
EFFICIENTLY FINDING (NEARLY) MINIMAL FST
OF REPETITIVE UNSEGMENTED DEMONSTRATION DATA
Frederick L. Crabbe
Computer Science Department, US Naval Academy, 572M Holloway Rd Stop 9F, Annapolis, Maryland 21402, U.S.A.
Keywords:
Robots, Plan Learning, Learning from Demonstration, Minimal Programs.
Abstract:
This paper presents an algorithm that enables a robot to learn from demonstration by inferring a nearly minimal
plan instead of the more common policy. The algorithm uses only the demon- strated actions to build the plan,
without relying on observation of the world states during the demonstration. By making assumptions about
the format of the data, it can generate this plan in O(n
5
).
1 INTRODUCTION
Learning from Demonstration (LfD) is an estab-
lished
eld in which robot controllers are devel- oped
from example data. In most cases, this takes the form
of learning a policy (Bertsekas, 2005) that maps world
states directly to outputs (Argall et al., 2009) . There
are however other possible models for LfD, such as
inferring planning operators or even direct plans or
programs. This paper examines the problem from a
non-policy perspective, inferring a plan represented
as a Finite State Transducer (FST) from example data
that is repetitive (a set of actions is repeated, with
small variations each repetition).
By making the assumption of repetitive input data,
we enable the inference of a nearly mini- mal size pro-
gram from the data (minimality tends to have good
generalization properties (Blumer et al., 1987)). In
the general case, inferring a min- imal program is very
expensive, and inferring a minimal Finite State Au-
tomaton is NP-complete (Gold, 1978; Pitt and War-
muth, 1993). We claim that the repetitive nature of
many robot tasks makes this input-as-repeating-data
a reasonable assumption. This assumption, plus an
assumption that the world state only needs to be sam-
pled at certain times in the repetitions, lead to fast al-
gorithms, inferring an FST in O(n
5
).
An example real-world repetitive task might be
the process of loading a container ship. In it the loader
must repeatedly: a) move container in position; if load
has shifted, b) repack; c) lift con- tainer; d) move to
location on ship; e) secure con- tainer; if there is void
space, f) fill with dunnage; g) lock doors (McNamara,
2010). A robot at- tempting to infer this algorithm
might see a long sequence of world states paired with
actions. For example, if we number world states ar-
bitrarily, and label actions as above, the observed se-
quence might be: (0/a, 8/c, 8/d, 9/e, 8/g, 1/a, 5/b, 7/c,
9/d, 9/e, 6/g, 2/a, 9/c, 8/d, 2/e, 9/f, 2/g, 3/a, 5/b, 0/c,
8/d, 9/e, 8/f, 2/g, 0/a, 5/c, 0/d, 9/e, 8/g). Our approach
strips out the actions: (acde- gabcdegacdefgabcdef-
gacdeg) and uses this to de- termine the basic loop,
adding the world state in- formation back in at the
end, as shown in Figure 1. As discussed below, the
agent using this pro- gram samples the world state at
the start of each pass through the loop, and uses that
information to determine all actions through that pass.
2 APPROACH
Because the general problem of inferring a min- imal
finite state machine from a data set is difficult, we
make some restrictive assumptions on the structure
of the possible programs. We assume all programs
consist of a repeated sequence of actions (no nested
loops) where within individual passes of the loop,
there might be small deviations from the typical pass.
We will infer the machine from the observed behav-
ior only, and apply the sensor observations of the
demonstrator at the end of the process. Thus, the
formal problem is, given a demonstration sequence
consisting of world-state/action pairs, infer a mini-
mal FST such that the action sequence would be gen-
erated by repeated applications of that FST. Follow-
ing Veloso and Veeraraghavan (Veeraraghavan and
Veloso, 2008), we assume that at the start of each loop
the world-state contains sufficient information to de-
termine the path through the FST. The robot makes
the decision about the relevant properties of the envi-
673
L. Crabbe F..
EFFICIENTLY FINDING (NEARLY) MINIMAL FST OF REPETITIVE UNSEGMENTED DEMONSTRATION DATA.
