
TRACKING SOLUTIONS OF TIME VARYING LINEAR INVERSE
PROBLEMS
Martin Kleinsteuber and Simon Hawe
Department of Electrical Engineering and Information Technology, Technische Universit
¨
at M
¨
unchen
Arcistraße 21, Munich, Germany
Keywords:
Linear inverse problems, Signal reconstruction, Time varying signal reconstruction, Discretized newton flow.
Abstract:
The reconstruction of a signal from only a few measurements, deconvolving, or denoising are only a few
interesting signal processing applications that can be formulated as linear inverse problems. Commonly, one
overcomes the ill-posedness of such problems by finding solutions which best match some prior assumptions.
These are often sparsity assumptions as in the theory of Compressive Sensing. In this paper, we propose
a method to track solutions of linear inverse problems. We assume that the corresponding solutions vary
smoothly over time. A discretized Newton flow allows to incorporate the time varying information for tracking
and predicting the subsequent solution. This prediction requires to solve a linear system of equation, which
is in general computationally cheaper than solving a new inverse problem. It may also serve as an additional
prior that takes the smooth variation of the solutions into account, or, as an initial guess for the preceding
reconstruction. We exemplify our approach with the reconstruction of a compressively sampled synthetic
video sequence.
1 INTRODUCTION
Linear inverse problems arise in various signal pro-
cessing applications like in signal deconvolution, de-
noising, interpolation, or signal reconstruction from
few measurements as in Compressive Sensing. Basi-
cally, they aim at computing or reconstructing a signal
s ∈ R
n
from a set of measurements y ∈ R
m
. Formally,
this measurement process can be written as
y = As +e, (1)
where the vector e ∈ R
m
models sampling errors and
noise, and A ∈ R
m×n
is the measurement matrix. In
most interesting cases, this problem is ill-posed be-
cause either the exact measurement process and hence
A is unknown as in image deblurring, or the number
of observations is much smaller than the dimension of
the signal, which is the case in Compressive Sensing.
In this paper, we restrict to the latter case where the
measurement matrix A is known.
Prior assumptions on the signal help to overcome
the ill-posedness of this problem and to stabilize the
solution. They are incorporated in the signal recov-
ery process by the minimization of a suitable function
g: R
n
→ R, leading to the optimization problem
minimize
s
?
∈R
n
g(s
?
)
subject to kAs
?
− yk
2
2
≤ ε, (2)
where ε is an estimated upper bound on the noise
power kek
2
2
. We refer to (Elad et al., 2007) for the
investigation of two conceptual different approaches,
the so called synthesis and the analysis approach.
One of the most commonly used priors which
we will use in our experiments, is based on the fact
that many interesting signals have a sparse or com-
pressible representation with respect to some (possi-
bly overcomplete) basis. This means that the entire
information about the signal is contained in only a few
transform coefficients. A common sparsity measure is
the `
p
-(pseudo-) norm
kvk
p
p
:=
∑
i
|v(i)|
p
, 0 ≤ p ≤ 1, (3)
where here and throughout the paper, v(i) denotes the
i
th
entry of the vector v. Furthermore, let D be a
linear transformation such that Ds is sparse. In that
case g(s
?
) = kDs
?
k
p
p
is a frequently used regulariza-
tion term for problem (2). For example, D may serve
as a basis transformation as in classical Compres-
sive Sensing, (Cand
`
es and Romberg, 2007; Donoho,
253
Kleinsteuber M. and Hawe S. (2012).
TRACKING SOLUTIONS OF TIME VARYING LINEAR INVERSE PROBLEMS.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 253-257
DOI: 10.5220/0003864102530257
Copyright
c
SciTePress

2006) or as a discretized form of the total variation
(Combettes and Pesquet, 2004; Rudin et al., 1992).
