
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
Mauro Dragone
CLARITY Centre for Sensor Web Technologies, University College Dublin (UCD), Belfield, Dublin, Ireland
Keywords:
Autonomic software, Self-* software systems, Agent oriented software engineering, Component based
software engineering.
Abstract:
This paper proposes the adoption of the Belief- Desire-Intention (BDI) agent model for the construction of
component & service-based software systems with self-configuring, self-healing, self-optimizing, and self
protecting (self-*) properties. It examines component & service, and agent technologies, and shows how to
build a component & service-based framework with agent-like autonomous features. This paper illustrates
the design of one such framework, Self-OSGi, built over Java technology from the Open Service Gateway
Initiative (OSGi). The use of the new framework is illustrated and tested with a simulated robotic application
and with a dynamic service-selection example.
1 INTRODUCTION
Today, autonomic and adaptive software architectures
are pursued in a number of research and application
strands, including Robotics, cyber-physical systems,
wireless sensor networks, and pervasive and ubiqui-
tous computing.
In order to operate in these highly dynamic, un-
predictable, distributed and open environments, these
software systems must exhibit self-configuring, self-
healing, self-optimizing, and self protecting (self-*)
properties.
These problems are being addressed by both the
Component-Based Software Engineering (CBSE) and
the Agent-Oriented Software Engineering (AOSE)
paradigms, each offering a modular design by which
to encapsulate, integrate and organize the different
systems functionalities
CBSE operates by posing clear boundaries be-
tween architectural modules (the components) and
guiding the developers in re-using and assembling
these components into applications. This typically
involves an unambiguous description of the compo-
nent’s behavioral properties, and the set of their legit-
imate mutual relationships, in terms of provided and
required interfaces (the services).
More recently, in order to adapt to varying re-
source availability and to increase system fault-
tolerance, component frameworks are also provided
with limited run-time flexibility through late-binding
and dynamic wiring of component’s interfaces.
Noticeably, this makes component & service
based systems already resemble AOSE solutions, by
favouring a component-centric rather than a global
system perspective. However, they fail to provide an
adequate support for these adaptive implementations,
in terms of a common adaptation model and/or adap-
tation steps. Thus, the developer has to write cus-
tom, application-specific adaptation code. This makes
difficult to ensure that a consistent and interoperable
adaptation strategy is applied throughout all the com-
ponents in one application, and also to maintain, and
re-use these strategies across multiple applications.
In contrast, AOSE provides a method of abstrac-
tion and system decomposition based on agentifica-
tion. This transforms a software application into a
goal-oriented, autonomous agent by building a wrap-
per around it so it can interoperate with the rest of
the system through standard, Agent Communication
Language (ACL) interfaces and associated coordina-
tion protocols.
However, the emphasis of AOSE and associated
multiagent programming platforms and toolkits is the
coordination of large scale, deliberative multiagent
systems (MASs) while issues arising from low-level,
application specific functionalities are often over-
looked. Consequently, as noted in (Kim, 2005), us-
ing an agent platform limit the acceptance of mo-
bile agents as simple programming constructs, as the
programmer is forced to center its development, its
programming units, and its whole applications on
the concept of agent. Rather than a middleware-
type complement to traditional (object/component-
oriented) software development, agents then become
200
Dragone M..
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI.
DOI: 10.5220/0003890302000210
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 200-210
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

the frontware and require the definition of complex
interfaces toward the application and operating sys-
tem resources.
These problems are only partially addressed by
recent attempts to standardise these interfaces, such
as with the SoSAA framework (M. Dragone and
O’Hare, 2009b), and the Environment Interface Stan-
dard (T. M. Behrens and Hindriks, 2009), While all
these approaches promote the interoperability in the
way agents can operate in different environments, in
different measures they also worsen the barrier be-
tween agent-based solutions and other mainstream
software engineering approaches by advocating a
clear-cut separation between agent - providing the in-
telligence - and non-agent approaches - carrying out
application-specific functions.
These are the main motivations for seeking tightly
integrated architectures that leverage the different
characteristics and advantages of AOSE and CBSE.
In particular, the focus of this work is the unifica-
tion between agent, component and service concepts
in a single methodology for the construction of auto-
nomic software systems with Self-* properties. On
one hand, this work aims to define a set of re-usable,
modular end extensible adaptation mechanisms for
component & service-based systems. On the other
hand, the same approach will produce modular and
lightweight agent systems that are tightly integrated
with mainstream component & service technology.
The remainder of the paper is organized in the fol-
lowing manner: In order to draw a parallel between
the CBSE and AOSE paradigms and guide the de-
sign of hybrid CBSE/AOSE systems, Section 2 sum-
marises the popular Belief-Desire-Intention (BDI)
agent model while Section 3 examines the most im-
portant characteristics of component & service frame-
works. Section 4 provides an overview of the most
significant agent/component integration approaches
attempted in past research. Section 5 translates the
BDI agent model into component & service-based
concepts. Section 6 introduces Self-OSGi, a novel
agent toolkit, which is developed using the Open Ser-
vice Gateway initiative (OSGi) component & service
technology (OSGi, 2011). Section 7 illustrates the use
of Self-OSGi and tests its performance with a robotic
application and a dynamic service-selection example.
Finally, Section 8 summarizes the contributions of
this paper and points to some of the directions to be
explored in future research.
2 THE BDI AGENT MODEL
The Belief, Desire, Intention (BDI) is undoubtedly
the most popular agent model, with many implemen-
tations directly related to Rao & Georgeff’s abstract
BDI architecture (Rao and Georgeff, 1992) and its
Procedural Reasoning System (PRS) implementation
(Georgeff and Lansky, 1985).
Kinny et al. (D. Kinny and Rao, 1996), describes
the design of a BDI agent in terms of three compo-
nents:
• A Belief Model, describing the information about
the environment and internal state that an agent
may hold, together with the actions it may per-
form.
