
UTILIZATION AND PERFORMANCE CONSIDERATIONS
IN RESOURCE OPTIMIZED STEREO MATCHING
FOR REAL-TIME RECONFIGURABLE HARDWARE
Fredrik Ekstrand, Carl Ahlberg, Mikael Ekstr¨om, Lars Asplund and Giacomo Spampinato
School of Innovation, Design and Technology, M¨alardalen University, Eskilstuna, Sweden
Keywords:
FPGA, Stereo-vision, Resource Utilization, Real-time.
Abstract:
This paper presents a quantitative evaluation of a set of approaches for increasing the accuracy of an area-based
stereo matching method. It is targeting real-time FPGA systems focused on low resource usage and maximized
improvement per cost unit to enable concurrent processing. The approaches areapplied to a resource optimized
correspondence implementation and the individual and cumulative costs and improvements are assessed. A
combination of the implemented approaches perform close to other area-matching implementations, but at
substantially lower resource usage. Additionally, the limitation in image size associated with standard methods
is removed. As fully piped complete on-chip solutions, all improvements are highly suitable for real-time
stereo-vision systems.
1 INTRODUCTION
The extraction of depth data through the localiza-
tion of the same point in two images is not trivial.
Stereo matching of an entire scene 30 times per sec-
ond (real-time) is computationally demanding, and
require high-performing hardware. Hardware imple-
mentations range from regular computers, to special-
ized hardware such as GPUs and FPGAs. Lazaros et
al. (Lazaros et al., 2008) make a thorough presenta-
tion of various implementations.
FPGAs, often referred to as reconfigurable paral-
lel hardware, are utilized in mobile applications us-
ing vision, as they outperform other approaches in
terms of speed, size, and power requirements. The
major obstacle is the limited resources, which re-
stricts which algorithms are possible to implement.
In general, approaches for stereo matching are di-
vided into global and local methods, with the lat-
ter being the preferred real-time stereo matching ap-
proach for a long time due to ease of implementation
and speed (Lazaros et al., 2008).
A complete vision system residing in an FPGA re-
quires several processing components just for prepro-
cessing the image, such as, image rectification, mo-
tion compensation, and depth estimation. Addition-
ally, higher-leveltasks, such as tracking, object recog-
nition, or navigation, should also be encompassed in
the FPGA.
In this paper we examine the impact of heavily re-
ducing the resource usage of a stereo matching ap-
proach. The goal is to achieve high throughput at
minimal system cost. This work is part of the Two
Camera-project at M¨alardalen University. The aim is
to construct a compact, vision-based autonomous sys-
tem encompassing both sequential and parallel pro-
cessing units (Ahlberg et al., 2011). Previous work
in the project include the construction of the FPGA-
based stereo platform (Lidholm et al., 2008), and an
implemented resource optimized basic stereo match-
ing algorithm (Ekstrand et al., 2011). The code com-
posing the components in this project will be made
available as open source to promote FPGA-based im-
age processing on our publicly available vision sys-
tem.
Matching is evaluated using stereo images with
ground truth, as shown in figure 1, and the online tool
provided by the vision department at MiddleburyUni-
versity (Evaluation, 2011).
2 BACKGROUND
For all approaches, we assume rectified and parallel
images with a unified baseline, in order to reduce the
correspondence problem to a 1-dimensional search
415
Ekstrand F., Ahlberg C., Ekström M., Asplund L. and Spampinato G..
UTILIZATION AND PERFORMANCE CONSIDERATIONS IN RESOURCE OPTIMIZED STEREO MATCHING FOR REAL-TIME RECONFIGURABLE
HARDWARE.
DOI: 10.5220/0003867404150418
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 415-418
ISBN: 978-989-8565-04-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: The Middlebury test image Tsukuba with the as-
sociated ground truth.
(Scharstein and Szeliski, 2002).
