
A 3D PHYSICS-BASED MODEL TO SIMULATE NORMAL
AND PATHOLOGICAL GAIT PATTERNS
Christian Cifuentes, Fabio Mart
´
ınez and Eduardo Romero
BioIngenium Research Group, Universidad Nacional de Colombia, Bogot
´
a, Colombia
Keywords:
Physics-based Modeling, Human Gait Animation, Motion Analysis, Rehabilitation Engineering.
Abstract:
This article presents a novel 3D physics-based human gait model that allows to quantify and simulate the
dynamic patterns of normal and pathological movements in the sagittal and coronal views, using an enhanced
inverted pendulum approach. The method outperforms the classic planar representations that do not consider
important gait phases like the double stance phase and the heelstrike, crucial in proper gait descriptions on
clinical routine. The model was assessed by simulating gait cycles and comparing the obtained trajectories
with actual normal and pathological gait data. Results showed that the normal and pathological kinematic
patterns generated by our model are highly similar to the actual data, obtaining an accuracy of about 87%.
1 INTRODUCTION
The gait is one of the most broadly studied motion
in very different domains such as medicine, anima-
tion or robotic (Xiang et al., 2010). This move-
ment is the result of complex interactions between
several sub-systems, which work together to gener-
ate the body dynamics that underlies the bipedal dis-
placement (Gage, 2004). This human gait patterns
are frequently disturbed in many types of patholo-
gies. In the clinical routine, a physician or rehabili-
tation expert searches pathological gait patterns (ac-
cording to her/his expertise), supporting the decision
on some statistical tests of the acquired data and in-
troducing thereby an inevitable expert-dependent bias
(Delp et al., 2007).
In addition, traditional methodologies to capture
gait patterns are very invasive and alter the natural
gait gestures which also are contaminated by cap-
ture noise. Therefore, development of gait models
achieving an accurate quantitative movement descrip-
tion has become a priority to support the physician
decisions (Fregly, 2008; Kuo and Donelan, 2010).
This work introduces a novel 3D human gait
model that generates the dynamic gait patterns in the
sagittal and coronal views observed in a clinical gait
analysis using a physics-based approach . It pro-
vides high flexibility, generating a large number of
walking patterns using only a complete CoG trajec-
tory representation and the heel trajectory data ob-
taining normal and pathological gait patterns, for in-
stance the dynamics of a typical cerebral palsy gait
(Crouch gait), changing a few set of parameters. This
simple mechanic gait representation simulates the en-
ergy accumulation of different anatomical elements,
responsible for most non linear gait patterns: it uses
a double-inverted pendulum system to simulate the
single stance CoG trajectory, while the double stance
CoG trajectory is simulated by a double spring-mass
system, in both sagittal and coronal views. The ob-
tained trajectory feeds a human like-structure, which
is animated using a learned heel trajectory and a clas-
sical inverse kinematic to calculate the dynamic pat-
terns. The rest of the paper is organized as follows:
Section Related Works review similar approaches re-
lated with the model of human gait, section Materials
and Methods introduces our model, section Results
demostrates the effectiveness of the model. The last
section presents the conclusion and future works.
2 RELATED WORKS
Several models have been previously proposed for
simulating the human gait, among which the physics-
based models obtain realistics and natural representa-
tions of the human Center of Gravity (CoG).(Xiang
et al., 2010). Likewise, they properly describe the
gait from an energy standpoint, simulating the change
from the kinematic to potential energy during the gait
cycle and taking into account the movement depende-
197
Cifuentes C., Martínez F. and Romero E..
A 3D PHYSICS-BASED MODEL TO SIMULATE NORMAL AND PATHOLOGICAL GAIT PATTERNS.
DOI: 10.5220/0003862701970201
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2012), pages 197-201
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

nce on some external interactions (Xiang et al., 2010).
One of the well known models was proposed by Gar-
cia et al. (Garcia et al., 1998) based on the passive
dynamic theory of McGeer (Garcia et al., 1998): a
double articulated pendulum system for which feet
are relatively small with respect to the trunk and the
heelstrike follows a very restrictive rule. This gait de-
scription is still limited because about a 30 % of the
gait cycle that corresponds to a double stance phase,
is completely eliminated and the CoG displacement
in the lateral axis (Y ) is not considered at all. Other
approaches included the inverted pendulum represen-
tation to describe the lateral and frontal CoG motion,
but not its vertical displacement, which is assumed
constant (Komura et al., 2004).