• A Goal Model, describing the desires that an agent
may possibly intend, and the events to which it
can respond
• A Plan Model, describing the set of plans avail-
able to the agent for the achievement of its goals
While these traits were introduced to allow the
computational tractability of the model, they are now
recognized as being the most distinctive characteris-
tics of BDI systems in general for their ability to sup-
port rational, resource-bounded reasoning in dynamic
and uncertain domains.
Beliefs, for example, are essential since an agent
has limited sensory ability and needs to build up its
knowledge of the world over time. In this sense, be-
liefs - usually represented with first order logic pred-
icates - serve as a cache with which the agent can
remember past events or other important information
that could be costly to re-compute from raw percep-
tual data or inferred logically.
The distinctions between goals and plans con-
stitute an important source of modularity that con-
tributes to the agent’s ability to cope with contingen-
cies. The fundamental observation is that goals, as
compared to plans, are more stable in any application
domain and multiple plans can be used/attempted to
achieve the same goals. This also allows examining
the application domain in terms of what needs to be
achieved, rather than the types of behaviour that will
lead to achieving it.
PRS implements a computationally tractable BDI
model with the following simplifying assumptions:
• The system explicitly represents beliefs about the
current state of the world as a ground set of lit-
erals with no disjunctions or implications (as in
STRIPS).
• The system represents the information about the
means of achieving certain future world states and
the options available to the agent as pre-compiled
plans.
Each plan in the plan library can be described in
the form e : Ψ ← P where P is the body of the plan,
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
201

e is an event that triggers the plan (the plan’s post-
conditions), Ψ is the context for which the plan can
be applied (which corresponds to the preconditions of
the plan).
The body of each plan is a procedural descrip-
tion containing a particular sequence of actions and
tests that may be performed to achieve the plan’s post-
condition. Plans may also post new goal events, lead-
ing AND/OR goal-plan execution trees. For a plan to
succeed all the subgoals and actions of the plan must
be successful (AND); for a subgoal to succeed one of
the plans to achieve it must succeed (OR).
When a plan step (an action or sub-goal) fails for
some reason, this causes the plan to fail, and an alter-
native applicable plan for its parent goal is tried. If
there is no alternative applicable plan, the parent goal
fails, cascading the failure and search for alternative
plans one level up the goal-plan tree.
Goal events in PRS are posted by using special
temporal operators like achieve and maintain. The
achieve operator is used to request the achievement
of a new goal. For instance, an agent in control of
a thermostat may be instructed with a new set-point
temperature by posting the goal achieve(T>20). The
mantain operators specify a homeostatic goal - one
that must be re-achieved if it ever becomes unsatis-
fied.
The ability to search for alternative applicable
plans when a goal is first posted or when a previously
attempted plan has failed enables these systems to
handle dynamic environments. The final decision of
which plan to activate is performed using meta-level
procedures implementing application-specific strate-
gies, for example, by considering user-defined priori-
ties.
Finally, in PRS-like BDI systems, desires and
goals are represented only in the transient form of
goal events (posted by the application), while the in-
tentions to purse them is stored implicitly in the stack
of plans they triggered. This poses an obstacle to the
effective decoupling between plans and goals, forc-
ing, for instance, the agent to drop goals for which no
feasible plan can be attempted at the time the goal is
posted. Such an issue is addressed in modern agent
systems, such as Jadex, by incorporating explicit and
declarative goal representations into the agent inter-
preter in order to ease the definition of goal delibera-
tion strategies (Alexander Pokahr, 2005).
3 COMPONENTS & SERVICES
The Open Service Gateway Initiative (OSGi),
CORBA Component Model, Microsoft Object
Model, Enterprise JavaBeans, and Fractal are some
of the mainstream component-enabling technologies
used for the creation of many industrial-strength soft-
ware systems. Conceptually, the same technologies
also provide a composite model for service oriented
architectures, by helping to design systems in terms
of application components that can expose their
public functionality as services as well as invoke
services from other components.
3.1 Component Containers
One of the most important common concepts among
component-enabling technologies is the relationship
between a component and its environment, wherein a
newly instantiated component is provided with a ref-
erence to its container or component context. The
component container can be thought of as a wrapper
that deals with technical concerns such as synchro-
nisation, persistence, transactions, security and load
balancing. The component must provide a technical
interface so that all components will have a uniform
interface to access the infrastructure services. For in-
stance, a common solution to implement activity-type
components, i.e. components that need to attend to
their process rather than merely react to events, is to
segment these activities in steps, which are then exe-
cuted by a scheduler - usually shared among multiple
components.
Most relevant for this paper, OSGi defines a stan-
dardised component model and a lightweight con-
tainer framework, built above the JVM. OSGi is used
as a shared platform for network-provisioned compo-
nents and services specified through Java interfaces.
Each OSGi platform facilitates the dynamic installa-
tion and management of units of deployment, called
bundles, by acting as a host environment whereby var-
ious applications can be executed and managed in a
secured and modularised environment. An OSGi bun-
dle organises the frameworks internal state and man-
ages its core functionalities. These include both con-
tainer and life cycle operations to install, start, stop
and remove components as well as checking depen-
dencies.
3.2 Component & Service Adaptation
Many of the infrastructural services associated with
component contexts act as late-binding mechanisms
that can be used to defer inter-component associations
by locating suitable collaboration partners. Through
these brokering mechanisms, components do not need
to be statically bound at design/compilation time but
can be bound either at composition-time or at run-
ICAART 2012 - International Conference on Agents and Artificial Intelligence
202

time in order to favour the construction of adaptable
software architectures.
For instance, the Activator class in OSGi, the
BeanContext, and the components membrane in Frac-
tal enable components to look up services in the
frameworks service registry, register services, access
other components, and install additional components
within the local platform.
The separation between component’s services and
their actual implementation is the key to the creation
of self-managing and adaptable architecture.
