
FROM GRIDS TO CLOUD
The Pathway for Brain dMRI Cloud Services
Tarik Zakaria Benmerar and Fatima Oulebsir-Boumghar
ParIMed Team, LRPE, USTHB, BP32, El Alia, Bab-Ezzouar, Algiers, Algeria
Keywords:
Cloud Computing, Grid Computing, dMRI Brain, Cloud Services, SaaS, PaaS.
Abstract:
In this paper, we present the actual architecture of Acigna-G, our Cloud-oriented Grid Computing platform
and the ongoing deployment of a MAS algorithm for brain segmentation. Also, we discuss three important
improvements for this platform to allow the deployment of brain dMRI cloud services : HTTP/Restful oriented
computing services for the management of user’s service requests, application-level virtualization coupled
with distributed computing models, and separation of user request management and computing tasks execution
as found on actual PaaS Cloud Services. Such architecture would offer a convenient deployment and use of
brain dMRI PaaS/SaaS Cloud Services onto a computing grid.
1 INTRODUCTION
For more than a decade, Grid Computing has fueled
the scientific research by offering an access to a huge
number of federated computing ressources of differ-
ent organizations. Many experiments have been un-
dertaken, from oil industry to finance while passing
by Particles Physics and Medical Imagery, more par-
ticularly, in neuro-imagery and dMRI images process-
ing and analysis.
Neverthless, in such infrastructure the complexity
of deployment and development of grid applications
remain a present hurdle, and as pointed by Gabrielle
Allen et al. there exists a shortage of real grid users
(Allen et al., 2003). Also, as mentioned by Chris-
tian Vecchiola et al. (Vecchiola et al., 2009), some
issues are bureaucratic : as grids are shared world-
wide, a proposal should be submit by research groups
describing the type of research carried out. This
approach has lead to a competitive use of scientific
grids, and minor research projects couldn’t get access
to them.
Cloud Computing has permitted to avoid such is-
sues, with virtualized computing ressources offered
as an IaaS Cloud Service. Small research groups can
harness these resources, and pay only for usage. In
such approach, these groups manage also the underly-
ing computing infrastructure, and not only the design
of computing applications.
To avoid infrastructure management, PaaS Cloud
Services can be used for application deployment
only. They offer application-level services that
harness distributed computing common models like
Map/Reduce, without any prior expert knowledge.
Unfortunately, actually no PaaS cloud service offers
the same features for high performance computing,
more particularly for brain dMRI processing and anal-
ysis.
Acigna-G project is an ongoing effort to offer
a convenient deployment and use of brain dMRI
PaaS/SaaS Cloud Services onto a computing grid. In
this paper, we present the actual architecture of this
Cloud-oriented Grid Computing platform and the on-
going deployment of a MAS algorithm for brain seg-
mentation. Also, we discuss three important improve-
ments for this platform to allow the deployment of
brain dMRI Cloud Services : HTTP/Restful oriented
computing services for the management of user’s ser-
vice requests, application-level virtualization coupled
with distributed computing models, and separation of
user request management and computing tasks execu-
tion as found on actual PaaS Cloud Services.
The remaining parts of the paper are organised as
follows : In section 2 we present brain dMRI soft-
wares and features needed for a cloud service. In Sec-
tion 3, we discuss computing grids architectures, and
in Section 4, PaaS Cloud Services architecture. In
Section 5, we present the actual Acigna-G architec-
ture and the ongoing deployment of a MAS algorithm
for brain segmentation. In Section 6, we discuss the
improvements to achieve for the platform. Section 7
concludes the paper.
141
Benmerar T. and Oulebsir-Boumghar F..
FROM GRIDS TO CLOUD - The Pathway for Brain dMRI Cloud Services.
DOI: 10.5220/0003960401410146
In Proceedings of the 2nd International Conference on Cloud Computing and Services Science (CLOSER-2012), pages 141-146
ISBN: 978-989-8565-05-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 BRAIN dMRI CLOUD
SOFTWARES AND SERVICES
2.1 Introduction
In this section, we introduce the actual Brain dMRI
Softwares. After that, we discuss the important fea-
tures that are needed for a Cloud Service for Brain
dMRI.
