STATIC POSE ESTIMATION FROM DEPTH IMAGES
USING RANDOM REGRESSION FORESTS AND HOUGH VOTING
Brian Holt and Richard Bowden
Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, U.K.
Keywords:
Pose Estimation, Human Body, Regression Forests, Range Image, Hough Transform, Kinect.
Abstract:
Robust and fast algorithms for estimating the pose of a human given an image would have a far reaching impact
on many fields in and outside of computer vision. We address the problem using depth data that can be captured
inexpensively using consumer depth cameras such as the Kinect sensor. To achieve robustness and speed on a
small training dataset, we formulate the pose estimation task within a regression and Hough voting framework.
Our approach uses random regression forests to predict joint locations from each pixel and accumulate these
predictions with Hough voting. The Hough accumulator images are treated as likelihood distributions where
maxima correspond to joint location hypotheses. We demonstrate our approach and compare to the state-of-
the-art on a publicly available dataset.
1 INTRODUCTION
Estimation of human pose is a problem that has re-
ceived significant attention in recent years. A fast,
robust solution to the problem would have wide rang-
ing impact in gaming, human computer interaction,
video analysis, action and gesture recognition, and
many other fields. The problem remains a difficult
one primarily because the human body is a highly de-
formable object. Aditionally, there is large variability
in body shape among the population, image capture
conditions, clothing, camera viewpoint, occlusion of
body parts (including self-occlusion) and background
is often complex.
In this paper we cast the pose estimation task as a
continuous non-linear regression problem. We show
how this problem can be effectively addressed by
Random Regression Forests (RRFs). Our approach
is different to a part-based approach since there are
no part detectors at any scale. Instead, the approach
is more direct, with features computed efficiently on
each pixel used to vote for joint locations. The votes
are accumulated in Hough accumulator images and
the most likely hypothesis is found by non-maximal
suppression.
The availability of depth information from real-
time depth cameras has simplified the task of pose es-
timation (Zhu and Fujimura, 2010; Ganapathi et al.,
2010; Shotton et al., 2011; Holt et al., 2011) over tra-
ditional image capture devices by supporting high a-
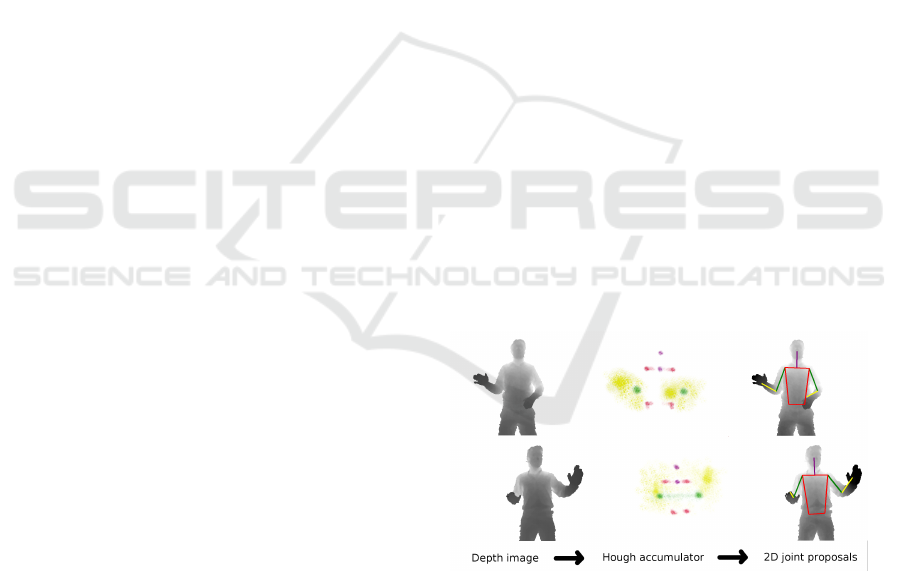
Figure 1: Overview: given a single input depth image, eval-
uate a bank of RRFs for every pixel. The output from each
regressor is accumulated in a Hough-like accumulator im-
age. Non-maximal suppression is applied to find the peaks
of the accumulator images.
ccuracy background subtraction, working in low-
illumination environments, being invariant to color
and texture, providing depth gradients to resolve am-
biguities in silhouettes, and providing a calibrated
estimate of the scale of the object. However, even
with these advantages, there remains much to done to
achieve a pose estimation system that is fast and ro-
bust.
One of the major challenges is the amount of data
required in training to generate high accuracy joint es-
timates. The recent work of Shotton et al. (Shotton
et al., 2011) constructs a training set of approximately
two billion samples from one million computer gen-
erated depth images. If each value is stored in a 32
557
Holt B. and Bowden R..
STATIC POSE ESTIMATION FROM DEPTH IMAGES USING RANDOM REGRESSION FORESTS AND HOUGH VOTING.
DOI: 10.5220/0003868005570564
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 557-564
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

bit floating point number, the size of their training set
would be 14TB, which is beyond the reach of what
most researchers could store or process. Shotton et al
make use of a proprietary distributed training archi-
tecture using 1000 cores to train their decision trees.