Many approaches to tackle problem (2) rely on
the convexity of g, like NESTA (Becker et al., 2009),
conjugate subgradient methods (Hawe et al., 2011) or
TwIST (Bioucas-Dias and Figueiredo, 2007), just to
mention a few. That is the reason why the `
1
-norm
is most commonly employed. Although this convex
relaxation leads to perfect signal recovery under cer-
tain assumptions, cf. (Donoho and Elad, 2003), it has
been shown in (Chartrand and Staneva, 2008) that in
some cases, the `
p
-norm for 0 ≤ p < 1 severely out-
performs its convex counterpart.
In this work, we do not assume convexity of g but
we require differentiability. For the `
p
-norm, this can
easily be achieved by a suitable smooth approxima-
tion. Here, we propose an approach based on mini-
mizing the unconstrained Lagrangian form of (2) that
is given by
minimize
s
?
∈R
n
f (s
?
) =
1
2
kAs
?
− yk
2
2
+ λg(s
?
). (4)
The Lagrange multiplier λ ∈ R
+
0
weighs between the
sparsity of the solution and its fidelity to the acquired
samples according to λ ∼ ε.
Consider now a sequence of linear inverse prob-
lems whose solutions vary smoothly over time. As
an example, one may think of the denoising of short
video sequences or the reconstruction of compres-
sively sensed magnetic resonance image sequences,
cf. (Lustig et al., 2007). In this work, we propose an
approach to track the solutions of time varying linear
inverse problems. We employ preceding solutions to
predict the current signal’s estimate. To the best of
the authors’ knowledge, this idea has not been pur-
sued so far in the literature. The crucial idea is to use
a discretized Newton flow to track solutions of a time
varying version of (4). We provide three practical up-
date formulas for the tracking problem and conclude
with a proof of concept by applying our approach to
a short synthetic video sequence, where each video
frame is recovered from compressively sampled mea-
surements.
2 TRACKING THE SOLUTIONS
2.1 Problem Statement
Let t 7→ s(t) ∈ R
n
be a C
1
-curve i.e. with continuous
first derivative that represents a time varying signal
s. Moreover, let y(t) = As(t) be the measurements
of s at time t. In this paper, we consider the prob-
lem of reconstructing a sequence of signals
s(t
k
)
k∈N
at consecutive instances of time. Instead of estimat-
ing s(t
k
) by solving the inverse problem based on the
measurements y(t
k
), we investigate in how far the pre-
viously recovered estimates s
?
i
of s(t
i
), i = 1,... , k can
be employed to predict s(t
k+1
) without acquiring new
measurements y(t
k+1
). This prediction step may serve
as an intermediate replacement for this reconstruction
step or it may be employed as an initialization for re-
construction at time t
k
. Note that in our approach, we
assume a fixed measurement matrix A.
Consider the time variant version of the uncon-
strained Lagrangian function
f (s
?
,t) =
1
2
kAs
?
− y(t)k
2
2
+ λg(s
?
). (5)
The minimum of (5) at time t necessarily yields the
gradient
F(s
?
,t) :=
∂
∂s
?
f (s
?
,t) (6)
to be zero. Consequently, we want to find the smooth
curve s
?
(t) such that
F(s
?
(t),t) = 0. (7)
In other words, we want to track the minima of (5)
over time. A discretized Newton flow, which is ex-
plained in the following subsection, will be used for
that purpose.
2.2 Discretized Newton Flow
Homotopy methods are a well-known approach for
solving problem (7). These methods are based on
an associated differential equation whose solutions
track the roots of F. To make the paper self con-
tained, we shortly rederive the discretized Newton
flow for our situation at hand based on (Baumann
et al., 2005). Specifically, we consider the implicit
differential equation
J
F
(s
?
,t)
˙
s
?
+
∂
∂t
F(s
?
,t) = −αF(s
?
,t), (8)
where α > 0 is a free parameter that stabilizes the dy-
namics around the desired solution. Here,
J
F
(s
?
,t) :=
∂
∂s
?
F(s
?
,t) (9)
is the (n × n)-matrix of partial derivatives of F with
respect to s
?
. Under suitable invertibility conditions
on J
F
, we rewrite (8) in explicit form as
˙
s
?
= −J
F
(s
?
,t)
−1
αF(s
?