DOI: 10.5220/0003881906730678
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (SSIR-2012), pages 673-678
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

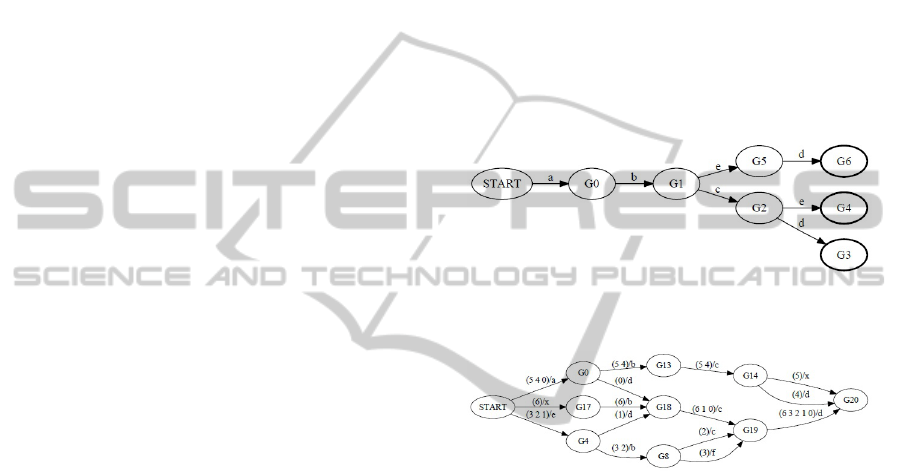
Figure 1: Contents of the loop in the program inferred in the loading example, represented as a Mealy Machine. Each
transition is labeled with a set of world states in parentheses, a slash, and then actions to take given those world states. During
execution, the world state is observed at the start, and that value is used to select transitions throughout that pass in the loop.
Thus, if in world state 1 at the start, the robot would move from Start to G0, G6, G7, G8, G9, and finally G13, outputting
(acdefg) for that pass through the loop. World states 5-9 are not used in the machine because they are never true at the
beginning of a loop pass.
ronment at the start of the pass through the loop, fol-
lowing branches determined at that start (in an ex-
treme case, imagine the robot consulting an informa-
tion board at the start of a pass, and using that infor-
mation to determine what actions to take through that
pass). The ramifications of this will be discussed in
section 5. For example, figure 2 shows the contents
of the loop where the robot executes action a then b,
and then if condition 0 is true, execute action c, or if
condition 1 is true, execute action d.
Current state-of-the-art FSA inference algorithms
use a set of short strings as input (Bugalho and
Oliveira, 2005). The demonstration data for our prob-
lem is, in contrast, single long sequence of actions.
Our approach is to first efficiently partition the ac-
tion sequence using a technique for finding approx-
imate repetitions in strings, and then use the set of
substrings to generate the transducer. Of course, even
given partitioned actions, the problem of generat-
ing the minimal transducer is, as noted above, NP-
complete. However, the assumption that the input is
known at the beginning of each pass through the loop
provides us with an efficient algorithm to find the min-
imal FST.
2.1 Notation
As in the above example, we will represent an action
in a sequence as a single character and a complete
action sequence as a string. When a string has been
partitioned into substrings, where each substring rep-
resents a pass through the loop, each substring will be
labeled with a number, corresponding to the matching
world conditions that must later be determined from
the world state that matches the start of each subse-
quence.
3 ALGORITHM
The algorithm consists of computing one or more par-
titions of the action string, using the set of strings in
the partition to generate a FST, and finally apply the
world-state conditions from the original data to create
the FST.
3.1 Generating Partitions
The partitioning problem can be stated as, given a
string x of length n, generate a set of m substrings,
x[1...i
1
], x[i
1+1
...i
2
], ..., x[i
m
..n] that will be used to
generate a minimal FSA. To do this, we rely on the
assumption that most of the iterations through the sin-
gle loop are similar if not identical, with some steps
inserted or deleted. Under this assumption, the prob-
lem resembles finding an approximate repetition (Sim
et al., 2001). In an approximate repetition problem, a
string p is a period of x, if x = p
1
p
2
...p
m
, where each
p
i
is an edited version of p. Given an edit distance
function δ(., .), the problem becomes finding the best
p(p
∗
), s.t. given all possible partitions p
i
,
p
∗
= argmin
p
max
i
δ(p, p
i
)
Figure 2: FST inferred from the action sequence ”abcabd”.