In (Ekstrand et al., 2011), we use SAD (Sum of
Absolute Differences) for a resource optimized corre-
spondence implementation for real-time systems. The
support window is reduced to a single row, thus pro-
ducing a disparity map with preserved salient details
but with increased noise, as can be expected when
compared to the standard 2D implementation. The
noise is primarily located in low-texture areas with
low signal-to-noise ratio. In fact, the approach out-
performs the 2D version around discontinuities due to
reduced foreground fattening. The major advantages
of the 1D approach are the substantial reduction in re-
source usage and the removalof the need for complete
scan-line retention. The question is by how much can
the matching quality can be improved, and at what
cost?
3 RELATED WORK
An FPGA consists of different elements that can be
configured in a multitude of ways. Resource uti-
lization is normally expressed in slices and LUTs
(LookUp-Tables which realize boolean operations).
The 1D implementation from (Ekstrand et al., 2011)
produced the disparity maps in this paper from 1.2K
slices when implemented in a Spartan-3 FPGA. This
is just above 4% of the available slices in the chip.
Several other stereo matching approaches with
low resource usage exists, such as the one proposed
by Arias-Estrada et al. (Arias-Estrada and Xicoten-
catl, 2001). The utilization is only 4.2K slices on
a Virtex-II, but the disparity map is only fair. The
implementation is capable of 71 fps with images of
320x240 pixels. Lee et al. (Sunghwan et al., 2005)
present an implementation below 10K slices in re-
source usage. The resulting disparity map is moderate
with extensive blurring of edges and noise.
4 IMPROVEMENTS
Noise in stereo matching is evident as false matches.
False matches occur from the fundamentals of match-
ing two images from different viewpoints because of
projective distortion, Kanade and Okutomi (Kanade
and Okutomi, 1994). Fusing two views together
will leave areas where depth estimation is impossi-
ble as they are occluded in one of the views. This
affects all area-based approaches, but is even more
evident for smaller support windows as they have
lower signal-to-noise ratio. Post-processing of the es-
timated disparity map is usually adopted to remove
false matches, and established methods include left-
right consistency check (LRC) (Fua, 2004), propaga-
tion, and median filtering.
Figure 2: Impact of applying LRC (left), or not (right). Both
images have been median filtered as the last stage.
4.1 Consistency Check
The left-right consistency check verifies that only
disparity values with mutual correspondence are
accepted as matches, as detailed by Fusiello et