In striving toward these solutions, a formal base is
usually required to describe the provided and required
features of individual components and also important
semantic aspects, such as the correct way those fea-
tures are to be used. With OSGi, developers can as-
sociate lists of name/value attributes to each service,
and use the LDAP filter syntax for searching the ser-
vices that match given search criteria. Furthermore,
Declarative Services (Humberto Cervantes, 2003) for
OSGi offers a declarative model for managing multi-
ple components within each bundle and also for au-
tomatically publishing, finding and binding their re-
quired/provided services. This minimizes the amount
of code a programmer has to write; it also allows ser-
vice components to be loaded only when they are
needed (Delayed Activation). Declarative Services
indicates if a required service is mandatory or op-
tional. The binding makes the life cycle of the com-
ponent dependent on the presence of that linkage, re-
spectively having its state as active or passive depend-
ing on the presence or absence of the component’s de-
pendencies.
These mechanisms are not limited to components
and services running on a single platform. Remote
service bindings are usually achieved through port
and proxy mechanisms. For example, in both R-
OSGi and D-OSGi, remote bindings can be viewed
as connection points on the surface of the component
where the framework can attach (connect) references
to provides-ports provided by other components. The
framework is then responsible for returning the cor-
rect Java object when a port is requested by a compo-
nent. It either calls the appropriate methods of the lo-
cally available service implementation object or trans-
lates the Java method calls to messages, sends them to
a remote container (e.g., availing of Java RMI, SOAP,
or JXTA), waits for remote execution and then returns
the value contained in the received message.
In the OSGi implementation OSCAR, the same
mechanism is also used to support intelligent hot
swapping of services to implement fault-tolerant sys-
tems. Specifically, as every service in OSGi may be
given a certain rank which can be used to describe its
quality and importance, when queried about a partic-
ular service, OSCAR automatically tries to locate the
highest-ranked implementation.
A-OSGi (J. Ferreira and Rodrigues, 2009) goes
a step further by providing a number of mechanisms
that can be used to create self-adaptive architectures.
Firstly, a monitor component measures the CPU and
memory used by each bundle by: (i) altering the OSGi
life cycle layer so that all the threads in a bundle be-
long to the same thread group, and by (ii) provid-
ing each service client with a proxy that executes the
service methods within the same thread group. Sec-
ondly, a planning component interprets Event Condi-
tion Action (ECA) rules specifying adaptation actions
to be executed in response to specific events and given
conditions. Finally, an execution component applies
these actions to their target components. Specifically,
A-OSGi considers three main action types, namely:
1) specify rules for service bindings, in such a way
that a specific bundle is prohibited, or obliged, to use
some specific service implementation; 2) change ser-
vice properties, for instance change a parameter asso-
ciated with a service implementation; and 3) control
the life cycle of a bundle, by either starting or stop-
ping bundles.
4 RELATED WORK
A number of works have looked at leveraging both
component and agent approaches for the development
of adaptive software systems.
A component-based approach in the construction
of multi agent systems has been supported by numer-
ous researchers in the past. This typically considers
the components to be simply the building blocks from
which agents are constructed (M. Amor and Troya,
2003). An advantage of this approach is the abil-
ity to take domain-specific issues into account at the
component level. The decisions made on these issues
can therefore be separated from the task of construct-
ing the multi agent system as a whole, thus simpli-
fying the process. The resulting agent applications
inherit some of the (functional/non-functional) prop-
erties from the underlying component framework.
However, this form of technical integration does not
contribute much to a conceptual combination of both
paradigms as, once they are built, agents remain the
only primary entity form.
A different integration approach is advocated in
SoSAA (M. Dragone and O’Hare, 2009b), in which
an high-level agent framework supervises a low-level
component-based framework. The latter provides a
computational environment to the first, which then
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
203

augments its capabilities with its multi-agent organi-
sation, ACL communication, and goal-oriented, BDI-
style reasoning. A SoSAA Adapter interface pro-
vides meta-level sensors and meta-level actuators to
operate on the component layer, to load, unload, con-
figure components, observe their internal status, and
bind their provided/required interfaces. Components
are left to automatically carry out lower-level be-
haviours and can interact through a variety of non-
ACL collaboration styles, including method calls,
messages and events. The deliberative layer makes
decisions about when such behaviours and communi-
cation mechanisms are necessary or desirable in or-
der to satisfy overall system and application require-
ments. However, keeping neatly separated compo-
nents and agents fails to contribute much in consol-
idating both paradigms. Furthermore, the use of two
separate frameworks means that the resulting systems
are subjected to both development and run-time over-
heads.
Removing the need for a separate infrastructure
shared by a large number of distributed applications
is what motivates the approach followed in the M&M
framework (Kim, 2005). In contrast to application
development centred upon agent platforms, M&M
applications become agent-enabled by incorporating
well-defined binary software components into their
code. These components give the applications the
capability of sending, receiving and interacting with
mobile agents. The applications themselves are devel-
oped using the current industry best practice software
methods (JavaBeans) and become agent-enabled by
integrating the mobility components. Such an ap-
proach succeeds in moving some agent mechanisms
into the middleware layer. However, M&M only
addresses agent mobility while components are not
equipped with goal-oriented reasoning capabilities.
More recently, the Active Component (AC) con-
cept (Lars Braubach, 2010) has been proposed as a
way to integrate successful concepts from agents and
components as well as active objects and make those
available under a common umbrella. Active compo-
nents are autonomous acting entities (like agents) that
can use message passing as well as method calls (like
active objects) for interaction. They may be hierarchi-
cally structured and are managed by an infrastructure
that ensures important non-functional properties (like
components).
The AC framework has been realized in the Jadex
AC platform. In particular, Jadex AC runs on an ex-
tended Jade platform and supports component types
(kernels) for BDI agents, as well as simpler, task-
specific agent models. Noticeably, such an approach
defines a proprietary component or agent frameworks
and does not leverage mainstream component-based
initiatives and standards, such as OSGi.
