
ViPS
An Intelligent Tutoring System for Exploring and Learning Physics through
Simple Machines
Lakshman S. Myneni and N. Hari Narayanan
Intelligent & Interactive Systems Research Laboratory, Computer Science and Software Engineering Dept.
Auburn University, Auburn, AL 36849, U.S.A.
Keywords: Intelligent Tutoring System, Learning, Misconceptions, Physics, Simulation.
Abstract: Students tend to retain naive understandings of concepts such as energy and force even after completing
physics lessons in science classes. We developed a learning environment called the Virtual Physics System
(ViPS) to help students master these concepts in the context of pulleys, a class of simple machines that are
difficult to construct and experiment with in the real world. Several features make ViPS unique: it combines
simulation and tutoring, it customizes tutoring to address common misconceptions and it employs a peda-
gogical strategy that identifies student misconceptions and guides students in solving problems through vir-
tual experimentation. This paper describes the ViPS system and studies in which we evaluated its efficacy.
Our results indicate that ViPS is effective in helping students learn and overcome their misconceptions.
1 INTRODUCTION
Computers have been extensively used in education
since the sixties (Martin and Mitrovic, 2001).
Teachers and students use computers in all aspects
of education such as researching, organizing infor-
mation, and doing or grading homework. At the
present time, it is hard to imagine a modern educa-
tion without computers. The use of computers can be
beneficial for teachers and learners. Intelligent Tu-
toring Systems (ITS) exemplify this benefit, by
tracking a student’s progress and providing tailored
feedback and hints along the way. By collecting
information on a particular student’s performance
and modelling that student’s progress, an ITS can
make inferences about a student’s strengths and
weaknesses, and can suggest additional work. This
paper presents the design and evaluation of an intel-
ligent simulation and tutoring system called the Vir-
tual Physics System (ViPS) for exploring and learn-
ing physics concepts within the context of a particu-
lar class of simple machines.
Our research is part of a large multi-university
project to investigate the teaching and learning of
physics concepts in middle schools. We have seen
that it is difficult for a teacher to track the progress
of students individually in a class with many stu-
dents. A teacher may not always know who is hav-
ing difficulty during group work in the class or labo-
ratory, may not be able to tell why a student is hav-
ing difficulties, and may not have enough time to
look into every student’s needs in a large class. A
tutoring system coupled with an experimentation
and simulation environment, on the other hand, will
be able to track each individual student’s problem
solving activities, such as the construction of a sim-
ple machine, the running of it, and solving problems
based on such simulations, and provide individual-
ized feedback. This is the primary motivation behind
the development of ViPS. One goal of middle school
science instruction is to inculcate deep knowledge of
fundamental physics concepts such as energy, force,
work and mechanical advantage in students through
hands-on work with simple machines like inclined
planes, levers and pulleys. However, learning about
simple machines, especially pulley systems, is in
itself a challenging task for many students. In addi-
tion, teachers face the difficulty of helping students
abstract what is learned in the context of hands-on
work to a more general understanding of physics
concepts. Several design and project-based ap-
proaches have integrated software and innovative
curricula to address this. Though students have ex-
hibited better understanding following such inter-
ventions, there is still room for improvement as mis-
73
S. Myneni L. and Narayanan N..
ViPS - An Intelligent Tutoring System for Exploring and Learning Physics through Simple Machines.
DOI: 10.5220/0003924700730082
In Proceedings of the 4th International Conference on Computer Supported Education (CSEDU-2012), pages 73-82
ISBN: 978-989-8565-06-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

conceptions regarding important physics concepts
persist often into college years.
We addressed this problem through a two-
pronged approach: (1) by making it easier for stu-
dents to construct, simulate and experiment with
simple machines in a virtual environment, and (2) by
integrating a tutoring component with the simulation
component. We chose one class of simple machines,
pulley systems, as the domain for the tutoring and
simulation environment because students generally
find pulleys harder to understand than simpler ma-
chines like inclined planes. Another reason for this
choice is that complex pulley setups (e.g., those
involving compound pulleys with multiple grooves
or many movable pulleys) are so difficult to cor-
rectly build and experiment with in the real world
within the limited class time available that teachers
tend to limit hands-on activities to very simple set-
ups only. Furthermore, there are experimental setups
such as those with no friction that are impossible to
construct and test in the real world. The rest of this
paper is structured as follows. Section 2 discusses
research literature that forms the background of our
work. Section 3 describes the architecture of the
simulation and tutoring system ViPS. Section 4 pre-
sents empirical evidence for the efficacy of ViPS
and section 5 concludes the paper.
2 BACKGROUND
Tutoring is an instructional activity known to im-
prove student learning. For instance, Reiser, Ander-
son and Farrell (1985) reported that students work-
ing with private tutors could learn material four
times faster than students who attended traditional
classroom lectures, studied textbooks and worked on
homework alone. When a human tutor is not availa-
ble, the next best option maybe an Intelligent Tutor-
ing System (ITS). An ITS is a computer-based in-
structional system that has knowledge bases for
instructional content and teaching strategies. It at-
tempts to acquire and use knowledge about a stu-
dent‘s level of mastery of topics in order to dynami-
cally adapt instruction. Anderson & Skwarecki
(1986) reported that an ITS is a cost-effective means
of one-on-one tutoring to provide novices with the
individualized attention needed to overcome learn-
ing difficulties. ITS have been built for various do-
mains such as mathematics, medicine, engineering,
public services, computer science, etc. (Ritter el al.,
2007). The potential of ITS for helping students
learn is well recognized.
