
HIGH RESOLUTION POINT CLOUD GENERATION
FROM KINECT AND HD CAMERAS USING GRAPH CUT
Suvam Patra, Brojeshwar Bhowmick, Subhashis Banerjee and Prem Kalra
Department of Computer Science and Engineering, Indian Institute of Technology Delhi, New Delhi, India
Keywords:
Kinect, Resolution Enhancement, Graph Cut, Normalized Cross Correlation, Photo Consistency, VGA, HD.
Abstract:
This paper describes a methodology for obtaining a high resolution dense point cloud using Kinect (Smisek
et al., 2011) and HD cameras. Kinect produces a VGA resolution photograph and a noisy point cloud. But
high resolution images of the same scene can easily be obtained using additional HD cameras. We combine
the information to generate a high resolution dense point cloud. First, we do a joint calibration of Kinect and
the HD cameras using traditional epipolar geometry (Hartley and Zisserman, 2004). Then we use the sparse
point cloud obtained from Kinect and the high resolution information from the HD cameras to produce a dense
point cloud in a registered frame using graph cut optimization. Experimental results show that this approach
can significantly enhance the resolution of the Kinect point cloud.
1 INTRODUCTION
Nowadays, many applications in computer vision are
centred around generation of a complete 3D model of
an object or a scene from depth scans or images. This
traditionally required capturing images of the scene
from multiple views to generate a model of the scene.
However, today with the advent of affordable range
scanners, reconstruction of scenes from multi-modal
data which include image as well as depth scans of
objects and scenes help in more accurate modelling
of 3D scenes.
There has been considerable work with time-of-
flight (ToF) cameras which capture depth scans of the
scene by measuring the travel time of an emitted IR
wave from the device reflected back from the object
(Schuon et al., 2008). Recently, a much cheaper range
sensor has been introduced by Microsoft called the
Kinect (Smisek et al., 2011) which has an inbuilt cam-
era, an IR emitter and a receiver. The emitter projects
a predetermined pattern whose reflection off the ob-
ject provides the depth cues for 3D reconstruction.
Though Kinect produces range data only in VGA res-
olution, this data can be very useful as an initial es-
timate for subsequent resolution enhancement. There
have been several approaches to enhance the resolu-
tion of a point cloud obtained from range scanners
or ToF cameras, using interpolation or graph based
techniques (Schuon et al., 2009; Schuon et al., 2008).
Diebel
et.al. (Diebel and Thrun, 2006) used a MRF based
approach whose basic assumption is that depth dis-
continuities in scene often co-occur with intensity or
brightness changes in the scene, or in other words
regions of similar intensity in a neighbourhood have
similar depth. Yang et.al. (Qingxiong Yang and Nistr,
2007) make the same assumption and use a bilateral
filter to enhance the resolution in depth. However, the
assumption is not universally true and may result in
over smoothing of the solution.
Sebastian et. al. (Schuon et al., 2009; Schuon
et al., 2008), use a super-resolution algorithm on low
resolution LIDAR ToF cameras and they rely on the
depth data for detecting depth discontinuities instead
of relying on regions of image smoothness.
In this paper we propose an algorithm for depth
super-resolution using additional information from
multiple images obtained through HD cameras. We
register the VGA resolution point cloud obtained
from Kinect with what can be obtained from the HD
cameras using multiple views geometry and carry out
a dense 3D reconstruction in the registered frame us-
ing two basic criteria: i) photo-consistency (Kutu-
lakos and Seitz, 1999) and ii) rough agreement with
Kinect. The reconstructed point cloud is at least ten
times denser in comparison to the initial point cloud.
In this process we also fill up the holes of the initial
Kinect point cloud.
311
Patra S., Bhowmick B., Banerjee S. and Kalra P..
HIGH RESOLUTION POINT CLOUD GENERATION FROM KINECT AND HD CAMERAS USING GRAPH CUT.
DOI: 10.5220/0003863003110316
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 311-316
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 PROPOSED METHODOLOGY
2.1 Camera Calibration
We determine the camera internal calibration matrices
(Hartley and Zisserman, 2004) for the Kinect VGA
camera and all the HD cameras offline using a state
of the art camera calibration technique (Zhang, 2000).