We propose an approach that is in many ways similar
to Shotton et al’s approach, but requires significantly
less data and processing power.
Our approach applies advances made using RRFs
reported recently in a wide range of computer vision
problems. This technique has been demonstrated by
Gall and Lempitsky (Gall and Lempitsky, 2009) to
offer superior object detection results, and has been
used successfully in applications as diverse as the es-
timation of head pose (Fanelli et al., 2011), anatomy
detection and localisation (Criminisi et al., 2011), es-
timating age based on facial features (Montillo and
Ling, 2009) and improving time-of-flight depth map
scans (Reynolds et al., 2011). To the best of our
knowledge Random Regression Forests have not been
applied to pose estimation.
The contributions of this paper are the follow-
ing. First, we show how RRFs can be combined
within a Hough-like voting framework for static pose
estimation, and secondly we evaluate the approach
against state-of-the-art performance on publicly avail-
able datasets. The paper is organised as follows: Sec-
tion 2 discusses related work, Section 3 develops the
theory and discusses the approach, Section 4 details
the experimental setup and results and Section 5 con-
cludes.
2 RELATED WORK
A survey of the advances in pose estimation can be
found in (Moeslund et al., 2006). Broadly speaking,
static pose estimation can be divided into global and
local (part-based) pose estimation. Global approaches
to discriminative pose estimation include direct re-
gression using Relevance Vector Machines (Agarwal
and Triggs, 2006), using a parameter sensitive vari-
ant of Locality Sensitive Hashing to efficiently lookup
and interpolate between similar poses (Shakhnarovich
et al., 2003), using Gaussian Processes for generic
structured prediction of the global body pose (Bo and
Sminchisescu, 2010) and a manifold based approach
using Random Forests trained by clustering similar
poses hierarchically (Rogez et al., 2008).
Many of the state of the art approaches to pose
estimation use part-based models (Sigal and Black,
2006; Tran and Forsyth, 2010; Sapp et al., 2010) .
The first part of the problem is usually formulated as
an object detection task, where the object is typically
an anatomically defined body part (Felzenszwalb and
Huttenlocher, 2005; Andriluka et al., 2009) or Pose-
lets (parts that are “tightly clustered in configura-
tion space and appearance space”) (Holt et al., 2011;
Bourdev et al., 2010; Wang et al., 2011). The sub-
sequent task of assembly of parts into an optimal
configuration is often achieved through a Pictorial
Structures approach (Felzenszwalb and Huttenlocher,
2005; Andriluka et al., 2009; Eichner et al., 2009),
but also using Bayesian Inference with belief prop-
agation (Singh et al., 2010), loopy belief propagation
for cyclical models (Sigal and Black, 2006; Wang and
Mori, 2008; Tian and Sclaroff, 2010) or a direct infer-
ence on a fully connected model (Tran and Forsyth,
2010).
Work most similar to ours includes
• Gall and Lempitsky (Gall and Lempitsky, 2009)
apply random forests tightly coupled with a
Hough voting framework to detect objects of a
specific class. The detections of each class cast
probabilistic votes for the centroid of the ob-
ject. The maxima of the Hough accumulator
images correspond to most likely object detec-
tion hypotheses. Our approach also uses Random
Forests, but we use them for regression and not
object detection.
• Shotton et al. (Shotton et al., 2011) apply an ob-
ject categorisation approach to the pose estima-
tion task. A Random Forest classifier is trained
to classify each depth pixel belonging to a seg-
mented body as being one of 32 possible cate-
gories, where each category is chosen for optimal
joint localisation. Our approach will use the same
features as (Shotton et al., 2011) since they can
be computed very efficiently, but our approach
skips the intermediate representation entirely by
directly regressing and then voting for joint pro-
posals.
• The work of (Holt et al., 2011) serves as a natu-
ral baseline for our approach, since their publicly
available dataset is designed for the evaluation of
static pose estimation approaches on depth data.
They apply an intermediate step in which poselets
are first detected, whereas we eliminate this step
with better results.
3 PROPOSED APPROACH
The objective of our work is to estimate the configura-
tion of a person in the 2D image plane parameterised
by B body parts by making use of a small training set.
We define the set of body parts B = {b
i
}
B
i=1
where
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
558
b
i
∈ ℜ
2
corresponding to the row and column of b
i
in
the image plane. The labels corresponding to B com-
prise Q = {head, neck, shoulder
L
, shoulder
R
, hip
L
,
hip
R
, elbow
L
, elbow
R
, hand
L
, hand
R
} where |Q| = B.
The novelty in our approach is twofold. Firstly,
our approach is able to learn the relationship between
the context around a point x in a training image and
the offset to a body part b
i
. Given a new point x
0
in a
test image, we can use the learned context to predict
the offset from x
0
to b
0
i
. Secondly, since the image
features that we use are weak and the human body is
highly deformable, our second contribution is to use
Hough accumulators as body part likelihood distribu-
tions where the most likely hypothesis
ˆ
b
i
is found us-
ing non-maximal suppression.
