
ADDRESSING THE LONG-TERM EVALUATION OF A
TELEPRESENCE ROBOT FOR THE ELDERLY
Amedeo Cesta
1
, Gabriella Cortellessa
1
, Andrea Orlandini
1,2
and Lorenza Tiberio
1
1
CNR – Consiglio Nazionale delle Ricerche, ISTC, Rome, Italy
2
CNR – Consiglio Nazionale delle Ricerche, ITIA, Milan, Italy
Keywords:
Human-Robot interaction, Social robotics, Telepresence robot, Long-term evaluation.
Abstract:
This paper presents aspects of an ongoing work for a long-term evaluation of a telepresence robot named
GIRAFF, as a tool for facilitating interaction and support delivery to older people living at home. Most robotic
systems are usually used for short periods of time and in laboratory settings, while this paper describes the
challenges, both technological and related to the user evaluation that human-robot interaction should addressed
in view of a real use of the technology for a long time span outside the laboratory. The work describes
our experience in developing testing sites and in designing an evaluation plan to assess the potential of the
GIRAFF platform for telepresence. We highlight open points related to the transition from a limited use in time
(short term) to a significant period of time (long term). From a human-robot interaction perspective, we first
introduce some results from the short term evaluation, obtained by interviewing 26 nurses as possible clients
(people connecting to the robot) and 10 older adults as possible end users (people receiving visits through the
robot). The paper describes then a complete evaluation plan designed for the long term assessment. From a
technological point of view a set of mandatory “intelligent features” are taken into account that could enable
a better real world deployment by inheriting capabilities form state-of-the-art autonomous intelligent robots.
1 INTRODUCTION
The area of social robotics is receiving increasing at-
tention and the task of “robot as companions” is be-
coming a relevant reference problem also driven by
funding agencies (see for example the EU within FP7
- Cognitive Systems). This attention has focalized
not only research groups but also small and medium
size companies that created new platforms (e.g., the
NAO by Albebaran Robotics, the PR2 by Willow-
Garage), the appearance of new areas with confer-
ences and journals (e.g., the label Human-Robot In-
teraction spelled out in different ways), and several
projects to build different type of solution of robots
that both interact with humans and are connected to
heterogeneous technology to build innovative solu-
tions (e.g., (Pineau et al., 2003; Cesta et al., 2011;
Saffiotti, 2009)).
In this paper we want to emphasize one aspect that
deserves special attention: the study of reaction of
people who share the environments in which the robot
operates over a long periods of time.
The reason to underscore this aspect is because, in
robotics, there is a deep-rooted tradition in develop-
ing technology usually shown in sporadic events and
for short periods, i.e., for demos or live show cases,
which are intended to demonstrate the “enhanced”
characteristics of a prototype, making them attractive
while “hiding” or at least “containing” the technical
problems connected with any long term use within a
comprehensive application. It is worth noting that in
the case of social companions (e.g., robot assisting
old people at home) one relevant issue for the robotic
technology is their continuous operation, their robust-
ness and the continuous interaction with humans over
time. Which are the implications of such a continu-
ity of use? And, in particular, how can we develop a
methodology for assessing human reactions with re-
spect to this technology? These two questions are be-
coming very relevant. The challenges for the Intel-
ligent Technology and the Human Robot Interaction
researchers are numerous and mainly related to two
aspects: (a) in terms of technology, the need exists
to create robust, efficient and secure solutions; (b) in
terms of users perspective, robots must adhere to user
requirements and be acceptable in the long term.
652
Cesta A., Cortellessa G., Orlandini A. and Tiberio L..
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY.
DOI: 10.5220/0003884306520663
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (SSIR-2012), pages 652-663
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

More specifically, the transition from a use in the
laboratory to an actual deployment into real contexts,
highlights the need for a transition from short term ex-
periments to a long term experience hence requiring
a shift of attention that is highlighted in this paper. In
particular we underscore how long-term use and eval-
uation are in our opinion key points to be addressed to
ensure that intelligent robotic technology can actually
make a leap forward and be used in real environments.
The motivation of this paper stems in our work in
the EXCITE project
1
. The project focuses around
an industrial mobile telepresence platform called GI-
RAFF and aims at fielding nine robots in three dif-
ferent European countries for an evaluation in real
context of use. The evaluation aims at taking social
and psychological factors into account and at ana-
lyzing also the emergence of “undesired behaviors”
like technological weaknesses in continuous opera-
tion, human rejection, etc. Starting from the project
experience, this paper analyzes and reasons about the
work to both realize experiments with real users out-
side the laboratories and to develop a methodology
for addressing long term evaluation with people. The
paper also reasons on some technological challenges
for telepresence robots when fielded in real environ-
ments.
The paper is organized as follows: Sections 2 and
3 enrich the context for this work by introducing re-
spectively a telepresence robot and an overview and
the EXCITE aims. Section 4 describes the design and
current result of the evaluation of the GIRAFF at work.
Based on these results, Section 5 discusses some tech-
nical challenges that need to be addressed for long
term use. Some conclusions end the paper.
2 WHY MOBILE ROBOT
TELEPRESENCE
Mobile robotic telepresence is a sub area in robotics
that is progressively producing available systems and
tools for real use (i.e., Anybots QB (Anybots, 2011),
VGo Communications VGo (VGo, 2011), Willow
Garages Texai (WillowGarage, 2011)). The different
platforms combine a robotic mobile base with a re-
mote video conference facility for the communication
between distributed worker-teams, relatives or health
professionals and elderly people at home or at health-
care facilities – see examples in (Lee and Takayama,
2011; Tsui et al., 2011b).
One of the most recurrently questions when a
telepresence robot is proposed to a potential user is
1
http://www.excite-project.eu
related to the difference with traditional video confer-
encing systems. Telepresence is a new and different
manner of telecommunication because it establishes a
real sense of shared space between geographically re-
mote people duplicating the three-dimensional expe-
rience through “real human face to face interaction”.
Schloerb (Schloerb, 1995) describes telepresence like
as the possibility for an individual to be “objectively
present in a real environment that is physically sepa-
rated from the person in space”. In addition, one of
the main feature of telepresence systems is the sense
of robots presence that emerges when humans inter-
act with and via a telepresence robotic system. Spa-
tial presence refers to the “the sense of being physi-
cally located somewhere” as well as social presence
refers to “being with others” in a mediated environ-
ment (Heeter, 1992; Ijsselsteijn et al., 2000).
