
A
to the position of FD
B
. Since the
displacement is done in the direction of the respec-
tive normal vectors, and it is restricted by the cuts of
the initial object, the model will never extend beyond
these cuts. Thus, this process satisfies the subset prop-
erty. So, the merging process performs the union of
those faces with normal vector in the same direction
that belong to two consecutive cuts, i.e.:
newC
A
= BD
A
∪
∗
BD
B
, newC
B
= FD
A
∪
∗
FD
B
(5)
where newC
A
and newC
B
are the pair of cuts that re-
place C
A
and C
B
respectively. Now, for objects with
cavities, Equation 5 is not enough. For example, ap-
plying this equation to the object in Figure 1, the same
OPP without any coarsening is obtained. In order to
deal with this case, the void space must be detected
with the expression:
vSpace(C
A
,C
B
) = FD
A
∩
∗
BD
B
(6)
as BD
A
and BD
B
are sets of faces whose normal vector
points to the opposite direction of FD
A
and FD
B
, but
only FD
A
and BD
B
contribute to form a void space
between the cuts. If a void space is detected, it must
be removed from newC
A
and newC
B
in order to close
it. Then, combining Equation 5 with Equation 6:
newC
A
= (BD
A
∪
∗
BD
B
) −
∗
(FD
A
∩
∗
BD
B
) (7)
newC
B
= (FD
A
∪
∗
FD
B
) −
∗
(FD
A
∩
∗
BD
B
)
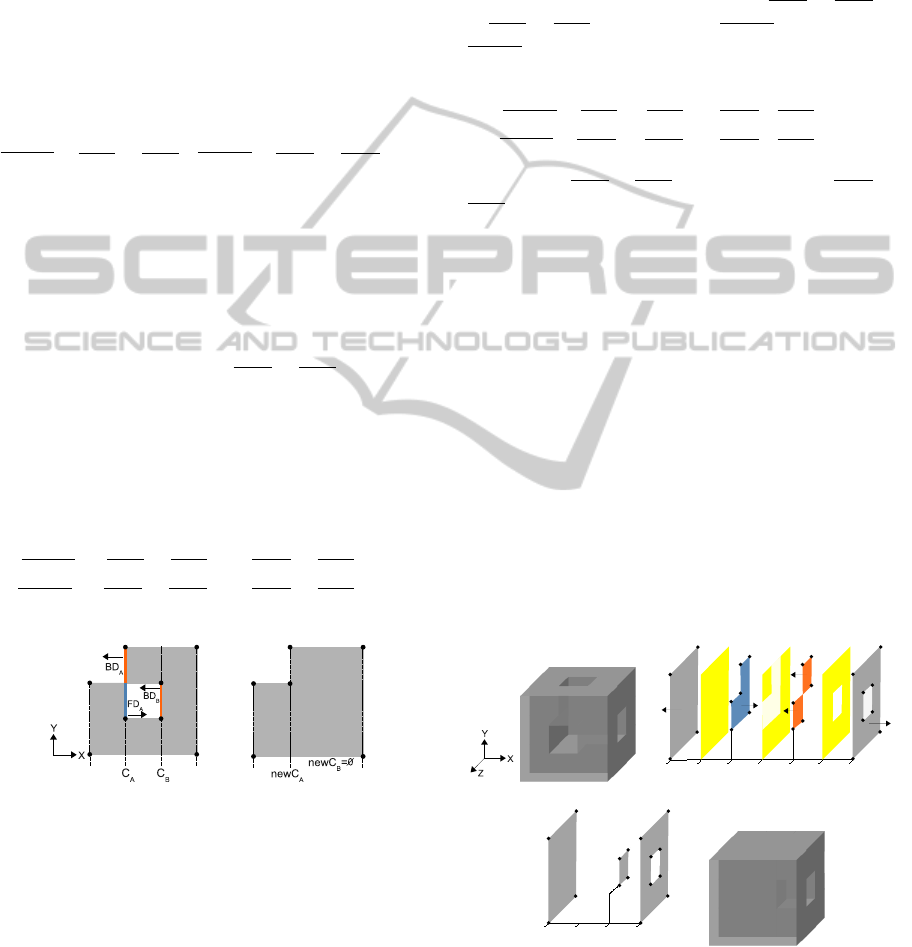
Figure 1: 2D example with a single hole. Left: faces to be
displaced in order to close the hole. Right: resulting BOPP.
Figure 2 shows a 3D example where applying
Equation 8, newC
A
=
/
0 and newC
B
gets a new value
(see Figure 2(c)), which partially closes the hole. The
result of this process is an object with a concavity (see
Figure 2(d)), which will be closed in the next sweep.