Other recent approaches are based on optimization
techniques and control-based models. The optimiza-
tion methods include a large number of degrees-of-
freedom for producing optimal motions while joint
force profiles remain subjected to a large number of
constraints(Delp et al., 2007; Fregly, 2008; Xiang
et al., 2010). These methods require relatively few
data to simulate simple human structures and pre-
dict new motions, very useful in computer graph-
ics, robotics and animation applications.The control-
based models have been commonly used on robotics
and biomechanics for designing the real-time control
in biped walking prototipes (Trifonov and Hashimoto,
2008). The main advantage of these methods is that
they approximate the actual human control systems,
allowing to simulate both normal and pathological
gaits. The neuromotor system simulation allows the
analysis of some neurological pathologies (Komura
et al., 2004), while this is computationally more ef-
ficient than the optimization-based models. Never-
theless these methods are computationally expensive
and require specific knowlegde of the problem (Xiang
et al., 2010) whereby these strategies are highly sub-
jective(Xiang et al., 2010), and also require a large
group of experimental data to generate natural mo-
tions. This last drawback has highly limited its appli-
cation in clinical gait analysis because of the specific
requirements to obtain a stable and natural motion.
3 MATERIALS AND METHODS
The gait model herein proposed fully describes a
3D CoG trajectory of normal and pathological gaits.
The whole model is built upon simple mechanical
relationships, approximating the 3D CoG displace-
ment with a double-inverted pendulum for the sim-
ple stance phase, and a double spring-mass system
for the double stance. Using this physics-based repre-
sentation, we can animate an human leg structure and
simulate normal and pathological kinematic patterns.
The kinematic patterns for each case was calculated
with a classic method of inverse-kinematic, using the
CoG trajectory obtained and a learned heel trajectory
taken from some gait laboratory’s data as illustrated
in figure 1.
3.1 Sagital CoG Description
As a first step, the CoG sagittal trajectory was com-
puted using a physics-based gait representation. The
single stance phase (one foot supporting the body)
was represented as a double-inverted pendulum. This
representation is based on the passive dynamic (Gar-
cia et al., 1998). This model is formulated as a pair of
coupled nonlinear equations: β(1 −cos φ)(3
¨
θ −
¨
φ) −
βsinφ(
˙
φ
2
−2θ
˙
φ)+(
gsinθ
l
)(β(sin(θ −φ)−1)) = 0 and
¨
θ(β(1−cosφ))−β
¨
φ+β
˙
θ
2
sinφ +(
βg
l
)sin(θ −φ) = 0,
where β = m/M , m is the mass of each foot and
M is the body mass, θ is the angle of the support-
ing leg at a particular time t and φ is the angle be-
tween both legs. When the leg stance has been ac-
complished, the heelstrike is represented by the non
linear ruleφ(t) −2θ(t) = 0. This phase is character-
ized by the hip and knee moments generated within
this interval, important biomarkers in many abnormal
movements.
On the other hand, the double stance phase, which
starts just after the heel strike, was represented as a
double spring-mass system. This physical formula-
tion introduces attenuation as it is usually observed
in an actual CoG trajectory because of the knee rota-
tion, but it also involves an intrinsic representation of
the muscles acting during this phase. This represen-
tation is given by the following equations (Blickhan,
1989): m ¨x = Px −Q(d −x) and m ¨y = Py + Qy −mg,
where P = k(
l
0
√
x
2
+y
2
−1), Q = k(
l
0
√
(d−x)
2
+y
2
−1), m
is the body mass, x and y are the sagittal and frontal
displacement respectively, d in the step length, k is
the spring constant, l
0
is the spring lengh at rest and g
is the gravity constant (9.81). This physic-based rep-
resentation describes completely the CoG trajectory
and allows to have the flexibility needed to generate
different kind of gaits, i.e., pathological gaits.
3.2 Coronal CoG Trajectory
A main contribution of this work is a 3D gait repre-
sentation that allows to accurately mimic pathological
motions like the pelvic balancing (Garcia et al., 1998).