5 COMPONENTS & SERVICES
AGENT MODEL
In order to inform the design of component & ser-
vice agent systems, and before dwelling on the details
of Self-OSGi’s implementation, this section translates
the BDI model into general component & service con-
cepts.
5.1 Modular Belief Model
Rather than storing all the agent’s beliefs into a single,
centralized belief set, a component & service-based
organization can be used to access and distribute the
processing of information across the system. Specif-
ically, an agent may use a number of sensor com-
ponents to interface with its environment. Each of
these components produces data that can be exported
with any of the collaboration styles afforded by main-
stream component & service-enabling technologies
(procedural calls, messaging, events). This informa-
tion can be fed to other perception components, for
instance, to infer situations or test conditions involv-
ing multiple beliefs.
Such an approach enables the construction of a va-
riety of perception architectures to fit with the sensors
available to the agent and also with the run-time re-
quirements posed by the specific agent’s perceptual
processes. In addition, since each sensor and percep-
tual process must provide a strongly typed definition
of their required/provided services, such clear depen-
dencies pose an upper-bound to the amount of data
that must be processed at any given time by each com-
ponent.
5.2 Service Goal Model
Similarly to the separation the separation between
component’s services and their actual implementa-
tion, the separation between goals and plans in BDI
agents is the key to the creation of self-managing and
adaptable architecture.
To this end, it is useful to introduce the concept of
Service Goal, informally defined as the interface of a
service that may be used to achieve one of the agent’s
goals.
Service goals may represent either: (i) sub-goals
defining the desired conditions to bring about in the
world and/or in the system’s state (for instance, the
service (void) atLocation(X, Y) may be used by a
ICAART 2012 - International Conference on Agents and Artificial Intelligence
204
robotic agent to represent the goal of being at a given
location), and (ii) sub-goals subtending the exchange
of information. Service goals that are used to access
data and to subscribe to data updates and event noti-
fications fall into the latter category. For instance, the
service goal Image getImageCamera() may be used
by a robotic agent to express the goal of retrieving the
last frame captured by one of its cameras.
In addition, service goals’ attributes may be
used to further characterise each service goal,
e.g. the characteristic of the information re-
quested/granted, as well as important non-functional
parameters. For instance the atLocation service goal
may have the attribute Min/MaxVelocity to specify
the minum/maximum velocity the robot should/may
travel. The attribute MinimumFrameRate may be
used to specify the mimum frame rate for the image
captured with the getImageCamera() service, while
the Side attribute, with values in {left, right}, may be
used to specify which one of the robotic cameras must
be used.
5.3 Component Plan Model
A Component Plan is informally defined as a com-
ponent implementing (providing) a service goal (its
post-condition). A component plan may require a
number of service goals in order to post sub-goals,
to perform actions, and also to acquire the informa-
tion it needs to achieve its post-condition. Compo-
nent plans may attend their activities with their own
thread of control. In addition, they may react to in-
coming messages/events, and also export functions to
a scheduler used for control injection. For instance,
a MoveTo component plan may process the images
from a robot’s cameras and control the velocity and
the direction of the robot to drive it safely toward a
given location. The same component plan may sub-
scribe to impact alert notifications generated by the
onboard bumper sensor, and stop the robot upon the
reception of one such alert.
5.4 Goal Manager
Section 2 has discussed how an agent must rely on
explicit representations of its own goals in order to
keep track of goals achieved and yet to achieve.
To this end, it is useful to introduce the concept of
Goal Manager, that is, a component used to decou-
ples the plan requesting a service goal from the com-
ponent plan ultimately providing it. Invoking a ser-
vice goal should first trigger the activation of the cor-
responding Goal Manager, which then will take care
to invoke one of the component plans able to achieve
it.
Thanks to its mediation, a Goal Manager can be
used to re-invoke the same service goal upon failure
of the component plan first used to achieve it. Cru-
cially, further invocations may use different imple-
mentations of the service, i.e. different component
plan options. In addition, the Goal Manager can be
used to maintain execution statistics for each compo-
nent plan option, in order to drive the future selection
of the best suitable one, e.g. the one less likely to fail,
and/or with better performance.
6 SELF-OSGI
IMPLEMENTATION
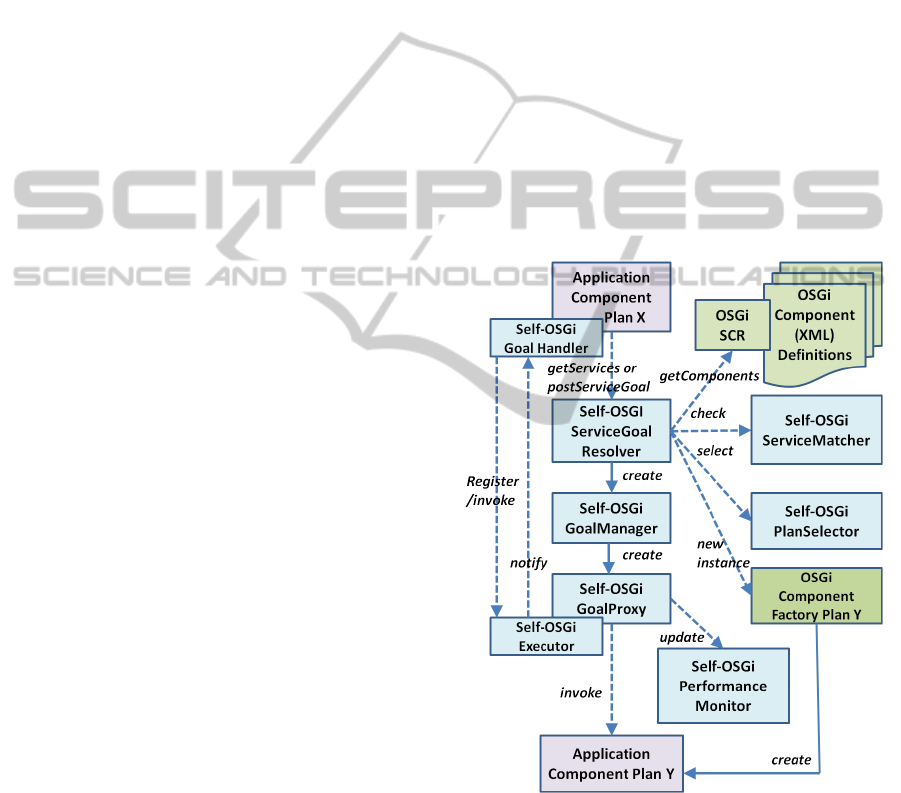
Figure 1 shows a diagram of the main classes involved
in the operation of Self-OSGi, including pre-existing
OSGi classes, and a couple of example application
component plans (X and Y)
Figure 1: Self-OSGi System Diagram.