,t) +
∂
∂t
F(s
?
,t)
. (10)
We discretize (10) at time instances t
k
, for k ∈ N and
assume without loss of generality a fixed stepsize h >
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
254

0. Depending on the stepsize we choose α :=
1
h
. With
the shorthand notation for s
?
k
:= s
?
(t
k
), the single-step
Euler discretization of the time-varying Newton flow
is therefore given as
s
?
k+1
= s
?
k
−
J
F
(s
?
k
,t
k
)
−1
F(s
?
k
,t
k
) + h
∂F
∂t
(s
?
k
,t
k
)
. (11)
We approximate the partial derivative
∂F
∂t
(s
?
k
,t
k
) by
an m
th
-order Taylor approximation H
m
(s
?
,t). For the
practically interesting case these are, cf. (Baumann
et al., 2005)
H
1
(s
?
,t) =
1
h
F(s
?
,t) − F(s
?
,t − h)
(12)
H
2
(s
?
,t) =
1
2h
3F(s
?
,t) − 4F(s
?
,t − h)
+ F(s
?
,t − 2h)
(13)
H
3
(s
?
,t) =
1
30h
37F(s
?
,t) − 45F(s
?
,t − h)
+ 9F(s
?
,t − 2h) − F(s
?
,t − 3h)
(14)
These approximations turn (11) into the update for-
mula
s
?
k+1
= s
?
k
−
J
F
(s
?
k
,t
k
)
−1
F(s
?
k
,t
k
) + hH
m
(s
?
k
,t
k
)
. (15)
2.3 Explicit Update Formulas
In this subsection we derive concrete update formulas
for tracking the solution of inverse problems as de-
fined in (5).
Often the inverse J
F
(s
?
k
,t
k
)
−1
is not accessible or
infeasible to calculate, in particular when dealing with
high dimensional data. Hence for computing the esti-
mate s
∗
k+1
as in equation (15), we solve
minimize
s∈R
n
kJ
F
(s
?
k
,t
k
)s − b
m
(s
?
k
,t
k
)k
2
2
, (16)
with
b
m
(s
?
k
,t
k
) := J
F
(s
?
k
,t
k
)s
?
k
−
F(s
?
k
,t
k
) + hH
m
(s
?
k
,t
k
)
. (17)
Typically, linear Conjugate Gradient methods ef-
ficiently solve this linear equation, (Nocedal and
Wright, 2006). Note, that this is less computational
expensive compared to solving an individual recon-
struction by minimizing (4).
We now derive three explicit update schemes for
the concrete problem of tracking solutions to inverse
problems based on the approximations (12)-(14).
Let ∇g denote the gradient of g. Then from (5) we
obtain
F(s
?
,t) = A
>
(As
?
− y(t)) + λ∇g(s
?
). (18)
The derivative of F with respect to s
?
is thus
J
F
(s
?
,t) = A
>
A +λH
g
(s
?
), (19)
where H
g
(s
?
) denotes the Hessian of g at s
?
. Combing
equation (18) with (12)-(14) yields
hH
1
(s
?
,t) = A
>
y(t −h) − y(t)
(20)
hH
2
(s
?
,t) =
1
2
A
>
4y(t −h) − 3y(t) − y(t − 2h)
(21)
hH
3
(s
?
,t) =
1
30
A
>
45y(t −h) − 37y(t)
− 9y(t −2h) + y(t − 3h)
. (22)
This results in the explicit formulas for b
1
,b
2
,b
3
b
1
(s
?
k
,t
k
) = λ
H
g
(s
?
k
)s
?
k
− ∇g(s
?
k
)
+ A
>
(2y(t
k
) + y(t
k−1
)
(23)
b
2
(s
?
k
,t
k
) = λ
H
g
(s
?
k
)s
?
k
− ∇g(s
?
k
)
+
1
2
A
>
5y(t
k
) − 4y(t
k−1
) + y(t
k−2
)
(24)
b
3
(s
?
k
,t
k
) = λ
H
g
(s
?
k
)s
?
k
− ∇g(s
?
k
)
+
1
30
A
>
67y(t
k
) − 45y(t
k−1
)
+ 9y(t
k−2
) − y(t
k−3
)
. (25)
The three different explicit update formulas follow
straightforwardly
s
?
k+1
= arg min
s∈R
n
kJ
F
(s
?
k
,t
k
)s − b
m
(s
?
k
,t
k
)k
2
2
. (26)
3 EXPERIMENTS
In this section we provide an example as a proof of
concept of our proposed algorithm. It consists of
tracking the reconstruction result of a series of com-
pressively sampled time varying images s(t
k
) ∈ R
n
.