The CoG trajectory in the coronal view was simu-
lated using the inverted-pendulum approach. First, we
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
198
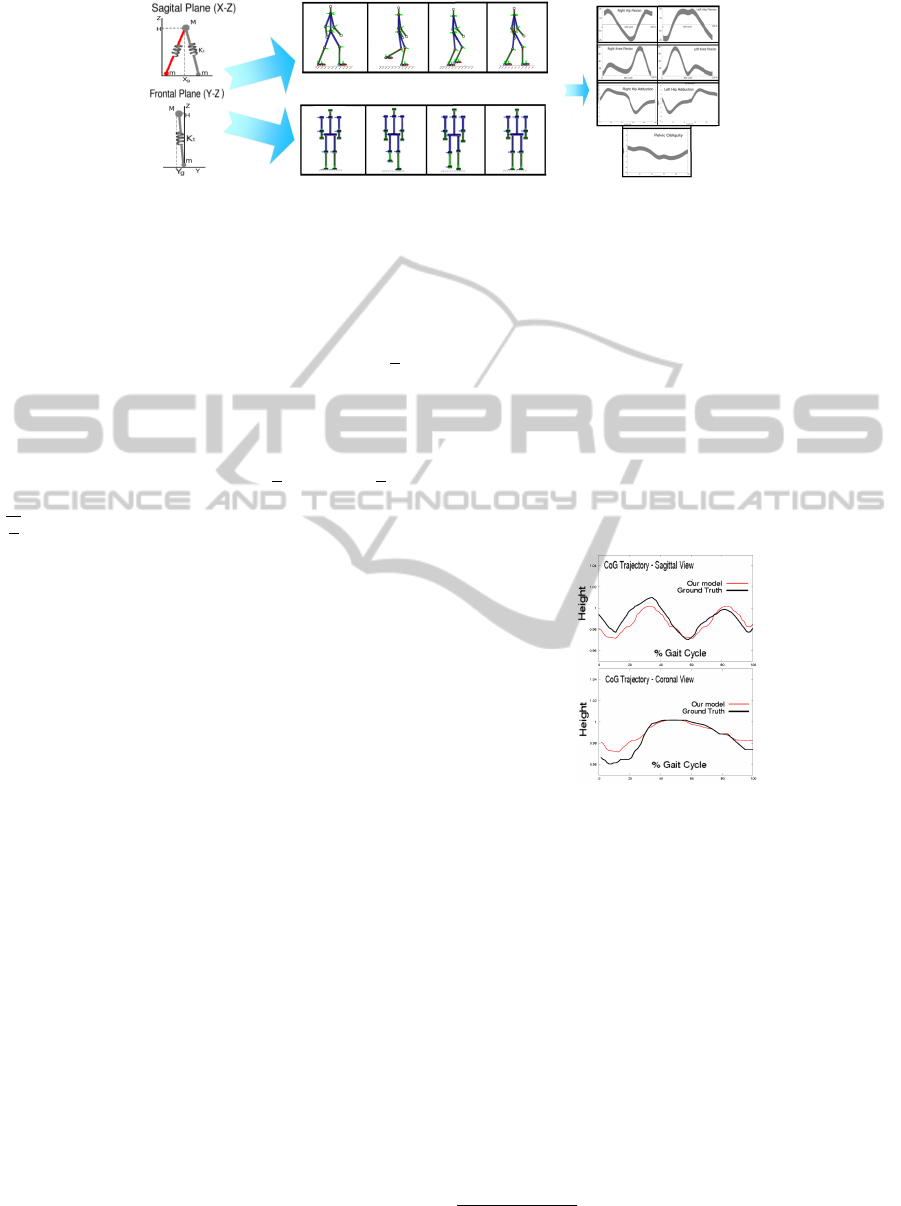
Figure 1: Overview of our proposal. Firstly, it is computed independently the CoG trajectory in both sagittal and coronal
views. Then we built up an articulated structure and simulate the human gait using the CoG and a learned heel trajectory
using a classical inverse kinematic approach.
calculated independently the CoG motion in both the
x −z and the y −z planes (Komura et al., 2004). The
CoG trajectory was modeled by a simple inverted pen-
dulum represented by the following equation: ¨y =
g
z
i
y
Where z
i
is the CoG heigh at time i (same time
for the sagittal view) and g is the gravity constant
(g = 9.81) (Komura et al., 2004). Given the initial
conditions, the CoG trajectory can be described by
the following equation: y = y
0
cosh
t
T
+ ˙y
0
T sinh
t
T
Where y
0
and ˙y
0
are the initial conditions and T =
q
z
i
g
.
Finally, a complete 3D CoG trajectory was ob-
tained calculating independently both the sagittal and
frontal CoG trajectories.
3.3 3D Human Model Representation
This model not only describes the gait in terms
of energy, but it also introduces a flexion-
extension/adduction-abduction limb description
as well as a pelvic obliquity that modify the model
dynamics. The kinematic simulation is herein carried
out using a classical inverse-kinematic method whose
resultant trajectory animates a human-like leg struc-
ture, composed of seven articulated rigid segments as
illustrated in Figure 1.