Henceforth we assume that all the internal camera cal-
ibration matrices are known and define the 3 ×4 cam-
era projection matrix for the Kinect VGA camera as
P = K[I|0] (1)
where K is the camera internal calibration matrix of
the Kinect VGA camera. In other words, Kinect is
our world origin.
We use ASIFT (Morel and Yu, 2009) to obtain
image point correspondences and for every HD cam-
era we compute the extrinsic camera parameters us-
ing standard epipolar geometry (Hartley and Zisser-
man, 2004). For each HD camera we first carry out
a robust estimation of the fundamental matrix (Hart-
ley and Zisserman, 2004). Given a set of image point
correspondences x and x
0
, the fundamental matrix F
is given by:
x
0T
Fx = 0 (2)
and can be computed using eight point correspon-
dence.
Once, the Fundamental Matrix is known, we can
estimate the external calibration from essential matrix
E, derived from Fundamental matrix using the equa-
tion as in (Hartley and Zisserman, 2004)
E = K
0T
FK = [t]
×
R = R[R
T
t]
×
where, K
0
is the
internal calibration matrix of the HD camera. As this
essential matrix has four possible decompositions, we
can select one of them using the cheirality check
(Hartley and Zisserman, 2004) on Kinect point cloud.
The projection matrix of the HD camera in the
Kinect reference frame is then given as
P
0
= K
0
[R|t] (3)
2.2 Generation of High Resolution
Point Cloud
Normalized cross correlation(NCC) method, which
tries to find point correspondences in an image pair
by computing statistical correlation between the win-
dow centred at the candidate point, is an inadequate
tool for finding dense point correspondences. Pro-
jecting the sparse Kinect point cloud on to an HD im-
age leaves most pixels without depth labels, and one
can attempt to establish correspondence for these pix-
els using normalized cross correlation along rectified
epipolar lines. Once the correspondence is found we
can obtain the 3D point for this correspondent pair
using stereo triangulation technique. In figure 1 we
show a result obtained using NCC. The reconstruc-
tion has many holes due to ambiguous cross correla-
tion results and incorrect depth labels.
(a) Initial Kinect point
cloud.
(b) High resolution point
cloud generated by NCC.
Figure 1: Resolution enhancement using NCC.
The voxel labelling problem can be represented as
one of minimizing an energy function of the form
E(L) =
∑
p∈P
D
p
(L
p
) +
∑
(p,q)∈N
V
p,q
(L
p
, Lq) (4)
where P is the set of voxels to be labelled, L =
{L
p
|p ∈ P } is a 0-1 labeling of the voxel p, D
p
(.) is
data term measuring the consistency of the label as-
signment with the available data, N defines a neigh-
bourhood system for the voxel space and each V
p,q
(.)
is a smoothness term that measures the consistency of
labelling at neighbouring voxels.
When the above energy minimization problem
is represented in graphical form (Boykov and Kol-
mogorov, 2004), we get a two terminal graph with
one source and one sink nodes representing the two
possible labels for each voxel (see figure 2). Each
voxel is represented as a node in the graph and each
node is connected to both source and sink nodes with
edge weights defined according to the data term of
the energy function. In addition, the voxel nodes are
also connected to each other with edges, with edge
strengths defined according to the neighbourhood in-
teraction term. A minimum cut through this graph
gives us a minimum energy of the configuration.
Figure 2: A two terminal graph from (Boykov and Kol-
mogorov, 2004).
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
312

2.2.1 Assigning Cost to the Data Term
Photo consistency (Kutulakos and Seitz, 1999) is one
of the most frequently used measures for inter image
consistency. However, in real situations, several vox-
els in a close neighbourhood in depth satisfy the photo
consistency constraint resulting in a “thick” surface
as demonstrated in top view in figure 3. In view of
this, we use closeness to initial Kinect data as an ad-
ditional measure to resolve this problem of thickness
in the output high resolution point cloud.
(a) Acual view
of the scene
from front.
(b) Top
view without
distance
measure.
(c) Top view
with distance
measure.
Figure 3: Comparison between resolution enhancement
without and with distance measure.
We define the data term based on the following
two criteria: i) Adaptive photo consistency measure
for each voxel. ii)Distance of each voxel from its
nearest approximate surface.
