
FULLY-DISTRIBUTED DEBUGGING AND VISUALIZATION
OF DISTRIBUTED SYSTEMS IN ANONYMOUS NETWORKS
C´edric Aguerre, Thomas Morsellino and Mohamed Mosbah
LaBRI, CNRS, Universit´e de Bordeaux 351, Cours de la Lib´eration, 33405 Talence, France
Keywords:
Distributed Algorithm, Visualization, Debugging, Anonymous Network, Snapshot, Global Predicate Evalua-
tion.
Abstract:
The debugging of distributed algorithms is a major challenge which greatly benefits from the help of an in-
teractive and informative human-computer interface. In this paper we present ViSiDiA, a platform for the
visualization, simulation and debugging of distributed algorithms. Our approach respects real-life constraints
such as process anonymity and privacy, network synchronicity. We propose a new fully-distributed method
for the debugging and monitoring of distributed systems, based on the computation of global states and global
predicates from local information in anonymous and asynchronous networks. We show how the debug infor-
mation can be visualized concurrently with the algorithm execution.
1 INTRODUCTION
The analysis and understanding of distributed algo-
rithms involved in complex information systems are
fundamental. These algorithms must be proved, im-
plemented, debugged and tested in a context where
several processes collaborate to the execution of a
same task. Main issues concern concurrent access to
resources, critical failure detection, or even process
communication strategy.
In recent years, several tools help in assessing the
question of simulation and visualization of distributed
algorithms (Moses et al., 1998; Stasko and Kraemer,
1993; Koldehofe et al., 2003; Ben-Ari, 2001; Carr
et al., 2003; Pongor, 1993; Chang, 1999). Most of
them consider that processes have unique identifiers
or have particular knowledge on the network. How-
ever in large and heterogeneous networks, processes
may not have unique identifiers or may not wish to di-
vulge them for privacy reasons (Guerraoui and Rup-
pert, 2005). We thus focus on fully-distributeddebug-
ging issues in anonymous networks.
In this paper, we expose a new design of ViSiDiA,
a tool for simulating and visualizing distributed algo-
rithms. We add debugging features in both simulation
and visualization parts. We are interested in a way of
visualizing debug information along with algorithm
execution, and we present our theoretical approachfor
debugging.
2 THE VISIDIA PLATFORM
Concept. ViSiDiA
1
(Visualization and Simulation
of Distributed Algorithms) is a tool aiming at simu-
lating and visualizing the execution of distributed al-
gorithms (Bauderon et al., 2001; Derbel and Mosbah,
2003; Bauderon and Mosbah, 2003), used as an edu-
cational and research utility.
Distributed networks can be defined using an edi-
tor in ViSiDiA. Algorithms are run along with a visu-
alization which respects events sequencing. The user
can interact with the network whilst the simulation ex-
ecutes. This all makes it possible to study algorithms,
to detect errors or to compute complexity.
ViSiDiA encompasses a simulation core, a Graph-
ical User Interface (GUI), and an Application Pro-
gramming Interface (API) to implement distributed
algorithms thanks to a set of simple primitives.
Illustrative Example. For the sake of clarity, we
here illustrate visual components using a standard
Broadcast algorithm applied to a small distributed
network with a message passing model (Yamashita
and Kameda, 1996). The network is modeled as
a graph, whose nodes and edges correspond to au-
tonomous processes and to communication links, re-
spectively. The graph is such that one node is la-
beled A, all the others being labeled N. We call X-
1
http://visidia.labri.fr
764
Aguerre C., Morsellino T. and Mosbah M..
FULLY-DISTRIBUTED DEBUGGING AND VISUALIZATION OF DISTRIBUTED SYSTEMS IN ANONYMOUS NETWORKS.