2.2 Actual Brain dMRI Softwares
Medical Imagery softwares such as MedInria (Med-
Inria, 2012) and FSL (FSL, 2012) propose different
kinds of dMRI processing and visualization like dif-
fusion tensor field estimation and visualization, and
white fibers tractography. We should note that tools
such as FSL provide a low level command lines to
launch certain processings. This allows the deploy-
ment of grid tasks using FSL, and commands such as
fsl sub provide a parallelization for these processings.
Providing a Cloud Service for such processing is
important for broad access, and for providing a flexi-
ble software upgrades.
2.3 A Brain dMRI Cloud Service
A Brain dMRI Cloud Service should deliver the same
features provided by the mentionned softwares, but
accessible using a web browser to provide a conve-
nient and broad access. In fact, three types of users
will interact with such cloud : Researchers will pro-
vide the state of the art optimised and parallelized al-
gorithms, developers will provide the back-end PaaS
applications and front-end SaaS applications, and fi-
nally the clinicians who will authenticate and use the
provided SaaS for medical diagnosis.
We should note that the client web browser inter-
acts with the cloud through a Restful/HTTP interface.
Also, all the back-end infrastructure is composed of
grid ressources that span different organisations.
3 TASK-BASED AND
SERVICE-BASED GRID
ARCHITECTURE
3.1 Introduction
In the grid computing world, two strategies exist for
the infrastructure deployment : Task based strategy
and service based strategy (Glatard et al., 2008). In
this section, we present both strategies and the rele-
vant pros and cons for latter comparisons.
3.2 Task-based Architecture
In the task based strategy or global computing, com-
puting tasks to be executed are defined by the user
by specifying the executable code file, the input data
files, and the command line parameters to invoke the
execution. This strategy is known for using batch sys-
tems for task execution. The best known Grid Middle-
ware adopting this strategy is Globus (Foster, 2006).
Although these systems allow the deployment of a
rich set of grid applications, they are known for being
highly centralized, and alternative P2P Grid platforms
such as JaceP2P (VUILLEMIN, 2008) have been pro-
posed for problems having interdependant comput-
ing units. Also, prior knowledge of the Grid API is
mandatory.
3.3 Service-based Architecture
In the service based strategy or meta computing, the
application codes are wrapped into standard inter-
faces, and only the invocation interface is known.
DIET (Amar et al., 2008) adopts this strategy, and en-
ables the deploment of NES (Network Enabled Server
System) (Matsuoka et al., 2000), using an RPC-style
(Remote Procedure Call). It offers access to a set
of servers offering specific computing services, for
a specific problem set, using a web browser, a com-
piled program or a PSE (Problem Solving Environ-
ment) like Matlab or Scilab.
This strategy is a simpler alternative, as input pa-
rameters are the only mendatory elements needed for
service invocation. Neverthless, the client is con-
strained to available services, and custom grid appli-
cation deployment is impossible. Also, the user must
be familiar with Grid API for service interaction us-
ing a custom code. Furthermore, for several depen-
dant service invocations, data are sent back and forth,
resulting to unnecessary communications. Recent re-
searches have proposed solutions such as data persis-
tence and redistribution to solve this issue (Desprez
and Jeannot, 2004).
4 PaaS CLOUD SERVICES
ARCHITECTURE
4.1 Introduction
Microsoft Windows Azure (Chappell, 2012) and
Google App Engine (Google, 2012) are among the
CLOSER2012-2ndInternationalConferenceonCloudComputingandServicesScience
142
earliest and the major PaaS Cloud Providers. We re-
view in this section some archicture points that can be
used for the construction of a PaaS Cloud Service for
a brain dMRI.
4.2 Application-level Virtualization
Actually, PaaS applications are run in a virtualized
sandboxed environment, for a secure execution. The
sandboxing is ensured by the VM executing the ap-
plication. It restricts the application execution to a
limited set of standard libraries and PaaS application-
level services (datastore, mail, memcache etc.).