One other aspect that is worth being mentioned
concerns the use of mobile telepresence for old peo-
ple support. One of the current limitation in propos-
ing an autonomous robotic platform as companions at
home (the basic idea proposed in (Pineau et al., 2003)
for example) is not only the current costs and brit-
tleness but also the lack of human empathy and the
de-personalization of the current social robots. In-
deed, some research initiatives are investigating the
human-like aspects of robotics (e.g., (Kanda et al.,
2005) and others) but this is seen as a medium to long
term achievement. On the contrary the use of robot
as a media for facilitating remote human presence in
a physical space can be seen as a current intermediate
solution able to maintain the “human touch” without
the need of “being there”.
In the telepresence research area, there have been
few examples of robotic technology as tool for home
care assistance for the elderly and for their interper-
sonal communication with caregivers, relatives and
healthcare professionals. InTouch Health Company,
in cooperation with Johns Hopkins University, has
developedthe “Physician-Robot” allowing physicians
to visit more regularly their hospitalized patients. Re-
sults from an evaluation of Johns Hopkins University
showed that 80% of the patients felt that Physician-
Robot increases the interaction between physicians
and patients (Thacker,2005). InTouch Health has also
developed the RP-7 platform for physician-patient
consults allowing to remotely monitor patients of-
fering ongoing support in terms of primary care
and rehabilitation through the robot (InTouch, 2011).
Some other examples are also worth being men-
tioned: (a) TeCaRob system provides continuous re-
mote physical assistance performing tasks such as to
transfer and move end-user, to carry out activities in
end-user environment, to interact closely with end-
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
653

user body and to communicate and monitor end-user
(Helal and Abdulrazak, 2006); (b) the Telepresence
Robot for Interpersonal Communication (TRIC) is a
telepresence robot for interpersonal communication
that allows older adults to remain in contact with fam-
ily members and caregiver from their home environ-
ments via traditional methods (Tsai et al., 2007). In-
deed, more recent products are offering a larger op-
portunity for addressing the problem of presence at
elderly home in a more systematic way.
3 THE EXCITE PROJECT
The EXCITE project is winner of one of the calls of
the EU Ambient Assisted Living Joint Programme
2
,
the aim of which is to enhance the quality of life of
older people and strengthen the industrial base in Eu-
rope through the use of Information and Communi-
cation Technologies (ICT). The specific topic of the
call within which the project has been selected was
focused on the idea of using innovative technology
for the “Advancement of Social Interaction of Elderly
People”. In line with this objective, the key idea
of EXCITE is to promote the use of a telepresence
robot called GIRAFF to foster interaction and social
participation of older people as well as to provide an
easy means to possible caregivers to visit and interact
with their assisted persons in their living environment
(Cesta et al., 2010).
As said before, telepresence robots have been in-
creasingly proposed to be used in workplace and Mo-
bile Remote Presence (MRP) systems have been stud-
ied as a means to enable remote collaboration among
co-workers (Lee and Takayama, 2011; Tsui et al.,
2011a). Furthermore, MRP systems are also being
used to provide support to elderly people. In this
respect, some initial research exists which aims to
understand the acceptance of older adults, their con-
cerns and attitude toward the adoption of MRP sys-
tems (Beer and Takayama, 2011; Kristoffersson et al.,
2011; Tiberio et al., 2011). The challenge of EX-
CITE is to carry out a set of fielded experiments with
the elderly in their living environment, exploring the
ability of the robot to reduce the sense of social isola-
tion by bridging distances, facilitating interaction and
communication. It is worth highlighting how this pa-
per identifies a path to go beyond the current results
available in literature. Our current work is focused
on the establishment of a methodology for assessing
the long term experience of MRPs on behalf of older
users, thus fostering a longitudinal and ethnographic
2
http://www.aal-europe.eu/
approach based on a rigorous evaluation plan. Before
giving more details on this objective and the work we
are performing we first introduce the MRP platform.
3.1 The GIRAFF Telepresence Platform
GIRAFF is a mobile remote presence robotic plat-
form. It is manufactured by GIRAFF Technologies
AB
3
a Swedish company founded by a team of Sili-
con Valley entrepreneurs. Specifically, it is a remotely
controlled mobile, human-height physical avatar inte-
grated with a videoconferencing system (including a
camera, display, speaker and microphone). It is pow-
ered by motors that can propel and turn the device in
any direction. An LCD panel is incorporated into the
head unit. The GIRAFF’s 14kg weight and integrated
carrying handle allow it to easily be placed in a car
or carried up stairs. A remote user can charge the
GIRAFF by driving it onto the docking station. The
docking station (see Figure 1, lower part) charges the
batteries in under two hours. A full charge is suffi-
cient to allow the GIRAFF to work for over two hours.
The robotic platform is accessed and controlled
via a standard computer/ laptop using a software that
can be downloaded on any PC from the GIRAFF web
site. From a remote location the client (member of
family or healthcare professionals) with limited prior
computer training teleoperates the robotic platform
while older people (end users) living in their own
home (where the robot is placed) can receive their
visit through GIRAFF.
Figure 1: Upper part: a screenshot form the GIRAFF Client.
Lower part: details of the GIRAFF docking station for
recharging.
3
http://www.giraff.org
ICAART 2012 - International Conference on Agents and Artificial Intelligence
654

The software operates essentially like a videocon-
ferencing system. It is necessary to obtain authoriza-
tion from individual care provider, and then connect
to the person you want to visit through the GIRAFF.
The client interface is designed to be as easy to use as
possible (see Figure 1, upper part). A standard com-
puter and its pointing device (such as a mouse) is suf-
ficient. By clicking the mouse on the real time video
image, the robot will followthe selected direction (red
line decide the direction you want to go, green line
when you actually move the robot). If you want to
turn in place, a dragging motion with the mouse on
the real time video image can be made. The GIRAFF
automatically moves until the camera is centered at
the end point of the drag. When GIRAFF is not in use
its display stays in a “sleeping” position and it faces
the wall to ensure individual privacy.