The OSGi Service Component Runtime (SCR) is
part of the Declarative Service (DS) bundle. Compo-
nents are activated and deactivated under the full con-
trol of SCR. SCR bases its decisions on the informa-
tion in the components definition stored in XML files,
which describe the services that are implemented by
the component, and its dependencies on other ser-
vices. SCR will automatically register every service
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
205

provided by the component into the central service
registry of the platform, and bind every service re-
quired by the components with those available in the
registry.
If a components description specifies the factory
attribute of the component element in its XML defi-
nition, SCR will register a OSGi Component Factory
service. This service allows client bundles to create
(newInstance()) and activate multiple component, on
demand, and dispose of them after they have been
used.
The Self-OSGi ServiceGoalResolver provides a
transparent resolution service (postServiceGoal()),
which can be used explicitly by application compo-
nent plans to get the reference to the implementation
of the service goals they need. In the example in the
diagram, the ServiceGoalResolver is used to get a ref-
erence to an implementation of the service goal G1 to
be called by the component plan X. Alternatively, the
ServiceGoalResolver can register the OSGi Frame-
work Find Hook Service in order to be called during
framework service find (get service references) opera-
tions. Noticeably, the latter approach does not require
any intervention to the application code, (which can
be developed in terms of plain old java objects (PO-
JOs), thus making very easy to apply Self-OSGi to
pre-existing applications.
On its own, the OSGi SCR is only able to satisfy
a service request by looking at components already
active or pending activation. However, the agent ex-
ecution model requires the on-demand activation of
component plans. For this reason, the ServiceGoal-
Resolver collaborates with the OSGI Factory Com-
ponent Service (not depicted in the diagram) and with
the SCR to create and bind component plans on de-
mand.
Once called by the framework or called explicitly
by component plans in need for services, the Service-
GoalResolver creates a Self-OSGi Goal Manager,
which will install a GoalProxy object (implemented
using the Java dynamic proxy class) by registering it
to the OSGi service registry in place of the original
requested service.
After that, the SCR will automatically bind the
GoalProxy to the component plan that has requested
the service goal. However, only when the service goal
is finally invoked, the GoalProxy will trigger the se-
lection of a suitable service goal’s implementation. To
do this, the GoalProxy will contact the GoalManager,
which will then ask the ServiceGoalResolver to trig-
ger the selection of the most suitable component plan
implementing the requested service goal.
The ServiceGoalResolver will use the Self-OSGi
ServiceMatcher and the Self-OSGi Component-
PlanSelector to identify, respectively, (i) which com-
ponents are suitable to be executed in the current con-
text (options), and (ii) which option, among all the
suitable ones, is deemed to be the best to satisfy the
request at hand.
By default, the ServiceMatcher filters out compo-
nent plans by using the LDAP filter query specified
with the original service request (getServices). How-
ever, in order to more accurately replicate the BDI
agent model, it is important to be able to check the
feasibility of a particular component plan at the time
its post-condition service goal is invoked, also by ex-
amining the value of the parameters used in its invo-
cation.
To this end, Self-OSGi relies on a programming
convention, which demands the component plan to
postpone the actual execution of the service goal (and
also the loading of service sub-goals) until it veri-
fies that the service goal can be attempted in the cur-
rent context. It is the responsibility of the component
plan’s developer to (i) make sure that the verification
of the precondition will be as lightweight as possible,
and (ii) that it will raise an exception if the compo-
nent plan should not be used in the current context.
In this manner, Self-OSGi will quickly skip all the
unsuitable options (in the order they are ranked by the
ComponentPlanSelector) before executing the service
goal.
The Goal Proxy measures execution statistics
(CPU system and user time) for both synchronous and
asynchronous invocation to its corresponding service
goal. A number of dedicated attributes in the origi-
nal service goal request can be used to alter the call
semantic, including MaxAttempts (used to specify the
number of invocation to be attempted upon failure),
and DelayBetweenAttempts (used to specify a delay
between each attempts). Crucially, after each failed
attempt, the goal proxy will contact the Goal Man-
ager, in order to trigger the resolution of a (possibly)
different implementation (plan option).
A Self-OSGI GoalHandler class may be used to
support asynchronous operations. If the requester reg-
isters a GoalHandler, the goal proxy will schedule
each invocation with a platform’s scheduler (imple-
mented over the java.util.concurrent.ExecutorService
class). Group-type specializations of the goal han-
dler class exist, such as ANDGoalHandler and OR-
GoalHandler, which are used, respectively, to de-
fine conjunctions and disjunctions of groups of ser-
vice goals. Noticeably, using group goal handlers
breaks the POJO programming model, as the devel-
oper needs to incorporate these Self-OSGi specific
classes into its code.
Finally, the Self-OSGI PerformanceMonitor
ICAART 2012 - International Conference on Agents and Artificial Intelligence
206

class collects the performance statistics for all the
component plan options. This class associates a prior-
ity to each component option. By default, the priority
is computed by considering both the success rate (the
rate between the number of successful invocation and
the total number of invocation) and the speed to which
the component had satisfied past requests.