Figure 3: A minimal FST for the actions sequence ”ab-
cabd”, when partitioned with the period ”ab”.
That is, assuming that x is made up of approximate
repetitions of some string, the period p
∗
is the string
for which there exists a partition of x where the dis-
tance between p
∗
and the substring it is furthest from
is less than any other combination of p
i
’s and parti-
tions. As we shall see, the process of finding p
∗
will
also partition the string into its component p
i
.
The approximate repetition problem described
above is different from the sort of partitioning re-
quired for our problem in three ways. First, since
we a measuring the size of the overall program, in-
stead of the maximum distance from p
∗
we are look-
ing for the sum of all the distances between p
∗
and
each p
i
. Fortunately, this is easily fixed, as described
below. Second, the sum of the edit distances does
ICAART 2012 - International Conference on Agents and Artificial Intelligence
674
not match perfectly with the size the resulting FSA.
For example, if x = ”abcabd”, the p
∗
was ”abc” and
the total estimated program size is 4: 3 to generate
the period ”abc”, plus 1 substitution for ”abd” (figure
2). However, selecting the period as ”ab” also yields
an estimated program size of 4 (2 to generate the pe-
riod, plus two edits to generate ”cabd”, yet this par-
tition results in a larger FST than the former (figure
3). Thus the partition can under-estimate the size of
the resulting program. In practice, the when the par-
tition algorithm returns a bad partition, it also returns
a good one with the same cost. The third difference
between the approximate repetition problem and our
partition problem is that the former looks at the pair-
wise cost between p
∗
and each p
i
, whereas in the FST
multiple p
i
’s can also interact. For example, given
x = ”abcabcabcabdabd” and p = ”abc”, the parti-
tion algorithm partitions to p
0
:”abc”, p
1
:”abc”, p
2
:”abc”, p
3
:”abd”, p
4
:”abd” and estimates a cost of
5 (3 for p
0
, 0 for p
1
and p
2
, one each for the replac-
ing of ”c” with ”d”). Of course, since the ”d” is the
same for p
3
and p
4
, the real cost should be 4. Thus
the partition can also over-estimate. The implications
of these two inaccuracies is discussed more is section
5.
If we allow p to be any string, the partitioning
problem is known to be NP-complete (Sim et al.,
2001), but if we assume that p occurs in x, then it
can be found in polynomial time. We can modify the
algorithm from Sim et al. (Sim et al., 2001) to find p
∗
for our problem, shown in algorithm 1.
Algorithm 1
p
max
=
/
0
t
max
= 0
For each p ∈ Substrings(x)
1. For each i|0 ≤ i ≥ n
(a) Compute the edit distance table δ from p to
x[i..n]
2. t
0
= 0
3. For each i|0 < i ≤ n
(a) t
i
= min
0≤h<i
(t
h
+ δ(p, x[h + 1..i]))
4. if t
n
+ |p| > t
max
, t
max
= t
n
, p
max
= p
return p
max
In the main loop (step 3) each t
i
is the total edit
distance using p as the period, up through position i.
In step 3a, we consider the cost of partitioning from h
to i, which would be the distance from p to x[h+ 1..i],
plus the cost of all of the other partitions, t
h
.
The algorithm above not only finds the best p for
the string x, if we remember h for each term selected
by the min in step 3a, the resulting list of h’s gives
us the points to split the string x, thus generating our
partitions for the next stage.
