
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR
MOBILE ROBOTS
Xin Wang, Maja Rudinac and Pieter P. Jonker
Delft Biorobotics Lab, Delft University of Technology, Delft, The Netherlands
Keywords:
Unknown Environment, Saliency Detection, Tracking, Online Object Segmentation, Mobile Robots, Conver-
gent Vision System.
Abstract:
In this paper we present a novel vision system for object-driven and online learning based segmentation of
unknown objects in a scene. The main application of this system is for mobile robots exploring unknown
environments, where unknown objects need to be inspected and segmented from multiple viewpoints. In an
initial step, objects are detected using a bottom-up segmentation method based on salient information. The
cluster with the most salient points is assumed to be the most dominant object in the scene and serves as an
initial model for online segmentation. Then the dominant object is tracked by a Lucas-Kanade tracker and the
object model is constantly updated and learned online based on Random Forests classifier. To refine the model
a two-step object segmentation using Gaussian Mixture Models and graph cuts is applied. As a result, the
detailed contour information of the dominant unknown object is obtained and can further be used for object
grasping and recognition. We tested our system in very challenging conditions with multiple identical objects,
severe occlusions, illumination changes and cluttered background and acquired very promising results. In
comparison with other methods, our system works online and requires no input from users.
1 INTRODUCTION
One of the most challenging problems in robotics is
the exploration of unknown environments. Robots
need to be able to navigate in the environments, ex-
plore present objects and learn them online. The first
problem that needs to be solved is how to efficiently
localize the unknown objects in the environment and
obtain their detailed information such as shape. This
is necessary for tasks such as grasping, recognition or
learning of unknown objects.
For the localization of unknown objects in a scene,
no top-down knowledge can be used. Object detec-
tion methods based on point clouds calculated from
stereo images (Bj
¨
orkman and Kragic, 2010) provide
good results in the case of the textured objects. How-
ever, they fail in the case of objects with uniform
color which are widely present in environments. As
a solution to this challenging problem, we therefore
consider bottom-up visual-attention methods. The
saliency method presented in (Itti et al., 1998) was
used, for instance, in (Rasolzadeh et al., 2010) to
guide the attention of a robot. An attention method
based on local symmetry in the image was proposed
in (Kootstra et al., 2010) to fixate on objects in the
scene. Finally, the method (Rudinac and Jonker,
2010) provides fast segmentation of objects based on
their saliency. Since it assumes no prior information
about the scene and only requires input from a single
camera, we will further exploit it in the initial step.
Once, the initial position of object is calculated,
the robots should be able to navigate around the
objects to inspect them from multiple viewpoints.
Therefore, very fast and robust object detection meth-
ods must be applied. There are various challenges the
object detection method needs to cope with: scale
changes, viewpoint changes, variable illuminations,
occlusion and background clutter. Many object de-
tection methods have been proposed and studied. The
most popular ones are motion based tracking, back-
ground subtraction, feature based detection, color
based detection and contour based detection. In the
state of the art, the Adaptive Boosting Classification
(Kalal et al., 2009) and sparse coding (Mairal et al.,
2010) are extensively used in online active vision ap-
proaches. They use the initial model to generate train-
ing models to confront viewpoint changes as well as
the occlusion. However, they need input from users
and do not provide detailed information about the
contour and the shape of the object.
In our application, we are interested in a mo-
bile robot system that can autonomously explore un-
365
Wang X., Rudinac M. and P. Jonker P..
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR MOBILE ROBOTS.
DOI: 10.5220/0003866803650374
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 365-374
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

known environments. Therefore, an online detec-
tion method that allows automatic segmentation of
unknown objects is indispensable. Most of the state
of the art methods require user defined object model,
which is unusable in our case. The robot has the
task to navigate around the unknown objects to in-
spect them from different viewpoints. For this on-
line segmentation task, existing background subtrac-
tion methods (Zivkovic, 2004) will fail because of a
constant change of the background. Motion based
online segmentation (Mooser et al., 2007) is not an
option since the objects in the environment are static
without any motion information. Thus a model based
tracker which can update online is needed. How-
ever histogram based online segmentation such as
Camshift (Bradski, 1998) can not handle textured ob-
jects. Therefore we require an object-driven segmen-
tation method which is able to work in case of com-
plex scenes and objects.
In this paper, we present a novel system for ro-
bust online segmentation of unknown objects which
can overcome all above mentioned difficulties. The
main contributions are as follows. Firstly, we im-
plement a vision system that can autonomously per-
ceive objects in unknown environments without any
prior knowledge. Secondly, we propose a robust on-
line segmentation method by utilizing different ob-
ject detection methods in order to achieve a good
performance in spite of viewpoint changes, illumi-
nation changes, background clutter as well as occlu-
sion. Our method also provides refined information
about the objects such as shapes and contours instead
of only locations. Thirdly, in our setup the camera
moves around the static objects, which is in contrast
to most active vision applications where static cam-
eras track or segment the moving objects. Further-
more, we tested the system on foveated vision setup
and achieved very promising results.