3.2 Key Ideas of the EXCITE Project
The GIRAFF robotic platform is a rather robust telep-
resence prototype, that can be used for a long-term
experience in real world context. Starting from this
platform, the EXCITE project aims at assessing its
validity in the field of elderly support. The main in-
novative concepts the project is based on are the fol-
lowing:
– User Centered Product Refinement. This ap-
proach is based on the idea of obtaining users
feedback during the time they use the robot and
cyclically refine the prototype in order to address
specific needs;
– User tests outside labs, rather then testing the sys-
tem in laboratory setting, the robotic platform is
placed in a real context of use. This approach is
in line with several research that highlights how
systems that work well in the lab are often less
successful in real world environments (Sabanovic
et al., 2006). The evaluation of robots made in a
laboratory environment does not favor the emer-
gence of robotic aid suitability to support elders
who are able to stay in their own homes. For this
reason an essential step is to assess the technology
in the specific contexts in which the technology is
supposed to be used (Hutchins, 1995);
– Use on a time period long enough, to allow ha-
bituation and possible rejection to appear. Indeed,
interviews and survey conducted after a short pe-
riod of time can be limited and can prevent other
effects to emerge. On the contrary, a key aspect
of relationship is that it is a persistent construct,
spanning multiple interactions (Bickmore and Pi-
card, 2005). In this light, in order to assess the
human-robot interaction it is important to inves-
tigate how people interact with robots over long
periods of time.
– Analysis of cultural and societal differences, an
interesting part of our project stems in the idea of
comparing the long term deployment of the telep-
resence platform in different countries so as to al-
low an analysis of cultural and societal differences
over European countries.
Figure 2 gives a s brief sketch of the whole project:
different GIRAFF prototypes are being deployed for
long periods of time (at least three months, and possi-
bly 1 year) in three different countries (Italy, Spain
and Sweden) in real context of use. Feedback ob-
tained from the users (both older users having the
robot at home and the clients, that is people connect-
ing and visiting the older) is used to technically im-
prove the robot. Currently already three different ver-
sions of the prototypes have been realized which in-
clude several improvements.
During this first year of the project we have done
specific work to set up the different test sites. This
allowed us to obtain useful feedback and suggestions
for both technological development and human-robot
interaction features. In what follows, we describe our
progressive work toward a long-term human-robot
interaction assessment and then we discuss some
lessons learned from a more focused technological
point of view.
4 THE EVALUATION EFFORT
During the project activities we conceived a twofold
path for evaluating the Human-Robot Interaction
gathering both feedback from short interactions be-
tween potential users and the GIRAFF robot and also
focusing on a long term assessment plan.
More specifically we identified two tracks for our
effort:
– Short Term Evaluation, that consists of a collec-
tion of immediate feedback of users (both robot
users and remote client users) on the GIRAFF plat-
form, connected to different aspects of the interac-
tion mainly related to the users opinion judgments
and expectation on the GIRAFF platform and the
interaction with it. The first part of the evaluation
entails small periods of interaction between GI-
RAFF and the users to gather immediate feedback
on some aspects identified as relevant.
– Long Term Evaluation, which relates to the study
of the long-term impact of GIRAFF on elderly
users using the system both to communicate with
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
655
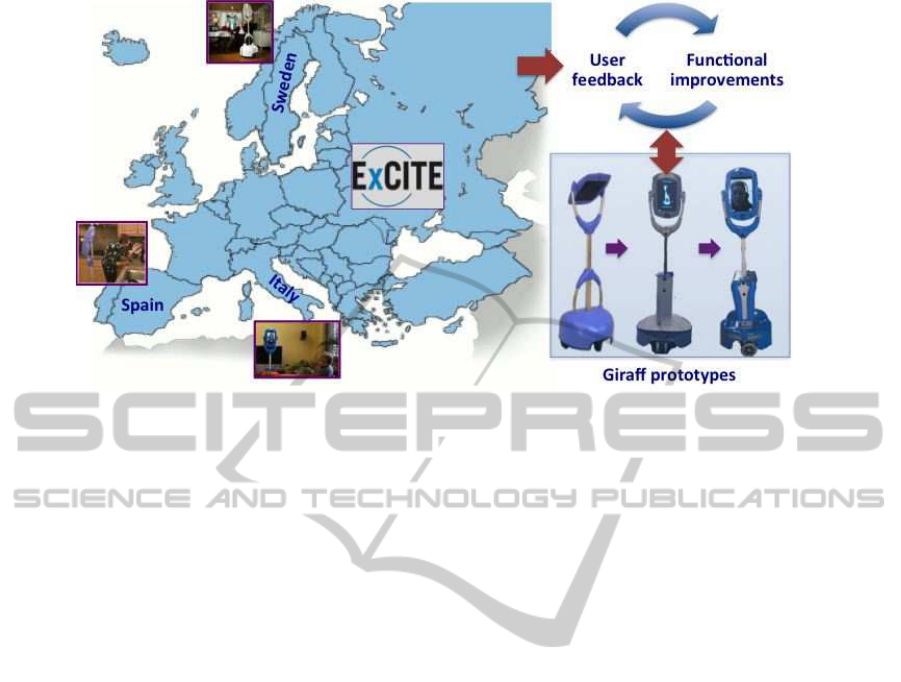
Figure 2: The EXCITE approach.
their relatives and friends and to receive visits
from health care providers and in general care
givers.
The short term evaluation effort, though not sufficient
alone, still provides immediate feedback that can be
used to quickly improve the technological develop-
ment, to eventually add functionalities to the system
or to simply confirm the validity of some technologi-
cal choice. In addition it can give valuable guidance to
the long-term assessment. For this reason we adopted
a combined approach and we are currently involving
participants representativeof both types of users: both
for the client side and the end user side.
Different initiative are ongoing to cover this
twofold approach. We present here some preliminary
results for the short term evaluation and our complete
design for a methodology to assess the long term-
impact.
4.1 Short Term Evaluation
As stated in (Beer and Takayama, 2011), before intel-
ligent technologies would be accepted, it is important
to understand their perception of the benefits, con-
cern and adoption criteria. Those authors recruited
12 old participants giving them first-hand experience
with both meeting a visitors and driving the system.
In our study, we aim at reproducing as much as
possible an “ecological” setting for the experiment.
To this purpose we distinguished the role of the users
and recruited different participants according to their
expected role. Specifically for the client side, we re-
cruited users representative of the potential visitors
of the elderly users among caregivers, nurses, health
workers, etc. For the end user side we interviewed
older adults living alone, or possibly receiving some
kind of health care assistance.
4.1.1 Method
This evaluation was aimed at assessing users reaction
toward the possible adoption of the GIRAFF system
as a means to visit or provide some kind of service
to the elderly users. Aspects investigated were will-
ingness to adopt the robotic solution, advantages and
disadvantages as well as possible suggestions for im-
provements.
Nurses as Clients
Participants and Procedure. Twenty six nurses
form different specialist areas were recruited for this
study. The sample interviewed so far is composed 11
women and 16 men with a mean age of 42 years.