DOI: 10.5220/0003861807640767
In Proceedings of the International Conference on Computer Graphics Theory and Applications (IVAPP-2012), pages 764-767
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
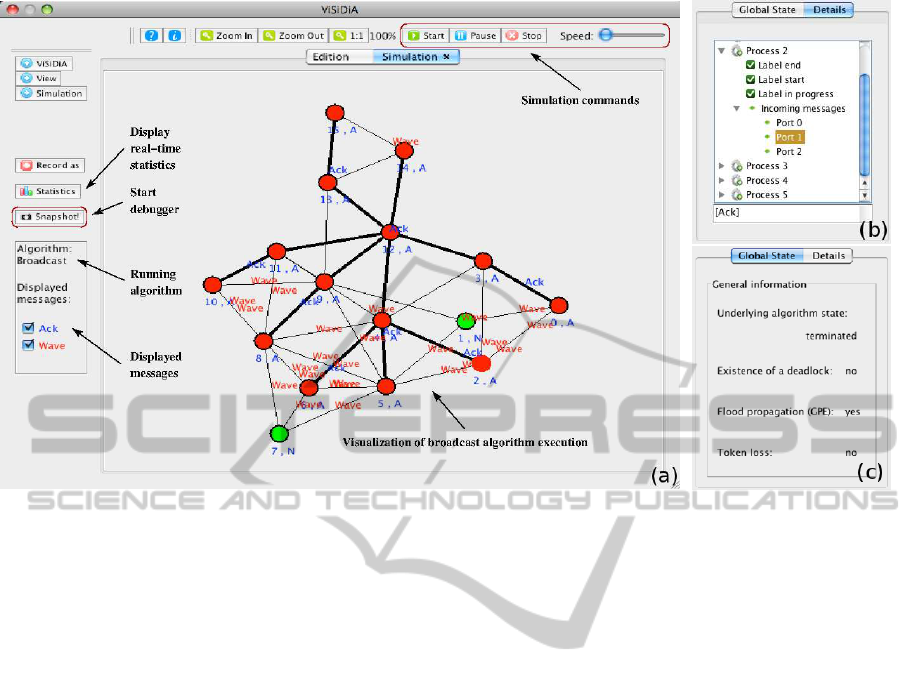
Figure 1: Overview of the visual interface. (a): Settings are accessible on top and left panels. Algorithm executes on the
network. The user can observe changes on node and edge states, as well as transiting messages. A button on left panel
launches the debugger. (b-c): Debugging results displayed during algorithm execution. (b): monitoring process 2 with the
state of its incoming channels. (c): some evaluated predicates such as algorithm termination.
node a node with label X.
The algorithm is then the following. At any time,
each A-node sends a message to each of its neighbors,
and each N-node receiving a message changes its la-
bel to A and propagates the message to its neighbors.
When a message is delivered, the edge between the
sender and the receiver takes a special marked state.
The algorithm terminates when no N-nodes re-
main. All marked edges and connected nodes form
a spanning tree of the initial graph.
Visual Semantics. Nodes are circles whose inner
part represents a label according to a user-modifiable
color palette. In Figure 1(a), inner parts of A-nodes
and N-nodes are filled with red and green, respec-
tively. A node outer part indicates if the node is se-
lected (red) or not (black). Below a node appear its
properties: an id, a label, or any user-defined value.
The user controls which information is displayed.
Edges are line segments, or arrows if they are
oriented. Default visualization uses thin black lines.
Thick lines indicate marked edges. A selected edge is
red, additional colors representing user-defined states.
Other properties, if any, appear close to the edge.
Messages are textual information sliding from a
sender node to a receiver node. Different colors are
used according to the message types defined by the
running algorithm. In the case of Broadcast algo-
rithm, there are wave messages (in red) and acknowl-
edgements (in blue). The user can switch on and off
message display during the simulation.
Dynamic changes in color, position and thickness
of graph elements give an instantaneous global per-
ception of the running algorithm. To access local
or detailed information, simulation speed can be ad-
justed or the simulation can be paused, edge/node
properties can be modified, the message display can
be adapted to fit user requirements.
The Simulation Core. A node owns an au-
tonomousthread which only operates on its own prop-
erties and its connected edges. As the network is
anonymous each process holds a copy of the simu-
lated algorithm.
A unique simulation console manages requests
from processes. For example a process can ask it for
sending a message. The console is then responsible
for delivering the message, pushing it into the receiver
FIFO-based mailbox. An event/acknowledgement
system ensures the order of requests.