Another learning activity that is beneficial is
problem solving through experimentation. It is a
hands-on activity that involves designing and build-
ing an experimental setup, letting it perform its func-
tion and collecting data from it in order to solve a
problem, to better understand the underlying phe-
nomena or to test a scientific hypothesis. Computer
modelling and simulation often take the place of
physical manipulation in this learning activity. Many
researchers have described the affordances and limi-
tations of problem solving using physical manipula-
tives and computer simulations in science education
research (de Jong and Van Joolingen, 1998);
(Finkelstein, et al., 2005); (Triona, et al., 2005).
Zacharia and Anderson (2003) investigated the ef-
fects of interactive computer-based simulations,
presented prior to inquiry-based laboratory experi-
ments, on students’ conceptual understanding of
mechanics. They found that the use of simulations
improved students’ ability to generate predictions
and explanations of the phenomena in the experi-
ments. Triona and colleagues (2005) investigated
how physical and virtual manipulatives affected
student learning about mousetrap cars. Students used
either physical or virtual manipulatives to design
their cars. The physical and virtual treatments
showed the same effectiveness in helping students
design cars. Finkelstein and co-workers (2005)
looked at how students learned about electrical cir-
cuits differently with virtual or physical manipula-
tives. The simulations used by the students were
similar to the physical materials, except that the
simulations showed electron flow within the circuit,
which the physical materials could not. They re-
ported that the students who had used virtual ma-
nipulatives, i.e. the simulations, scored better on an
exam and were able to build physical circuits more
quickly than students who used physical manipula-
tives. Zacharia et al., (2008) looked at physical and
virtual manipulatives in the context of heat and tem-
perature. One group of students used physical ma-
nipulatives, while other group of student used physi-
cal manipulatives followed by virtual ones. Students
who worked with physical followed by virtual ma-
nipulatives performed better on a conceptual test
than students who only used the physical manipula-
tives. The authors’ conclusion was that one reason
for the addition of simulation increasing student
learning was that simulations could be manipulated
more quickly than physical setups.
Our research combines these two strands of tu-
toring and experimentation by designing and testing
a system, ViPS, that has both intelligent tutoring and
virtual experimentation capabilities. ViPS is able to
provide guided tutoring to a student as he or she
CSEDU2012-4thInternationalConferenceonComputerSupportedEducation
74

solves physics problems involving pulleys. ViPS
also allows the student to construct, run and collect
data from complex as well as simple pulley setups.
The interfaces of ViPS have been designed in
congruence with the Cognitive Theory of Multime-
dia Learning (Mayer, 2009), and its tutoring em-
ploys the instructional technique of Coached Prob-
lem Solving (Conati et al., 1997). Furthermore, ViPS
is designed to detect and help address the following
misconceptions regarding pulleys that students
commonly exhibit (see Table 1).
Table 1: Different misconceptions tutored by ViPS.
Definition
Misconception 1
The more pulleys there are in a setup, the
easier it is to pull to lift a load.
Misconception 2
The longer the string in a pulley setup, the
easier it is to pull to lift a load.
Misconception 3
Pulling upwards is harder than pulling
downwards.
Misconception 4
Having more pulleys in a pulley setup
reduces the amount of work.
Misconception 5
Size (radius) of pulleys in a pulley setup
affects the amount of work.
Misconception 6
Improper understanding of force and
work.
ViPS detects which of these misconceptions a
student has by asking the student to solve a set of
problems at the beginning. This involves answering
questions about pulley setups after constructing and
running them in the simulation environment. Based
on this, ViPS constructs a student model. This
model, which is continually updated throughout the
tutoring session, is used for generating additional
problems for the student to solve, and for providing
hints and other kinds of feedback based on the stu-
dents’ knowledge state. As far as we know, ViPS is
the first system to integrate a virtual experimentation
environment with a tutoring component specifically
tailored to address student misconceptions.
3 DESCRIPTION OF VIPS
ViPS provides a student with an interactive simula-
tion and tutoring environment in which pulley setups
can be created and simulated. Components required
for pulley setups can be created and manipulated
using a drag and drop interface. Students are asked
by ViPS to solve problems in this environment by
creating and running pulley simulations. As a stu-
dent is working towards a solution, the system keeps
track of his or her actions and provides feedback to
help the student make progress.
The architecture of ViPS, implemented in Java,
is shown in Figure 1. It consists of a graphical user
interface that manages interaction with students, a
simulation module that creates and simulates the
pulley setups built by students, a feedback module
that generates appropriate messages for the student,
a knowledge evaluator that evaluates the knowledge
of the student, a tutor module that tutors the student
for misconceptions, a student model that includes
the history of student interactions and various meas-
ures of student performance, a domain knowledge
model that represents domain knowledge, a database
of problems, and a procedural knowledge model that
represents student solution paths within individual
problems. We briefly describe these components
below (more details may be found in Myneni, 2011).
3.1 Graphical User Interface
The graphical user interface is responsible for all the
interactions with the student. This interface is di-
vided into two main parts: a tabbed work area for
creating pulley setups and solving problems, and an
object pallet for selecting the components required
to create a pulley setup. A snapshot of the interface
can be seen in Figure 2. Using this interface, stu-
dents can create a pulley setup by dragging the re-
quired components from the object pallet on to the
work area and clicking on the thread button. Stu-
dents can also interactively manipulate various pa-
rameters of the components, like the size of a pulley,
value of the load etc. A problem is given to the stu-
dent in the form of textual and pictorial representa-
tions (see Figure 3). The student is asked to solve the
problem by creating the setups required to answer
the question, running the simulations and comparing
the simulation outputs of the setups created. The
problems in ViPS were designed and checked by
experienced physics educators. Currently, ViPS
contains ten problems per misconception (60 in to-
tal, with more to be added in future) in its database.
