
Efficient Multi-alternative Protocol for Multi-attribute Agent Negotiation
Jakub Brzostowski
1
and Ryszard Kowalczyk
2
1
Institute of Mathematics, Silesian University of Technology, ul. Kaszubska 23, Gliwice, Poland
2
Faculty of Information and Communication Technologies, Swinburne University of Technology,
John St, Hawthorn, Australia
Keywords:
Negotiation, Negotiation Protocol, Negotiation Offer.
Abstract:
In this paper we present a novel multi-alternative negotiation protocol for multi-attribute agent negotiations.
It allows for improvement of negotiation outcomes in terms of time needed to reach an agreement and the
Pareto optimality of the outcome. By allowing the agent to offer a proposal comprising a set of alternatives
we eliminate the problem of making trade-offs in the negotiation. We experimentally evaluate the proposed
approach to show how it performs in comparison to a typical negotiation protocol.
1 INTRODUCTION
In this work we propose a novel negotiation protocol
for multi-attribute agent negotiations allowing agents
to improve the negotiation outcome both in terms of
time needed to perform a successful negotiation and
Pareto efficiency of agreements. Typical negotiation
protocols used for solving the multi-attribute agent
negotiations are based on exchanging single offers.
This means that in the consecutive rounds of nego-
tiation an agent can only propose a single agreement
alternative. Such a negotiation protocol requires an
agent to trade-off between multiple attributes of an
object under negotiation in order to improve the ne-
gotiation outcome in terms of Pareto efficiency. How-
ever, making trade-offs in multi-attribute negotiations
is a difficult problem since it is hard to determine the
direction of trade-offs that guarantees the optimal out-
come.
Works of John Nash (Nash, 1950) formulate the
negotiations as cooperative games and propose a so-
lution in the form of an arbitration scheme, which un-
derpins mediation in negotiations. Based on the Nash
bargaining solution a negotiation protocol needs to al-
low the agents to truthfully reveal their preferences to
a trusted third party, i.e. a mediator. The preferences
are aggregated by the mediator to determine a solution
satisfying a series of axioms. The problem in such an
approach is the assumption of truthful revelation of
preferences. Therefore, instead of revealing the full
structure of preferences, a number of negotiation pro-
tocols assume the agents can exchange single offers
repeatedly until they reach an agreement. The method
based on multiple exchange of offers is more practical
and realistic since the structure of preferences is not
revealed.
In general, most existing approaches are based ei-
ther on the assumption of knowledge about the oppo-
nents preferences or the use of a trusted third party,
i.e. mediator that can guide the negotiation agents
in making efficient trade-offs and reaching an agree-
ment. In the mediation approach the parties submit
some knowledge about their preferences to the me-
diator that fuses the knowledge of both parties and
proposes solutions. Ethamo et. al (Ethamo et al.,
1999) present a constraint proposal method to gen-
erate a Pareto frontier of a multi-attribute negotiation.
The mediator generates a constraint in each consec-
utive step and asks the parties to find an optimal so-
lution satisfying this constraint. If the feedback from
the agents coincide then a solution is found, other-
wise the mediator updates the constraint based on the
received feedback and the procedure continues. The
approach proposed by Klein et al. (Klein et al., 2003)
addresses mediation in the case of complex contracts
where the values of issues are binary (either 0 or 1).
In each stage of mediation the unbiased mediator gen-
erates an offer and proposes it to the parties. In the
next stage the agents vote whether to accept the of-
fer or not according to their private strategies. If both
agents vote to accept the proposed offer it is mutated
in the next stage (values of some issues are switched)
and the procedure is repeated. In the case one of the
agents votes to reject an offer, the last acceptable of-
247
Brzostowski J. and Kowalczyk R..
Efficient Multi-alternative Protocol for Multi-attribute Agent Negotiation.
DOI: 10.5220/0003968102470252
In Proceedings of the 14th International Conference on Enterprise Information Systems (ICEIS-2012), pages 247-252
ISBN: 978-989-8565-10-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

fer is mutated and proposed again to the parties. In the
work of Li et al. (Li et al., 2011) the authors present
an approach for supporting mediation with the use of
the Conditional Preference (CP) Networks. Similarly
to the approach of Klein et al. (Klein et al., 2003)
the approach is applicable for issues with low level
of options. The agents build their CP networks that
encode their preferences and then submit them to the
third party which fuses the preferences by the use of
majority rule-based aggregation.
The approaches to trade-off performed by individ-
ual agents, rather than the mediator, include a mecha-
nism proposed by Faratin et al. (Faratin et al., 2002)
that uses similarity criteria. The trade-off is per-
formed according to a similarity measure between the
last offer proposed by the counterpart and the current
proposal of the negotiation agent. In making a trade-
off the indifference curve is considered. An alterna-
tive located on the indifference curve that maximizes
the similarity to the last offer proposed by the coun-
terpart is selected for a proposal. Other approaches
modify protocols of negotiation allowing the agents
to include in the proposal different type of knowledge
apart form the negotiation alternative, i.e. the agent
can also send to the counterpart arguments aiming at
convincing the partner to change his beliefs. A be-
lief that can be influenced by such a kind of persua-
sion is typically the utility function of the counterpart.