As this last operation contributes just to close void
spaces, it guaranties the subset property. Now, there
are two EVM properties that make possible to per-
form unions and differences as simple point-wise xor
operations (Aguilera, 1998).
• P1: Let P and Q be two OPP such that P ∩ Q =
/
0, having evm(P) and evm(Q) as their respective
models, then evm(P ∪ Q) = evm(P) ⊗ evm(Q).
• P2: Let P and Q be two OPP such that P ⊇ Q,
with evm(P) and evm(Q) as their respective mod-
els, then evm(P − Q) = evm(P) ⊗ evm(Q).
According to these properties and as FD
A
∩
∗
FD
B
=
/
0, BD
A
∩
∗
BD
B
=
/
0, vSpace ⊆ newC
A
and vSpace ⊆
newC
B
, Equation 7 can be rewritten in order to be
faster to compute as:
newC
A
= BD
A
⊗
∗
BD
B
⊗
∗
(FD
A
∩ BD
B
) (8)
newC
B
= FD
A
⊗
∗
FD
B
⊗
∗
(FD
A
∩ BD
B
)
In Figure 1, FD
A
= BD
B
, vSpace(C
A
,C
B
) = FD
A
=
BD
B
. Then, applying Equation 8, newC
A
= BD
A
,
newC
B
=
/
0 and the hole is closed.
Observe the Figure 2(b), where if C
A
= C
1
and
C
B
= C
2
, newC
A
and newC
B
will be exactly the same
as C
A
and C
B
respectively. This happens when FD
A
=
BD
B
=
/
0, which is the condition to establish that there
are no faces to be displaced to get a coarser model.
In these cases, C
1
is omitted and copied to the re-
sulting model. On the other hand, the merging faces
function process only those pairs of cuts with distance
<= d. Formally, given the pair (C
A
= C
i
,C
B
= C
i+1
),
if FD
A
= BD
B
=
/
0, or distance(C
A
,C
B
) > d, then C
i
is
copied to the resulting BOPP, and the method contin-
ues with the pair (C
A
= C
i+1
,C
B
= C
i+2
). In the other
case, the pair (C
A
,C
B
) is processed with Equation 8.
The merging faces process takes cuts in pairs:
(C
A
= C
i
,C
B
= C
i+1
), i = 1, i < n − 1, i = i + 2, i.e.
first the pair (C
1
,C
2
), then (C
3
,C
4
), and so on.
(a)
C
1
C
A
=C
2
C
4
C
B
=C
3
S
1
S
2
S
3
(b)
C
1
newC
A
=
C
4
∅
newC
B
(c) (d)
Figure 2: A 3D OPP with holes. (a) Original object. (b)
EVM encoding (EV, cuts and sections), where cuts C
2
and
C
3
are the sets of faces to be displaced in a first step. (c)
Resulting cuts and (d) object after applying Equation 8.
ORTHOGONAL SIMPLIFICATION OF OBJECTS REPRESENTED BY THE EXTREME VERTEX MODEL
195
6 EXPERIMENTAL RESULTS
We have tested the merging faces method in several
cases. Table 1 shows a compilation of some models
with their corresponding size, the maximum d in or-
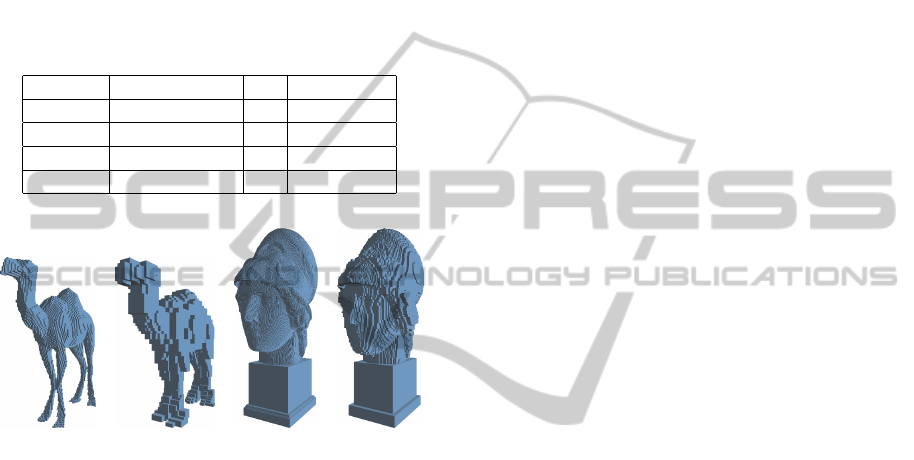
der to get the AABB and time to get it. Figure 3 de-
picts some results of simplifying two models, both de-
picted BOPP have less than 10% of EV of the original
model. The algorithm was executed on a PC Intel(R)
Pentium(R) CPU 3.20GHz with 3.2Gb of RAM.