3.4 Pathological Gait Simulation
The main advantage of our proposed 3D human rep-
resentation is that it allows to simulate many kind of
movements patterns in both sagittal and coronal views
by only tuning the parameters k (the elasticity con-
stant) and d (the step length). With little change in
these parameters it is possible to simulate the CoG
changes observed in some pathological gaits and to
obtain the knee rotation and the CoG attenuation that
characterizes some pathological movements. Setting
the k ∼ 400 and d ∼ 0.7, a normal gait is simulated,
but if the k value is increased and/or the d constant is
decreased, a pathological gait, for instance the crouch
gait
1
that characterizes the motion of several cerebral
palsy patients (Gage, 2004) is simulated.
4 RESULTS
The evaluation was initially carried out by comparing
the CoG trajectory generated by our model with the
actual one observed from normal gait trajectories as
shown in the figure 2.
Figure 2: Calculated CoG trajectory in sagittal (top) and
coronal view (bottom).
For both sagittal and coronal views, we calculated
the correlation coefficient to establish the degree of
similarity between both actual and simulated CoG tra-
jectories. The results shows that the correlation coef-
ficient in the sagittal view is 0.85 ±0.056 and for the
coronal view is 0.97 ±0.013.
4.1 Simulating Normal Gait Patterns
As a second evaluation, we compared the estimated
obtained gait kinematic patterns with ground truth tra-
jectories that were obtained from normal patients, as
reported in the literature (Gage, 2004), composed of
sagittal and coronal patterns of a gait cycle.
1
This kind of gait is characterized by an exaggerated
knee flexion.
A 3D PHYSICS-BASED MODEL TO SIMULATE NORMAL AND PATHOLOGICAL GAIT PATTERNS
199
As in the previous subsection we calculated the
correlation coefficient to establish the degree of simi-
larity between both trajectories, the patterns obtained
by our method and the average of each actual normal
pattern(table 1).
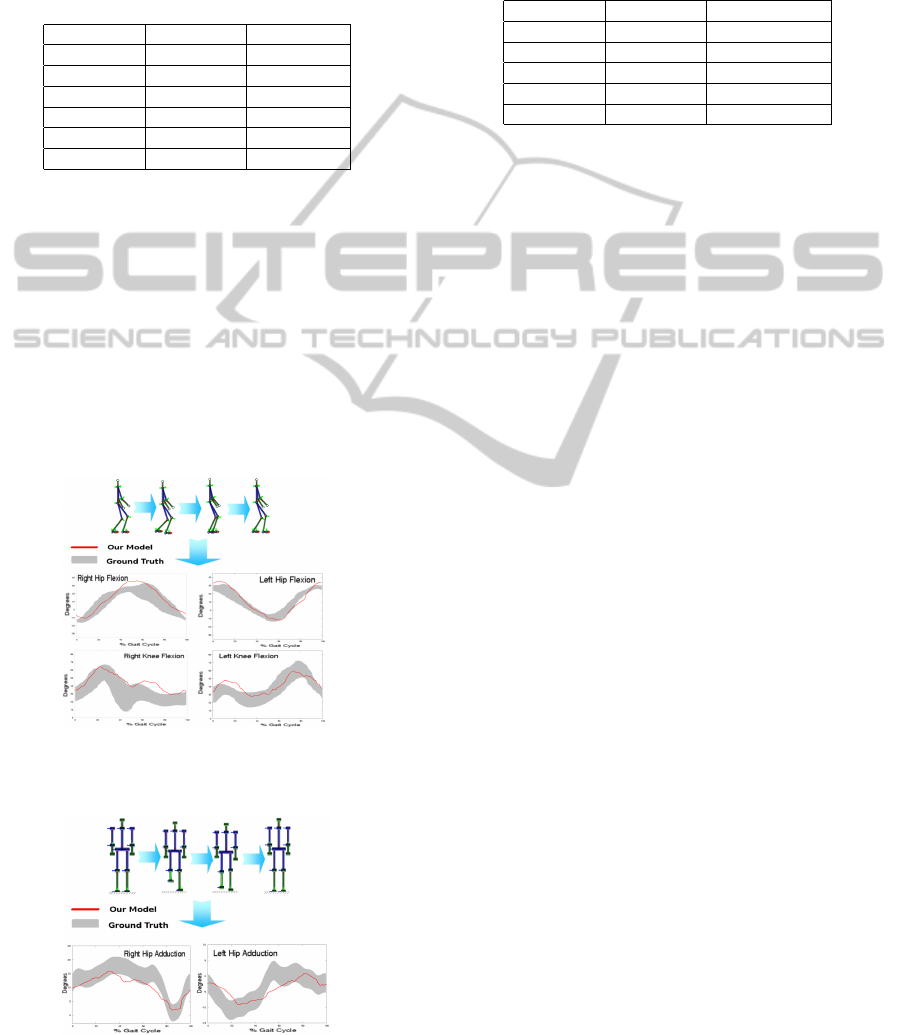
Table 1: This table shows the correlation factor calculated
between both actual and simulated kinematic patterns.