A web-based interface is available to teachers and
experts to add or modify the problems. The reason
ViPS poses problems to a student is to first identify
his/her misconceptions and then to address them
through coached problem solving.
3.2 Knowledge Evaluator
When a student first initiates ViPS, a pre knowledge
test, in the form of problems to solve (see Figure 2
for an example), is given. Once the student finishes
the test, his/her answers are evaluated by the knowl-
edge evaluator to estimate the student’s initial
ViPS-AnIntelligentTutoringSystemforExploringandLearningPhysicsthroughSimpleMachines
75
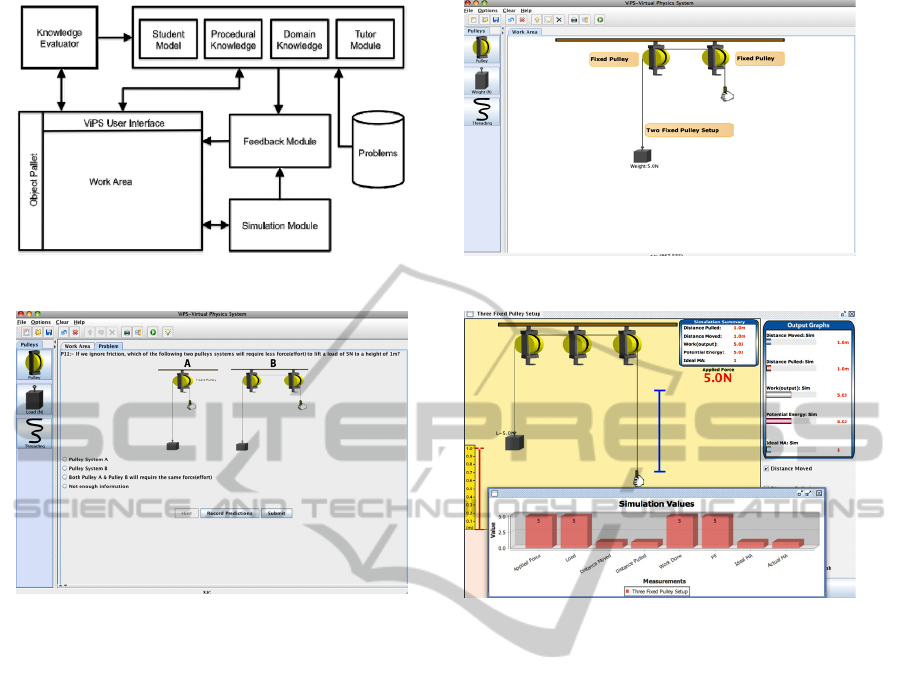
Figure 1: Architecture of ViPS. Figure 2: ViPS work area.
Figure 3: ViPS problem pane. Figure 4: ViPS simulation window.
knowledge level and to identify the misconceptions
he/she might have so that a subsequent sequence of
problems can be generated for the student to solve in
a tutoring session. Similarly, a post knowledge test
is given to the student after the completion of a tu-
toring session, and the answers are evaluated by the
knowledge evaluator to determine the student’s post
knowledge level and the status of each misconcep-
tion identified from the pre-test.
After helping students to clear a particular mis-
conception that the system is currently addressing
through problem solving or tutoring, a follow up test
is given in order to estimate the knowledge acquired
by the students from problem solving or tutoring.
After the students exits the tutor module, a post
knowledge test is also given to evaluate the status of
all misconceptions detected from the pretest. Results
from the post knowledge test are used to determine
whether a student retained the acquired knowledge
through the end of the session. The knowledge eval-
uator is responsible for evaluating the students’
knowledge retention.
3.3 Simulation Module
The simulation module is responsible for creating
and simulating the setups created by the student. In
particular, it provides a platform for running simula-
tions of setups that are difficult or impossible to
create in the physical world, such as running a simu-
lation with zero friction or running a simulation with
quintuple pulleys. The outputs generated by the
simulation include graphs and real time values of
variables like force, work done, potential energy,
friction and mechanical advantage (see Figure 4).