We use the photo consistency measure suggested
by Slabaugh et. al.(Slabaugh and Schafer, 2003). We
project each voxel i on to the N HD images and cal-
culate the following two measures:
1. S(i), the standard deviation of the intensity values
in the projection neighbourhoods calculated over
all N images.
2. ¯s(i), the average of the standard deviation in the
projection neighbourhoods for each image projec-
tion.
The voxel i is photo consistent over the N images if
the following condition is satisfied
S(i) < τ
1
+ τ
2
∗ ¯s(i) (5)
where τ
1
and τ
2
are global and local thresholds to be
suitably defined depending on the scene. The overall
threshold specified by the the right hand side of the
above inequality changes adaptively for each voxel.
For each voxel we assign a weight D
photo
(.) for the
terminal edges in the graph based on this threshold.
D
photo
(i) = photocost ∗ exp(−
S(i)
τ
1
+ τ
2
∗ ¯s(i)
) (6)
with the source and
D
photo
(i) = photocost ∗ (1 − exp(−
S(i)
τ
1
+ τ
2
∗ ¯s(i)
))
(7)
with the sink
where, S(i) and τ
1
+ τ
2
∗ ¯s(i) is the standard devia-
tion and the adaptive threshold respectively for the i
th
voxel and photocost is a scale factor. Here the ex-
pression inside the exponential gives the normalized
standard deviation of i
th
voxel.
As a pre-processing step before applying graph
cut, we create an approximate surface (Alexa and
Behr, 2003) for each non-Kinect voxel using the
Kinect voxels in its neighbourhood N
K
of size K ×
K × K. We pre-process the Kinect point cloud to
generate an approximate surface for each non-Kinect
voxel in our voxel space in the following way:
We consider S
p
as the surface that can be con-
structed with the voxels P = {p
i
} captured by the
Kinect. Then, as suggested in (Alexa and Behr,
2003), we try to replace S
p
with an approximate sur-
face S
r
with reduced set of voxels R = {r
i
}. This
is done in two steps: A local reference plane H =
{x|
h
n, x
i
− D = 0, x ∈ R
3
}, n ∈ R
3
, ||n|| = 1 is con-
structed using the moving least squares fit on the the
point p
i
under consideration. The weights for each p
i
is a function of the distance from the projected cur-
rent voxel on to the plane. So, H can be determined
by locally minimizing
N
∑
i=1
(
h
n, p
i
i
− D)
2
θ(||p
i
− q||) (8)
where θ is a smooth monotonically decreasing func-
tion, q is the projected point on the plane correspond-
ing to the voxel r, n is the normal and D is the per-
pendicular distance from the origin of the plane. As-
suming q = r + tn with t as a scale parameter along
the normal, equation(8) can be rewritten as
N
∑
i=1
(
h
n, p
i
− r −tn
i
)
2
θ(||p
i
− r −tn||) (9)
Let q
i
be the projection of p
i
on H and f
i
be the
height of p
i
over H. We can find the surface estimate
Z = g(X,Y ) by minimizing the least squares equation
given by:
N
∑
i=1
(g(x
i
, y
i
) − f
i
)
2
θ(||p
i
− q||) (10)
where x
i
and y
i
are the x and y values correspond-
ing to the i
th
voxel and θ is a smooth monotonically
decreasing function which is defined as:
θ(d) = e
−
d
2
h
2
(11)
where, h is the fixed parameter which depicts the
spacing between neighbouring voxels. It reflects the
smoothness in the surface. For our experiment we
have taken a fourth order polynomial fitting.
HIGH RESOLUTION POINT CLOUD GENERATION FROM KINECT AND HD CAMERAS USING GRAPH CUT
313
This surface is locally smooth and usually lacks
geometric details, but provides a good measure for the
approximate depth of the surface.
Hence, the second cost that we include in the data
term is based on the distance of the current voxel from
the pre-computed surface that fits that voxel. So, we
project each of the non-Kinect voxel on to the pre-
computed surface (Alexa and Behr, 2003). Ideally
if the voxel is on the surface then the difference be-
tween its actual coordinates and projected coordinates
should be small, which encourage us to use this mea-
sure in the data term. Accordingly, we assign a cost
to D
p
on the basis of the euclidean distance between
its actual coordinates and projected coordinates on the
approximate surface.