This paper is organized as follows. In Sec. 2 we
provide a general outline of the proposed system; in
Sec. 3 we explain the algorithms in detail; in Sec. 4
we show system evaluation and results analysis.
2 GENERAL FRAMEWORK
In this section we present a general framework of the
system, depicted in Figure 1. We propose several
steps: detection of a dominant unknown object, initial
model generation, tracking to update the object model
and detailed object segmentation. We assume that no
initial knowledge on a scene or objects is given.
In the initial step it is necessary to detect the ap-
proximate positions of unknown objects. For ini-
tial segmentation, we propose a bottom-up segmen-
tation based on the salient information in the static
scene. After the saliency map of the scene is cal-
culated, saliency points in the map are detected and
clustered into salient regions, where every region rep-
resents a potential unknown object. A cluster with the
most salient points is assumed to be the most dom-
inant object in the scene and its initial model is ex-
tracted to be used for later segmentation. Details can
be found in Sec. 3.1 A camera is then maneuvered
around the dominant object to explore it from differ-
ent viewpoints. In each frame, the dominant object
is tracked by motion based tracker, and the model
of the object is rebuilt and constantly updated using
Random Forests based classification. By combining
the detection results of the motion tracking and the
model tracking the location of the object in the new
frame is derived. More detailed information is given
in Sec. 3.2.1 In the final step, for every viewpoint
and updated object model we do refined object seg-
mentation. The Gaussian Mixture Models(GMMs) is
used to create the object model and the background
model. Finally the graph cuts is used to obtain the op-
timal segmentation as is described in Sec. 3.2.2. As
a result, detailed contour information of the dominant
object is extracted.
3 APPROACH AND
IMPLEMENTATION
3.1 Salient Object Detection
In order to be able to learn novel objects in un-
structured environments, an initial step is to correctly
segment the objects without any prior knowledge
about the objects or their background. In our pre-
vious research (Rudinac and Jonker, 2010), we pro-
posed a method for fast object segmentation based
on the salient information in the scene. In the orig-
inal method (Hou and Zhang, 2007), saliency was de-
tected using a spectral residual approach on three dif-
ferent color channels, red-green, yellow-blue, and the
illumination channel. The saliency map was further
calculated as the inverse Fourier transform of each
spectral residual, and the results were combined to
obtain a more robust saliency map. The bright spots
in the saliency map represent points of interest. In or-
der to detect those peaks, we applied the MSER blob
detector (Matas et al., 2004) directly on the saliency
map. Once the interesting points were detected, close
points were clustered together using Parzen window
estimation, leading to the segmentation of objects in
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
366
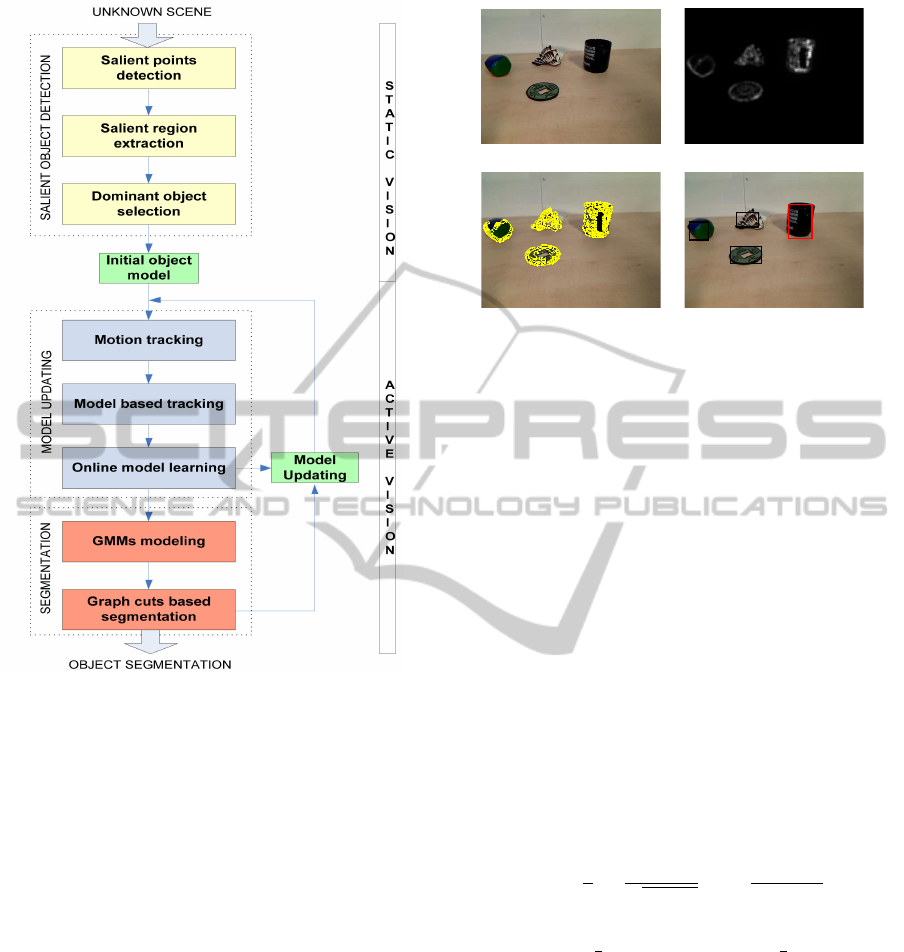
Figure 1: General outline of the system.