The student uses the simulation module to run the
different pulley setups he/she creates during problem
solving. The domain knowledge of the simulation
model regarding possible or valid pulley setups is
represented in the form of a Bayesian Belief Net-
work. This network is used by ViPS to 1) find all
possible setups that can be created using components
that an individual student has created on the work
area, 2) find components for creating a valid setup
that are missing from the work area, and 3) generate
dynamic hints regarding pulley setups based on stu-
dent actions. ViPS generates all possible setups that
the student may possibly have in mind, based on the
components that the student created in the work
area. This setup inference process is illustrated by
the example in Figure 5. Figure 5(a) shows the part
of the network corresponding to a single compound
CSEDU2012-4thInternationalConferenceonComputerSupportedEducation
76
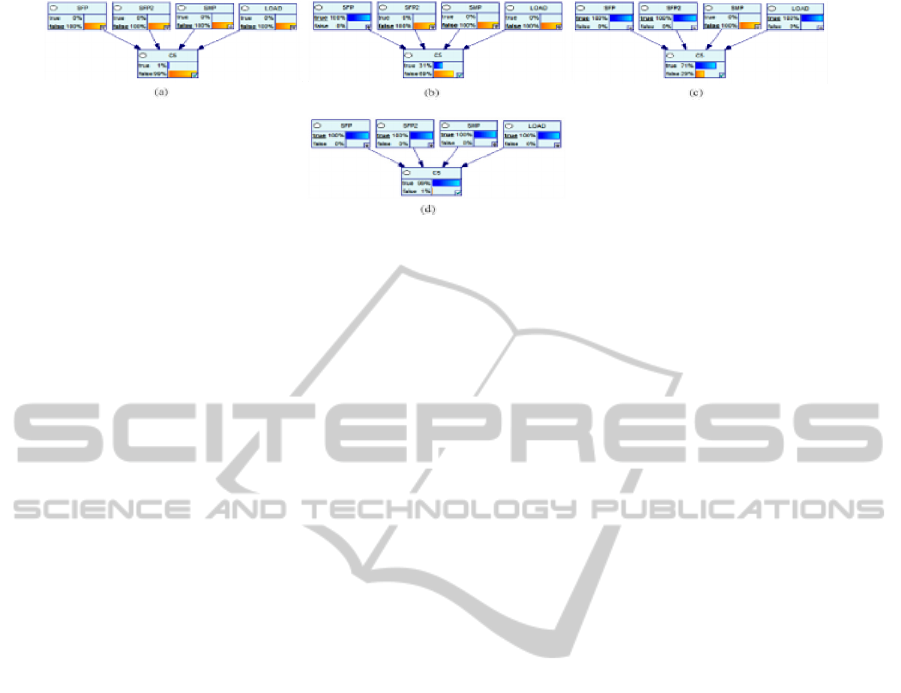
Figure 5: Setup inference using Bayesian Network.
pulley setup with extra pulley (C5). Initially the
probability of this setup is zero or false (indicated by
the orange bar in the figure). As the student creates a
fixed pulley (SFP) in the work area, this evidence
updates the network as shown in Figure 5(b). The
probability of SFP is updated to 1 or true (indicated
by the blue bar in the SFP box), and this results in an
increase of the probability of C5. There is a further
increase in the probability of the setup C5 when the
student now adds a second pulley and a load (proba-
bility increases from 31% to 71%, indicated by the
length of the blue bar in the C5 box) (Figure 5(c)).
The probability for C5 increases to 99% upon the
addition of a movable pulley to the existing setup
(Figure 5(d)). This example shows how ViPS infers
the intended setup if all the required components for
that particular setup are present in the work area.
It is possible that the components assembled by a
student do not lead to a unique pulley setup, and
instead can be used to produce several possible set-
ups. If this happens, ViPS infers and displays a list
of possible setups based on the probabilities of creat-
ing each setup as determined by the Bayesian net-
work, and ranked by an algorithm that we devel-
oped. This algorithm uses four attributes to rank
order possible setups: (1) the number of components
needed by a setup that are missing from the work
area; (2) the number of grooves in each pulley in the
setup; (3) the total number of components in the
setup; and (4) the number of times this setup was
created by the student previously. The rank of each
setup is determined based on these attributes. For
example, a possible setup with fewer number of
components missing from the work area will have a
higher rank than a setup with more missing compo-
nents. In other words, higher the number of missing
components, the lower the rank. Similarly, the algo-
rithm ranks simpler setups containing fewer number
of components and pulleys with fewer grooves
higher than more complex setups, and also ranks
setups that the student had previously created higher.
Once the rank ordering is complete, the system dis-
plays the top five setups to the student. Then the
student is asked about which of these setups most
closely match his or her intention. Based on the
students’ selection, the simulation module generates
dynamic hints to guide the student towards the com-
pletion of the intended setup in the work area.
3.4 Student Model
The student model includes information about each
individual student’s interactions with the system, pre
and post knowledge levels and misconceptions (as
identified from the tests), and the past problem solv-
ing behavior of the student. A Bayesian inference
network is used to update the student model
(Mislevy and Gitomer, 1996); (Conati et al., 1997).
A classical approach on how people forget is
based on research conducted by Herman Ebbing-
haus, and appears in reprinted form in (Ebbinghaus,
1998). Ebbinghaus’ empirical research led him to
create a mathematical formula that calculates an
approximation of how much may be remembered by
an individual sometime after he or she stops a learn-
ing activity (equation 1).
b = 100 *k/ (log t)
c
+ k (1)
Where:
• t is the time in minutes counting from one minute
before the end of the learning activity,
• b is an estimate of the amount remembered from
the learning activity after time t, and
• c and k are two constants with predetermined
values k=1.84 and c=1.25.
In the student model of ViPS, the Ebbinghaus calcu-
lations have been used as the basis for finding out
how much tutoring content or content learned from
problem solving is retained by the student. After
solving problems related to each misconception or
after tutoring the student for a particular misconcep-
tion, a follow-up test with three questions is given to
the student and based on the responses, the students’
initial memory state is calculated using equation 2.
ViPS-AnIntelligentTutoringSystemforExploringandLearningPhysicsthroughSimpleMachines
77

X%= b/100 * RQ (2)
Here b is Ebbinghaus’ power function result calcu-
lated using equation 1 with t=0. However, equation
2 has a new factor, called the Response Quality
(RQ). This is used to individualize equation 1 to the
particular circumstances of each student by taking
into account his or her answers to the follow-up
questions. RQ is the number of correct responses to
the follow-up questions asked after the completion
of problem solving or tutoring for a particular mis-
conception.