Neverthless, as this approach restricts access to
the underying OS, binary programs written in lan-
guages such as C/C++ or Fortran are not supported.
4.3 Common Distributed Computing
Model
Today, Distributed Computing Models such as Map
Reduce (Dean and Ghemawat, 2004) or Memcache
(Dormando, 2012) allow us building scalable web ap-
plications. Web giants such as Facebook and Google
actually use them for their web portals and applica-
tions, and have opensourced some of them for broad
use.
From a PaaS standpoint, these models are pro-
vided as application-level services. No detailed im-
plementation knowledge is required, and access is
done in a convenient way.
4.4 Separation of User Request
Management and Background
Tasks Management
Some user requests to a PaaS web application cannot
be handled in a timely fashion. These requests require
intensive tasks to be executed.
To solve such issue, PaaS platforms provide a way
to place a task in a queue, and be executed in the back-
ground. In this case, the web application recieves the
request and delegates it to a background task, so that
it can deliver a response in a short time.
5 Acigna-G ARCHITECTURE AS
A SOLUTION
5.1 Introduction
Previous works on Acigna-G (Benmerar and
Oulebsir-Boumghar, 2011) introduced an application-
level virtualization layer inspired by actual PaaS
platforms, and a particular architecture named
multi-level services architecture. The initial objectif
was to provide an experimental cloud service for the
submission and use of grid applications without prior
expertise of grid protocols.
Three levels of hierarchy exist represented by
the Master Server, the local server, and the com-
pute ressource. The master server manages all the
grid ressources and tasks, the local server manages
ressources and tasks at a given site. The compute
ressource manages the execution of tasks at its level.
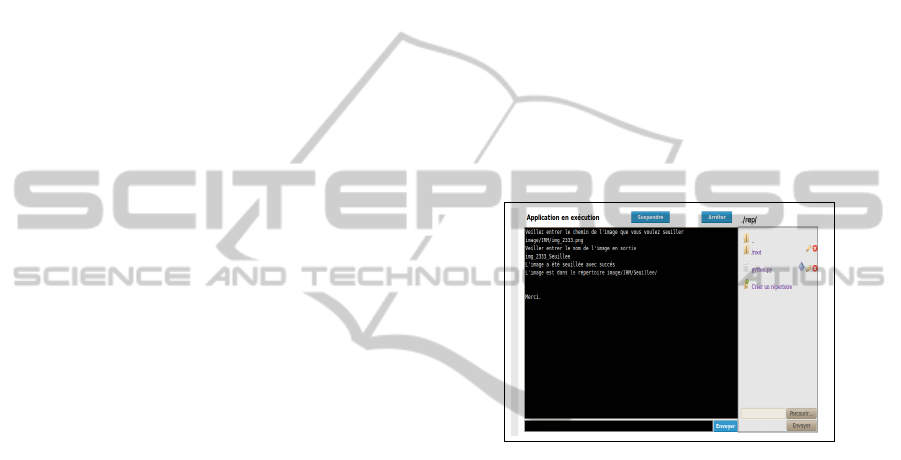
A given application is decomposed into application
instances or tasks, each one executing different codes,
sandboxed using Plash (Seabon, 2012), and interact-
ing with each other through the virtualization layer.
For a convenient interaction with tasks, we provide a
virtual web terminal as illustrated in Figure 1.
Figure 1: Virtual web terminal (Benmerar and Oulebsir-
Boumghar, 2011).
In the remaining parts of this section, we introduce
the multi-level services architecture, and we present
the ongoing deployment of a MAS algorithm for brain
segmentation.
5.2 Multi-level Services Architecture
Multi-level Services Architecture is the main archi-
tecture contribution of Acigna-G. The Multi-level
Services (see Figure 2) architecture implements web
services which are at different hierarchical levels
represented by the Compute Ressources, the Local
Servers and the Master Server. Each service can call
services implemented on nodes (i.e Master Server,
Local Servers or Compute Ressources) located at the
same hierarchical level with the same parent, on the
parent node or on the child nodes.