3.1 Image Features
We apply the randomised comparison descriptor of
(Amit and Geman, 1997; Lepetit and Fua, 2006; Shot-
ton et al., 2011) to depth images. While this is an
inherently weak feature, it is both easy to visualise
how the feature relates to the image, and when com-
bined with many other features within a non-linear re-
gression framework like Random Regression Forests
it yields high accuracy predictions. Given a current
pixel location x and random offsets φ = (u, v) |u| <
w, |v| < w at a maximum window size w, define the
feature
f
φ
(I, x) = I(x +
u
I(x)
) −I(x +
v
I(x)
) (1)
where I(x) is the depth value (the range from
the camera to the object) at pixel x in image I and
φ = (x
1
, x
2
) are the offset vectors relative to x. As ex-
plained in (Shotton et al., 2011), we scale the offset
vectors by a factor
1
I(x)
to ensure that the generated
features are invariant to depth. Similarly, we also de-
fine I(x
0
) to be a large positive value when x
0
is either
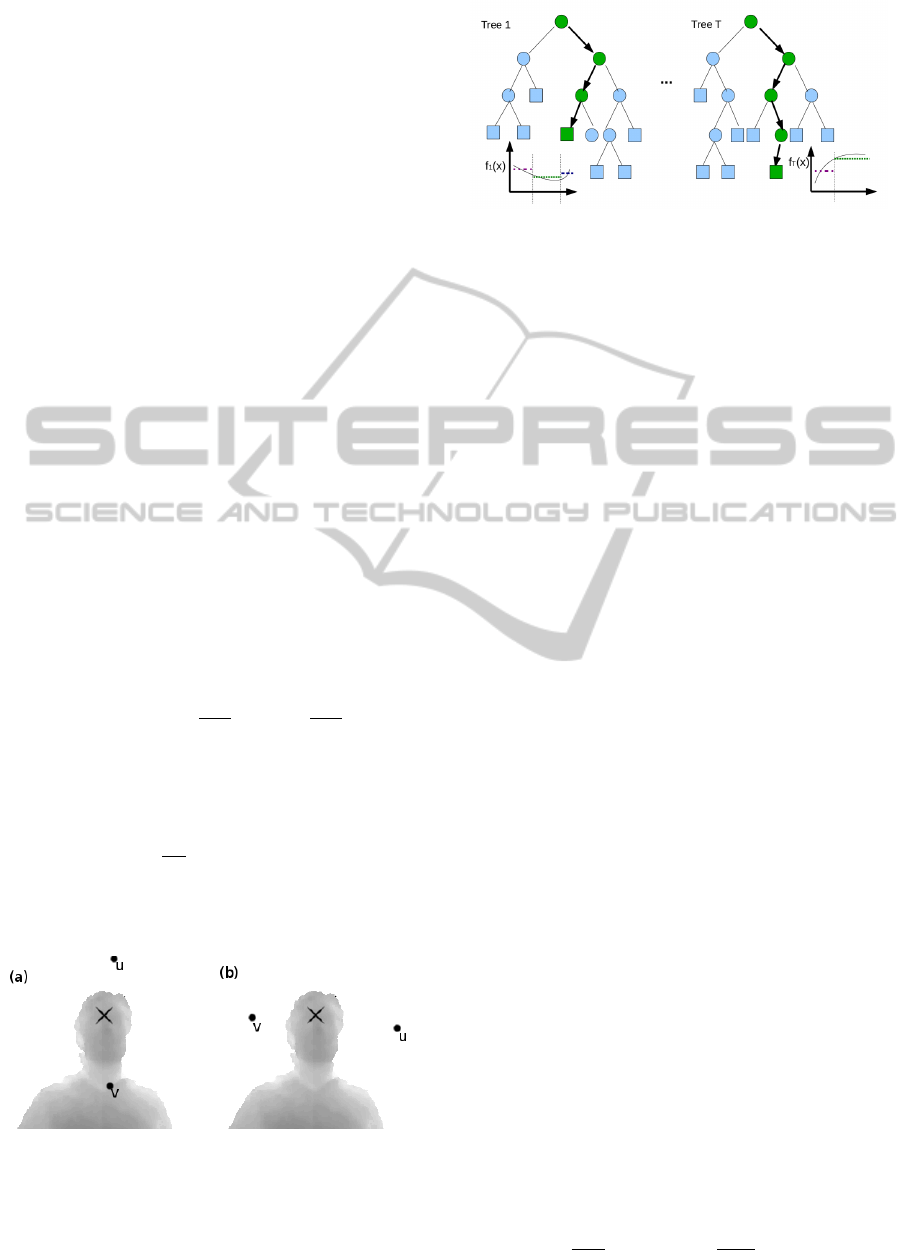
Figure 2: Image features: the most discriminative feature φ
is that which yields the greatest decrease in mean squared
error, and is therefore by definition the feature at the root
node of the tree. In (a) the pixel x is shown with these offsets
φ = (u, v) that contribute most to head
y
(the row) and in (b)
the offsets φ that contribute most to head
x
(the column).