The meeting entailed a tutorial presentation of 20
minutes to describe features and functionalities of the
GIRAFF robot. After this tutorial, a practical session
allowed nurses to operate the system and experience
the different functionalities. Following the tutorial a
focus group was conducted and a final questionnaire
was administrated to assess possible possible applica-
tions of the telepresence robot, the perceived advan-
tages and disadvantagesof the system, thepatient pro-
file best suited to benefit from the use of an aid-based
on telepresence.
Results. A first analysis of the results showed a pos-
itive reaction of the participants to the GIRAFF sys-
tem (see Figure 3). In particular 59% of participants
ICAART 2012 - International Conference on Agents and Artificial Intelligence
656

(a)
(b)
Figure 3: General assessment of the GIRAFF system:
(a) willingness to adopt it; (b) qualitative comparison with
traditional teleconference system like skype.
would be willing to use GIRAFF as an aid support in
his/her profession. No one opposes the use of robots.
In addition most of them judges the GIRAFF sys-
tem as a better tool with respect to traditional telecon-
ference system like Skype. Among the advantages of
the system they mention the mobility of the platform
that allows to have more control over the life of the
end user and a better monitoring of the domestic en-
vironment.
The participants are in favor of the use of robots
to train the family caregiverto small nursing tasks and
constant contact with assisted people. The possibility
of continuous monitoring (see Figure 4) of the patient
at home is considered to be most useful in applica-
tions (48% of participants were in favor of this kind
of application), with support application following at
37%, while the companionship functionality is less
envisaged, maybe also due to the specific type of pro-
fessional activities of participants
4
.
The size of the robot (in particular the size of its
4
It is worth saying that this type of “real users” prefer-
ences are exactly the type of outcomes that are looked for
in order to prioritize issues for a comprehensive roadmap of
robotic research.
Figure 4: Favorite domains of application for the GIRAFF.
base) is one of the most significant disadvantages re-
ported by the sample. Furthermore, a perceived dis-
advantage, shared by most participants is related to
the privacy aspect, especially connected to the possi-
ble family members who share living space with the
elderly patient. A difference emerges in the sample in
relation to gender: women are more willing than men
to use GIRAFF (F(1, 26) = 4.38, p < .05). In addition
they declared that GIRAFF would reinforce their sense
of safety in their work (F(1, 26) = 4.938, p < .05).
The focus group conducted at the end of this anal-
ysis, highlighted some aspects considered as particu-
larly relevant for using GIRAFF in the healthcare do-
main for long term period. These aspects refer to the
need to integrate additional functionalities to:
– support the night vision of the telepresence robot
– enable the system to divert calls when the client is
not connected to the robot via a PC
– integrate the GIRAFF functionalities with other
domotic devices that may be available at home
– integrate the GIRAFF functionalities with physio-
logical sensors to monitor vital parameters of the
assisted person
All these suggestions for technical improvements are
currently inspiring the future modifications of the GI-
RAFF system in line with the user centered approach
pursued in EXCITE
5
.
Older Adults as End-users
Participants and Procedure. To investigate aspects
connected to the end-user interaction with the telep-
resence system we contacted 10 older adults. Four of
them were potential end users who have been asked
to participate in the long-term evaluation described
5
It is worth adding that the integration of our MRP in
a sensorized home environment for continuous monitoring
and health care of the old person is the goal of the recently
approved Giraff+ project that also pursues the goal of a long
term evaluation.
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
657
later in this paper
6
. The remaining participants are
involved in a parallel study, also connected to the
project that aims to validate the GIRAFF system as a
tool for providingremote rehabilitation (Tiberio et al.,
2011).
The procedure followed in this qualitative re-
search entailed an explanation of the the main idea
underlying the telepresence system, showing some
descriptive materials, a video of the GIRAFF system
and, where possible, a practical demonstration of the
system itself. The selection of the material and the
modality to present the system were decided accord-
ing to the time availability, and the specific situation
presented in each evaluation session. Overall, we here
opted for a qualitative analysis given the relatively
small number of the sample.
Results. A qualitativeanalysis of the interview have
been conducted and the most relevant feedback are
here reported in terms of positive and negativeaspects
of the GIRAFF system.
Positive Aspects. Among the positive aspects most
of the subjets reported the following:
– participants judged the visit through GIRAFF as
engaging and “real”
– the robot was pleasant to see
– the ability of the robot to move in the environment
was positively assessed
– users felt physically involved during the interac-
tion
– participants think that the robot would help some-
one living alone at home to feel safer
– participants judged positively both the audio and
the video functionalities
– participants think that interaction through the
robot was spontaneous
Negative Aspects. Among the most negative aspects
we mention:
– the GIRAFF system is too big and consequently
may be not well integrated in a domestic environ-
ment due to its size
– the battery power may be too short
– there may be some problems due to the privacy
issue
– there were some concern related to the safe move-
ment of the robot and to its ability of obstacle
avoidance
6
Two out of these four older adults accepted to have the
robot at home for the long term assessment.
– some “intelligent features”, like the autonomous
recharging of the battery, are missing
– difficulty in connecting the robot to the docking
station
Also this effort showed an overall positive reaction
to the system, even though some improvements are
desired in view of a real usage of the system. It is
worth underscoring that the key point here is the fact
that these qualitative data has been gathered not by
interviewing generic people but “real potential users”
like for example a group of caregivers and old people
that can receive visit through the robot.
4.2 Long Term Evaluation Design
One of the original features of the EXCITE project
consists of realizing long-term experiments involving
older people using GIRAFF from their environment
both to communicate with others and to receive as-
sistance services.