the scene.
The described method was designed for still im-
ages and here we propose an extension to process
video. Given that the spectral residual process rep-
resents the difference between the original scene in
Figure 2(a) and the scene average, acquiring informa-
tion about the scene average from successive frames
will improve the saliency map. The saliency map is
displayed in Figure 2(b). Therefore, for each frame
we detect MSER points on the saliency map in the
standard way and merge the result with those from
previous frames to obtain more stable salient points.
In our setup we used 5 successive frames. The num-
ber of merging frames must be carefully chosen, since
too many frames could lead to the segmentation larger
than the object. To solve this problem, we use an
active segmentation method in addition to the initial
segmentation.
Once we obtained stable salient points from suc-
cessive frames, for each detected point the contour de-
scribing the MSER region is calculated (Matas et al.,
2004). The resulting contours can be seen as yel-
low points in Figure 2(c). These contours are then
(a) original image (b) the saliency map
(c) salient points (d) the dominant object
Figure 2: Initial localization of objects using saliency.
clustered leading to the segmentation of objects in
the scene. For clustering, we use an adapted Parzen
window estimation (Tax, 2001), which automatically
fits a probability density function to the contour cen-
ters. For each point we calculate the probability P(x)
defined by Equation 1 where x
i
and σ represent the
Gaussian kernel center and the kernel size, while S is
the number of contour centers and m = 2, since ev-
ery contour center has a two-dimensional coordinate.
Subsequently, outlier points that have low probability
values and belong to isolated clusters are removed,
as defined in Equation 2. Finally, the positions of
the contour centers and their probability values are
clustered using the Mean-shift method (Comaniciu
et al., 2002). As a result, we find the regions of inter-
est around each object in the scene, see Figure 2(d).
The cluster with the most salient points represents the
dominant region in the scene, the red bounded object
in Figure 2(d) which will further be segmented.
P(x) =
1
S
S
∑
i=1
1
√
2π
m
σ
m
exp−
k
x −x
i
k
2
2σ
2
(1)
log(P(x)) < log(
1
S
∑
S
i=1
P(x
i
)) −3var(log(
1
S
∑
S
i=1
P(x
i
))
(2)
3.2 Online Object Segmentation
In the Sec. 3.1, we proposed a method which seg-
ments the unknown objects in the scenes and selects
the most dominant one that will further be inspected
by a robot from multiple viewpoints. Based on the lo-
cation of the initial model, the robot should develop a
self-learning system by observing objects from differ-
ent perspectives and perceive its environment without
any prior knowledge. One of the necessary steps to-
wards such a system is an object-driven and on-line
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR MOBILE ROBOTS
367

learning segmentation method. In our application, ob-
jects are static while the robot navigates around ob-
jects to explore them from different viewpoints. Pure
motion based and background modeling based online
segmentation methods will fail in this situation. In
this paper, we propose a robust online object segmen-
tation method to cope with this situation. From the
initial position located by saliency, we build up the
object model using texture features and update the
model frame by frame to efficiently track the object.
Then we segment the interested object inferred from
the model using GMMs and graph cuts. We will now
explain the two steps for tracking and segmentation.
3.2.1 Build and Update the Object Model
With respect to the task of observing objects from dif-
ferent viewpoints, we need to online build up a train-
ing data set to model the object from initial object in-
formation and update the model so that it can adapt
to the constant change in object appearance. Both
methods (Kalal et al., 2010) and (Lepetit and Fua,
2006) for adaptive online tracking use Local Binary
Pattern (LBP) variants to represent the texture of the
object. The LBP features are randomly distributed on
an image patch, thus the spatial information among
the features is kept. Then the image patches are
used to train a Random Forests classifier (Breiman,
2001). Therefore the object tracking problem turns
into a foreground and background classification prob-
lem. The drawback of (Lepetit and Fua, 2006) lies in
that it needs to offline generate an affine transforma-
tion training data set from the original image to build
up the tracking model. (Kalal et al., 2010) goes a step
further and just requires a user defined bounding box
around the object and further updates the model on-
line. However, they do not provide any detail on the
object shape. In our system we propose a fully auto-
matic system which also provides shape information.