3.2 Building the FST
Once we have broken the action sequence into a set of
subsequences, we can begin to find the minimal FST
that generates those strings. One standard approach
to this problem is to first build a tree known as the
Augmented Prefix Tree Acceptor (APTA) (Bugalho
and Oliveira, 2005), an FSA in tree form that gen-
erates each of the action substrings (figure 4). Once
the APTA is built, there are several algorithms that
attempt to minimize it by merging pairs of merge-
able states (Lang et al., 1998). These algorithms
search the space of possible merges to find the mini-
mal FSA. Unfortunately, this approach also has expo-
nential time complexity.
Figure 4: The APTA generated from the set of strings,
{”abcd”, ”abce”, ”abed”}.
Figure 5: Final FST from the action sequence ”adcdedcde-
bcdebfdabcdabcxxbcd”.
If we include the assumption that the world- state
information given to the robot at the beginning of
each pass through the loop, then we can consider the
world-state information to be the same for each or the
steps in the subsequence. For example, if a world-
state/action sequence was (1/a, 4/b, 2/c, 2/a, 3/b, 1/c)
the action sequence would be (abcabd), which is par-
titioned into (abc) and (abd). We then relabel the ac-
tions with the world state at the start of each subse-
quence: (1/a, 1/b, 1/c) and (2/a, 2/b, 2/d). If we treat
our APTA as a FSA, temporarily ignoring the world
state, and label the transitions with just the actions,
the result is a Deterministic Finite-state Automaton
(DFA). This DFA can be minimized with known algo-
rithms in O(nlogn) time (Hopcroft, 1971). Once we
have a minimal DFA, we can add the world-state la-
bels to the transitions without harming the determinis-
tic property of the automaton because of our assump-
tion about the structure of the world state information.
We can easily show that this results in an unambigu-
ous FST:
EFFICIENTLY FINDING (NEARLY) MINIMAL FST OF REPETITIVE UNSEGMENTED DEMONSTRATION DATA
675

Lemma 1. Minimizing the APTA as a DFA, and then
applying the world states from the starts of each sub-
sequence to the entire subsequence yields a minimal
unambiguous FST.
Proof.
1. The original APTA contains no cycles, by defi-
nition of tree, therefore the minimized DFA con-
tains no directed cycles, or it would accept arbi-
trarily long strings not accepted by the APTA.
2. When converting the DFA to an FST, the addi-
tion of constraints in the form of the world states
(the numbers) on the transitions cannot enable a
smaller machine. The FST could be made smaller
than the DFA only if adding the world states en-
abled more merges on the minimal DFA. Since
mergeability of two states is still determined in
part by the output character, the additional con-
straints will not enable more states to merge in ei-
ther the minimal or any other DFA. Therefore the
FST is also minimal.
3. Non-determinism in the FST could only come
from more than one transition from a node with
the same world-state on each transition. Since
each partition substring is uniquely labeled, am-
biguity cannot arise from labels from multiple
substrings. Because there are no directed cycles,
when labeling the transitions for a particular sub-
string, each node can be visited at most once.
Therefore the FST is unambiguous.
Algorithm 2
1. Compute APTA from data, ignoring worldstate.
2. Minimize APTA as a deterministic finite state au-
tomaton.
3. For each data string d
(a) s =start state
(b) For each character c ∈ d
i. t = transition from s that matches c
ii. Label t with the world-state from d
iii. s = NextState(t)
3.3 Example
An example run through the algorithm follows. Given
an initial action sequence of ”adcdedcdebcdebfdabcd-
abcxxbcd”, the partitioning portion generates two po-
tential partitions, each with an estimated program
size of 12. The first uses ”abcd” as p, partitioning
the string as, {”adcd” ”edcd” ”ebcd” ”ebfd” ”abcd”
”abcx” ”xbcd”}. The second partition uses ”ebcd”
as p, but ends up with the same partition. The FST
builder takes that partition and generates the FST
shown in figure 5.
3.4 Run Time Analysis
In algorithm 1, the main loop is executed O(n
2
) times.
Building each distance table takes (letting q = |p|, and
i is from line 1 (a) in algorithm 1) O(qi), so that all
the tables take O(n
2
q), roughly O(n
3
). In step 3a,
there are n comparisons in each call to min, and t
i
is computed n times, for a total of O(n
2
), therefore
algorithm 1 is O(n
5
). In algorithm 2 step 1 is O(n),
step 2 can be done in O(nlogn) (Hopcroft, 1971), and
the loop in step 3 is just O(n), making algorithm 2
O(nlogn) and the overall process O(n
5
).