The images are created synthetically and show a ball
moving with constant velocity, see Figure 1. To en-
hance legibility, all formulas are expressed in terms
of matrix vector products. However, regarding the
implementation, we want to emphasize that filtering
techniques are used to deal with the large image data.
Considering the measurement matrix A, we take
m n randomly selected coefficients of the Rudin-
Shapiro transformation (RST) (Benke, 1994). The
TRACKING SOLUTIONS OF TIME VARYING LINEAR INVERSE PROBLEMS
255
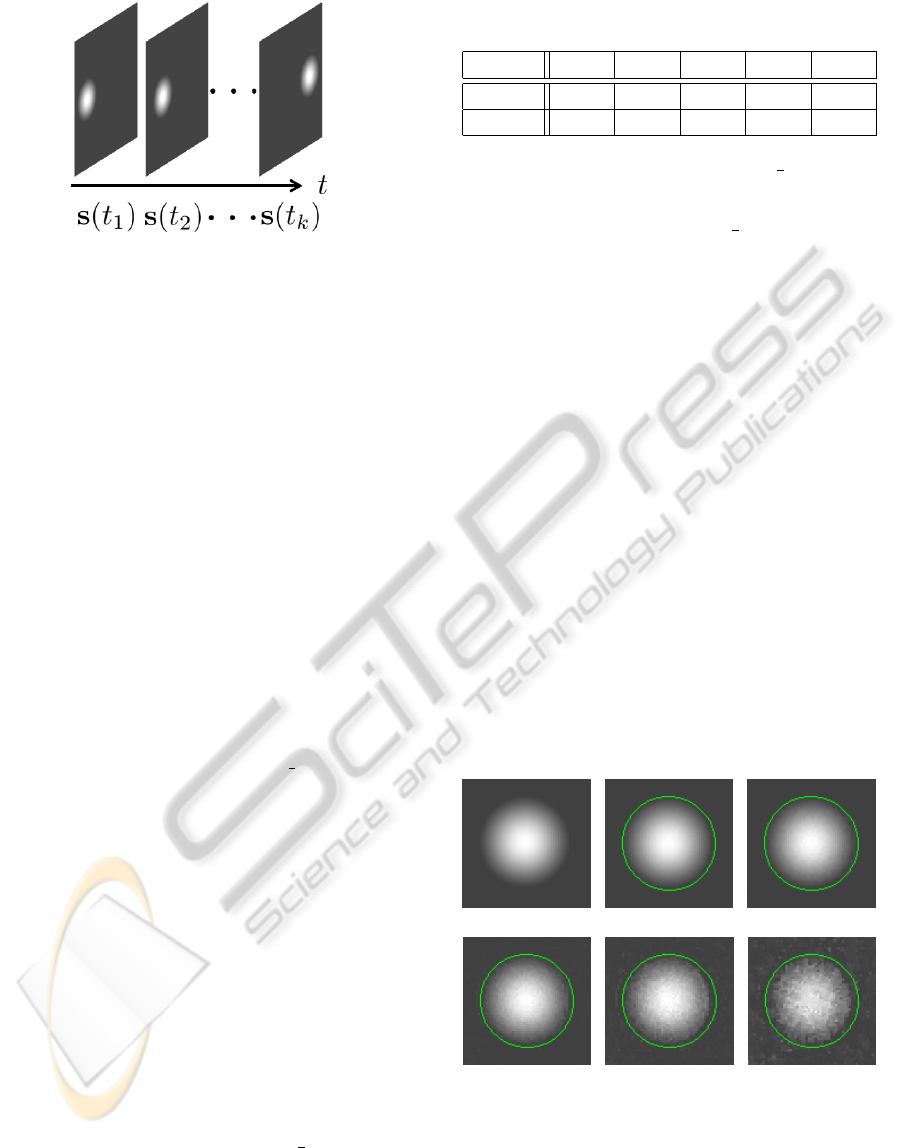
Figure 1: Time sequence of synthetic test image.