Assuming that we have an object model
M that contains a variety of model elements
(m
1
, m
2
, . . . , m
N
), each m
i
uses a group of features
( f
i1
, f
i2
, . . . , f
iK
) to encode the different appearance
of the object. The combination of model elements
can provide a more comprehensive and robust de-
scription of the object than a single model element.
Using probability theory we deduce the probability
of features based on a given object model element
P( f
i1
, . . . , f
ik
|o
i
), i = 0, 1, . . . , N.
Given a potential candidate C, we use
P(C) =
N
∏
i
P(c
i
|f
i1
, . . . , f
iK
) (3)
to denote the classification of C based on features.
According to the Bayes Theorem
P(c
i
|f
i1
, . . . , f
iK
) =
P( f
i1
,..., f
iK
|c
i
)P(c
i
)
P( f
i1
,..., f
iK
)
(4)
We assume the uniform prior P(c
i
) and the de-
nominator to be the normalized constant to ensure that
the sum of probabilities is one.
Then Equation 3 transforms into
P(C) ∝
N
∏
i
P( f
i1
, . . . , f
iK
|c
i
) (5)
Since we have the criterion to denote the object
P(O) =
N
∏
i
P( f
i1
, . . . , f
iK
|o
i
) (6)
We can assign C to the classification of object or
background. Random Forests have the structure of
fast and generalized classification, thus we use it to
build and update the model. Here, the model elements
are represented by trees and the features are nodes of
the trees.
First we cover the input salient region with an im-
age patch x
0
∈ X, where X = {x
t
,t = 0, 1, . . . , T } de-
picts the trajectory of the object, in which t is the
frame number increased by time. We use LBP as
local texture feature descriptor and randomly gener-
ate the features on the image patch to maintain the
spatial information, therefore we have the first object
model and features distribution P( f
i1
, . . . , f
ik
|o
i
), i =
0, 1, . . . , N. We can then construct the Random Forests
which has N trees. By using the Lucas-Kanade
tracker, the new location of the image patch and scale
of the object in the new frame are known. Every new
frame is scanned using an image patch. Within every
image patch we use the generated features to com-
pare with the model. From the viewpoint of Random
Forests, the search is carried out for each tree and if
the search reaches the leaf the image patch is con-
sidered to be a potential object according to the given
model element. Finally we use majority votes from all
the trees to decide if it is a confident object. Among
all confident objects in the frame, we select the most
confident ones and cluster them by distance measure-
ment using normalized cross-correlation. Then by
combining the image patch location and scale ob-
tained by Lucas-Kanade tracking and the image patch
location obtained by detector we derive the image
patch of object x
t
in the new frame.
Updating the model is an online learning proce-
dure to cope with viewpoint changes. If the image
patches detected by the detector are close to the ob-
ject, they are considered to be a positive data set and
add to the branch of the trees, otherwise they will
be treated as a negative data set and pruned from the
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
368

trees. In this way, a robust and “memorized” model is
updated.
3.2.2 Refining of the Object Model by
Segmentation
Although the position of the object is known, the in-
formation about its contour, edge or shape is still un-
known. In our application, the object segmentation
will be a cue for further tasks such as the object recog-
nition, scene understanding, object grasping as well
as convergent vision, and therefore a detailed contour
of the object is necessary. For these reasons we need
to further refine the object model and perform detailed
segmentation. With respect to existing segmentation
methods in which most of them need interaction from
users (Rother et al., 2004) and (Vezhnevets, 2005).
In order to automatize the process we use the object
model from previous part and to decrease the compu-
tation time the segmentation is not carried out frame
by frame. Object segmentation is performed only in
key frames while for other frames, we use the con-
fident segmentation from previous frame. The key
frame is determined by comparison of the current im-
age patch x
t
with the previous image patch x
t−1
. If the
displacement and the scale difference are larger than
a specified threshold, the frame t is considered to be a
key frame.
We opt for a use of RGB color images and in the
object modeling part, we combine both texture infor-
mation of an intensity image and color information .
We first apply the hard constraints to label the image
and then use soft constraints to optimize the segmen-
tation.
The task of the hard segmentation is to split the
scene into an object and a background and we adopt
the GMMs for a construction of the object and back-
ground models. The GMMs is a linear combination
of Gaussians that gives complex densities and better
characterization than histogram based methods, thus
it provides good performance even when the object
has complicated texture and color. For a known im-
age patch x
t
calculated by previous steps, we assume
that within the image patch the properties of the ob-
ject are preserved, while all pixels outside the patch
have the attributes of background. Based on this, we
derive the object GMMs and background GMMs in a
following way.