al. (Fusiello et al., 1997). Our implementation prac-
tically doubles the resource usage for the matching
process (1.2K vs 2.4K slices), but no external mem-
ory nor any reduction in system performance need to
result from it.
Figure 3: The median filter preceding the propagation (left)
does not perform as well as the reverse (right). LRC-check
was performed initially on both images.
The effect of the consistency check can be ob-
served in figure 2. The images are with and without
consistency check, but both have median filtering per-
formed subsequently, to minimize the empty regions.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
416
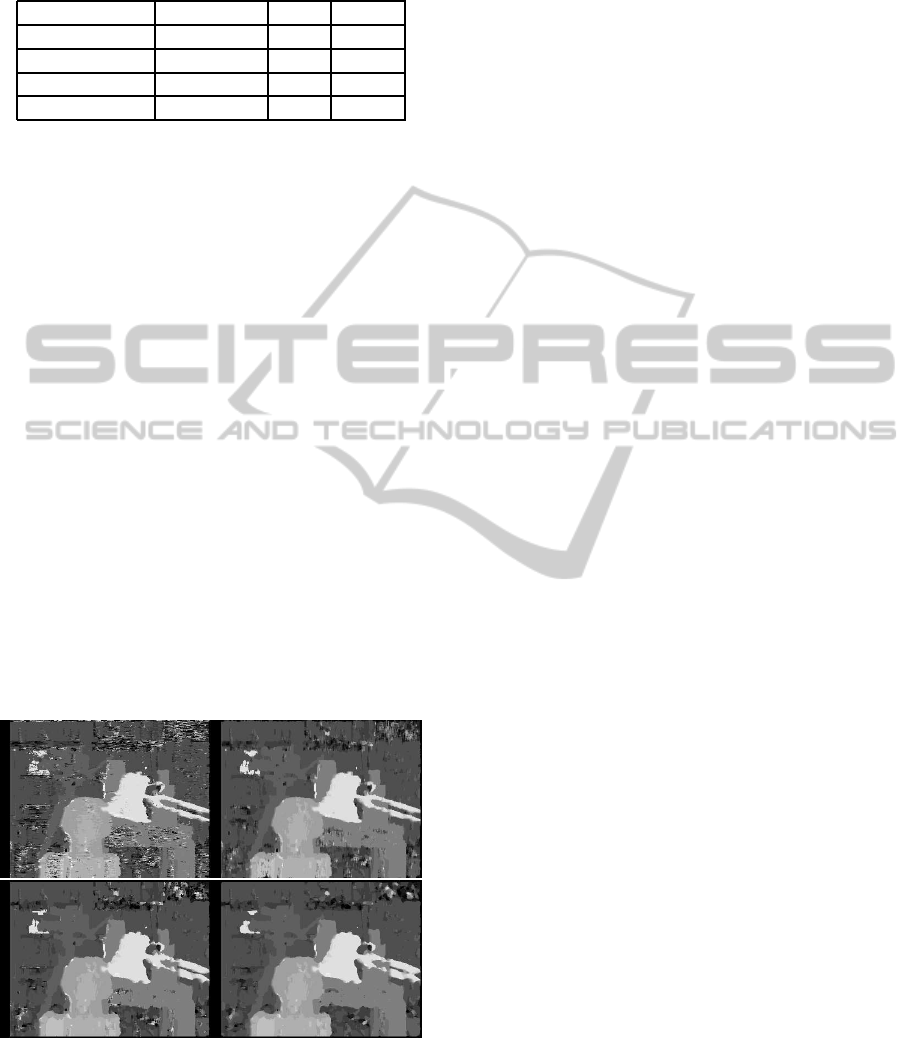
Table 1: Performance and cost for median filtering. The %
is the errors in the image compared to the ground truth for
Non-occluded, All, and regions near Discontinuities.
Approach Non-Occ % All % Disc %
SAD 7x1 29.1 30.7 27.4
SAD-MED 7x1 22.2 23.9 24.3
SAD 7x7 22.7 24.4 28.6
SAD-MED 7x7 21.9 23.6 28.1
The consistency check identifies almost all of the oc-
cluded areas. However, it also removes pixels that
are not occluded but still differ due to poor correla-
tion data. Noteworthy is the deterioration of the lamp
arm, partly due to the check but also due to the filter.
The removal of data in the disparity map reduces the
quality, and it is evident that the median filter (here a
7x1) is not filling the empty areas. For this to happen
we need to propagate.
4.2 Propagation
With propagation, the underlying data is important.
A logic assumption is that it is important to remove
as much noise as possible before performing propa-
gation, to avoid propagating false matches. As can
be seen in figure 3, there is a difference between per-
forming median filtration before or after the propaga-
tion. Propagation directly after the consistency check
followed by a median filter produces a disparity map
of the highest accuracy. However, some areas dete-
riorate, such as the lamp arm, when compared to a
non-consistency checked image.
Figure 4: The median filter (right column) significantly re-
duces the noise for the 1D (top) but not the 2D (bottom)
approach.
4.3 Filtering
Median filtering is a well-known approach to re-
move sporadic noise and is frequently used in post-
processing to improve disparity maps (Muhlmann
et al., 2002). Realization of a median filter is a search
and rank problem with large filters being difficult to
implement for real-time (Vega-Rodrguezet al., 2007).
We have implemented the median filter as a classic
systolic array, according to (Vega-Rodrguez et al.,
2007), for sorting 9 elements. This translates to a 9x1
median filter for 1D and a 3x3 filter for 2D.