2.1 Monitoring and Debugging Feature
Message Passing. Consider a distributed system in
which a process crashes: the corresponding thread
is deadlocked, whereas its neighbors are still waiting
FULLY-DISTRIBUTED DEBUGGING AND VISUALIZATION OF DISTRIBUTED SYSTEMS IN ANONYMOUS
NETWORKS
765
for its termination. We want our debugger to propa-
gate the information “a neighbor has crashed”. As the
debugging operator cannot be the deadlocked thread
itself, we associate to each process a second thread
used for debugging.
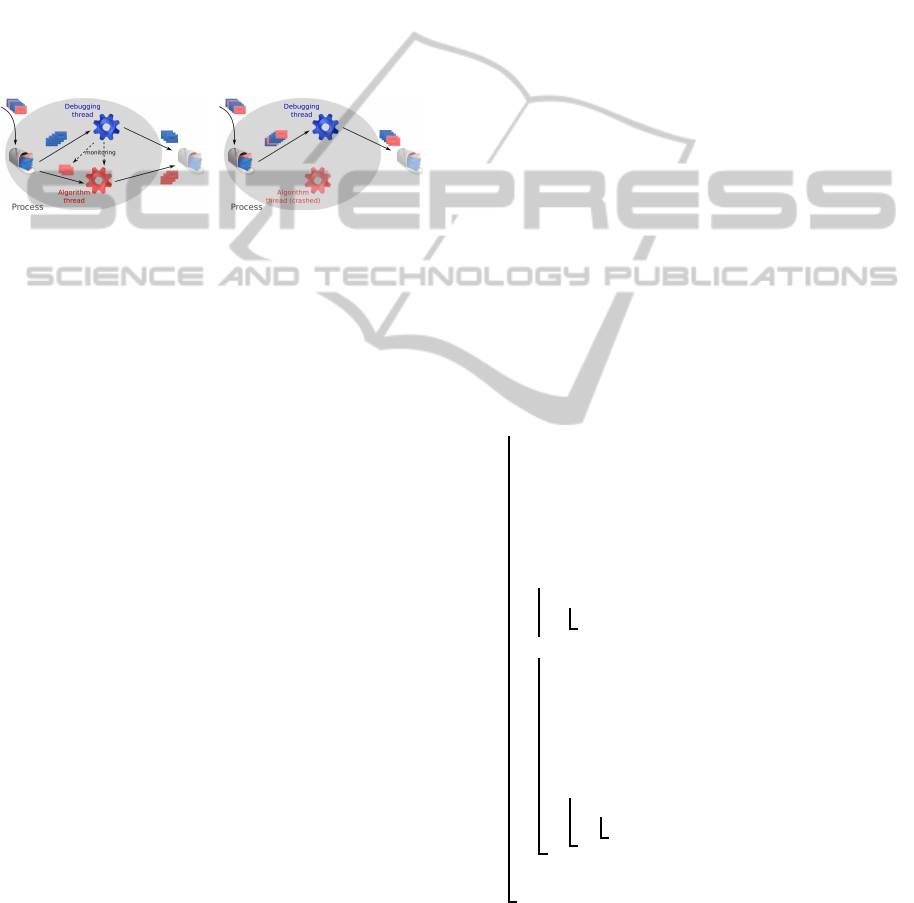
A process owns two threads: one for algorithm ex-
ecution, the other for debugging. In the console now
transit both execution and debug messages. A process
distributes each message according to its type to the
appropriate thread. The debugging thread monitors
both the algorithm thread and its incoming messages.
If the algorithm fails, all messages are processed by
the debugging thread (Figure 2).
Figure 2: Message passing at process scale. A process con-
tains a mailbox and two threads: one for algorithm execu-
tion, the other for debugging. Left: In normal case, mes-
sages are routed according to their type. Right: If the algo-
rithm crashes, the debugging thread takes over.
Visual Components. The ViSiDiA graphical inter-
face contains a button to launch the debugger during
an algorithm execution. Debug information shows up
as a tree view for processes and incoming channels
(Figure 1(b)), and some evaluated global predicates
are listed in another panel (Figure 1(c)). This infor-
mation can also be visualized when the mouse hovers
over a node. See Section 3 for details on debug infor-
mation nature.