With regards to a pixel x
p
, p = 1, 2, . . . , P, the
GMMs are defined as
P(x
p
) =
K
∑
k=1
π
k
N(x
p
|µ
k
, Σ
k
) (7)
where Gaussian density N(x|µ
k
, Σ
k
) is called one
component with mean vector u
k
and covariance ma-
trix Σ
k
. π
k
is the weight. Here the mean vector u
k
is
composed of three values R, G and B while K is the
number of components. K needs to be adapted to the
scene, and more textured scenes require higher values
of K. Typically K = 5.
Since we have the initial model, we can assign
each pixel to each component in object GMMs and
background GMMs. Therefore we have the label for
all the pixels in the image.
After hard segmentation, we use energy mini-
mization to optimize the segmentation. The energy
minimization equation is
E(L) = λR(L) + B(L)
= λ
∑
p∈P
R
p
(l
p
) +
∑
(p,q)∈N
B
(p,q)
·δ(l
p
, l
q
) (8)
where L = (l
1
, . . . , l
p
, . . . , l
P
) is the label set for
each pixel. l
p
= 1 represents that p is assigned to ob-
ject and l
p
= 0 represents that p is assigned to the
background. q is one of neighboring elements of p
and δ(l
p
, l
q
) is defined as
δ(l
p
, l
q
) =
1 if l
p
6= l
q
0 otherwise
(9)
where
R
p
(l
p
) = −log P(x
p
) (10)
describes the region property based on GMMs
models.
B
(p,q)
= exp(−β||I
p
−I
q
||
2
) (11)
describes the coherence of similarity within a
region according to a distance between two pixel.
Where I
p
is the RGB value for a given pixel. λ is a pa-
rameter that relatively balance region property based
on GMMs versus region property based on similarity.
Segmentation can be now estimated as a global
minimization using graph cuts (Boykov and Jolly,
2001)
c = arg min
L
E(L) (12)
Then we have the foreground object and back-
ground. It is worth noting that the computation cost
of segmentation using graph cuts will be a challenge
for online applications. In our case, we confine back-
ground to be a region surrounding the image patch
instead of using the region of the whole image. By
doing this, we lower down the computation cost. We
also use the output of the segmentation result as a re-
fined input of the online model for more precise track-
ing.
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR MOBILE ROBOTS
369

4 TESTING AND RESULTS
4.1 Experimental Setup
In order to test the whole system, we used ground
truth data obtained from 4400 image frames in 4 dif-
ferent test scenarios. They are following: a single
object placed in the scene with uniform background,
multiple objects placed in the scene with uniform
background, a single object placed in the scene with
textured background and multiple objects placed in
the scene with texture background. We used differ-
ent objects which varied in shape (simple vs complex)
and in appearance (uniform color vs textured). It is
also worth noticing that all of the experiments were
carried out in different illumination conditions with
natural light as well as artificial light. Moreover, we
tested our system in difficult cases such as the objects
with occlusion, as well as similar objects appearing in
the same scene.
Here we also need to emphasize that in most state
of the art online segmentation methods, the cameras
are fixed to capture the motion of the objects in the
scene. On the contrary, in our experiments the objects
are static and the camera moves around the object,
which is a more challenging case. There are two types
of such active vision setups, one where the camera
moves around the objects to “see” them from differ-
ent viewpoints, and the other where the camera moves
to keep the objects in the center of the view, so called
foveated vision system. We performed experiment us-
ing both setups.
In both experimental setups, we used a Logitech
Quickcam Pro 9000 with a resolution of 320∗240 and
image capture rate 25 frames per second on x86 CPU
at 2.8 GHz. We carried out two types of experiments,
one with single camera moving around the objects and
one with the camera fixed on top of motors in order
to track the objects in the center of the view. For the
latter, we adopted two Dynamixel RX-28 motors. In
total the robot vision system has two degrees of free-
dom that can move the camera up and down, left and
right. Figure 3 shows the setup of the whole system.
As can be seen from the figure, in total there are two
cameras and three motors since our future research is
on convergent vision systems. For our experiment, we
just used one camera controlled by two motors.
The input from saliency detection will influence
how the object model is built up and updated and on
the other, the input from the object model will affect
the GMMs and further the graph-cut based segmenta-
tion performance. The three parts are strongly inter-
related, and for that reason we present total segmen-
tation results.
Figure 3: Convergent vision setup.
4.2 Saliency Detection and Online
Segmentation Results
For testing we randomly picked up 50 objects with
different color, texture and shape and put them in 88
different scenes with in total 4400 frames. Saliency
detection selected 30 dominant objects from these dif-
ferent scenes. Since saliency provides segmentation
of all objects in the scene, other objects could be in-
spected as well. Because the properties of the objects
have influence on the segmentation results, we cate-
gorized the objects into 4 different types: objects with
uniform color and simple shape, objects with uniform
color and complex shape, objects with texture and
simple shape, objects with texture and complex shape.