The improvement with a median filter are quite
significant for the 1D approach, but not so much for
the 2D, as can be seen in figure 4 and in table 1. The
filter removes noise and the 2D implementation is al-
ready noise reduced by design. It is obvious that the
noise in the 1D approach fits the characteristics of a
median filter. Noteworthy is the fact that the 1D ap-
proach outperforms the standard 2D in regions of dis-
continuities, due to the lack of vertical summing. This
is the case already with the basic 1D, but is even more
improved with the added filter. The cost of the filter
is very low, only 247 slices, an increase of 20%. As
a conclusion, median filtering closes the gap between
1D and 2D implementations.
5 RESULT SUMMARY
Table 2 shows the improvement for the stereo match-
ing component with the implemented approaches,
both individually and combined. The improvements
are evaluated with the Middlebury stereo evaluation
tool (Evaluation, 2011) which show the error percent-
age in the disparity image. Three different parameters
are presented: Non-occluded pixels which are visi-
ble in both images; Pixel at or around discontinuities
in the image; All image pixels. From observing the
matching scores in table 2, it can be noted that the in-
dividual order of tools is important when combining
for improvement.
6 CONCLUSIONS
Utilizing an inexpensive median filter effectively
closes the gap between the 1D and the 2D approaches.
From a cost/performance perspective, only using a
median filter with the 1D is the best approach. How-
ever, there is only so much a 1D median filter can
do with noisy data. For further improvement, noise
reduction is a must. A function removing, or never
allowing, false matches in the initial disparity map,
UTILIZATION AND PERFORMANCE CONSIDERATIONS IN RESOURCE OPTIMIZED STEREO MATCHING FOR
REAL-TIME RECONFIGURABLE HARDWARE
417
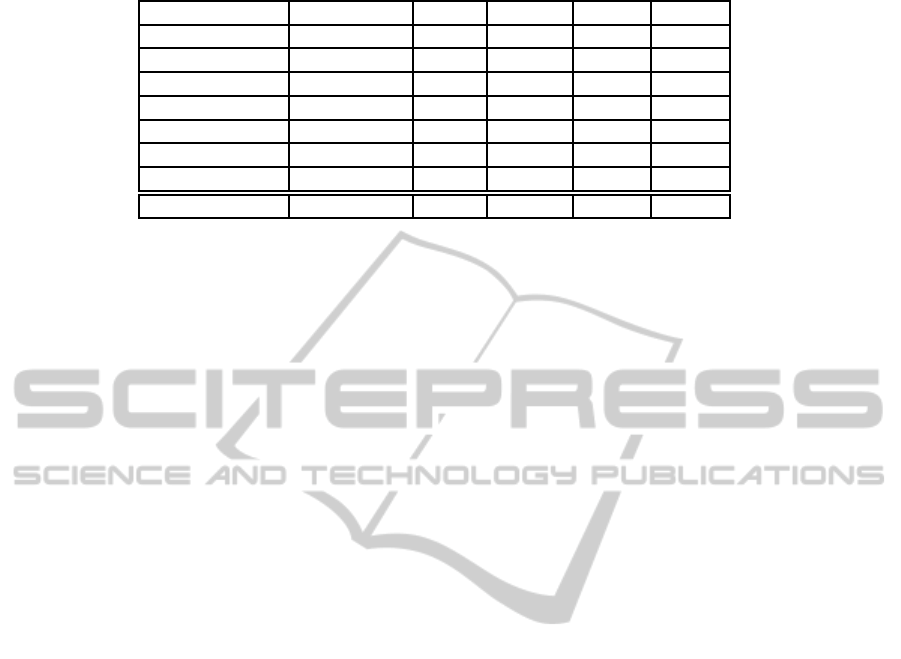
Table 2: Impact of improvements; individually and combined. All values are for a 7x1 implementation.
Approach Non-Occ % All % Disc % Slices LUTs
SAD 29.1 30.7 27.4 1,221 6,086
LRC 40.5 41.9 40.1 2,399 7,689
Median 22.2 23.9 24.3 1,468 6,371
LRC-Med 38.6 39.9 39.5 3,135 8,204
LRC-Prop 27.2 28.4 24.9 3,174 8,237
LRC-Med-Prop 31.1 32.0 28.8 3,986 8,844
LRC-Prop-Med 20.4 21.8 21.7 3,986 8,844
Available 33,280 33,280
through confidence assessment, could render a sub-
stantial improvement together with a competent prop-
agation method. Implementing a small confidence
measurement would be a good continuance of this
work.