Table 1: Information of some models used in the experi-
ments. Size in voxels; d: max value to get AABB
Model Size d Time (sec)
Binzilla 83x35x58 35 0.41
Camel 39x125x127 34 1.20
Venus 148x148x512 33 16.24
Athene 350x195x512 64 17.69
Figure 3: Some results. From left to right: Original
(12,602 EV) and BOOP (1,148 EV) of Camel model, origi-
nal (179,400 EV) and BOPP (15,100 EV) of Athene model.
7 CONCLUSIONS
We have described an approach for orthogonal sim-
plification of models represented by the EVM, which
is based on the application of efficient Boolean opera-
tions. Our approach deals with OPP with any number
of holes and connected components, and computes a
LOD sequence of BOPP. This sequence satisfies com-
mon properties of bounding structures. Directions for
future work include the design of alternatives where
individual faces of FD and BD are taken into account.
We also plan to study a lossless simplification ap-
proach based on the presented one.
ACKNOWLEDGEMENTS
This work was partially supported by the national
project TIN2008-02903 of the Spanish government. I.
Cruz-Mat
´
ıas acknowledges the MAEC-AECID grant
from the Spanish government.
REFERENCES
Aguilera, A. (1998). Orthogonal Polyhedra: Study and Ap-
plication. PhD thesis, Univ. Polit
`
ecnica de Catalunya.
Chang, J.-W., Wang, W., and Kim, M.-S. (2010). Efficient
collision detection using a dual obb-sphere bounding
volume hierarchy. Com.-Aided Design, 42(1):50 – 57.
Esperanc¸a, C. and Samet, H. (1997). Orthogonal polygons
as bounding structures in filter-refine query processing
strategies. In Advances in Spatial Databases Fifth Int.
Symposium, pages 197–220. Springer Verlag.
Esperanc¸a, C. and Samet, H. (1998). Vertex representations
and their applications in computer graphics. The Vi-
sual Computer, 14:240–256.
Fuchs, R., Welker, V., and Hornegger, J. (2010). Non-
convex polyhedral volume of interest selection. Jour-
nal of Computerized Medical Imaging and Graphics,
34(2):105–113.
Gagvani, N. and Silver, D. (2000). Shape-based volumetric
collision detection. In VVS’00: of the 2000 IEEE sym-
posium on Volume visualization, pages 57–61, New
York, NY, USA. ACM Press.
Huang, P. and Wang, C. (2010). Volume and complexity
bounded simplification of solid model represented by
binary space partition. In Proc. - 14th ACM Symp. on
Solid and Physical Modeling, pages 177–182.
Jim
´
enez, J. J., Feito, F. R., and Segura, R. J. (2011). Tetra-
trees properties in graphic interaction. Graphical
Models, 73(5):182 – 201.
Pauly, M., Gross, M., and Kobbelt, L. P. (2002). Efficient
simplification of point-sampled surfaces. In Proc. of
the IEEE Visualization Conference, pages 163–170.
Ripolles, O., Chover, M., Gumbau, J., Ramos, F., and Puig-
Centelles, A. (2009). Rendering continuous level-of-
detail meshes by masking strips. Graphical Models,
71(5):184–195.
Sun, R., Gao, S., and Zhao, W. (2010). An approach to b-
rep model simplification based on region suppression.
Computers & Graphics, 34(5):556 – 564.
Tarini, M., Pietroni, N., Cignoni, P., Panozzo, D., and
Puppo, E. (2010). Practical quad mesh simplifica-
tion. Computer Graphics Forum (Special Issue of Eu-
rographics 2010 Conference), 29(2):407–418.
Vanderhyde, J. and Szymczak, A. (2008). Topological sim-
plification of isosurfaces in volume data using octrees.
Graphical Models, 70:16 – 31.
Wald, I., Boulos, S., and Shirley, P. (2007). Ray tracing
deformable scenes using dynamic bounding volume
hierarchies. ACM Trans. Graph., 26.
Williams, J. and Rossignac, J. (2007). Tightening: Morpho-
logical simplification. International Journal of Com-
putational Geometry & Applications, 17(5):487–503.
Zachmann, G. (2002). Minimal hierarchical collision detec-
tion. In Proceedings of the ACM symposium on Vir-
tual reality software and technology, VRST ’02, pages
121–128, New York, NY, USA. ACM.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
196