Afterwards we used them in 4 different test scenarios
as mentioned before.
In order to clearly demonstrate the performed
tests, with regard to the types of objects and scenes,
and to show the saliency detection and segmentation
results, we show a number of figures with both single
and multiple objects in the scenes. In each figure, we
show the original image, the image after saliency de-
tection, the image after object segmentation and one
more example of the object segmentation from a dif-
ferent viewpoint. Figure 4 shows a single object with
uniform color and simple shape in textureless scene,
while Figure 5 depicts a single object with uniform
color and complex shape in textured scene.
For the same reason, we also showed a number
of figures of the multiple objects scenes. Figure 6
shows the textureless scene with multiple objects and
the dominant object with texture and complex shape,
while Figure 7 shows the textured scene with multiple
objects and the dominant object with uniform color
and complex shape.
Table 1 presents the segmentation performance of
a single object placed in an textureless or textured
background. The rows represent the different types
of objects and the columns the types of scenes. Ta-
ble 2 shows the segmentation performance of multi-
ple objects placed in textureless and texture environ-
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
370

(original scene) (saliency)
(segmentation1) (segmentation2)
Figure 4: A single object with uniform color and simple
shape in textureless scene.
(original scene) (saliency)
(segmentation1) (segmentation2)
Figure 5: A single object with uniform color and complex
shape in textured scene.
(original scene) (saliency)
(segmentation1) (segmentation2)
Figure 6: Textureless scene with multiple objects and the
dominant object with texture and complex shape.
ment. Rows and columns are defined in a same man-
ner as in Table.1. Both tables give the overall per-
(original scene) (saliency)
(segmentation1) (segmentation2)
Figure 7: Textured scene with multiple objects and the dom-
inant object with uniform color and complex shape.
formance from all test frames. As can be seen from
very high precision rates above 90%, the proposed al-
gorithm gives a very robust segmentation of various
types of objects in different scenes. We also come to
the conclusion that in most cases, it is easier to seg-
ment the objects from textureless than from textured
scenes and it is easier to segment the dominant object
within single object background than multiple objects
background. We can also notice that the multiple ob-
ject cases show only a slight drop in precision rates.
From the perspective of different types of objects,
the uniform and simple shape objects make the task
of saliency detection nontrivial. On the other hand,
the objects with uniform color and complex shape in-
crease the segmentation difficulty. Regarding very
textured objects, saliency detection provides good re-
sults but in modeling an over-segmentation can oc-
cur, since the number of GMMs components might
be low. The case of multiple objects with textured
and complex shape is the most difficult one. How-
ever, our method gives a very good performance in all
aforementioned situations, and even in case of large
viewpoint changes.
Besides testing the active vision of moving the
camera around the objects, we also tested the foveated
vision setup. We carried out experiments in 8 differ-
ent scenes with various objects and in total 400 im-
ages. The test results show an overall precision rate
of 95.5%, which proves effectiveness of the method
on foveated active vision setup as well. One example
is shown in Figure 8.
To test robustness of segmentation in more chal-
lenging conditions, we performed tests on similar ob-
jects appearing in the same scene, occluded objects as
well as the motion of objects themselves. The testing
result of perceiving objects from different viewpoints
is shown in Figure 9. As we can see from this figure,
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR MOBILE ROBOTS
371

Table 1: Segmentation results of a single object placed in
the textureless and textured scene.
objects vs scene textureless % textured %
uniform color and
simple shape
98 96
uniform color and
complex shape
98.4 93.6
texture and simple
shape
98.4 96.4
texture and complex
shape
98 92.8
total 98.2 94.7
Table 2: Segmentation results of multiple objects placed in
the textureless and textured scene.
object vs scene textureless % textured %
uniform color and
simple shape
94 97
uniform color and
complex shape
98.3 93
texture and simple
shape
95.6 90.4
texture and complex
shape
90.8 86.4
total 94.68 91.7
(origin) (saliency)
(segmentation) (foveation)
Figure 8: Online segmentation results on foveated vision
setup.
the algorithm has good segmentation performance de-
spite the viewpoint changes. In Figure 10, regardless
of occlusion, the algorithm can correctly extract the
dominant object. Even with similar object occluded
in front of the dominant object which is shown in Fig-
ure 11, the segmentation result is still good. And Fig-
ure 12 proves that the motion of the dominant object
does not affect the performance.
During testing, we observed different situations
that were difficult to cope with and those reduced the
overall performance rate. We noticed that the seg-
mentation results depend on the property of the object
we choose. The transparent and reflective object nor-
mally give bad performance, as shown in Figure 13(a)
and 13(b). The saliency detection will also affect the
online segmentation results if the selected salient re-
gion only detects a part of the object, which could
happen in the case of multiple object scenarios con-
taining both uniform color and textured objects or if
the objects are too close to each other. Another prob-
lem that rises, is in the case of very textured objects,
the selected number of GMMs components might not
be sufficient to efficiently segment the object. The
failed case is shown in Figure 13(c). One way to
solve this problem is to introduce the measure of the
textureness of the object, since the more salient points
detected usually means the more texture of the object.