This architecture allows a flexible services calls
propagation with interresting consequences : Firstly,
some service calls originated from applications can
avoid upward propagation of calls, to decrease loads
on Local and Master Server. Secondly, the possibil-
FROMGRIDSTOCLOUD-ThePathwayforBraindMRICloudServices
143
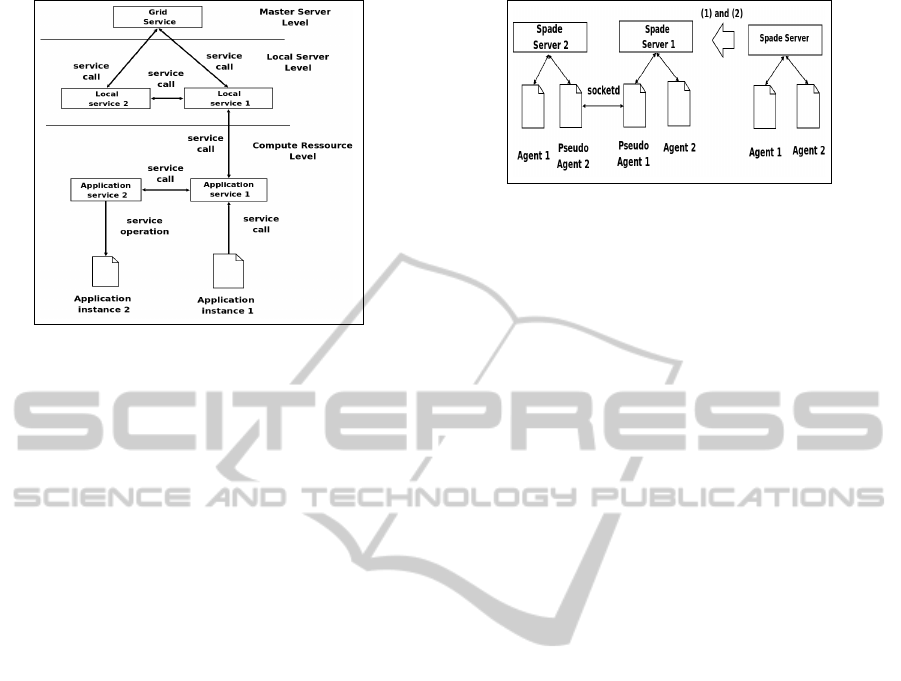
Figure 2: Acigna-G Multi-level Services architecture.
ity of P2P inter-nodes communication allows an effi-
cient deployment of applications with interdependant
computing units. Finally, this architecture is a flexible
way to interpret application instance service calls into
an interaction with the grid infrastructure.
5.3 Deploying a MAS Algorithm for
Brain Segmentation
Haroun et al. have proposed a new hybrid segmen-
tation algorithm (Haroun et al., 2005). It is a MAS
algorithm combining different methods such as K-
Means, FCM and contextual methods such as Re-
gion growing and produces better results than non-
hybrid ones. A Python implementation of this algo-
rithm (Laguel, 2010) using the SPADE environment
(Spade, 2012) have been deployed onto the BrainVisa
platform (BrainVISA, 2012).
Currently, there is an ongoing deployment of this
algorithm onto Acigna-G. Before that, we are cur-
rently adapting the python application to the platform
by following two main steps (see Figure 3) :
1. Creating pseudo agents and many spade servers.
The communication between pseudo agents is
done with socket.
2. Using socketd application service for pseudo
agents communication. Socketd allows socket use
for communication between two instances even if
executed in different compute ressources. It gives
an illusion to both of them that they are on the
same ressource.
To conclude this section, we should note that ad-
ditional efforts are required to integrate any existing
platform such as Spade to a virtualized multi tenant
environment, as they have been originally designed
for non-virtualized single tenant one.
Figure 3: Adapting the MAS algorithm to Acigna-G.
6 Acigna-G IMPROVEMENTS TO
ACHIEVE
6.1 Introduction
In the present section, we discus the future improve-
ments of our Acigna-G platform, towards building
a SaaS/PaaS Brain dMRI Cloud Service. We dis-
cuss three important improvements : HTTP/Restful
oriented computing services for the management of
user’s service requests, application-level virtualiza-
tion coupled with distributed computing models, and
separation of user request management and comput-
ing tasks execution as found on actual PaaS Cloud
Services.