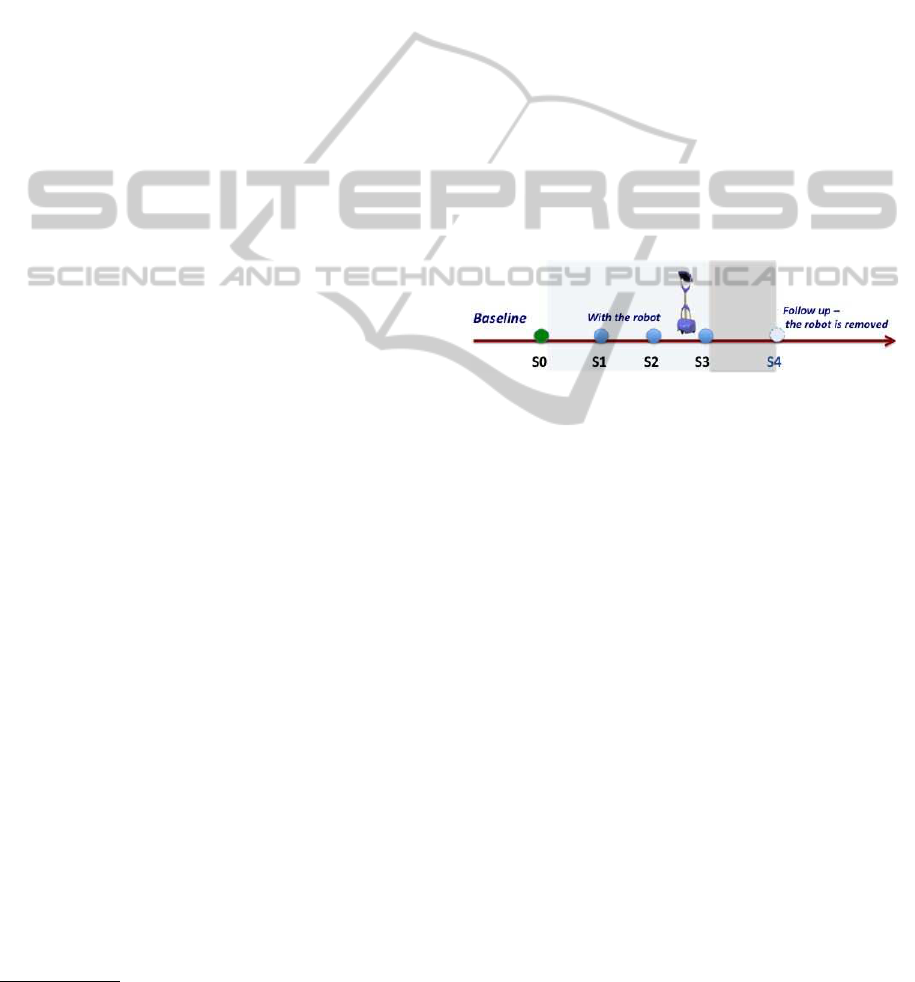
Figure 5: The Long Term Evaluation timeline.
4.2.1 Method
Figure 5 gives a general idea of the method. The eval-
uation entails a period of N months (with 3 ≤ N ≤ 12)
during which the end user will have GIRAFF at home
and the clients can visit him/her through GIRAFF. As-
sessment happens at milestones S
i
. Specifically, after
an initial assessment (S0 in figure) at the beginning of
the experimentation (baseline), the variables of inter-
est are measured at regular intervals (S1-3) to observe
changes over time. At the last month GIRAFF will be
removed from the end user apartment and the same
variables will be again assessed after 2 months from
this removal (S4). Overall the general idea is to use
a repeated measures method to see changes over time
during the long term usage of the robot.
Participants and Procedure. Table 1 lists the pos-
sible types of both clients, who can be a caregiver
(both formal and informal) or a relative/friend, and
the end user who is an elderly living at home. The
three different cases have been identified to cover dif-
ferent situations in which GIRAFF can be deployed.
The type of material used in the long term evaluation
for both the client and the end user depends upon the
type of interaction for which GIRAFF is used. For
ICAART 2012 - International Conference on Agents and Artificial Intelligence
658

Table 1: Different cases for the long term evaluation.
Type of users
CLIENT
Health care
institution
In this case the client is a profes-
sional care giver (formal care-
giver) who uses GIRAFF as a
means to communicate at home
with the elder (end user)
Family member
(caregiver)
In this case a family member
who takes care of the elder (in-
formal caregiver) uses also GI-
RAFF to visit the elder
Other relatives
or friends
In this case the client is a fam-
ily member and/or a friend who
connects through GIRAFF to the
elder. The family member is not
a caregiver in this last case
END USER
Older Adult
In all cases the end user is an
elderly living at home and re-
ceiving visits either form a care-
giver (formal/informal) to re-
ceive assistance, or by relatives
and friends just for social inter-
action
this reason, for each of the three mentioned situations
we had developed (and or selected) a set of question-
naires (almost all validated in the three languages of
the involved countries) aimed at monitoring specific
variables and to be administrated at specific time both
to end users and to clients.
Material. For each of the described case we pre-
pared the material to assess the variables under study
at the specified intervals.
Table 2 lists in detail the different variables and
the related instruments that will be used to measure
the variables over time.
Client Side. Specifically on the client side, during
the initial step (S0), we will use: (a) an informed
consent form describing the aim and procedure of the
study; (b) the socio demographic data form to gather
some relevant information on the user; (c) we devel-
oped on purpose a questionnaire aimed at assessing
the client expectation on the GIRAFF’s ability to ease
the support (Support Expectation). It is worth high-
lighting that we developed two slightly different types
of questionnaires for the formal and informal care-
givers, while for the third type of client we designed a
questionnaire (Influenceon Relationship Expectation)
on the expectation on GIRAFF as a means to ease and
support the remote communication and consequently
the social relationship.
During the following step (S1), for all three types
of clients we will use: (a) questionnaires based on
the SUMI inventory (Sumi, 2011) to assess the us-
ability of the client software: (b) will ask participant
to keep a diary to register the “salient” events of the
visit through GIRAFF in terms of encountered prob-
lems, good features and so on.
During the subsequent step (S2), in addition to the
diary that client will have to keep along the whole ex-
perience with the robot, we make a first assessment of
ability of GIRAFF to ease the support (or the commu-
nication) between the client and the end user through
the Support Assessment and Impact on Relationship
Assessment questionnaires. In addition, during this
phase we will also use the Temple Presence Inven-
tory (Lombard et al., 2009) that is a tool to measure
dimensions of (tele)presence.
At step S3 we use the Positive Affect Negative Af-
fect Scale, PANAS, (Terracciano et al., 2003), and a
final structured interview to assess the overall expe-
rience in terms of the most relevant variables consid-
ered in the study.
After two months from the removal of GIRAFF,
S4 will allow assessing the impact of the GIRAFF ab-
sence through the Support Assessment questionnaire.
End User Side. For the end user receiving the robot
we followed a similar approach, but we focused on
some additional variables that is worth dwelling on.
Specifically, we measure (a) the perceived loneliness
through the UCLA Loneliness Scale (Russell et al.,
1980), which was developed to assess subjective feel-
ings of loneliness or social isolation;(b) the perceived
health status through the SF12 (Ware et al., 1996);
(c) the Multidimensional Scale of Perceived Social
Support (Zimet et al., 1988); (d) Geriatric Depression
Scale (Yesavage et al., 1983): a modified version of
the Health Service Satisfaction Inventory. Finally the
Almere (Heerink et al., 2010) model will allow as-
sessing dimensions of technology acceptance.