It is further evident that it is possible to achieve
acceptable disparity maps without extensive mem-
ory usage and without a limitation on image size.
Megapixel images will not affect the throughput or
the resource utilization of the suggested approach as
image data is only stored in a shift register approach
without the need for multi-scanline retention. Fur-
thermore, the 1D implementation is resource reduced,
and can be fitted to practically any FPGA. It has been
implemented with a maximum disparity range of 64
for images of 1024x1024 pixels.
The implementations run at 125 MHz, the system
clock of the FPGA-board (Lidholm et al., 2008). As
the implementations are fully piped, the frame rate is
dependent on the speed of the cameras and the size of
the frame. Theoretically, it is capable of processing
over 100 frames per second for Megapixel images.
ACKNOWLEDGEMENTS
The authors would like to acknowledge Xilinx for
their kind donation of our FPGA’s and design soft-
ware tools, Hectronic for the design and manufactur-
ing of our FPGA boards, and The Knowledge Foun-
dation for providing funding for the project.
REFERENCES
Ahlberg, C., Spampinato, G., Lidholm, J., Ekstrand, F., Ek-
str¨om, M., and Asplund, L. (2011). Gimme - a gen-
eral image multiview manipulation engine. Technical
paper, School of Innovation Design and Engineering,
M¨alardalen University.
Arias-Estrada, M. and Xicotencatl, J. (2001). Mul-
tiple stereo matching using an extended architec-
ture. In Brebner, G. and Woods, R., editors, Field-
Programmable Logic and Applications, volume 2147
of Lecture Notes in Computer Science, pages 203–
212. Springer Berlin / Heidelberg.
Ekstrand, F., Ahlberg, C., Ekstr¨om, M., Asplund, L., and
Spampinato, G. (2011). Resource limited hardware-
based stereo matching for high-speed vision sys-
tem. In 5th International Conference on Automation
Robotics and Applications, 2011. (ICARA 2011).
Evaluation, M. U. O. S. (2011). http://vision.middlebury.ed
u/stereo.
Fua, P. (2004). A parallel stereo algorithm that produces
dense depth maps and preserves image features * ii id
ii ii / i i 111 ? 1 1 1 1. Machine Vision and Applica-
tions, 6(1993):35–49.
Fusiello, A., Roberto, V., and Trucco, E. (1997). Experi-
ments with a new area-based stereo algorithm.
Kanade, T. and Okutomi, M. (1994). A stereo matching
algorithm with an adaptive window: theory and ex-
periment. Pattern Analysis and Machine Intelligence,
IEEE Transactions on, 16(9):920 –932.
Lazaros, N., Sirakoulis, G. C., and Gasteratos, A. (2008).
Review of stereo vision algorithms: From software to
hardware. International Journal of Optomechatronics,
2(4):435–462.
Lidholm, J., Ekstrand, F., and Asplund, L. (2008). Two
camera system for robot applications; navigation. In
13th IEEE International Conference on Emerging
Technologies and Factory Automation, 2008. (ETFA
2008), pages 345–352. IEEE.
Muhlmann, K., Maier, D., Hesser, J., and Manner, R.
(2002). Calculating dense disparity maps from color
stereo images, an efficient implementation. Interna-
tional Journal of Computer Vision, 47(1):30–36.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms. International Journal of Computer Vision,
47:7–42.
Sunghwan, L., Jongsu, Y., and Junseong, K. (2005). Real-
time stereo vision on a reconfigurable system. Lecture
Notes in Computer Science, 3553:299–307.
Vega-Rodrguez, M. A., Snchez-Prez, J. M., and Gmez-
Pulido, J. A. (2007). An fpga-based implementation
for median filter meeting the real-time requirements
of automated visual inspection systems. In Proceed-
ings of the 10th IEEE Mediterranean Conference on
Control and Automation MED 02. Citeseer.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
418