API Extension. Debugging features have been
added to the ViSiDiA API. Algorithm developers can
thus monitor the value of specified variables and test
if a global predicate occurs, just adding a few lines
of code. In the case of Broadcast (Algorithm 1), we
follow changes in the value of processes label (regis-
terVariable method). We have created a global pred-
icate sp and we tell the debugger to use it (addGlob-
alPredicate method). Finally, we want a feedback on
algorithm termination (setTerminated method).
3 DEBUGGING ALGORITHMS
A debugger needs network snapshots, composed of
both processes and communication channels states.
Such global snapshots are computed using only local
information processes exchange. These snapshots are
then exploited to evaluate global predicates (GP, for
short), i.e., properties which remain true as soon as
they are verified (Tel, 2000). The main motivation for
GP evaluation is to react against particular situations
which can occur in distributed systems.
Our solution (Chalopin et al., 2011) is a com-
bination of the Chandy-Lamport algorithm (Chandy
and Lamport, 1985) with an algorithm by Szymanski,
Shy, and Prywes (Szymanski et al., 1985) to compute
snapshots and to evaluate GP anonymously.
Computing Snapshots. The Chandy-Lamport al-
gorithm determines global snapshots in which each
process has computed its local snapshot within fi-
nite time. Once local snapshots are computed, this
knowledge is fully distributed over the system then
exploited by processes. From this knowledge, one can
simulate a global clock (Raynal, 1988), nevertheless
it does not enable iterated computation of snapshots.
Another way to exploit this knowledge is based on
wave algorithms: a message is passed to each process
by a single initiator according to the network topology
(Matocha and Camp, 1998). These solutions are not
available in the context of anonymous networks with
no distinguished processes and no particular knowl-
edge on the topology.
begin
static
Message
wave = new
Message
(”Wave”, true);
static
Message
ack = new
Message
(”Ack”, true, Color.blue);
int arity =
getArity
();
String label =
getProperty
(”label”);
registerVariable
(”labelstart”, label);
addGlobalPredicate
(sp);
if label.compareTo(”A”) == 0 then
for neighbor = 0 to arity-1 do
sendTo
(neighbor, Broadcast.wave);
else
Door
door =
receiveMessage
();
int doorNum = door.
getNum
();
sendTo
(doorNum, Broadcast.ack);
putProperty
(”label”, new String(”A”));
registerVariable
(”labelin progress”, label);
setDoorState
(new
MarkedState
(true), doorNum);
for neighbor = 0 to arity-1 do
if neighbor != doorNum then
sendTo
(neighbor, Broadcast.wave);
registerVariable
(”labelend”, label);
setTerminated
(true);
Algorithm 1: Example of a Broadcast algorithm written
in Java using the ViSiDiA API. In black, the algorithm as
written without any debug procedure. In blue, the only 5
lines of code needed to enable debugging this algorithm
on the visual interface.
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
766

Termination of the Chandy-Lamport Algorithm:
Checkpoints. The algorithm by Szymanski, Shy,
and Prywes (the SSP algorithm, for short) detects
when each process has reached its termination condi-
tion. Running both the Chandy-Lamport and the SSP
algorithms, each process can thus locally and anony-
mously detect when all processes have computed their
local snapshot.
This algorithms combination gives us a funda-
mental debugging feature: it defines checkpoints for
the distributed algorithm of interest. First in case of
system failure, the computation can be restarted from
the last valid checkpoint. Second our debugger can
offer step-by-step forward and rewind functionalities.
Global Predicates. From execution checkpoints,
we can run once again the SSP algorithm to evaluate
GP (graph invariants). The most obvious predicate is
the termination detection of the monitored algorithm.
Hence, in ViSiDiA we obtain a semi automatic de-
bugging; user control is required to react against GP
evaluation (e.g., a detected predicate could be a sys-
tem failure).
A more elegant approach is, still from the execu-
tion checkpoints, to apply an adaptation of the algo-
rithm by Mazurkiewicz (Mazurkiewicz, 1997) which
gives a distributed way to compute graph coverings.