Once caveat to this analysis is that it assumes the
action data genuinely comes from a loop and there is
a sensible period. If there is no good period, such as
when all the characters are unique, all partitions are
equally bad. In this case, although p can be found
quickly, all possible periods are equivalent, and all
possible partitions of the sequence for each candidate
p are equivalent, thus there are n
2
2
n−1
total equivalent
results. As a practical matter, we cut off the number
of partitions to 20 per period, but with input strings
that do have a component period, we do not hit the
threshold in practice.
4 EXAMPLE TRIAL
To test the algorithm, we ran it on a small data set
gathered by observing the behavior of a single indi-
vidual retrieving coffee from the department coffee
maker over the period of five days. This data set dif-
fers slightly from the type of data de- scribe above
in that while it is repetitive, the time differences be-
tween each pass could be used to partition the passes
correctly. However, if we ignore those breaks and run
the data together into a single stream, then it does fit
into the paradigm of the algorithm. The behavior se-
quence we observed correspond to two normal coffee
retrieval events, and event where the pot was empty
and needed to be remade, one normal coffee event,
and a coffee retrieval at the end of the day, so the ma-
chine was shut off, for a total of 64 steps. Details
of the data and the results can be found in (Crabbe,
2011).
In the first stage of the process, algorithm 1 cor-
rection identifies the normal coffee retrieval as the pe-
riod. Because one of the variations from the period is
long compared to the period itself, the algorithm 1
finds that the cost of considering the variation to be
a single partition is equal to splitting the sequence in
the middle and considering the first part as a suffix to
one partition and the second as it’s own. Algorithm 1
generates nine partitions, all of which differ in where
ICAART 2012 - International Conference on Agents and Artificial Intelligence
676

they split the ”make new pot” event. Of those nine, all
are converted by algorithm 2 into equal size FSTs, as
measured by number of actions. A Lisp implementa-
tion of the algorithm, running on a single 3GHz Intel
Core i7, generates the nine programs in 10.4 seconds.
5 DISCUSSION AND FUTURE
WORK
Although the algorithm is theoretically sound, there
are several areas of potential improvements and ele-
ments that need to be addressed to incorporate it in to
practical robotic system.
5.1 Splitting Long Sequences
As seen in the coffee data, when a particular pass
through the loop introduces a long chain of actions
dissimilar to other passes, the partitioning algorithm
generates multiple partitions of that pass, all having
equal cost. This is especially common when there is
an addendum at the end of a pass. The algorithm has
no way to determine whether those actions are a suf-
fix to the pass, a prefix to the next pass, or both (some
actions are a suffix and some a prefix).
We believe that differentiation between the mul-
tiple resulting programs can best be done after their
generation. Some FSTs may more naturally match the
world state changes (see below). Another mechanism
to differentiate would by to actually try the FSTs and
measure their success. In the future we will examine
both of these techniques.
5.2 Generalizing World State
As described above, the approach taken here is to
attempt to infer a minimal program from only ob-
served actions of another agent. We reapply the in-
puts in algorithm 2 to build the final FST. In that al-
gorithm we make no assumption about how each set
of inputs is related (e.g. the input for pass 0 may
or may not intersect with that of pass 1). This ap-
proach misses some potential generalization in the re-
sulting programs. For instance, if pass 0 and pass
1 have identical actions, it would make sense to at-
tempt to generalize the world states at the start of both
passes. Future work will include applying logical
machine learn- ing techniques such as Version Space
style learn- ing (Mitchell, 1982) on the input sets to
generalize good descriptions of the states. This may
have ramifications on the partitioning that takes place
in our algorithm. As discussed above, if there are sev-
eral equally good partitions, some may be eliminated
based on the quality of the input generalization.