RST, also know as the real valued Dragon-Noiselet-
transformation, is used because of its efficient im-
plementation and due to its desirable properties for
image reconstruction (Romberg, 2008). We empiri-
cally set the number of measurements to m = 0.2n.
In our experiments we found that the number of mea-
surements does not severely affect the accuracy of the
tracking algorithm, but the speed of convergence. The
larger we chose m the faster the algorithm converges.
Regarding the regularization term g, we exploit
the fact that most images have a sparse gradient.
The simplest way of approximating the image gra-
dient is in terms of finite differences between neigh-
boring pixels in horizontal, and vertical direction re-
spectively. The computation of the finite differences
can be formulated as Ds with a suitable matrix D ∈
R
2n×n
.
To measure the sparsity of the gradient, we em-
ploy a smooth approximation of the `
p
-pseudo-norm
of Ds defined as
g(s) =
2n
∑
i=1
(e
i
Ds)
2
− µ
p
2
, (27)
with 0 < p ≤ 1 and a smoothing parameter µ ∈ R
+
.
The vector e
i
∈ R
2n
is a unit vector where the i
th
com-
ponent is equal to one and the others are zero. For
p = 1, equation (27) is a smooth approximation of the
well known anisotropic total-variation pseudo-norm.
We start our tracking algorithm by measuring RST
coefficients at consecutive instances of time y(t
k
) =
As(t
k
). From these consecutive measurements we
find s
?
k
by individually solving (5) using a Conju-
gate Gradient (CG) method with backtracking line-
search and Hestenes-Stiefel update rule (Nocedal and
Wright, 2006). Explicitly, the gradient of the pro-
posed regularizer (27) is
∇g(s) = D
>
2n
∑
i=1
p E
i
(e
>
i
Ds)
2
+ µ
p
2
−1
Ds, (28)
where E
i
:= e
i
e
>
i
. The Hessian of g is given by
Table 1: PSNR in dB and MSE between estimated signal
s
?
k+ j
for j = 1, . .. , 5 and original signals s(t
k+ j
) j = 1, . .. , 5.
s
?
k+1
s
?
k+2
s
?
k+3
s
?
k+4
s
?
k+5
PSNR 57.2 51.5 34.9 33.3 29.0
MSE 0.12 0.45 20.8 30.3 80.2
H
g
(s) = D
>
2n
∑
i=1
pE
i
(e
>
i
Ds)
2
+ µ
p
2
−1
+ (p − 2)
(e
>
i
Ds)
2
+ µ
p
2
−2
(e
>
i
Ds)
2
D
=: D
>
Q D. (29)
From this, we obtain s
?
k+1
by (26), using a linear
CG-method. Regarding the update formula for b
m
,
we found in our experiments that (24) yields a good
trade-off between prediction results and computa-
tional burden.
The tracking results for our example are presented
in Figure 2(b)-(f) for p = 0.7. We use the knowledge
of s(t
k
), s(t
k−1
) and s(t
k−2
) to iteratively estimate s
?
k+ j
for j = 1, . .., 5 only based on the update formula
(26). Clearly, the smaller j is, the better the estima-
tion. Note that the results shown in Figure 2(e)-(f)
are solely based on previously predicted images. The
green circle indicates the position of the ball in the
original images s(t
k+ j
), j = 1, . . . , 5. It can be seen
that although the quality of the images decreases, the
position of the circle is still captured adequately. As a
quantitative measure of the reconstruction quality, Ta-
ble 1 contains the peak signal to noise ratio (PSNR)
and the mean squared error (MSE) of the estimated
signals to the original signals.