7 TESTS
Self-OSGi is being used to re-factor a number of pre-
existing applications, including robot control and dis-
tributed information retrieval systems. Developers
can add Self-* capabilities to their OSGi applications
by using the Self-OSGi Core bundle (which consumes
31K on the file system).
By way of example, the following code is part of
a robot navigation test that instructs a mobile robot to
move towards a given location while trying to detect a
soccer ball via its on-board camera. The example re-
ported here does so by explicitly using the Self-OSGi
postServiceRequest() function to resolve two service
goals, respectively RecognizeObject and BeAtLoca-
tion, before adding them to the same ANDGoalHan-
dler and waiting for the successful completion of both
service goals.
// Navigation \& Object Tracking Test
g1 = (ObjectRecognition)
serviceResolution.postServiceRequest
(ObjectRecognition.class.getName(),
"&(maxAttempt=10)(object=ball")");
// set property for reliable navigation service
...
g2 = (BeAtLocation)
serviceResolution.postServiceRequest
(BeAtLocation.class.getName(),
"&(maxAttempt=10)");
g1.subscribeObjectRecognitionEvents();
g2.beAtLocation(x,y);
andGoalHandler.add(g1).add(g2).Wait();
The following is part of the XML definition used
to describe a NavigateViaLaser component plan able
to achieve the beAtLocation service goal (as specified
in the emphservice XML element).
<scr:component xmlns:scr=
"http://www.osgi.org/xmlns/scr/v1.1.0"
factory="NavigateViaLaserFactory"
name="NavigateViaLaser">
<implementation class=
"ucd.robotics.impl.NavigateViaLaserImpl"/>
<service>
<provide interface=
"ucd.robotics.goals.GoalBeAtLocation"/>
</service>
<reference cardinality="0..1" interface=
"ucd.osgi.robotics.sensors.Laser"
name="Laser" policy="dynamic"/>
<reference cardinality="1" interface=
"ucd.osgi.robotics.sensors.Battery"
name="Battery" policy="static"/>
<reference cardinality="1" interface=
"ucd.osgi.robotics.actuator.Driver"
name="Driver" policy="static" />
<reference cardinality="1" interface=
"ucd.osgi.robotics.data.Location"
name="Location" policy="static" />
</scr:component>
The component requires (see the reference XML
elements) the ability to: (i) receive laser data, in order
to avoid obstacles along its path, (ii) receive position
updates which report the current location of the robot,
(iii) send control velocities to drive the robot’s plat-
form, and (iv) check the energy level of the robot’s
batteries (as its pre-condition), in order to make sure
that the laser is activated only when the battery level is
deemed sufficient to last until the robot achieves the
target destination. Laser data, sonar data, location,
robot’s driving system, and battery’s energy data can
be accessed, respectively, via the Laser, Sonar, Lo-
calization, Driver, and Battery components, as shown
in Figure 2. Of these components, only the Laser
and the Sonar components must be initialized on-
demand, while all of the other components are always
active. As such, the XML definition of the Naviga-
tionViaLaser component plan specifies that the com-
ponent plan can be instantiated even if the reference
to the Laser is not resolved (the Laser reference is
declared dynamic in the XML). This enables Self-
OSGi to instantiate the NavigationViaLaser compo-
nent without loading the laser driver, in order to check
if there is sufficient energy for it to work should it be
activated.
The following is the first part of the implementa-
tion of the BeAtLocation() service goal in the Navi-
gateViaLaser component. The implementation loads
the battery service goal and raises an exception if the
remaining energy is not sufficient to complete the re-
quested service goal, before subscribing to the laser
data (and thus triggering the activation of the laser
driver) and start controlling the robot.
class NavigateWithLaserImpl
implements BeAtLocation {
...
void beAtLocation(int x, int y) {
..
energyNeeded = estimateEnergy(
location.getX(), location.getY(),
x, y);
if (battery.getEnergyLeft()<energyNeeded)
throw Exception("Not enough energy!");
// load the laser
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
207
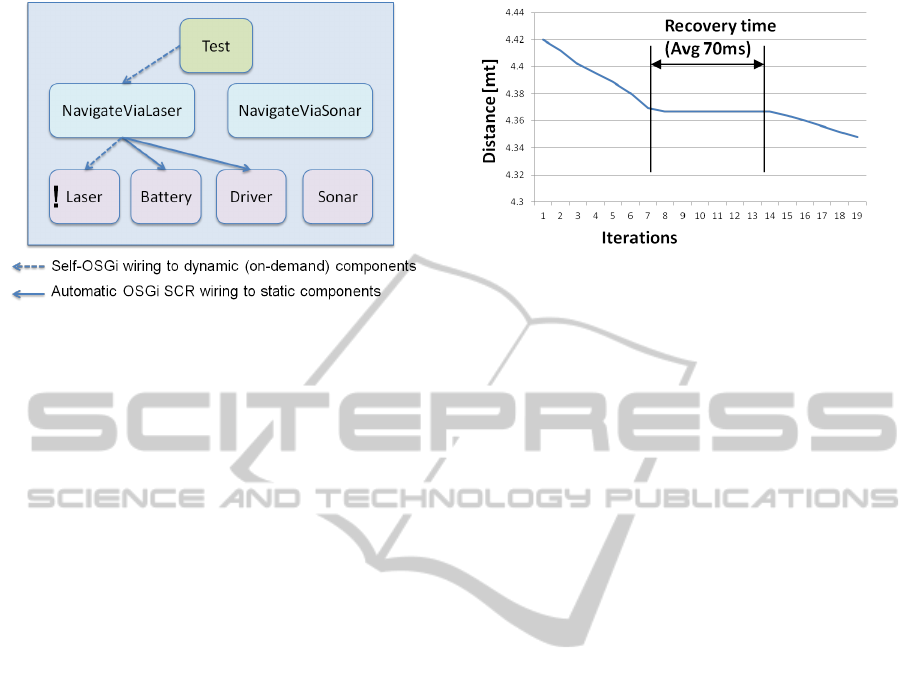
Figure 2: Part of the architecture of the robot system used
for the tests described in the text. The figure depicts the
wiring of the system before the failure of the Laser com-
ponent. After the failure, Self-OSGi kept carrying out the
test by using the NavigateViaSonar component after wiring
it with the Sonar and the Driver component.
g1 = (Laser)
serviceResolution.postServiceRequest
(Laser.class.getName(), null);
g1.subscribeLaserData();
// drive the robot
...