5.3 Data Assumptions
There are three primary assumptions made about the
data required for the algorithm to work: the data is
repetitive, that the input to the robot at the begin-
ning of the loop is sufficient to determine the behav-
ior through that pass, and that the correct period p
occurs in the input string x. We maintain that these
assumptions are reasonable for many kinds of robot
tasks. Typical robot applications are for repetitive
tasks, from manufacturing to maintenance to patrol.
Many other tasks such as food preparation and ser-
vice also consist of these sorts repetitive tasks, com-
plete with input arriving at the start of the loop (e.g.
the customer’s order). Finally, with a large enough
data set, the probability of the ”common” sequence
of actions for a task is high. Although there may exist
a partition that results in fewer overall edits, we pre-
fer that the period be selected from the data, as we
believe that the best period would be one that was ac-
tually displayed.
For future work, we will investigate ways to
loosen the assumptions on the data, allowing for
nested loops or input to be checked at other fixed mo-
ments in execution. We will also attempt to character-
ize bounds on the size of the output compared to the
true minimal machine.
6 CONCLUSIONS
This paper has presented an algorithm for inferring a
program from repetitive data. It uses a two step ap-
proach, first partitioning the data by minimizing the
edit distance between the proposed partitions, treat-
ing each partition as a separate pass through a loop,
converting the passes to a FSM and then minimizing
that machine. It has shown that under the assumptions
that the data was generated from a program contain-
ing a single non-nested loop and that branches taken
within the loop are determined by input at the start
of the loop, we can find a nearly minimal program
in O(n
5
), instead of exponential time for the general
case.
ACKNOWLEDGEMENTS
The author would like to thank Chris Brown and Re-
becca Hwa for many helpful insights. This work was
EFFICIENTLY FINDING (NEARLY) MINIMAL FST OF REPETITIVE UNSEGMENTED DEMONSTRATION DATA
677

supported with a grant from the Office of Naval Re-
search.
REFERENCES
Argall, B., Chernova, S., Veloso, M., and Brown-ing, B.
(2009). A survey of robot learn- ing from demonstra-
tion. Robotics and Au- tonomous Systems, 57(5):469–
483.
Bertsekas, D. P. (2005). Dynamic Programming and Opti-
mal Control, volume 1. Athena Scientific, Belmont,
MA.
Blumer, A., Ehrenfeucht, A., Haussler, D., and Warmuth,
M. (1987). Occam’s razor. Information Processing
Letters, 24(6):377–380.
Bugalho, M. and Oliveira, A. (2005). Inference of regu-
lar languages using state merging algorithms. Pattern
Recognition, 38:1457–1467.
Crabbe, F. (2011). Experiments on a technique for find-
ing small fsts of repetitive unsegmented demonstra-
tion data. Usna-cs-2011-02, US Naval Academy.
Gold, E. M. (1978). Complexity of automoton identification
from given data. Iform. Control, 37:302–320.
Hopcroft, J. (1971). Theory of machines and computations,
chapter An n log n algorithm for minimizing states in
a finite automaton, pages 189–196. Academic Press.
Lang, K. J., Pearlmutter, B. A., and Price, R. A. (1998).
Results of the abbadingo one dfa learning competition
and a new evidence-driven state merging algorithm. In
ICGI, pages 1–12.
McNamara, J. J. (2010). 10 steps to load, stow and secure a
freight container. The Journal of Commerce.
Mitchell, T. M. (1982). Generalization as search. Artificial
Intelligence Journal, 18(2):203–226.
Pitt, L. and Warmuth, M. (1993). The minimum consistent
dfa problem cannot be approximated within any poly-
nomial. J. Assoc. Comput. Mach., 40(1):95–142.
Sim, J. S., Iliopoulos, C. S., Park, K., and Smyth, W. (2001).
Approximate periods of strings. Theoretical Com-
puter Science, 262(557-568).
Veeraraghavan, H. and Veloso, M. M. (2008). Teaching
sequential tasks with repetition through demonstra-
tion. In Proceedings of the 7th international joint
conference on Autonomous agents and multiagent sys-
tems(AAMAS), volume 3, pages 1357–1360.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
678