Figure 3: Random Regression Forest: a forest is an ensem-
ble learner consisting of a number of trees, where each tree
contributes linearly to the result. During training, each tree
is constructed by recursively partitioning the input space
until stopping criteria are reached. The input subregion
at each leaf node (shown with rectangles) is then approx-
imated with a constant value that minimises the squared
error distance to all labels within that subregion. In this
toy example, the single dimension function f (x) is approx-
imated by constant values (shown in different colours) over
various regions of the input space.
background or out of image bounds.
The most discriminative features found to predict
the head are overlaid on test images in Figure 2. These
features make sense intuitively, because in Figure 2(a)
the predictions of the row location of the head depend
on features that compute the presence or absence of
support in the vertical direction and similarly for Fig-
ure 2(b) in the horizontal direction.
3.2 Random Regression Forests
A decision tree (Breiman et al., 1984) is a non-
parameteric learner that can be trained to predict cat-
egorical or continuous output labels.
Given a supervised training set consisting of p
F-dimensional vector and label pairs (S
i
, l) where
S
i
∈ R
F
, i = 1, ..., p and l ∈ R
1
, a decision tree re-
cursively partitions the data such that impurity in the
node is minimised, or equivalently the information
gain is maximised through the partition.
Let the data at node m be represented by Q. For
each candidate split θ = ( j, τ
m
) consisting of a feature
j and threshold τ
m
, partition the data into Q
le f t
(θ) and
Q
right
(θ) subsets
Q
le f t
(θ) = (x, l)|x
j
≤ τ
m
(2)
Q
right
(θ) = Q \Q
le f t
(θ) (3)
The impurity over the data Q at node m is com-
puted using an impurity function H(), the choice of
which depends on the task being solved (classification
or regression). The impurity G(Q, θ) is computed as
G(Q, θ) =
n
le f t
N
m
H(Q
le f t
(θ)) +
n
right
N
m
H(Q
right
(θ)) (4)
STATIC POSE ESTIMATION FROM DEPTH IMAGES USING RANDOM REGRESSION FORESTS AND HOUGH
VOTING
559
Select for each node m the splitting parameters θ
that minimise
θ
∗
= argmin
θ
G(Q, θ) (5)
Given a continuous target y, for node m, repre-
senting a region R
m
with N
m
observations, a common
criterion H() to minimise is the Mean Squared Er-
ror (MSE) criterion. Initially calculate the mean c
m
over a region
c
m
=
1
N
m
∑
i∈N
m
y
i
(6)
The MSE is the sum of squared differences from
the mean
H(Q) =
1
N
m
∑
i∈N
m
(y
i
− c
m
)
2
(7)
Recurse for subsets Q
le f t
(θ
∗
) and Q
right
(θ
∗
) un-
til the maximum allowable depth is reached, N
m
<
min samples or N
m
= 1.
Given that trees have a strong tendency to overfit
to the training data, they are often used within an en-
semble of T trees. The individual tree predictions are
averaged
ˆy =
1
T
T
∑
t=0
ˆy
t
(8)
to form a final prediction with demonstrably lower
generalisation errors (Breiman, 2001).
3.3 Hough Voting
Hough voting is technique that has proved very suc-
cessful for identifying the most likely hypotheses in a
parameter space. It is a distributed approach to opti-
misation, by summing individual responses to an in-
put in an parameter space. The maxima are found to
correspond to the most likely hypotheses.
Our approach uses the two dimensional image
plane as both the input and the parameter space. For
each body part q
j
∈ Q we define a Hough accumulator
{H
q
}, ∀q ∈ Q, where the dimensions of the accumu-
lator correspond to the dimensions of the input image
I: H ∈ ℜ
I
w
× ℜ
I
h
, H = 0 for all pixels.