D
dist
(i) =
P(r
i
) − r
i
dist threshold
(12)
with the source and
D
0
dist
(i) = 1 − D
dist
(i) (13)
with the sink. Here, the threshold dist threshold is
experimentally determined on the basis of the scene
under consideration. The total cost is expressed as:
D
p
(i) = D
dist
(i) ∗ D
photo
(i) (14)
Table 1: Assignment of D
p
.
D
p
(i) Type of Voxel
∞ with source and Kinect voxel
0 with sink
Based on equation(6,7,12,13,14) Non-Kinect voxel
The cost D
p
(.) is assigned to a Kinect voxel so that
it is turned “ALWAYS ON”. After that, for each non-
Kinect voxel first a distance check is done followed by
a photo consistency check over all the N HD images.
Then accordingly a cumulative cost is assigned based
on the equations above.
2.2.2 Assigning Cost to the Smoothness Term
We have assigned a constant smoothness cost to the
edges between each of the voxels and its neighbour-
hood N . Here, we have taken N to be the 6-
neighbourhood of each voxel.
Smoothness cost is assigned according to the Potts
model(Kolmogorov and Zabih, 2004; Boykov et al.,
2001). We can represent V
p,q
as
V
p,q
( f
p
, f
q
) = U
p,q
.δ( f
p
6= f
q
) (15)
Here, we have taken V
p,q
from Potts model as in Table
2. After assigning the data and smoothness costs to
the graph edges, we run the min-cut on this graph.
Table 2: Assignment of V
p,q
based on Potts model.
V
p,q
( f p, f q) Condition
0 f p = f q(Both are Kinect voxels)
100 Otherwise
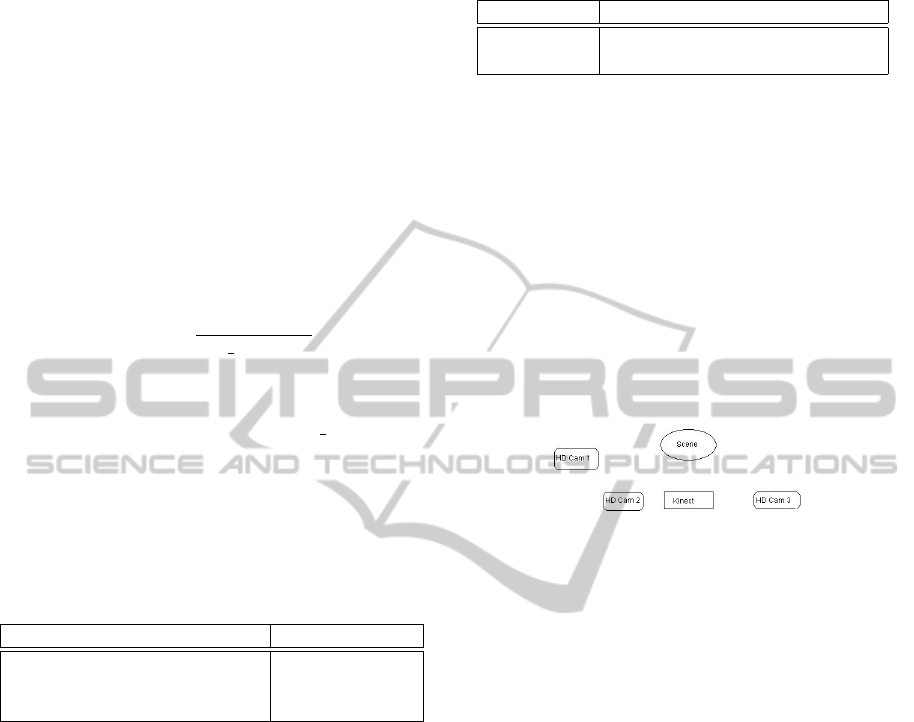
3 RESULTS
We provide experimental results on both indoor and
outdoor scenes. For capturing the HD images we
have used the SONY HVR-Z5P camera which has an
image resolution of 1440 × 1080. This camera was
placed at multiple positions to capture images of the
same scene from different viewpoints. The experi-
mental set-up for capturing a typical scene by one
Kinect and three HD cameras has been depicted in
figure 4.