Once the tutoring for all the misconceptions a
student might have is completed, or after all the
problems have been solved, the student is given a
post knowledge test that is used to estimate the sta-
tus of each misconception detected by ViPS from
the pre knowledge test. This test is also used to cal-
culate the knowledge retained by the student, using
equations 1 and 2. The difference between the initial
(immediately after a problem solving or tutoring
session for a misconception) and final (after all mis-
conceptions have been addressed) retention levels
gives us an estimate of content that is not retained by
the student. This information is used by the system
to decide whether to re-tutor the student.
3.5 Tutor Module
The Tutor module of ViPS is based on the Cognitive
Theory of Multimedia Learning (Mayer, 2009) and
Vygotsky’s theory of learning. The tutor module is
responsible for overseeing the process of tutoring the
student for the misconceptions he/she might have,
and it is also responsible for overseeing the process
of problem solving by using the information gener-
ated by the student model to select and present ap-
propriate problems. It uses a decision algorithm to
determine the level of coaching to provide, and in-
teracts with the feedback module to generate appro-
priate hints. The design of tutoring content, text and
pictures, adhered to the principles stated in the Cog-
nitive Theory of Multimedia Learning, and the feed-
back generated by the tutor module is based on the
Zone of Proximal Development (ZPD) component
of Vygotsky’s theory of learning.
The tutor’s decision to tutor or not depends on
the student’s response to the problems he or she has
been given to solve. For every problem, the student
has to enter his prediction (P), actual answer (A) and
answer to a follow-up (FU) question. Based on these
answers (correct answer: T and wrong answer: F)
the problem is classified into one of the categories as
shown in Table 2.
Table 2: Students’ problem solving classification truth
table.
(P) (A) (FU) Classification
T T T R+
T T F R-
T F T W+
T F F W
F T T R-
F T F R
F F T W+
F F F W-
The problem is classified as successfully solved
(true), if the outcomes are R+, R-, and R or else it is
classified as incorrectly solved (false) (W+, W-, W).
The tutor module presents two or three problems per
misconception to determine whether a student has
that misconception or not. It uses these problem
outcomes to decide whether to tutor the student for
the current misconception or move on to evaluate
the next misconception using another set of three
problems. Table 3 shows the tutor action truth table.
For example, if the student solves the first two prob-
lems correctly, he or she is determined not to have
the corresponding misconception, so the tutor will
move on to the next misconception (Table 3, row 1).
If the student solves the first problem correctly but
errs in the second one, the tutor will present a third
problem and depending on its outcome will either
move to the next misconception (Table 3, row 2) or
start tutoring actions to clear the current misconcep-
tion (Table 3, row 3). Tables 2 and 3 together illus-
trate the tutor module decision tree. The student is
given up to four attempts to solve a given problem.
Figure 6 shows the flowchart of the tutoring process.
3.6 Feedback Module
The feedback module is responsible for generating
feedback messages for the students. This module
produces the following four types of feedback:
1. The student creates a setup by dragging compo-
nents onto the work area and clicking the thread
button. If any constraint violations that can lead to
impossible or invalid pulley setups are detected,
ViPS generates a feedback known as setup feedback.
2. The student creates a set of valid components in
the work area, but has no idea of what to do next,
i.e., how to thread a string through the pulleys to
complete the setup construction. In these circum-
stances, ViPS can deliver feedback about the next
moves the student has to make. This is known as
threading hint feedback.
CSEDU2012-4thInternationalConferenceonComputerSupportedEducation
78
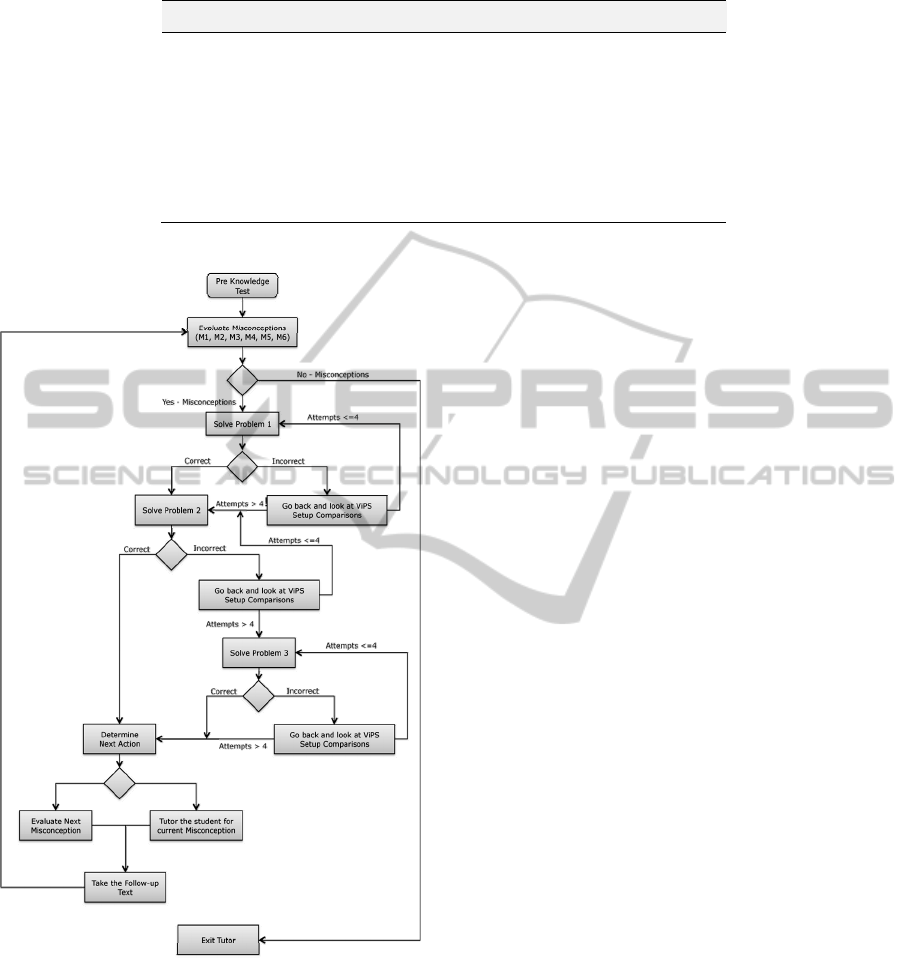
Table 3: Tutor action truth table.