Based on these instructions, Self-OSGi will pur-
sue both the RecognizeObject and the BeAtLocation
service goals in parallel and take care to instantiate the
component plans that are most appropriate to the cur-
rent situatios. For instance, Self-OSGi will consider
the NavigateViaLaser component plan only when the
robot has sufficient energy left to bring the robot to
its intended destination. In addition, in the case that
the battery level will still fall below the threshold and
the laser stops functioning while NavigateViaLaser is
active, Self-OSGi will automatically replace the Nav-
igateViaLaser with the NavigateViaSonar component
plan.
The real robot system does not really benefit
from the speed of the dynamic service selection and
replacement performed by Self-OSGi, as the robot
needs time to initialize both the laser driver and the
sonar driver.
Figure 3 shows the result of a fault-tolerance test
run performed on a simulated version of the robot sys-
tem depicted in Figure 2, where simulated laser and
sonar components had no initialization latency, and
with a simulated robot driving system with infinite
accelleration. The testing environment consisted of a
Pentium dual core at 2.40 GHz with 8GB of SDRAM,
with the Sun J2SE 6.0 platform compliant JVM and
running the Linux 2.6.24 kernel. The test simulated
a failure in the Laser component after the robot’s bat-
Figure 3: An extract from the results of the fault-tolerance
test described in the text. X Axis - number of control it-
erations (in average one every 10 [ms]). Y Axis - distance
from target destination [mt]. The robot stopped at iteration
#7 when the the laser stopped working for the time Self-
OSGi took to replace the laser with the sonar-based MoveTo
behaviour.
tery level dropped below the minimum level neces-
sary to support the correct functioning of both the
laser and the robot’s driving platform. As soon as the
NavigateWithLaser component plan failed to receive
laser updates, it raised an exception that was captured
by the Self-OSGi GoalProxy, which then triggered the
selection of an alternative component plan to com-
plete the GoalBeAtLocation goal. This resulted in
the activation of a NavigateViaSonar component plan
(driving the robot at lower velocity), and the subse-
quent activation of the Sonar component. Over 10
runs, the system was able to recover from failure with
an average of 72 ms. For comparison, a similar dy-
namic service replacement performed over the Java
Beans component framework and co-ordinated by a
standard BDI agent toolkit took an average of 312ms
(M. Dragone and O’Hare, 2009a).
Finally, Figure 5 shows the execution times ob-
tained in experiments performed executing the root
goal of the goal/plan tree depicted in Figure 4. Three
possible component plan options existed to achieve
the root goal while each of those options required
the execution of two services, each with three pos-
sible implementations. In order to demonstrate the
Self-OSGi’s ability to measure and take into account
the execution time of service goals, each compo-
nent plan was programmed to require a different CPU
time while the Self-OSGi PlanSelector component
was programmed to assign greater priorities to pre-
viously unexplored plan options. The figure demon-
strates how, when Self-OSGi was repeatedly asked to
achieve the root goal, it automatically tried new com-
ponent plan implementations at each iteration, ulti-
mately converging on the best policy to achieve the
root goal in the shortest time.
With the same setup, the overhead imposed by the
ICAART 2012 - International Conference on Agents and Artificial Intelligence
208
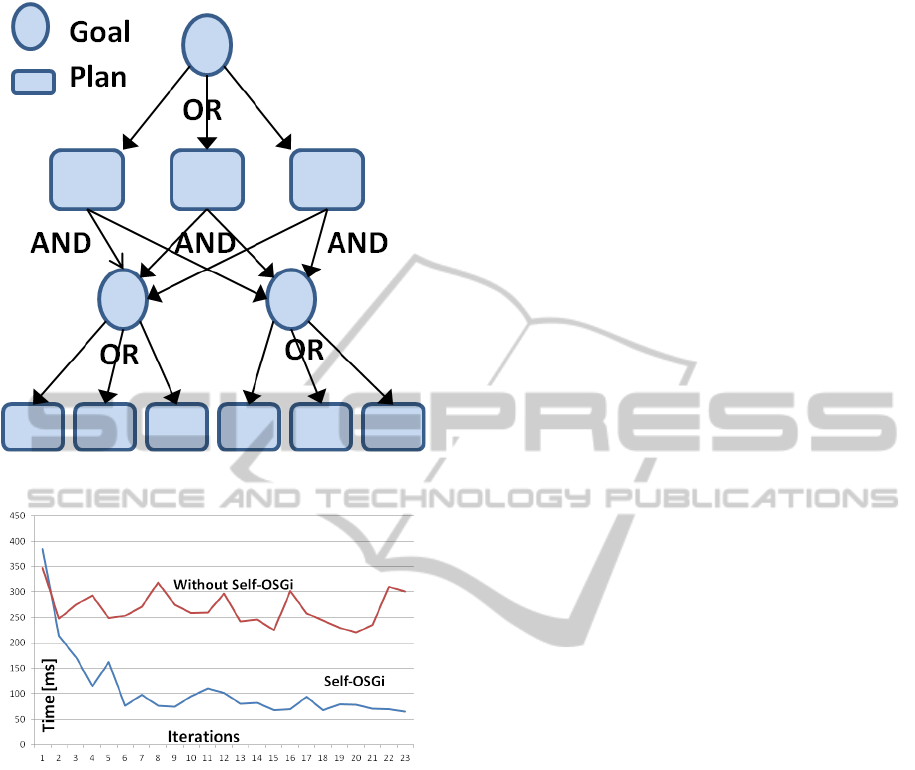
Figure 4: Structure of the test program.