We also discuss the use of a convenient program-
ming language for the development of PaaS applica-
tions, and describe briefly the integration of workflow
management in Acigna-G.
6.2 Managing User Service Requests
We have seen that PaaS platforms separate back-
ground tasks management from user requests man-
agement. By analogy and from a grid computing
standpoint, task management would refer to the grid
application execution management. HTTP/Restful
user request management actually doesn’t exist in a
grid environment.
To improve our platform, we propose adding
HTTP/Restful cloud services support, separated from
the task management. These cloud services would al-
low external non-grid users to be authenticated and in-
voke certain computing services. Hence, we have two
type of users : Grid users, that have access to comput-
ing ressources and service users, that have only ac-
cess to the different HTTP/Restful services. The user
authentication is ensured at the Restful/HTTP Master
Service level.
As for master, local and application computing
services found in our Multi-level Services Architec-
ture, there would exist a whole hierarchy of Rest-
CLOSER2012-2ndInternationalConferenceonCloudComputingandServicesScience
144
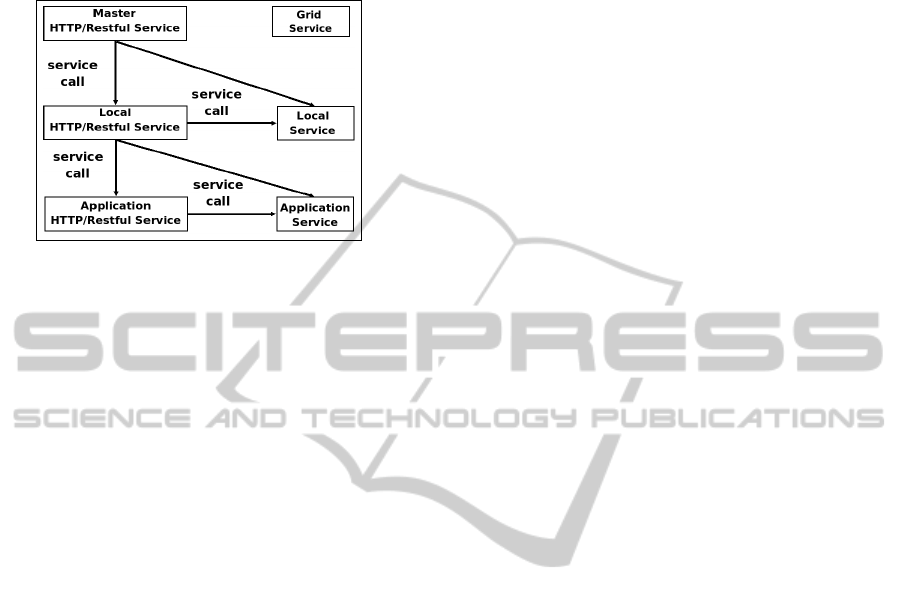
ful/HTTP services. For any invocation requiring a
task management, it should be delegated to a com-
puting service as illustrated in Figure 4.
Figure 4: HTTP/Restful Services.
In the context of a brain dMRI cloud service, non-
grid users are doctors that can submit a dMRI image
to a Restful Service using an external web interface.
The Restful Service would submit a new task to the
grid by invoking a grid-level service.
6.3 Application-level Virtualization and
Common Parallel/Distributed
Computing Models
We have observed that PaaS common distributed
models, conveniently accessible as application-level
services permit users the built of scalable web appli-
cations without detailed implementation knowledge.
The actual multi-level services architecture allows a
virtualized interaction between different application
instances, but it still gives a low-level control of the
application to the grid user.
Keeping the same architecture but making the
virtualized environment more abstract, we envi-
sion some application services as Parallel/Distributed
computing services that can be invoked from the ap-
plication. From the grid computing standpoint, this
can be seen as equivalent to a service based strategy
where both server and client codes are on the same in-
frastructure. The latter point allows the resolution of
dependant service invocation issue we have seen with
such strategy.