In the table, measures highlighted in bold will en-
sure the repeated measures thus allowing to observe
the influence of changes over time. It is worth under-
scoring how this evaluation methodology will allow
monitoring the human-robot interaction over time,
thus contributing to understand the long term impact
of a fully deployed robotic solution.
With the help of the other partner we currently
have all the materials in the three languages and we
are starting the first phase of the long-term evaluation.
The actual implementation of this plan in three
different European countries will also support a cross-
cultural analysis, continuing some work started on
this specific topics (Cortellessa et al., 2008).
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
659

Table 2: Long term evaluation: variables measured along the phases (S0–S4) and related material.
PHASES
S0 S1 S2 S3 S4
CLIENT SIDE
Healthcare
Consent Form,
Socio-Demographics
Data Form,
Support Expectation,
Diary
Usability,
Diary
Support assess-
ment,
Temple Presence
Inventory,
Diary,
PANAS,
PIADS,
Final Interview,
Diary
Support Assess-
ment
Family member
caregiver
Consent Form,
Socio-Demographics
Data Form,
Support Expecta-
tion(informal carer),
Diary
Usability,
Diary
Support assessment
(informal carer),
Temple Presence In-
ventory,
Diary
PANAS,
PIADS,
Final Interview,
Diary,
Support Assess-
ment (informal
carer)
Friends
and/or relatives
Consent Form,
Socio-Demographics
Data Form,
Influence on Relation-
ship Expectation,
Diary
Usability,
Diary
Influence on Re-
lationship assess-
ment(informal
carer),
Temple Presence
Inventory,
Diary
PANAS,
PIADS,
Final Interview,
Diary
Influence on Rela-
tionship Assessment
END USER SIDE
Older adult
Consent Form,
Socio-Demographics
Data Form,
Loneliness (UCLA),
Quality of Life (SF12),
Multidimensional Scale
of Perceived Social
Support,
Geriatric Depression
Scale,
Almere model,
Health Service Satis-
faction Inventory (if
applies)
Loneliness (UCLA),
Multidimensional Scale
of Perceived Social
Support,
Geriatric Depression
Scale,
Attitude
Acceptance,
Health Service Satis-
faction Inventory (if
applies)
Temple Presence Inven-
tory,
Almere model
Loneliness (UCLA),
Quality of Life (SF12),
Multidimensional Scale
of Perceived Social
Support,
Geriatric Depression
Scale,
Almere model,
PANAS,
PIADS,
Final Interview
Loneliness (UCLA),
Quality of Life (SF12),
Multidimensional Scale
of Perceived Social
Support,
Geriatric Depression
Scale,
Health Service Satis-
faction Inventory (if
applies)
5 TECHNICAL CHALLENGES
FOR LONG TERM USE
Most of the paper is dedicated to introduce method-
ology for evaluation. There is an additional aspect
worth commenting on which is connected to the goal
of performing long term evaluation in real robotic
contexts of use: the technological set up for those
real contexts. There is quite an amount of work to
be done in creating robust contexts of use for the MRP
and some general comments can be derivedfrom such
an experience even at an intermediate stage of the
project.
Broadly speaking, the old population demonstrate
limited acceptance of new technology, mainly due to
the fear of complexity in its use. This is particu-
larly true for robotics, as they are concerned about the
system being difficult to learn (e.g., (Demiris et al.,
2004)). Nevertheless, older adults have demonstrated
a willingness to use such technology, when the goal
is assistance for their independent living (Sharit et al.,
2004; Cesta et al., 2007). In the case of MRP is also
important that client users, that teleoperate the robot,
are facilitated in such operation. It is important to
allow them to focus attention on the assistive inter-
action with the old person and, thus, experiencing an
increasing (and easy) projection/immersion in the en-
vironment.
It is worth observing how a Mobile Remote Pres-
ence robot is a relatively simple system. It is com-
pletely operated by the remote user and thus it is usu-
ally not endowed with autonomous behaviors. How-
ever, in our work for fielding the GIRAFF in op-
erational contexts we gathered incremental evidence
that situations exist in which some technical advance-
ments usually connected with autonomous behavior
can add robustness to the whole system in an applica-
tion area where frail users are involved. For example,
ICAART 2012 - International Conference on Agents and Artificial Intelligence
660

the robot should be able to act autonomously when the
operator cannot control the telepresence robot prop-
erly, or when data transmission is lost. Addition-
aly, from the client users’ view, a limited autonomous
behavior can increase their projection capability and
achieve a safe and reliable operation of the telepres-
ence robot in a (potentially) dynamic environment
(Tsai et al., 2007).
5.1 Gaining Robustness by Introducing
Autonomous Capabilities
In this subsection we present some contextualized use
cases for autonomous capabilities that have emerged
from our experience.
Robot Encumbrance. One situation, quite com-
mon in Mediterranean countries, is due to the small
size of apartments where old people live. The GI-
RAFF robot should be installed and operated also in
domestic places of such limited size. Even skilled
client users may have difficulties in controlling the
robot within such small environments.
In this regard, the basic requirements needed to
endow a robotic platform with autonomous behav-
iors are the capabilities of (a) mapping the environ-
ment, (b) localizing itself within a (partially) known
environment and (c) avoiding the (possibly moving)
obstacles. Usually, SLAM techniques (Smith et al.,
1990) are exploited to obtain localization and map-
ping capabilities. Furthermore, many different solu-
tions can be used to implement obstacle avoidance
functionalities (Khatib, 1986). Additionally, the sys-
tem can be equipped with some autonomous naviga-
tion ability to safely guide the telepresence robot to
some specific home location requested by the opera-
tor. For instance, the operator may request the MRP
to reach the kitchen in the apartment so that she can
visually check the status of the stoves.
Docking. A crucial location, for the robot at home,
results to be the docking station used to recharge bat-
teries and park if idle. In fact, since the GIRAFF must
not be left out of the docking station without con-
trol, this is the most important location and the robot
should always be able to reach it. The robot should
also be able to detect the status of its battery and,
whether below a given threshold, automatically reach
the docking station. Indeed, the return to docking is
considered the GIRAFF aspect that requires synthesis
of new solutions. Again here some autonomous capa-
bilities would be of help.