More precisely, each process can compute a graph
from which the network graph is a covering. From
this graph, predicates can be locally analyzed and ver-
ified; processes can then automatically react against
any system state.
4 CONCLUSIONS
In this paper, we presented a new design of the Vi-
SiDiA platform for the simulation and visualization
of distributed algorithms. We added debugging fea-
tures with a fully-distributed approach in the context
of anonymous and asynchronous networks. These are
made effortless accessible to users: the ViSiDiA API
contains new primitives, and the GUI offers visualiza-
tion of debugging information along with algorithm
execution. We also introduced a new method to build
our debugger.
Our proposal helps in monitoring a distributed
system, determining its global state from local in-
formation and detecting failures. We set a check-
point and rollback recovery system, and implemented
a semi automatic debugger. User oversight can be re-
leased computing local graph coverings.
We plan to focus on this technique, and to visual-
ize the graphs within each process in a multi-scale ap-
proach. Finally, our theoretical basis can be extended
to rewriting rules and mobile agents.
REFERENCES
Bauderon, M., Gruner, S., M´etivier, Y., Mosbah, M., and
Sellami, A. (2001). Visualization of distributed al-
gorithms based on labeled rewriting systems. In GT-
VMT’01, volume 50 of ENTCS, pages 229–239.
Bauderon, M. and Mosbah, M. (2003). A unified frame-
work for designing, implementing and visualizing dis-
tributed algorithms. ENTCS, 72(3):13 – 24.
Ben-Ari, M. (2001). Interactive execution of distributed al-
gorithms. J. Educ. Resour. Comput., 1.
Carr, S., Fang, C., Jozwowski, T., Mayo, J., and Shene, C.-
K. (2003). Concurrent mentor: A visualization system
for distributed programming education. In PDPTA’03.
Chalopin, J., M´etivier, Y., and Morsellino, T. (2011). On
snapshots and stable properties detection in anony-
mous fully distributed systems. submitted.
Chandy, K. M. and Lamport, L. (1985). Distributed snap-
shots: Determining global states of distributed sys-
tems. ACM Trans. Comput. Syst., 3(1):63–75.
Chang, X. (1999). Network simulations with OPNET, pages
307–314. ACM.
Derbel, B. and Mosbah, M. (2003). Distributing the exe-
cution of a distributed algorithm over a network. In
INFOVIS’03, pages 485 – 490.
Guerraoui, R. and Ruppert, E. (2005). What can be imple-
mented anonymously? In DISC, pages 244–259.
Koldehofe, B., Papatriantafilou, M., and Tsigas, P. (2003).
Integrating a simulation-visualisation environment in
a basic distributed systems course: a case study using
lydian. In ITiCSE’03, pages 35–39. ACM.
Matocha, J. and Camp, T. (1998). A taxonomy of dis-
tributed termination detection algorithms. Journal of
Systems and Software, 43(3):207–221.
Mazurkiewicz, A. (1997). Distributed enumeration. Inf.
Processing Letters, 61:233–239.
Moses, Y., Polunsky, Z., Tal, A., and Ulitsky, L. (1998).
Algorithm visualization for distributed environments.
In INFOVIS’98, pages 71–78.
Pongor, G. (1993). Omnet: Objective modular network
testbed. In MASCOTS ’93, pages 323–326.
Raynal, M. (1988). Networks and distributed computation.
MIT Press.
Stasko, J. T. and Kraemer, E. (1993). A methodology for
building application-specific visualizations of parallel
programs. J. Parallel Distrib. Comput., 18:258–264.
Szymanski, B., Shy, Y., and Prywes, N. (1985). Synchro-
nized distributed termination. IEEE Transactions on
software engineering, SE-11(10):1136–1140.
Tel, G. (2000). Introduction to distributedalgorithms. Cam-
bridge University Press.
Yamashita, M. and Kameda, T. (1996). Computing on
anonymous networks: Part i - characterizing the solv-
able cases. IEEE TPDS, 7(1):69–89.
FULLY-DISTRIBUTED DEBUGGING AND VISUALIZATION OF DISTRIBUTED SYSTEMS IN ANONYMOUS
NETWORKS
767