Figure 4: Our experimental set-up for capturing a typical
scene.
We have used a Dell Alienware i7 machine with
6GB RAM support for producing the results. In our
case the number of voxels that we take for the scene
depends largely on the amount of physical memory
of the machine. The figure 5 shows the resolution en-
hancement of an indoor scene done using one Kinect
and two HD cameras. Figure 5b shows the high res-
olution point cloud generated with our method. In
this all the holes have been filled up in contrast to
the point cloud generated using NCC based method
as shown in figure 1b. There are almost no outlier
points. Here we have used 300×300×100 voxels and
the value of τ
1
= 60 and τ
2
= 0.5. Figure 6 shows the
result of resolution enhancement on an outdoor scene
in the archaeological site of Hampi using one Kinect
and two HD cameras. The point cloud is at least 10
times denser than the initial point cloud. The value of
τ
1
and τ
2
were chosen to be 80 and 0.5 respectively.
Figure 7 also shows the resolution enhancement on
another sculpture at Hampi using one Kinect and two
HD cameras. The values of τ
1
and τ
2
were similar to
figure 6.
Figure 8 shows the resolution enhancement of a
toy model where the surface is not smooth. This ex-
periment was performed using one Kinect and three
HD cameras. We have shown the dense point cloud
corresponding to both the low resolution scene as well
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
314

as the high resolution scene and finally overlapped
their coloured depth map to show that the geometry
is not distorted in any way. In order to do a quantita-
tive evaluation of our methods we have adopted two
approaches.
(a) Initial point
cloud.
(b) High resolu-
tion point cloud.
(c) Side view.
Figure 5: Indoor scene- A typical room. (a) Initial low
resolution point cloud from Kinect, (b) and (c) front and
side view of the high resolution point cloud generated by
our method with τ
1
= 80 and τ
2
= 0.5.
(a) Initial
point cloud.
(b) High resolu-
tion point cloud.
(c) Side
view.
Figure 6: Archaeological scene1- A sculpture depicting a
monkey on a pillar. (a) Initial low resolution point cloud
from Kinect, (b) and (c) front and side view of the high
resolution point cloud generated by our method with τ
1
=
60 and τ
2
= 0.5.
(a) Initial point
cloud.
(b) High resolu-
tion point cloud.
(c) Side view.
Figure 7: Archaeological scene2- A sculpture depicting a
goddess on a pillar. (a) Initial low resolution point cloud
from Kinect, (b) and (c)front and side view of the high res-
olution point cloud generated by our method with τ
1
= 60
and τ
2
= 0.5.
3.1 Verification through Projection on
Another Camera
In order to demonstrate the efficiency of our method
we have computed the projection matrix of a different
camera which is seeing the same scene as of figure 6,
little displaced from the original cameras used for res-
olution enhancement and whose external calibration
matrix [R|t] is known beforehand. We have used this
projection matrix to project the HD point cloud onto
(a) Initial point
cloud.
(b) High res-
olution point
cloud.
(c) Two depth
maps overlapped.
Figure 8: Indoor Scene- A model of a dog. (a) Initial low
resolution point cloud from Kinect, (b) front view of the
high resolution point cloud generated by our method with
τ
1
= 70 and τ
2
= 0.5, (c) blue HD depth map overlapped
with red low resolution depth map showing that the geome-
try is preserved.
(a) Original
image.
(b) Pro-
jected
image.
(c) Dif-
ference
image.
Figure 9: Verification through projection on another cam-
era for the scene in figure 6. The difference image in which
around 90% is black, shows that the geometry is preserved.
a 2D image and have taken the difference between the
projected image and the ground truth. The difference
image in figure 9c is around 90% black showing that
the HD point cloud generated by our method was ge-
ometrically accurate.
3.2 Verification through Interpolation
and Comparison
In order to show that the depth map of the HD point
cloud generated by our method conforms to the point
cloud generated by Kinect, we generated an interpo-
lated point cloud for the initial point cloud of figure
6 by fitting an MLS surface of order four through it.