Then we can adaptively select the number of GMMs
components according to this measure. We will in-
vestigate this solution in our future work. Finally, if
the color or texture of the object is very similar to the
background, it is difficult for the algorithm to extract
it. Such example is shown in Figure 13(d). Also,
sometimes the shadow might become a part of the ob-
ject.
To conclude, the proposed method is very robust
with very high performance rates above 90% in both
textureless and textured scenes, and it can efficiently
segment both simple and complex shapes as well as
objects with uniform color or texture. Additionally,
it can cope with viewpoint changes, similar objects
appearing in the same scene, occlusion as well as the
motion of object. Finally the system provides good
results in both movable camera and foveated vision
setups.
5 CONCLUSIONS
In this paper, we propose a novel vision system for
robust online segmentation of unknown objects. Our
system automatically detects unknown objects in the
scene based on the saliency information, selects the
most salient object, builds up and updates the ob-
ject model online with movable camera, and finally
refines object model using GMMs and graph cuts.
The obtained outputs are the contours of the domi-
nant object in different viewpoints. We tested our sys-
tem in challenging conditions and the test results with
the total segmentation precision above 90% show that
our method performs well in spite of large viewpoint
changes, illumination changes, occlusion as well as
the case of similar object appearing in the same scene.
The promising results inspire us to apply our system
on mobile robots to autonomously explore, track and
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
372
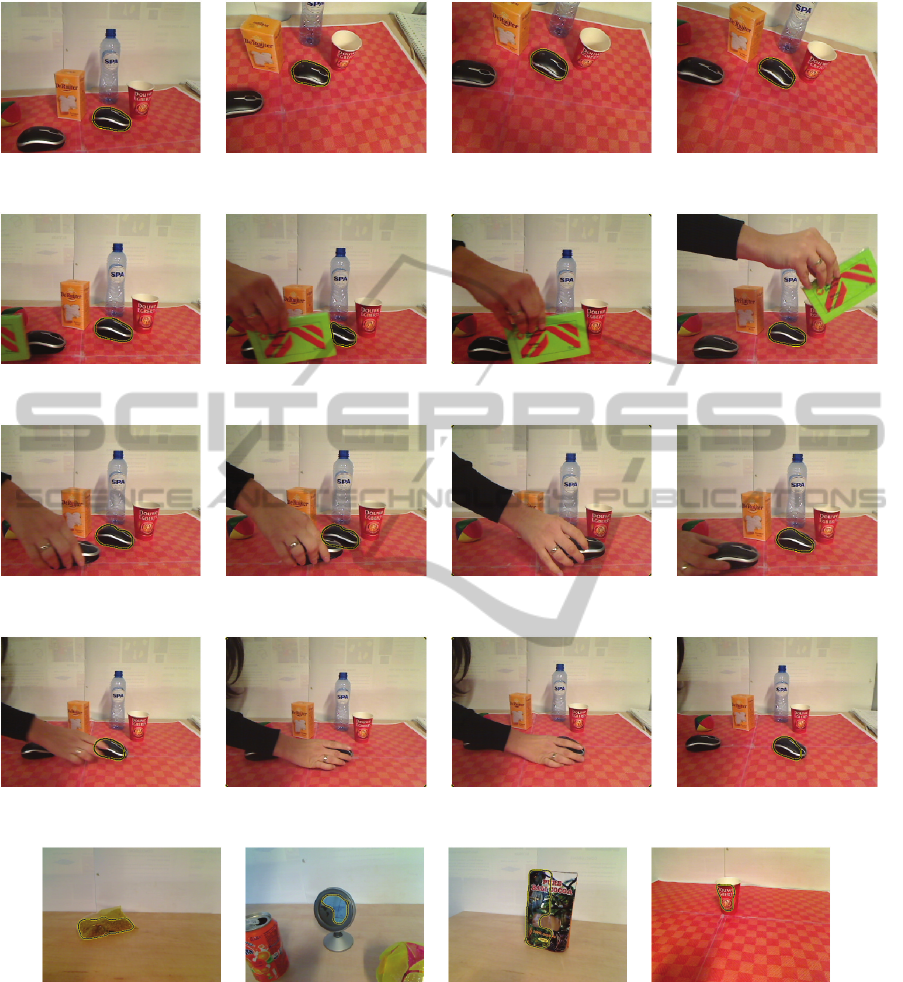
Figure 9: Online segmentation results with viewpoint changes.
Figure 10: Online segmentation results under occlusion.
Figure 11: Online segmentation results with similar objects appearing in the same scene and occlusion.