If we restrict the application to use only these ser-
vices, the load on a given node is due to services
code execution rather than applications code execu-
tion, leading to a better management of the infrastruc-
ture. For example, depending on the available nodes
and their computing loads, a given service can be ex-
ecuted on a different node, or be split into a differ-
ent number tasks, to load balance the multiple nodes.
As the execution detail is left to the service, it can be
optimised for nodes containing GPUs (Graphic Pro-
cessing Units) or CPUs (Central Processing Units),
depending on the task.
In the brain dMRI cloud service context, these
computing services can be seen as common process-
ing tasks such as Diffusion Tensor Field estimation,
parallelized and optimized for a grid execution.
6.4 Workflow Management
As part of the future improvments, a workflow can
be invoked at the application service level. This
will help implementing complexe services constitued
from smaller unit tasks. Where each one, can be a
service invocation or an executable task.
In the common parallel/distributed models con-
text, some models can be implemented as workflows
for an even better conveniency at the application ser-
vice level.
6.5 Convenient Programming
Languages
Use of common parallel/distributed models for
application-level services in this new architecture, has
led us to propose the support of specific VM powered
programming languages, as the real computing load
is on the service execution, rather than on the appli-
cation itself. Hence, the user has a high-level control
on the application execution, and a convenient pro-
gramming would make the use of application-level
services easier. For such purpose, we have choosen
the Python programming language, for different rea-
sons (Caia et al., 2005) :
• Python is a very convenient programming. MIT
school has proposed it in an introductory course
to programming.
• Python can be optimised for scientific comput-
ing and parallel programming, thanks to modules
such as numpy.
• In fact, for maximum optimisation, specific parts
that are commonly used in scientific computing
are implemented and compiled in C and can be
called from python, thanks to the C-API interface.
7 CONCLUSIONS
Additional efforts and improvements are needed to
adapt grids for providing PaaS/SaaS brain dMRI
Cloud Services. This is reflected in our experimen-
tal and ongoing Acigna-G project, and as a first step
FROMGRIDSTOCLOUD-ThePathwayforBraindMRICloudServices
145

towards such goal the introduction of the Multi-level
Services Architecture, that was proposed in a previous
work is necessary, as it provides for the applications,
a more convenient access to their grid environment,
in a virtualized manner. Actually, there is an ongo-
ing deployment of a MAS algorithm implemented in
Python/Spade, and we can argue that one of the dif-
ficulties of such paradigm shift is that existing plat-
forms such as Spade need additional efforts to adapt
them to a virtualized multi tenant environment.
Deep analysis of the current PaaS platforms ar-
chitectures gave us interesting insights for the future
improvements of the platform to achieve our objectif.
Firstly, a whole new hierarchy of HTTP/Restful ser-
vices will be built, that are equivalent in architecture
to the existing Acigna-G computing services, but for
non-grid users service requests management. It will
allow to such users a convenient access to different
computing services without direct grid ressources ac-
cess. And secondly, we have proposed the integration
of parallel/distributed models such as optimized and
parallelized Diffusion Tensor Field estimation for the
platform. With such an architectural point introduced,
we’ll avoid the existing platform adaptation issue, and
have a better infrastructure management as the real
computing load is on the service execution.
REFERENCES
Allen, G., Davis, K., Dolkas, K. N., Doulamis, N. D.,
Goodale, T., Kielmann, T., Merzky, A., Nabrzyski, J.,
Pukacki, J., Radke, T., Russell, M., Seidel, E., Shalf,
J., and Taylor, I. (2003). Enabling applications on the
grid a gridlab overview.
Amar, A., Bolze, R., Boix, E., Caniou, Y., Caron, E.,
Chouhan, P. K., Combes, P., Dahan, S., Daila, H.,
Delfabro, B., Frauenkron, P., Hoesch, G., Isnard, B.,
Jan, M., L’Excellent, J.-Y., Mahec, G. L., Christophe,
P., Cyrille, P., Alan, S., C
´
edric, T., and Antoine, V.
(2008). Diet user’s manual. inria, ens-lyon, ucbl.