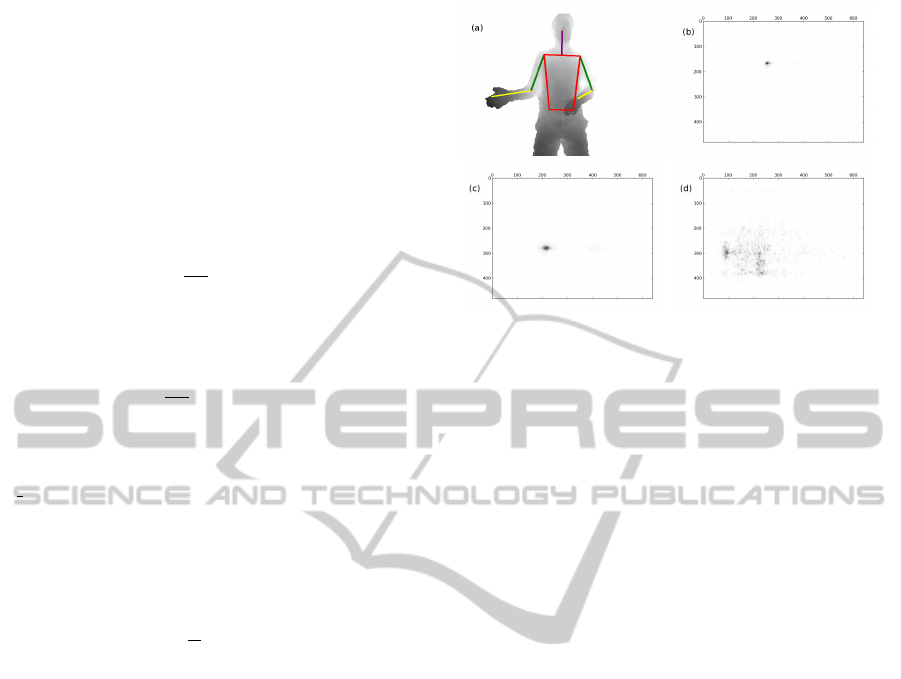
An example of the Hough voting step in our sys-
ten can be seen in Figure 4 where the final configu-
ration is shown alongside the accumulator images for
the left shoulder, elbow and hand. Note that the left
shoulder predictions are tightly clustered around the
groundtruth location, whereas the left elbow is less
certain and the left hand even more so. Neverthe-
less, the weight of votes in each case are in the correct
Figure 4: Hough accumulator images: the Hough image is
a probabilistic parameterisation that accumulates votes cast
by the RRFs. The maxima in the parameterised space cor-
respond to the most likely hypotheses in the original space.
In this example the Hough accumulator shows the concen-
tration of votes cast for the (b) left shoulder, (c) left elbow
and (d) left hand.
area, leading to successful predictions shown in Fig-
ure 4(a).
3.4 Training
Before we can train our system, it is necessary to
extract features and labels from the training data.
Firstly, we generate a dictionary of F random offsets
φ
j
= (u
j
, v
j
)
F
j=1
. Then, we construct our training data
and labels. For each image in the training set, a ran-
dom subset of P example pixels is chosen to ensure
that the distribution over the various body parts is ap-
proximately uniform. For each pixel x
p
in this random
subset, the feature vector S is computed as
S = f
φ
j
(I, x)
F
j=1
(9)
and the offset o
i
∈ ℜ
2
from every x to every body
part q
i
is
o
i
= x −b
i
(10)
The training set is then the set of all training vec-
tors and corresponding offsets. With the training
dataset constructed, we train 2B RRFs R
1
i
i ∈ 1..B, to
estimate the offset to the row of body part b
i
and 2B
RRFs R
2
i
i ∈ 1..B, to estimate the offset to the column
of body part b
i
.
3.5 Test
Since the output of a RRF is a single valued contin-
uous variable, we let f (R
1,2
i
, I, x) be a function that
evaluates the RRF R
1,2
i
on image I at pixel x.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
560
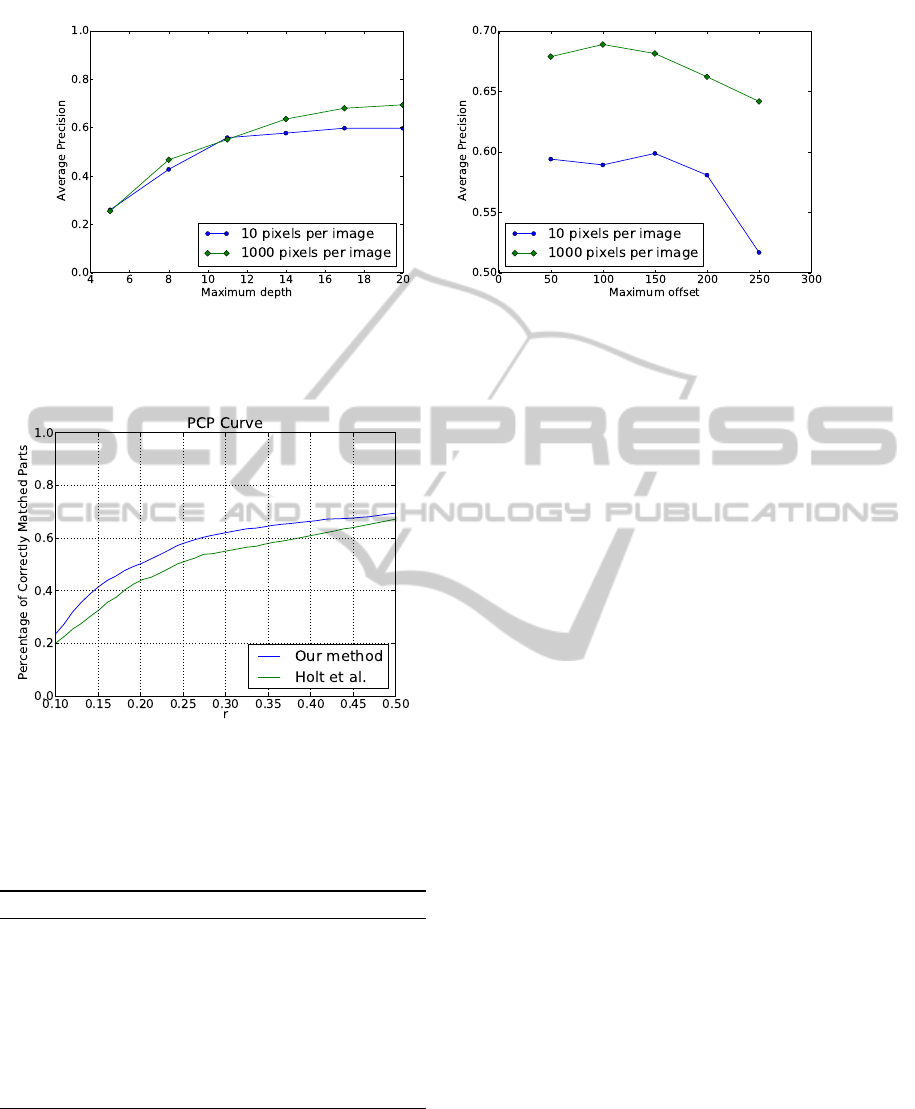
Figure 5: Parameter tuning: experiments on accuracy when (a) the depth of the trees are varied, (b) the maximum offset is
varied.