Problem 1 Problem 2 Problem 3 Tutor Action
T(R+, R-, R) T(R+, R-, R) N/A Next Misc
T(R+, R-, R) F(W+,W-,W) T(R+, R-, R) Next Misc
T(R+, R-, R) F(W+,W-,W) F(W+,W-,W) Tutor Action
F(W+,W-,W) T(R+, R-, R) T(R+, R-, R) Next Misc
F(W+,W-,W) T(R+, R-, R) F(W+,W-,W) Tutor Action
F(W+,W-,W) F(W+,W-,W) N/A Tutor Action
Figure 6: ViPS tutoring process flowchart.
3. After creating and simulating one or more setups,
the student submits his/her problem solutions. The
system evaluates this and generates messages known
as problem feedback.
4. ViPS can coach students when needed during the
process of problem solving, and this is known as
problem hint feedback.
4 EVALUATION OF VIPS
We conducted evaluation studies of ViPS at one
university with 12 engineering majors enrolled in
their first physics course, and at another university
with 210 pre-service elementary teachers enrolled in
a physics course. Since ViPS is intended for even-
tual middle school use, our iterative design approach
to ViPS involves the following stages: (1) initial
design; (2) usability test of the initial design with the
target middle school population; (3) redesign; (4)
evaluation with more advanced (i.e. college) stu-
dents regarding the usefulness and usability of the
system; (5) redesign; and (6) deployment in middle
schools for final evaluations. Myneni (2011) pro-
vides details of the initial design (stage 1) and us-
ability testing with middle school students (stage 2),
which showed that the interface was usable, but also
revealed problem areas that were then corrected in
redesign (stage 3). Myneni (2011) also describes the
evaluation studies (stage 4). The analysis of data
generated from these studies revealed that ViPS is
effective in helping students learn and is also well
perceived by students. Below, we present just a
summary of this evaluation.
4.1 Experimental Procedure
A total of 220 students, 12 engineering majors from
one university and 208 pre-service elementary
teachers from another university, took part in the
evaluation studies. Experimental subjects with dif-
fering backgrounds were recruited so that we could
explore the extent to which ViPS would help both
students with more advanced physics knowledge
(engineering majors) and those who have less exper-
tise (elementary teachers). Twelve participants from
the first university and 50 from the second were
assigned to one experimental condition: the Virtual-
Only condition in which participants constructed
pulley systems using ViPS and solved problems
ViPS-AnIntelligentTutoringSystemforExploringandLearningPhysicsthroughSimpleMachines
79

related to misconceptions. However, data from two
participants at the first and 3 participants at the se-
cond university could not be used for analysis be-
cause of gaps in collected data. Hundred and fifty
eight participants from the second university were
randomly assigned to two experimental conditions:
(1) the Physical-Virtual condition (PV) in which
participants worked in groups of two, first with
physical pulleys and next with ViPS, to solve prob-
lems related to one misconception, and (2) the Vir-
tual-Physical condition (VP) in which participants
worked in groups of two, first with ViPS and then
with physical pulleys, to solve problems related to
the same misconception. There was no Physical-
Only condition because learning data for physical
pulleys could be obtained from the PV and VP
groups. All students answered a usability question-
naire at the end of their sessions, which was used to
assess user satisfaction with the system.
Study Procedure for Virtual-Only Condition
• Pre-Test: In a pre-test, the participants were
asked to individually answer 18 questions related to
pulley systems in ViPS in order to measure their
prior knowledge.
• Problem Solving: The participants individually
solved problems related to the misconceptions that
were identified from the pre-test, and underwent
tutoring as needed using ViPS.
• Post-Test: In a post-test, the participants were
asked to individually answer 18 questions (same
questions as pre-test, but displayed in different or-
der) related to pulley systems in ViPS in order to
measure their knowledge. ViPS used this test to
detect any remaining misconceptions.
• Usability Survey: All participants were asked to
fill out a usability survey to measure their overall
satisfaction in using ViPS.
Study Procedure for Physical-Virtual and Virtual-
Physical Conditions
• Pre-Test: In a pre-test, the participants were
asked to individually answer 18 questions related to
pulley systems on paper in order to measure their
prior knowledge.
• Group Assignment: Participants were paired and
pairs were randomly assigned to either the PV
Group or the VP Group.
• Problem Solving: Each group solved problems
related to one misconception (“the more pulleys
there are in a setup, the easier it is to pull to lift a
load”) using either actual pulleys or ViPS depending
on their assignment to the PV or VP condition.
• Mid-Test: In a mid-test, the participants were
asked to individually answer 18 questions related to
pulley systems (same questions as pre-test, but pre-
sented in different order) on paper in order to meas-
ure their knowledge after solving problems using
either actual pulleys or ViPS.