In order to quantify that our result show better depth
variations than the interpolated point cloud, we took
a part of each of the point clouds generated by the
interpolation method and our method; and compared
them with that of the Kinect point cloud. The stan-
dard deviation of the depth variations in the selected
part of the point cloud generated by interpolation
was 0.010068 whereas the same by our method was
0.021989, which is much closer to the standard devi-
ation generated by original point cloud i.e. 0.024674.
HIGH RESOLUTION POINT CLOUD GENERATION FROM KINECT AND HD CAMERAS USING GRAPH CUT
315

(a) Original
Kinect point
cloud.
(b) Interpolated
point cloud.
(c) HD point
cloud generated
by our method.
Figure 10: Verification through interpolation and compar-
ison. The area selected by the red rectangle shows the part
selected for quantitative estimation of the depth variations.
4 CONCLUSIONS
We have presented a methodology which combines
HD resolution images with the low resolution Kinect
to produce high-resolution dense point cloud using
graph cut. Firstly, Kinect and HD cameras are regis-
tered to transfer Kinect point cloud to the HD camera
for obtaining high resolution point cloud space. Then,
we discretize the point cloud in voxel space and for-
mulate a graph cut formulation which take care of the
neighbor smoothness factor. This methodology pro-
duces good high resolution image with the help of low
resolution Kinect point cloud which could be useful in
building high resolution model using Kinect.
ACKNOWLEDGEMENTS
The authors gratefully acknowledge Dr. Subodh Ku-
mar, Neeraj Kulkarni, Kinshuk Sarabhai and Shruti
Agarwal for their constant help in providing several
tools for Kinect data acquisition, module and error
notification respectively.
Authors also acknowledge Department of Science
and Technology, India for sponsoring the project on
“Acquisition, representation, processing and display
of digital heritage sites” with number “RP02362”
under the India Digital Heritage programme which
helped us in acquiring the images at Hampi in Kar-
nataka, India.
REFERENCES
Alexa, M. and Behr, J. (2003). Computing and rendering
point set surfaces. In IEEE Transactions on Visualiza-
tion and Computer Graphics.
Boykov, Y. and Kolmogorov, V. (2004). An experimental
comparison of min-cut/max-flow algorithms for en-
ergy minimization in vision. In IEEE Transactions
on Pattern Analysis and Machine Intelligence, Vol. 26,
No. 9, pages 1124–1137.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast approx-
imate energy minimization via graph cuts. In IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, vol. 23, pages 1222–1239.
Diebel, J. and Thrun, S. (2006). An application of markov
random fields to range sensing. in advances in neural
information processing. In Advances in Neural Infor-
mation Processing Systems, page 291 298.
Hartley, R. and Zisserman, A. (2004). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
New York, 2nd edition.
Kolmogorov, V. and Zabih, R. (2004). What energy func-
tions can be minimized via graph cuts? In IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, pages 147–159.
Kutulakos, K. and Seitz, S. (1999). A theory of shape by
space carving. In 7th IEEE International Conference
on Computer Vision, volume I, page 307 314.
Morel, J.-M. and Yu, G. (2009). Asift: A new framework
for fully affine invariant image comparison. In SIAM
Journal on Imaging Sciences. Volume 2 Issue 2.
Qingxiong Yang, Ruigang Yang, J. D. and Nistr, D. (2007).
Spatial-depth super resolution for range images. In
IEEE Conference on Computer Vision and Pattern
Recognition.
Schuon, S., Theobalt, C., Davis, J., and Thrun, S. (2008).
High-quality scanning using time-of-flight depth su-
perresolution. In IEEE Computer Society Conference
on Computer Vision and Pattern Recognition Work-
shops.
Schuon, S., Theobalt, C., Davis, J., and Thrun, S. (2009).
Lidarboost depth superresolution for tof 3d shape
scanning. In IEEE Conference on Computer Vision
and Pattern Recognition.
Slabaugh, G. and Schafer, R. (2003). Methods for volumet-
ric reconstruction of visual scenes. In IJCV 2003.
Smisek, J., Jancosek, M., and Pajdla, T. (2011). 3d with
kinect. In IEEE Workshop on Consumer Depth Cam-
eras for Computer Vision.
Zhang, Z. (2000). A flexible new technique for camera cal-
ibration. In IEEE Transactions On Pattern Analysis
And Machine Intelligence, VOL. 22, NO. 11.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
316