Figure 6: PCP error curve against (Holt et al., 2011). Our
method clearly beats theirs for all values of r, even though
we do not impose kinematic constraints.
We apply the following algorithm to populate the
Hough parameter space H
q
∀q ∈ Q.
Algorithm 1: Compute probability distribution H
q
.
Input: Image I,
for each pixel x do
for each label q
i
∈ Q do
o
1
i
⇐ R
1
i
(x)
o
2
i
⇐ R
2
i
(x)
increment H
q
i
(x +o
1
i
, x +o
2
i
)
end for
end for
The key idea is that for each pixel in a test image,
each RRF will be evaluated to estimate the the loca-
tion of the body part by adding the prediction (which
is the offset) to the current pixel.
4 EXPERIMENTAL RESULTS
In this section we evaluate our proposed method and
describe the experimental setup and experiments per-
formed. We compare our results to the state-of-the-
art (Holt et al., 2011) on a publicly available dataset,
and evaluate our results both quantitively and qualita-
tively.
For each body part q
i
∈ Q, a Hough accumula-
tor likelihood distribution is computed using Algo-
rithm 1. Unless otherwise specified, we construct our
training set from 1000 random pixels x per training
image I, where each sample has F = 2000 features
f
φ
(I, x). This results in a training set of 5.2GB.
4.1 Dataset
A number of datasets exist for the evaluation of pose
estimation techniques on appearance images, for ex-
ample Buffy (Ferrari et al., 2008) and Image Parse
(Ramanan, 2006), but until recently there were no
publicly available datasets for depth image pose esti-
mation. CDC4CV Poselets (Holt et al., 2011) appears
to be the first publicly available Kinect dataset, con-
sisting of 345 training and 347 test images at 640x480
pixels, where the focus is on capturing the upper body
of the subject. The dataset comes with annotations of
all the upper body part locations.
4.2 Evaluation
We report our results using the evaluation metric pro-
posed by (Ferrari et al., 2008): “A body part is con-
sidered as correctly matched if its segment endpoints
lie within r = 50% of the length of the ground-truth
segment from their annotated location.” The percent-
age of times that the endpoints match is then defined
STATIC POSE ESTIMATION FROM DEPTH IMAGES USING RANDOM REGRESSION FORESTS AND HOUGH
VOTING
561
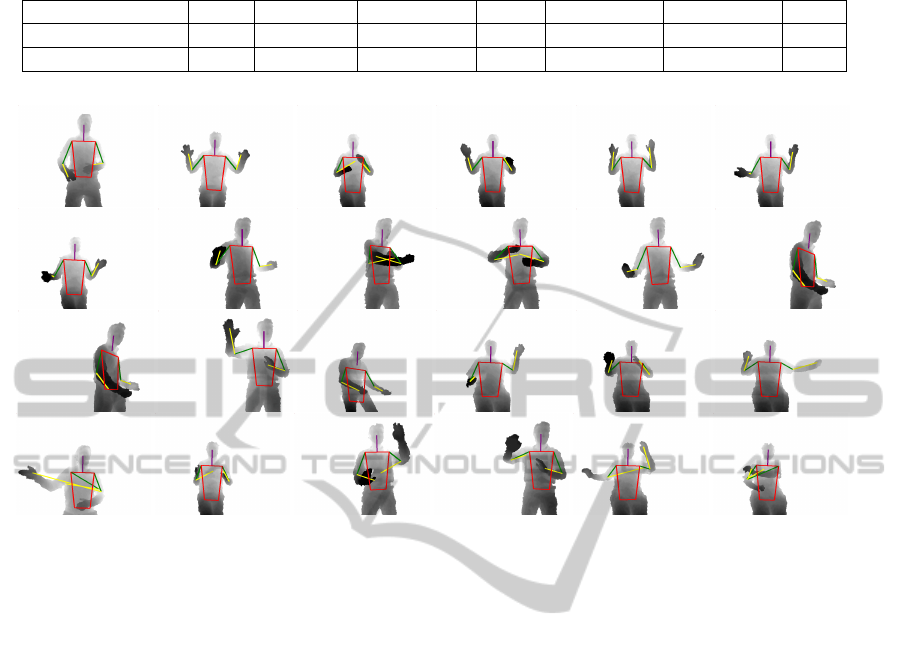
Table 1: Percentage of Correctly Matched Parts. Where two numbers are present in a cell, they refer to left/right respectively.