• Problem Solving: Each group then solved prob-
lems related to the same misconception using either
ViPS or actual pulleys depending on their assign-
ment to the PV or VP condition.
• Post-Test: In a post-test, all the participants were
asked to individually answer 18 questions related to
pulley systems (same questions as pre-test and mid-
test, but presented in different order) on paper in
order to measure their knowledge after solving prob-
lems using actual pulleys and then ViPS or vice
versa.
• Usability Survey: All participants were asked to
fill out a usability survey to measure their overall
satisfaction in using ViPS.
4.2 Log Analysis
The interactions between ViPS and the students have
been comprehensively logged. From these log files,
several features have been extracted and compared
using linear regression.
4.2.1 Pre-test Scores
Linear regression found a significant negative corre-
lation (see Table 4) between pre-test score and learn-
ing gain in Virtual Only, Virtual (VP), and Physical
(PV) groups. It is not surprising that these correla-
tions are strong as many of the students have low
pre-test scores.
Table 4: Correlation between pre-test score and learning
gain.
N R p Std Beta
Virtual Only 57 0.66 0.001 -0.664
Virtual (VP) 80 0.66 0.001 -0.633
Physical (PV) 78 0.62 0.001 -0.620
4.2.2 Problems Solved
Linear regression found a significant positive corre-
lation (N=57, R=0.756, R
2
=0.571, p=0.03, Standard-
ized Beta=0.792) between learning gain and number
of problems solved in the Virtual Only group. On
average, each student solved 8 problems while
working with the ViPS tutor. The other two groups
(PV and VP) were excluded from this analysis as
they solved problems related to only one misconcep-
tion.
CSEDU2012-4thInternationalConferenceonComputerSupportedEducation
80
4.2.3 Number of Simulations Created
Linear regression found a positive correlation be-
tween learning gain and number of simulations cre-
ated, but the value of p was not statistically signifi-
cant (N=57, R=0.039, R
2
=0.002, p=0.830). On aver-
age, each student created 14 simulations.
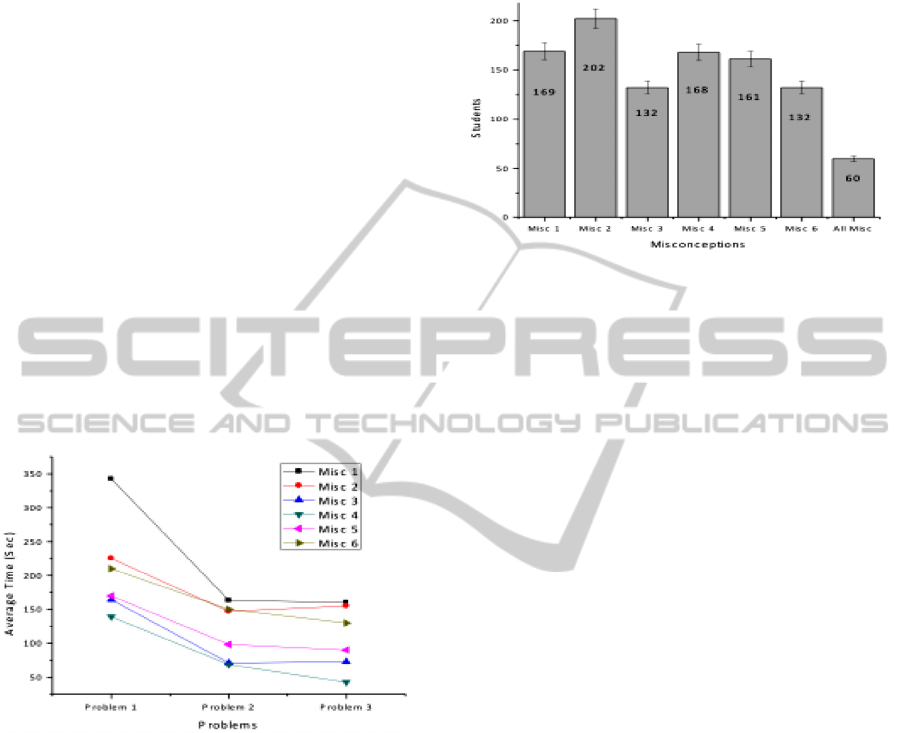
4.2.4 Problem Time
Figure 7 shows the average time taken to solve the
three problems in each misconception category (see
Table 1). Repeated measures ANOVA revealed an
overall significant difference in the average time
taken to solve the three problems while working
with ViPS (F(1,140)=9.1, p<0.02). The time re-
quired to solve a problem decreased significantly as
students moved to subsequent problems in the same
misconception category. This suggests that students
took more time to solve the first problem in a mis-
conception category as they were seeing a problem
related to that misconception for the first time, but
that they were faster at solving subsequent problems.
Figure 7: Average time taken to solve three problems in
each misconception category.
4.2.5 Misconceptions
Figure 8 shows the detected frequency of each mis-
conception. The most common misconception
among all the students who participated in the eval-
uation experiments is Misconception 2 (see Table 1)
followed by Misconception 1 and Misconception 4.
Out of all the students, 60 exhibited all the six mis-
conceptions. That such misconceptions persist in
college students is an interesting finding. A paired-
sample t-test comparing the number of misconcep-
tions identified in the pre-test and post-test in the
Virtual-Only group found a significant reduction in
number of misconceptions (t(54)=16.6, p=0.001).