Sagittal View R. Hip Flex. 0.974 ± 0.016
R. Knee Flex. 0.71 ± 0.021
L. Hip Flex. 0.968 ± 0.016
L. Knee Flex. 0.71 ± 0.021
Coronal View R. Hip Add. 0.918 ± 0.013
L. Hip Add. 0.891 ± 0.013
Pelvic Obliq. 0.876 ± 0.02
4.2 Evaluation for an Actual Pathology
As previously mentioned, one of the main advantages
of our model is the possibility of representing patho-
logical gaits by only tuning some parameters of the
spring-mass model: The elasticity constant k and the
step length d. A crouch gait pattern was simulated by
simply increasing the k constant and decreasing the
d constant for both frontal and coronal views, as is
comment in the section 3 and as shown in figures 3
and 4.
Figure 3: Simulation (top) and generated pathological pat-
terns (bottom) in the sagittal view.
Figure 4: Simulation (top) and generated pathological pat-
terns (bottom) in the coronal view.
The correlation coefficient was calculated to com-
pare the similarity between the patterns obtained and
the average of the actual data. The results are shown
in the table 2.
Table 2: This table shows the correlation factor calculated
between both actual and simulated kinematic patterns.
Sagittal View R. Hip Flex. 0.9514 ± 0.012
R. Knee Flex. 0.8638 ± 0.1101
L. Hip Flex. 0.9529 ± 0.00098
L. Knee Flex. 0.8810 ± 0.0425
Coronal View R. Hip Add. 0.9188 ± 0.023
L. Hip Add. 0.891 ± 0.023
5 CONCLUSIONS
This work has introduced a mechanical gait model
which is able to mimic pathological patterns, specifi-
cally a gait crouch which is characteristic of the cere-
bral palsy. This kind of models is a potential useful
tool for the physician understands the nature of a par-
ticular pattern during the gait. This kind of adapted
designs in addition can be a remarkable aide to simu-
late the evolution of a specific treatment so that treat-
ment planning is possible.
ACKNOWLEDGEMENTS
This work was partially funded by the project number
14510 of 2011 accepted by the DIB (Direccin de In-
vestigacin sede Bogot) of the National University of
Colombia.
REFERENCES
Blickhan, R. (1989). The spring-mass model for running
and hopping. Journal of Biomechanics, 22:1217 –
1227.
Delp, S. L., Anderson, F. C., Arnold, A. S., Loan, P., Habib,
A., John, C. T., Guendelman, E., and Thelen, D. G.
(2007). Opensim open source software to create and
analyze dynamic simulations of movement. IEEE
Trans Biomed Eng, 54:1940 – 1951.
Fregly, B. J. (2008). Design of optimal treatments for
neuromusculoskeletal disorders using patient-specific
multibody dynamic models. Int J Comput Vision and
Biomech, r:1–31.
Gage, J. R. (2004). The Treatment of Gait Problems in Cere-
bral Palsy. Mac Keith Press.
Garcia, M., Chatterjee, A., Ruina, A., and Coleman, M.
(1998). The simplest walking model: Stability, com-
plexity, and scaling. J Biomech Eng, d:1–15.
GRAPP 2012 - International Conference on Computer Graphics Theory and Applications
200

Komura, T., Nagano, A., Kudoh, S., and Shinagawa, Y.
(2004). Simulating pathological gait using the en-
hanced inverted pendulum model. J Biomech Eng,
r:1–18.
Kuo, A. D. and Donelan, J. M. (2010). Dynamic princi-
ples of gait and their clinical implications. Physical
Therapy, 90(2):157–176.
Trifonov, K. and Hashimoto, S. (2008). Active knee-
release mechanism for passive-dynamic walking ma-
chines and walking cycle re search. In IEEE/RSJ Int
Conf on Intelligent Robots and Systems.
Xiang, Y., Arora, J. S., and Abdel-Malek, K. (2010).
Physics-based modeling and simulation of human
walking: a review of optimization-based and other ap-
proaches. Struct Multidisc Optim, 42:1–23.
A 3D PHYSICS-BASED MODEL TO SIMULATE NORMAL AND PATHOLOGICAL GAIT PATTERNS
201