Connectivity. Another important issue of a long
term domestic test site is that very ofter it is not pos-
sible to rely on a continuous active WiFi internet con-
nection (in particular, this issue has been detected as
a quite critical one in both Italy and Spain). Some
time, sudden communication breakdowns may leave
the robot still with no active control. This is highly
risky since the robot may remain stuck in an unsafe
position also preventingthe movementsof the old per-
son at home. In this case, whenever the data transmis-
sion is lost, the robot should automatically reach and,
then, plug at the docking station. Hence, minimizing
the risk to leave the GIRAFF with no charge in the
middle of an apartment.
People Searching. During an emergency call
7
a
client user should take control of the robot and find
the elderly as soon as possible in order to check her
health conditions. In such cases, the GIRAFF plat-
form could be endowed with the capability of au-
tonomously looking for the elder in the apartment in-
stead of requiring the operatorto (potentially) visit the
whole house at random. Then, once the operator takes
the control of the robot, it will find automatically the
proper position to start a new dialogue, minimizing
the movement of the robot in the environment and in-
creasing the effectiveness of the interaction.
People Following. During a dialogue, the operator
would be allowed to focus her attention to the old per-
son movements/gestures by adjusting its position, in-
stead of continuously controlling the robot. An in-
teresting feature would be to enable GIRAFF to auto-
matically identify the direction of the old person who
is speaking and/or autonomously adapt to the position
of the person (for example to maintain the person cen-
tered on the robot’s camera).
Safety. A final point worth being mentioned is the
paramount importance of the safety of platform basic
movements to avoid any scaring movement in prox-
imity of the old person. In this respect recent tech-
nology improvements for fault-free low level behav-
ior like those described in (Bensalem et al., 2010) can
potentially result very useful if integrated.
It is worth observing how all these identified cases
can be already addressed with a smart integration of
functionalities that are within the state-of-the-art of
current autonomous robotics.
7
This is a specific capability that allows to force the
usual operational functionalities. It enables an authorized
client to bypass the old person authorization and connect
with the home environment.
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
661

6 CONCLUSIONS
This paper describes the ongoing work performed
within the EXCITE project that is trying to assess
a robotic telepresence system within the elderly do-
main. Specifically, two important aspects are pre-
sented, that can be considered as mandatory steps for
both a general roadmap in robotics and our specific
work.
On one hand, we have highlighted the importance
of performing ecological experiments, i.e., which re-
produce as much as possible the actual conditions
of use of robotic technology, in terms for instance
of real people who use it and real context of use.
Although still simple in the results, analysis of the
short-term evaluation provides a number of indica-
tions “from the field” that are representative of the ac-
tual users’ expectations, both in relation to the human-
robot interaction and to the most urgent technological
improvements essential for an effective deployment.
Nurses for example, expressed a number of requests
that would be important to fruitfully use the GIRAFF
system as a means to support their work. At the same
time, the technological tests done in real homes, high-
lighted technological barriers that must be necessarily
overcome.
The article’s second contribution concerns our ef-
fort toward a long-term assessment. Other works in
the area have highlighted this need but in this arti-
cle we have proposed a rather elaborated and detailed
methodology for the long-term evaluation that, to the
best of our knowledge, is quite original.
In addressing these two points, there were also a
number of technological challenges and requirements
for “intelligent features” that the technology should
incorporate and that could contribute to solve some
of the open challenges in moving from a short-term
demonstration to a real and continuos use.
At present, we are starting the first stages of the
long-term evaluation and we do expect useful and
valuable information from this effort.
ACKNOWLEDGEMENTS
They are partially supported by the EU under the
Ambient Assisted Living Joint Program – EXCITE
Project (AAL-2009-2-125) and under the ICT Call
7 – Giraff+ Project (GA 288173). Authors are in-
debted to all the project partners for the stimulating
work environment. Interactions with the colleagues
from
¨
Orebro University have been particularly fruit-
ful to synthesize the evaluation plan. Authors would
also like to thank Vittoria Giuliani for comments to
preliminary versions of their work.
REFERENCES
Anybots (2011). Anybots – Your Personal Avatar. http:
//www.anybots.com/. Last checked: March, 2011.
Beer, J. B. and Takayama, L. (2011). Mobile remote pres-
ence for older adults: Acceptance, benefits, and con-
cerns. In Proceedings of Human Robot Interaction:
HRI 2011, pages 19–26, Lausanne, CH.
Bensalem, S., de Silva, L., Gallien, M., Ingrand, F.,
and Yan, R. (2010). “Rock Solid” Software: A
Verifiable and Correct-by-Construction Controller for
Rover and Spacecraft Functional Levels. In i-SAIRAS-
10. Proc. of the 10
th
Int. Symp. on Artificial Intelli-
gence, Robotics and Automation in Space.
Bickmore, T. W. and Picard, R. W. (2005). Establishing
and Maintaining Long-Term Human-Computer Rela-
tionships. ACM Transactions on Computer Human In-
teraction, 12:293–327.
Cesta, A., Coradeschi, S., Cortellessa, G., Gonzalez, J.,
Tiberio, L., and Von Rump, S. (2010). Enabling So-
cial Interaction Through Embodiment in ExCITE. In
ForItAAL. Second Italian Forum on Ambient Assisted
Living, Trento, Italy, October 5-7.
Cesta, A., Cortellessa, G., Giuliani, M., Pecora, F., Scopel-
liti, M., and Tiberio, L. (2007). Psychological implica-
tions of domestic assistive technology for the elderly.
PsychNology Journal, 5(3):229–252.
Cesta, A., Cortellessa, G., Rasconi, R., Pecora, F., Scopel-
liti, M., and Tiberio, L. (2011). Monitoring elderly
people with the ROBOCARE Domestic Environment:
Interaction synthesis and user evaluation. Computa-
tional Intelligence, 27(1):60–82.
Cortellessa, G., Scopelliti, M., Tiberio, L., Koch Svedberg,
G., Loutfi, A., and Pecora, F. (2008). A Cross-Cultural
Evaluation of Domestic Assistive Robots. In Proceed-
ings of AAAI Fall Symposium on AI in Eldercare: New
Solutions to Old Problems.
Demiris, G., Rantz, M., Aud, M., Marek, K., Tyrer, H., Sku-
bic, M., and Hussam, A. (2004). Older adults attitudes
towards and perceptions of smart home technologies:
a pilot study. Medical Informatics and the Internet in
Medicine, 29(2):87–94.
Heerink, M., Kr¨ose, B. J. A., Evers, V., and Wielinga, B. J.
(2010). Assessing acceptance of assistive social agent
technology by older adults: the almere model. I. J.