(a) s(t
k
) (b) s
?
k+1
(c) s
?
k+2
(d) s
?
k+3
(e) s
?
k+4
(f) s
?
k+5
Figure 2: Excerpt of original image (a) and estimated im-
ages (b)-(f). The green circle indicates the position of the
ball in the original images.
A final word on the computational cost of the al-
gorithm. Considering the cost for applying the Hes-
sian operator as defined in (29), it mainly depends on
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
256

the cost of applying D and its transposed, as the ma-
trix Q is just a diagonal operator that can be applied in
O(n) flops. Furthermore, we want to mention that any
sparsifying transformation D that admits a fast imple-
mentation e.g. the Wavelet or Curvelet transformation
for images, can be easily used within this framework.
4 CONCLUSIONS
In this paper we present a concept for tracking the so-
lutions of inverse problems that vary smoothly over
time. The tracking is achieved by employing a dis-
cretized Newton flow on the gradient of the cost func-
tion. The approach allows us to predict the signal at
the next time instance from previous reconstruction
results without explicitly taking new measurements.
One advantage is that this prediction step is computa-
tionally less expensive than an individual reconstruc-
tion.
REFERENCES
Baumann, M., Helmke, U., and Manton, J. (2005). Reliable
tracking algorithms for principal and minor eigenvec-
tor computations. In 44th IEEE Conference on Deci-
sion and Control and European Control Conference,
pages 7258–7263.
Becker, S., Bobin, J., and Cand
`
es, E. J. (2009). Nesta: a fast
and accurate first-order method for sparse recovery.
SIAM Journal on Imaging Sciences, 4(1):1–39.
Benke, G. (1994). Generalized rudin-shapiro systems. Jour-
nal of Fourier Analysis and Applications, 1(1):87–
101.
Bioucas-Dias, J. and Figueiredo, M. (2007). A new twist:
Two-step iterative shrinkage/thresholding algorithms
for image restoration. Image Processing, IEEE Trans-
actions on, 16(12):2992 –3004.
Cand
`
es, E. J. and Romberg, J. (2007). Sparsity and inco-
herence in compressive sampling. Inverse Problems,
23(3):969–985.
Chartrand, R. and Staneva, V. (2008). Restricted isometry
properties and nonconvex compressive sensing. In-
verse Problems, 24(3):1–14.
Combettes, P. L. and Pesquet, J. C. (2004). Image restora-
tion subject to a total variation constraint. IEEE Trans-
actions on Image Processing, 13(9):1213–1222.
Donoho, D. L. (2006). Compressed sensing. IEEE Trans-
actions on Information Theory, 52(4):1289–1306.
Donoho, D. L. and Elad, M. (2003). Optimally sparse
representation in general (nonorthogonal) dictionar-
ies via `
1
minimization. Proceedings of the National
Academy of Sciences of the United States of America,
100(5):2197–2202.
Elad, M., Milanfar, P., and Rubinstein, R. (2007). Analysis
versus synthesis in signal priors. Inverse Problems,
3(3):947–968.
Hawe, S., Kleinsteuber, M., and Diepold, K. (2011). Dense
disparity maps from sparse disparity measurements.
In IEEE 13th International Conference on Computer
Vision.
Lustig, M., Donoho, D., and Pauly, J. M. (2007). Sparse
MRI: The application of compressed sensing for rapid
MR imaging. Magnetic Resonance in Medicine,
58(6):1182–1195.
Nocedal, J. and Wright, S. J. (2006). Numerical Optimiza-
tion, 2nd Ed. Springer, New York.
Romberg, J. (2008). Imaging via compressive sampling.
IEEE Signal Processing Magazine, 25(2):14–20.
Rudin, L. I., Osher, S., and Fatemi, E. (1992). Nonlinear
total variation based noise removal algorithms. Phys.
D, 60(1-4):259–268.
TRACKING SOLUTIONS OF TIME VARYING LINEAR INVERSE PROBLEMS
257