Retrieved January 27, 2012. http://graal.ens-lyon.fr/
DIET/download/doc/UsersManualDiet2.4.pdf.
Benmerar, T. Z. and Oulebsir-Boumghar, F. (2011). To-
ward a cloud architecture for medical grid applications
: The acigna-g project. In Proceedings of the 10st
International Symposium on Programming and Lan-
guages ISPS ’2011.
BrainVISA, T. (2012). Brainvisa official website. Retrieved
January 27, 2012. http://www.brainvisa.info.
Caia, X., Langtangen, H. P., and Moea, H. (2005). On the
performance of the python programming language for
serial and parallel scientific computations. Scientific
Programming, 13:31–56.
Chappell, D. (2012). Introducing Windows Azure.
David Chappell and Associates. Retrieved Jan-
uary 27, 2012. http://www.davidchappell.com/
OnBeingIndependent– –Chappell.pdf.
Dean, J. and Ghemawat, S. (2004). Mapreduce: Simplified
data processing on large clusters. In Proceedings of
the OSDI’04: Sixth Symposium on Operating System
Design and Implementation.
Desprez, F. and Jeannot, E. (2004). Improving the gridrpc
model with data persistence and redistribution. In
Proceedings of the Third International Symposium
on Parallel and Distributed Computing/Third Interna-
tional Workshop on Algorithms, Models and Tools for
Parallel Computing on Heterogeneous Networks (IS-
PDC/HeteroPar’04).
Dormando (2012). What is google app engine ? Retrieved
January 27, 2012. http://memcached.org.
Foster, I. (2006). Globus toolkit version 4: Software for
service-oriented systems. Journal of Computer Sci-
ence and Technology, 21(4):513–520.
FSL (2012). Fsl website. Retrieved January 27, 2012. http://
www.fmrib.ox.ac.uk/fsl/.
Glatard, T., Montagnat, J., Lingrand, D., and Pennec, X.
(2008). Flexible and efficient workflow deployment of
data-intensive applications on grids with moteur. In-
ternational Journal of High Performance Computing
Applications.
Google (2012). What is google app engine ? Retrieved
January 27, 2012. http://code.google.com/appengine/
docs/whatisgoogleappengine.html.
Haroun, R., Oulebsir-Boumghar, F., Hassas, S., and
Hamami, L. (2005). A massive multi agents system
for brain mri segmentation.
Laguel, H. (2010). D
´
eploiement sur une plateforme de visu-
alisation 3D, d’un algorithme coop
´
eratif pour la seg-
mentation d’images IRM, autour d’un syst
`
eme multi-
agents. Computer Sciences P. F. E., 12 Oct. 2010, di-
rected by F. Oulebsir-Boumghar., FEI, USTHB Alger.
USTHB.
Matsuoka, S., Nakada, H., Sato, M., and Sekiguchi, S.
(2000). Design issues of network enabled server sys-
tems for the grid. grid forum, advanced programming
models working group whitepaper. volume 1971,
pages 4–17.
MedInria (2012). Mediniria website. Retrieved January 27,
2012. http://med.iniria.fr.
Seabon, M. (2012). Plash’s sandbox environnment.
Retrieved January 27, 2012. http://plash.beasts.org/
environment.html.
Spade (2012). Spade2 - smart python agent environment.
Retrieved January 27, 2012. http://code.google.com/
p/spade2/.
Vecchiola, C., Pandey, S., and Buyya, R. (2009). High-
performance cloud computing: A view of scientific
applications. In ISPAN 09: Proceedings of the 2009
10th International Symposium on Pervasive Systems,
Algorithms, and Networks, pages 4–16.
VUILLEMIN, P. (2008). Calcul it
´
eratif asynchrone sur in-
frastructure pair
`
apair : la plateforme JaceP2P. PhD
thesis, Universit
´
e de Franche-Comt
´
e UFR Sciences et
Techniques Laboratoire d’Informatique de l’Universit
de Franche-Comt
´
e.
CLOSER2012-2ndInternationalConferenceonCloudComputingandServicesScience
146