Figure 5: Service selection performance.
Self-OSGi service management (performance mea-
surement and proxy mechanisms) was measured by
comparing the time needed to achieve the root service
goal with and without the installation of a GoalProxy.
The average time added by the service management
to each service goal was 0.15 milliseconds.
8 CONCLUSIONS AND FUTURE
WORK
This paper has examined component, service and
agent concepts, and has illustrated the design and the
implementation of the Self-OSGi framework for the
construction of systems with Self-* properties. Self-
OSGi is built over OSGi technology by leveraging
previously unexploited similarities between compo-
nent & service and the BDI agent model.
Compared to similar CBSE initatives, such as the
A-OSGi framework reviewed in Section 3.2, Self-
OSGi provides re-usable, lightweight, modular end
extensible adaptation mechanisms at component-level
granularity that are also tightly integrated with the
OSGi Declarative Service framework. Self-OSGi can
be used to drive the selection of services, control
the on-demand instantiation of the components imple-
menting them, and monitor their performance to drive
their future selection and to recover from failure. In
contrast, A-OSGi can be used to control and moni-
tor entire bundles, but does not offer any mechanism
to discern the performance among the single compo-
nents and services inside the bundle or to instantiate
them on-demand.
In addition, the association with the BDI model
allows Self-OSGi to leverage well-defined adaptation
policies and results from BDI-related research.
Compared to existing AOSE/CBSE integration
approaches, such as the SoSAA and the AC frame-
work reviewed in Section 4, Self-OSGi provides an
highly modular realization of the BDI agent model,
which is grounded in the mechanisms offered by a
mainstream component & service technology. This
results in low performance and footprint overheads
and fast system’s adaptation, as shown in Section 7.
Noticeably, existing agent platforms, such as JADE,
have already been made compatible with the OSGi
framework. However, this is usually done by encap-
sulating the entire agent platform into a single, mono-
lithic OSGi bundle. Such an approach does not ben-
efit of the increased modularity enabled by the OSGi
framework.
In contrast, one of the goal of the Self-OSGi
framework is to evolve into a modular agent plat-
form. To this end, the simulated robot system and
the service-selection benchmark test will be released
as open source. An ACL bundle will also be realesed
to provide FIPA-compliant ACL interoperability with
existing agent toolkits.
Future work with Self-OSGi will seek to adapt
agent/planning integration and agent learning tech-
niques to tackle some of the main limitations of adap-
tive component & service frameworks, such as their
lack of look-ahead and logical inference capabilities
and their reliance on hard-coded pre-conditions of
component plans.
The other direction to this work is the evaluation
of the usability of Self-OSGi in a range of application
domains in need of Self-* sofware architectures, in-
cluding the control and monitoring of Wireless Sensor
Network (WSNs), Ambient Assisted Living (AAL),
and home automation systems.
COMPONENT & SERVICE-BASED AGENT SYSTEMS: SELF-OSGI
209

ACKNOWLEDGEMENTS
This work has been partially supported by the EU
FP7 RUBICON project (contract n. 269914) and
by Science Foundation Ireland (SFI) under grant
07/CE/I1147.
REFERENCES
Alexander Pokahr, Lars Braubach, W. L. (2005). A goal de-
liberation strategy for bdi agent systems. In MATES-
2005. Springer-Verlag.
D. Kinny, M. G. and Rao, A. (1996). A methodology and
modeling technique for systems of bdi agents. In Proc.
Of 7th European Workshop on Modelling Autonomous
Agents in Multi-Agent Worlds, LNAI1038. Springer-
Verlag.
Georgeff, M. and Lansky, A. (1985). A system for rea-
soning in dynamic domains: Fault diagnosis on the
space shuttle. Technical Note 375, Artificial Intelli-
gence Center, SRI Internationa.
Humberto Cervantes, R. S. H. (2003). Automating ser-
vice dependency management in a service-oriented
component model. In In Proceedings of the Sixth
Component-Based Software Engineering Workshop.
J. Ferreira, J. L. and Rodrigues, L. (2009). A-osgi: A frame-
work to support the construction of autonomic osgi-
based applications. Technical Report RT/33/2009,
May 2009.
Kim, H.-K. (2005). A component-based approach for in-
tegrating mobile agents into the existing web infras-
tructure. In Third ACIS International Conference on
Software Engineering Research, Management and Ap-
plications.
Lars Braubach, A. P. (2010). Addressing challenges of dis-
tributed systems using active components. In In Pro-
ceedings of 4th International Symposium on Intelli-
gent Distributed Computing.
M. Amor, L. F. and Troya, J. (2003). Putting together web
services and compositional software agents. In ICWE
2003, LNCS 2722.
M. Dragone, R. Collier, D. L. and O’Hare, G. (2009a). Prac-
tical development of hybrid intelligent agent systems
with sosaa. In In Proceedings of the 20th Irish Confer-
ence on Artificial Intelligence and Cognitive Science
(AICS 2009) Dublin Ireland.
M. Dragone, D. Lillis, R. C. and O’Hare, G. (2009b). Prac-
tical development of hybrid intelligent agent systems
with sosaa. In Proceedings of the 20th Irish Confer-
ence on Artificial Intelligence and Cognitive Science,
Dublin, Ireland.
OSGi (2011). Open Service Gateway Initiative (OSGi)
http://www.osgi.org/Main/HomePage [Accessed Oc-
tober 2011].
Rao, A. and Georgeff, M. (1992). An abstract architec-
ture for rational agents. In In Principles of Knowl-
edge Representation and Reasoning: Proceedings of
the Third International Conference KR.
T. M. Behrens, J. D. and Hindriks, K. V. (2009). Towards
an environment interface standard for agent-oriented
programming (a pro-posal for an interface implemen-
tation). In Technical report, Clausthal University.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
210