Social Robotics, 2(4):361–375.
Heeter, C. (1992). Being there: the subjective experience of
presence. Presence: Teleoperators and Virtual Envi-
ronments, 1(2):262–271.
Helal, A. and Abdulrazak, B. (2006). TeCaRob: Tele-Care
using Telepresence and Robotic Technology for As-
sisting People with Special Needs. International Jour-
nal of Assistive Robotics and Mechatronics, 7(3):46–
53.
Hutchins, E. (1995). Cognition in the Wild. MIT Press.
Ijsselsteijn, W. A., de Ridder, H., Freeman, J., and Avons,
S. (2000). Presence: Concept, determinants and mea-
surement. In Proceedings of SPIE.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
662

InTouch (2011). InTouch Health Comprehensive Solu-
tions. http://www.intouchhealth.com/products.html.
Last checked: October, 2011.
Kanda, T., Miyashita, T., Osada, T., Haikawa, Y., and Ishig-
uro, H. (2005). Analysis of humanoid appearances in
human-robot interaction. In IROS 2005. IEEE/RSJ In-
ternational Conference on Intelligent Robots and Sys-
tems.
Khatib, O. (1986). Real-time obstacle avoidance for manip-
ulators and mobile robots. Int. J. Rob. Res., 5:90–98.
Kristoffersson, A., Coradeschi, S., Loutfi, A., and Severin-
son Eklundh, K. (2011). Towards Evaluation of So-
cial Robotic Telepresence based on Measures of So-
cial and Spatial Presence. In Proceedings on HRI 2011
Workshop on Social Robotic Telepresence, Lausanne,
March, pages 43–49.
Lee, M. K. and Takayama, L. (2011). Now, I Have a Body:
Uses and Social Norms for Mobile Remote Presence
in the Workplace. In Proceedings of the 2011 Annual
Conference on Human Factors in Computing Systems,
CHI’11, pages 33–42, New York, NY, USA. ACM.
Lombard, M., Ditton, T., and Weinstein, L. (2009). Measur-
ing telepresence: The temple presence inventory. In
Proceedings of the Twelfth International Workshop on
Presence, Los Angeles, California (USA)., San Fran-
cisco.
Pineau, J., Montemerlo, M., Pollack, M., Roy, N., and
Thrun, S. (2003). Towards Robotic Assistants in Nurs-
ing Homes: Challenges and Results. Robotics and Au-
tonomous Systems, 42(3–4):271–281.
Russell, D., Peplau, L. A., and Cutrona, C. E. (1980). The
revised ucla loneliness scale: Concurrent and discrim-
inant validity evidence. Journal of Personality and
Social Psychology, 39:472–480.
Sabanovic, S., Michalowski, M., and Simmons, R. (2006).
Robots in the wild: Observing human-robot social in-
teraction outside the lab. In Proceedings of the In-
ternational Workshop on Advanced Motion Control,
Istanbul, Turkey. ACM.
Saffiotti, A. (2009). The Concept of Peis-Ecology: Inte-
grating Robots in Smart Environments. Acta Futura,
3:35–42.
Schloerb, D. (1995). A quantitative measure of telepres-
ence. Presence: Teleoperators and Virtual Environ-
ments, 4:64—80.
Sharit, J., Czaja, S. J., Perdomo, D., and Lee, C. C.
(2004). A cost-benefit analysis methodology for as-
sessing product adoption by older user populations.
Applied Ergonomics, 35(2):81 – 92.
Smith, R., Self, M., and Cheeseman, P. (1990). Estimating
uncertain spatial relationships in robotics, pages 167–
193. Springer-Verlag New York, Inc., New York, NY,
USA.
Sumi (2011). Software Usability Measurement Inventory,
University College Cork. http://sumi.ucc.ie/. Last
checked: November 2011.
Terracciano, A., McCrae, R. R., and Costa, P. T. (2003).
Factorial and construct validity of the italian positive
and negative affect schedule (panas). European jour-
nal of psychological assessment official organ of the
European Association of Psychological Assessment,
19(2):131–141.
Thacker, P. (2005). Physician-robot makes the rounds. Jour-
nal of Telemedicine and Telecare, 293(2):150.
Tiberio, L., Padua, L., Pellegrino, A., Aprile, I., Cortel-
lessa, G., and Cesta, A. (2011). Assessing the tol-
erance of a telepresence robot in users with Mild Cog-
nitive Impairment – A protocol for studying users’
physiological response. In Proceedings on HRI 2011
Workshop on Social Robotic Telepresence, Lausanne,
March, pages 23–28.
Tsai, T. C., Hsu, Y. L., Ma, A. I., King, T., and Wu., C. H.
(2007). Developing a telepresence robot for interper-
sonal communication with the elderly in a home envi-
ronment. Telemedicine and e-Health, 13(4):407–424.
Tsui, K. M., Desai, M., Yanco, H. A., and Uhlik, C.
(2011a). Exploring use cases for telepresence robots.
In Proceedings of the 6th international conference on
Human-robot interaction, HRI ’11, pages 11–18, New
York, NY, USA. ACM.
Tsui, K. M., Norton, A., Brooks, D., Yanco, H. A., and
Kontak, D. (2011b). Designing Telepresence Robot
Systems for Use by People with Special Needs. In
Proceedings of the International Symposium on Qual-
ity of Life Technologies 2011: Intelligent Systems for
Better Living (held in conjunction with RESNA 2011).
VGo (2011). Introducing VGo. From anywhere. Go any-
where. http://vgocom.com/. Last checked: March,
2011.
Ware, J. E. J., Kosinski, M., and Keller, S. D. (1996). A 12-
item short-form health survey: Construction of scales
and preliminary tests of reliability and validity. Medi-
cal Care, 34(3).
WillowGarage (2011). Texai remote presence system.
http://www.willowgarage.com/pages/texai/overview.
Last checked: March, 2011.
Yesavage, J. A., Brink, T. L., Rose, T. L., Lum, O., Huang,
V., Adey, M., and Leirer, V. O. (1983). Develop-
ment and validation of a geriatric depression screen-
ing scale: a preliminary report. Journal of Psychiatric
Research, 17(1):37–49.
Zimet, G. D., Dahlem, N. W., Zimet, S. G., and Farley,
G. K. (1988). The multidimensional scale of per-
ceived social support. Journal of Personality Assess-
ment, 52(1):30–41.
ADDRESSING THE LONG-TERM EVALUATION OF A TELEPRESENCE ROBOT FOR THE ELDERLY
663