Head Shoulders Side Waist Upper arm Forearm Total
(Holt et al., 2011) 0.99 0.78 0.93 0.73 0.65 0.69 0.66 0.22 0.33 0.67
Our method 0.97 0.81 0.82 0.83 0.71 0.74 0.72 0.28 0.37 0.69
Figure 7: Top three rows: example predictions using the proposed method. Bottom row: Failure modes.
as the PCP. A low value for r requires to a very high
level of accuracy in the estimation of both endpoints
for the match to be correct, and this requirement is re-
laxed progressively as the ratio r increases to its high-
est value of r = 50%. In Figure 6 we show the effect
of varying r in the PCP calculation, and we report our
results at r = 50% in Table 1 as done by (Ferrari et al.,
2008) and (Holt et al., 2011). From Table 1 it can be
seen that our approach represents an improvement on
average of 5% for the forearm, upper arm and waist
over (Holt et al., 2011), even though our approach
makes no use of kinematic constraints to improve pre-
dictions.
In Figure 5(a) we show the effect of varying the
maximum depth of the trees. Note how the Random
Regression Forest trained on the training set with less
data (10 pixels per image) tends to overfit to the data
on deeper trees. Figure 5(b) shows the effect of vary-
ing the maximum window size w for the offsets φ.
Confirming our intuition, a small window has too lit-
tle context to make an accurate prediction, whereas
a very large window has too much context which re-
duces performance. The optimal window size is 100
pixels.
Example predictions including accurate estimates
and failure modes are shown in Figure 7.
4.3 Computation Times
Our implementation in python runs at ∼ 15 seconds
per frame on a single core modern desktop CPU. The
memory consumption is directly proportional to the
number of trees per forest and the maximum depth to
which each tree has been trained. At 10 trees per for-
est and a maximum depth of 20 nodes, the classifier
bank uses approximately 4 gigabytes of memory. The
code is not optimised, meaning that further speedups
could be achieved by parallelising the prediction pro-
cess since the estimates of each pixel are indepen-
dent of each other, by reimplementing the algorithm
in C/C++, or by making use of an off the shelf graph-
ics card that supports CUDA to run the algorithm in
parallel in the GPU cores.
5 CONCLUSIONS AND FUTURE
WORK
In this paper we have shown how Random Regres-
sion Forests can be combined with a Hough voting
framework to achieve robust body part localisation
with minimal training data. We use data captured
with consumer depth cameras and efficiently compute
depth comparison features that support our goal of
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
562

non-linear regression. We show how Random Regres-
sion Forests are trained, and then subsequently used
on test image with Hough voting to accurately pre-
dict joint locations. We demonstrate our approach and
compare to the state-of-the-art on a publicly available
dataset. Even though our system is implemented in an
unoptimised high level language, it runs in seconds
per frame on a single core. As future work we plan
to apply these results with the temporal constraints of
a tracking framework for increased accuracy and tem-
poral coherency. Finally, we would like to apply these
results to other areas of cognitive vision such as HCI
and gesture recognition.
ACKNOWLEDGEMENTS
This work was supported by the EC project
FP7-ICT-23113 Dicta-Sign and the EPSRC project
EP/I011811/1. Thanks to Eng-Jon Ong and Helen
Cooper for their insights and stimulating discussions.
REFERENCES
Agarwal, A. and Triggs, B. (2006). Recovering 3D human
pose from monocular images. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 28(1):44 –
58.
Amit, Y. and Geman, D. (1997). Shape quantization and
recognition with randomized trees. Neural computa-
tion, 9(7):1545–1588.
Andriluka, M., Roth, S., and Schiele, B. (2009). Pictorial
structures revisited: People detection and articulated
pose estimation. In (IEEE Computer Society Con-
ference on Computer Vision and Pattern Recognition,
2009), pages 1014 –1021.
Bo, L. and Sminchisescu, C. (2010). Twin gaussian pro-
cesses for structured prediction. International Journal
of Computer Vision, 87:28–52.
Bourdev, L., Maji, S., Brox, T., and Malik, J. (2010). De-
tecting people using mutually consistent poselet acti-
vations. In (ECCV, 2010), pages 168 – 181.
Breiman, L. (2001). Random forests. Machine Learning,
45:5–32.
Breiman, L., Friedman, J., Olshen, R., and Stone, C. (1984).
Classification and regression trees. Chapman and
Hall.