On average, each student exhibited five misconcep-
tions after pre-test and two misconceptions after
post-test. The number of misconceptions decreased
significantly after working with ViPS.
Figure 8: Frequency of misconceptions.
5 CONCLUSIONS
In this paper, we presented an intelligent simulation
and tutoring system called ViPS for learning physics
concepts through exploring a class of simple ma-
chines. ViPS is innovative in several ways. First,
ViPS employs the Coached Problem Solving ap-
proach (Conati et al, 1997) to detect and effectively
tutor for common student misconceptions regarding
physics concepts exemplified in pulley systems.
ViPS is able to dynamically infer valid pulley setups
from the components that a student selects and
places on the workspace, and to adaptively generate
hints based on student actions. Second, ViPS is a
new tool for virtually experimenting with – creating,
exploring and simulating – pulley setups, which are
hard to build and manipulate in the physical world.
Third, the graphical interface of ViPS is designed
according to the Cognitive Theory of Multimedia
Learning (Mayer, 2009) in order to help students
connect abstract and difficult concepts of physics
with representations at a more tangible level. Fourth,
ViPS brings together the concepts of virtual experi-
mentation and intelligent tutoring in one platform.
Data analyses from ViPS evaluations support
these conclusions: (1) the less prior knowledge a
student has, the more he or she learns from ViPS; (2)
amount of learning is directly related to the number
of problems a student solves and the number of
simulations he or she runs; (3) the more a student
works with ViPS, the faster he or she is able to solve
problems; and (4) ViPS is able to reduce the number
of misconceptions students commonly exhibit.
One limitation of this work is that the system is
yet to be field-tested with the target population of
middle school students. An early study did show that
ViPS-AnIntelligentTutoringSystemforExploringandLearningPhysicsthroughSimpleMachines
81

middle school students found the system to be us-
able (Myneni, 2011). Results from evaluation with
college students also give us confidence that the
system will be effective in middle schools. It is in-
teresting to note that we identified an average of five
misconceptions in college students, even though
middle school curricula in physics are generally
thought to address and remedy such misconceptions.
ViPS was indeed successful in remedying many of
these misconceptions in college students. Neverthe-
less, this finding needs to be re-evaluated in middle
schools. Therefore, our future work is on fielding
ViPS in middle schools and evaluating it further.
REFERENCES
Anderson, J. R. and Skwarecki, E., (1986). The automated
tutoring of introductory computer programming.
Communications of the ACM, 29, 842-849.
Conati, C., Gertner, A., VanLehn, K. and Druzdzel, M.,
(1997). On-line student modelling for coached prob-
lem solving using Bayesian Networks. Proc. 6
th
Int’l
Conf. on User Modeling (pp. 231-242), Springer.
de Jong, T., and van Joolingen, W. R., (1998). Scientific
discovery learning with computer simulations of con-
ceptual domains. Review of Educational Research, 68,
179-202.
Ebbinghaus, H., (1998). “Classics in Psychology, 1885:
Vol. 20, Memory”, R.H. Wozniak (Ed.), Thoemmes
Press, 1998.
Finkelstein, N. D., Adams, W. K., Keller, C. J., Kohl, P.
B., Perkins, K. K. and Podolefsky, N. S., (2005).
When learning about the real world is better done vir-
tually: A study of substituting computer simulations
for laboratory equipment. Physical Review Special
Topics – Physics Education Research, 1(1), 010103.
Lewis, J. R., (1995). IBM computer usability satisfaction
questionnaires: Psychometric evaluation and instruc-
tions for use, International Journal of Human-
Computer Interaction, 7, 57-78.
Martin B. and Mitrovic A., (2001). Easing the ITS bottle-
neck with constraint-based modelling. New Zealand
Journal of Computing, 8(3), 38–47.
Mislevy, R. J. and Gitomer, D. H., (1996). The role of
probability-based inference in an intelligent tutoring
system. User-Modeling and User Adapted Interaction,
5, 253-282.
Myneni L. S., (2011). An Intelligent and Interactive Simu-
lation and Tutoring Environment for Exploring and
Learning Simple Machines. Unpublished doctoral dis-
sertation, Auburn University.
Reiser, B. J., Anderson, J. R. and Farrell, R. G., (1985).
Dynamic student modeling in an intelligent tutor for
LISP programming. Proc. Int’l Joint Conferences on
Artificial Intelligence (pp. 8-14).
Ritter, S., Anderson, J., Koedinger, K. and Corbett, A.,
(2007). The Cognitive Tutor: Applied research in
mathematics education. Psychonomics Bulletin & Re-
view, 14(2), 249-255.
Mayer, R. E., (2009). Multimedia Learning. New York:
Cambridge University Press.
Triona, L. M., Klahr, D. and Williams, C., (2005). Point or
click or building by hand: Comparing the effects of
physical vs. virtual materials on middle school stu-
dents’ ability to optimize an engineering design, Proc.
27
th
Annual Conference of the Cognitive Science Soci-
ety (pp. 2202-2205).
Zacharia, Z. and Anderson, O. R., (2003). The effects of
an interactive computer-based simulation prior to per-
forming a laboratory inquiry-based experiment on stu-
dents’ conceptual understanding of physics. American
Journal of Physics, 71(6), 618-629.
Zacharia, Z. C., Olympiou, G. and Papaevripidou, M.,
(2008). Effects of experimenting with physical and
virtual manipulatives on students' conceptual under-
standing in heat and temperature. Journal of Research
in Science Teaching, 45, 1021–1035.
CSEDU2012-4thInternationalConferenceonComputerSupportedEducation
82