Figure 12: Online segmentation results with the motion of the dominant object.
(a) (b) (c) (d)
Figure 13: Failed cases.
segment unknown objects in unknown environments.
The output of our system also provides a strong cue
for further tasks such as object recognition, manipula-
tion and learning. The test results on foveated vision
setup also cast insight into convergent vision systems.
ACKNOWLEDGEMENTS
This research was sponsored by the Dutch govern-
ment through the Point One project PNE09003 (Bob-
bie)
ROBUST ONLINE SEGMENTATION OF UNKNOWN OBJECTS FOR MOBILE ROBOTS
373

REFERENCES
Bj
¨
orkman, M. and Kragic, D. (2010). Active 3D scene seg-
mentation and detection of unknown objects. In ICRA,
pages 3114–3120.
Boykov, Y. and Jolly, M.-P. (2001). Interactive graph cuts
for optimal boundary and region segmentation of ob-
jects in N-D images. In Computer Vision, 2001. ICCV
2001. Proceedings. Eighth IEEE International Con-
ference on, volume 1, pages 105 –112 vol.1.
Bradski, G. R. (1998). Computer Vision Face Tracking For
Use in a Perceptual User Interface. Intel Technology
Journal, (Q2).
Breiman, L. (2001). Random Forests. Machine Learning,
45:5–32.
Comaniciu, D., Meer, P., and Member, S. (2002). Mean
shift: A robust approach toward feature space analy-
sis. IEEE Transactions on Pattern Analysis and Ma-
chine Intelligence, 24:603–619.
Hou, X. and Zhang, L. (2007). Saliency detection: A
spectral residual approach. In IEEE Conference on
Computer Vision and Pattern Recognition (CVPR07).
IEEE Computer Society, pages 1–8.
Itti, L., Koch, C., and Niebur, E. (1998). A Model
of Saliency-Based Visual Attention for Rapid Scene
Analysis. IEEE Transactions on Pattern Analysis and
Machine Intelligence, 20(11):1254–1259.
Kalal, Z., Matas, J., and Mikolajczyk, K. (2009). On-
line learning of robust object detectors during unstable
tracking. In Computer Vision Workshops (ICCV Work-
shops), 2009 IEEE 12th International Conference on,
pages 1417 –1424.
Kalal, Z., Matas, J., and Mikolajczyk, K. (2010). P-N
learning: Bootstrapping binary classifiers by struc-
tural constraints. Computer Vision and Pattern Recog-
nition, IEEE Computer Society Conference on, 0:49–
56.
Kootstra, G., Bergstr
¨
om, N., and Kragic, D. (2010). Using
symmetry to select fixation points for segmentation.
In Proceedings of the 20th International Conference
on Pattern Recognition, Istanbul, Turkey, 23-26 Au-
gust 2010, pages 3894–3897.
Lepetit, V. and Fua, P. (2006). Keypoint Recognition Us-
ing Randomized Trees. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28:1465–1479.
Mairal, J., Bach, F., Ponce, J., and Sapiro, G. (2010). Online
Learning for Matrix Factorization and Sparse Coding.
J. Mach. Learn. Res., 11:19–60.
Matas, J., Chum, O., Urban, M., and Pajdla, T. (2004). Ro-
bust wide-baseline stereo from maximally stable ex-
tremal regions. Image Vision Comput., 22(10):761–
767.
Mooser, J., You, S., and Neumann, U. (2007). Real-Time
Object Tracking for Augmented Reality Combining
Graph Cuts and Optical Flow. In Mixed and Aug-
mented Reality, pages 145 –152.
Rasolzadeh, B., Bj
¨
orkman, M., Huebner, K., and Kragic, D.
(2010). An active vision system for detecting, fixating
and manipulating objects in the real world. The Inter-
national Journal of Robotics Research, 29(2-3):133–
154.
Rother, C., Kolmogorov, V., and Blake, A. (2004). ”Grab-
Cut”: interactive foreground extraction using iterated
graph cuts. In ACM SIGGRAPH 2004 Papers, SIG-
GRAPH ’04, pages 309–314, New York, NY, USA.
ACM.
Rudinac, M. and Jonker, P. P. (2010). Saliency detection
and object localization in indoor environments. In
Proceedings of the 20th International Conference on
Pattern Recognition, Istanbul, Turkey, 23-26 August
2010, pages 404–407.
Tax, D. (2001). One-class classification. phd, Delft Univer-
sity of Technology, Delft.
Vezhnevets, A. V. (2005). ”GrowCut”-Interactive Multi-
Label N-D Image Segmentation By Cellular.
Zivkovic, Z. (2004). Improved adaptive Gaussian mixture
model for background subtraction. In Pattern Recog-
nition, 2004. Proceedings of the 17th International
Conference on, volume 2, pages 28 – 31 Vol.2.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
374