Criminisi, A., Shotton, J., Robertson, D., and Konukoglu,
E. (2011). Regression forests for efficient anatomy
detection and localization in CT studies. In Medical
Computer Vision. Recognition Techniques and Appli-
cations in Medical Imaging, volume 6533 of Lecture
Notes in Computer Science, pages 106–117. Springer.
CVPR (2008). CVPR, Anchorage, AK, USA.
CVPR (2010). CVPR, San Francisco, USA.
CVPR (2011). CVPR, Colorado Springs, USA.
ECCV (2010). ECCV, Heraklion, Crete.
Eichner, M., Ferrari, V., and Zurich, S. (2009). Better ap-
pearance models for pictorial structures. In Proceed-
ings of the BMVA British Machine Vision Conference,
volume 2, page 6, London, UK.
Fanelli, G., Gall, J., and Van Gool, L. (2011). Real time
head pose estimation with random regression forests.
In (CVPR, 2011), pages 617 –624.
Felzenszwalb, P. and Huttenlocher, D. (2005). Pictorial
structures for object recognition. International Jour-
nal of Computer Vision, 61(1):55 – 79.
Ferrari, V., Marin-Jimenez, M., and Zisserman, A. (2008).
Progressive search space reduction for human pose es-
timation. In (CVPR, 2008), pages 1 – 8.
Gall, J. and Lempitsky, V. (2009). Class-specific hough
forests for object detection. In (IEEE Computer So-
ciety Conference on Computer Vision and Pattern
Recognition, 2009), pages 1022–1029.
Ganapathi, V., Plagemann, C., Koller, D., and Thrun, S.
(2010). Real time motion capture using a single time-
of-flight camera. In (CVPR, 2010), pages 755 –762.
Holt, B., Ong, E. J., Cooper, H., and Bowden, R. (2011).
Putting the pieces together: Connected poselets for
human pose estimation. In Proceedings of the IEEE
Workshop on Consumer Depth Cameras for Computer
Vision, Barcelona, Spain.
IEEE Computer Society Conference on Computer Vision
and Pattern Recognition (2009). CVPR, Miami, FL,
USA.
Lepetit, V. and Fua, P. (2006). Keypoint recognition us-
ing randomized trees. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 28(9):1465–1479.
Moeslund, T., Hilton, A., and Kr
¨
uger, V. (2006). A sur-
vey of advances in vision-based human motion cap-
ture and analysis. Computer Vision and Image Under-
standing, 104(2-3):90 – 126.
Montillo, A. and Ling, H. (2009). Age regression from
faces using random forests. In ICIP09, pages 2465–
2468.
Ramanan, D. (2006). Learning to parse images of articu-
lated bodies. In Proceedings of the NIPS, volume 19,
page 1129, Vancouver, B.C., Canada. Citeseer.
Reynolds, M., Dobo
ˇ
s, J., Peel, L., Weyrich, T., and Brostow,
G. (2011). Capturing time-of-flight data with confi-
dence. In (CVPR, 2011).
Rogez, G., Rihan, J., Ramalingam, S., Orrite, C., and Torr,
P. H. S. (2008). Randomized trees for human pose
detection. In (CVPR, 2008), pages 1–8.
Sapp, B., Jordan, C., and Taskar, B. (2010). Adaptive pose
priors for pictorial structures. In (CVPR, 2010), pages
422 –429.
Shakhnarovich, G., Viola, P., and Darrell, T. (2003). Fast
pose estimation with parameter-sensitive hashing. In
Proceedings of the IEEE International Conference on
Computer Vision, page 750, Nice, France.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from a sin-
gle depth image. In (CVPR, 2011).
STATIC POSE ESTIMATION FROM DEPTH IMAGES USING RANDOM REGRESSION FORESTS AND HOUGH
VOTING
563

Sigal, L. and Black, M. (2006). Measure locally, reason
globally: Occlusion-sensitive articulated pose estima-
tion. In Proceedings of the IEEE Computer Society
Conference on Computer Vision and Pattern Recogni-
tion, pages 2041 – 2048, New York, NY, USA.
Singh, V. K., Nevatia, R., and Huang, C. (2010). Efficient
inference with multiple heterogeneous part detectors
for human pose estimation. In (ECCV, 2010), pages
314 – 327.
Tian, T.-P. and Sclaroff, S. (2010). Fast globally optimal 2d
human detection with loopy graph models. In (CVPR,
2010), pages 81 –88.
Tran, D. and Forsyth, D. (2010). Improved human parsing
with a full relational model. In (ECCV, 2010), pages
227–240.
Wang, Y. and Mori, G. (2008). Multiple tree models for
occlusion and spatial constraints in human pose esti-
mation. In Proceedings of the European Conference
on Computer Vision, Marseille, France.
Wang, Y., Tran, D., and Liao, Z. (2011). Learning hierar-
chical poselets for human parsing. In (CVPR, 2011).
Zhu, Y. and Fujimura, K. (2010). A bayesian framework
for human body pose tracking from depth image se-
quences. Sensors, 10(5):5280 – 5293.
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
564