Sycara (Sycara, 1991) proposes an approach incorpo-
rating argumentation into negotiation and illustrates
the merit of argumentation-based reasoning in nego-
tiation dialogues.
Some works also consider protocols dependent on
the shape of preferences. Ito et all. (Ito et al., 2007)
consider non-linear utility functions, and propose a
protocol where the agents employ adjusted sampling
to generate proposals and use a bidding-based mech-
anism to find social welfare maximizing deals. How-
ever, in their work they also assume that the bids are
submitted to the mediator, which again is an issue
since such a protocol assumes revelation of private in-
formation. Similarly as in other works (Hattori et al.,
2007), (Fujita et al., 2010a) (Fujita et al., 2010b) there
is an issue with assuming a central authority to which
the information about utilities is revealed. Such solu-
tions require the presence of a third trusted party that
is unbiased, independent and capable of carrying out
intensive computation.
In the work (Bichler and Segev, 2001) authors
present an approach towards establishing a toolset for
the design of negotiation protocols on electronic mar-
kets focusing rather on mechanism of auction and as-
suming single-offer bids.
The work of Lai et al. (Lai et al., 2008) presents a
decentralized model for self-interested agents aiming
at reaching win-win solutions in the multi-attribute
negotiation. At each negotiation round an agent
proposes a multi-alternative offer, namely it offers
several alternatives in one round. When making a
counter-offerthe partner uses heuristic search in order
to propose an offer located on the indifference curve
that is closest to the best alternative contained in the
set proposed by its counterpart in the previous offer.
This alternative is used as a seed and the remaining
alternatives that will be send together with the seed
are chosen from the neighbourhood of this alterna-
tive. However in that approach there is no guarantee
of reaching a Pareto optimal solution.
In this paper we propose a protocol that uses
multi-alternative offers and allows the agents to reach
a Pareto optimal solution. In our approach the agents
exchange offers consisting of sets of alternatives de-
termined by α-cuts of the search space in each round
of negotiation. Therefore, we do not need to apply
any heuristic to search the space of alternatives that
can be proposed. The proposed protocol is presented
in Section 2. Its experimental evaluation and discus-
sion of the results is presented in Section 3. The con-
cluding remarks are presented in Section 4.
2 THE NOVEL NEGOTIATION
PROTOCOL
Typical protocols used in agent negotiation are based
on exchanging single alternative proposals. Namely
in each consecutive round of negotiation an agent
sends to its counterpart an offer consisting of a single
alternative. In such an approach the agents are forced
to performtrade-offs while looking for agreement that
can satisfy the preferences of both negotiation parties.
In this paper we consider an approach in which in-
stead of single alternative offers the agents can use
multiple alternatives enclosed in one negotiation pro-
posal. In such a situation the sending agent assumes
that all alternatives enclosed in the offer are accept-
able with the same value of utility. This means that all
alternatives proposed in one round of negotiation are
indifferent to the proposing agent. The counterpart
receiving the offer can check each of the alternatives
contained in the offer to what extend its preferences
are satisfied. In such a situation the receiver can se-
lect the alternative maximizing its utility and decide if
such an alternative is suitable to form an agreement.
It is intuitive that in the case of multiple alternatives
forming one proposal the chance of finding an agree-
ment is higher than in the case of a protocol where
a single alternative is proposed. Indeed, as we will
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
248

show later in this paper an agreement is reached faster
and its value is more efficient than in the case of a typ-
ical protocol. More specifically the proposed protocol
is realized as follows. The preferences of a negotia-
tor are encoded by an utility functions assigning to
each feasible alternative a score. The agent concedes
during the negotiation process in the space of utility
according to its negotiation strategy. At each nego-
tiation round the agent proposes a full set of alter-
natives (in a discrete space of alternatives) exceeding
the current value of utility. The offer comprising all
alternatives exceeding particular value of utility that
eliminates the need of using trade-offs since the offer
contains the whole indifference curve.
2.1 Negotiation Thread
The negotiation thread is a sequence of proposals and
counter-proposals of two negotiation parties. As said
above the elements of the sequence are subsets of the
acceptance sets of two negotiation parties. Let us as-
sume that the agents defined its utility functions u
a
and u
b
over the sets of feasible two-attribute alterna-
tives D
a
and D
b
(acceptance sets) of agent a and agent
b, respectively.
Definition 1. A Negotiation thread between agents
a, b ∈ Agents at time t
n
∈ Time is any finite sequence
of length n of the form (C
t
1
a→b
,C
t
2
a→b
, . . . ,C
t
n
a→b
) with
t
1
,t
2
, . . . , t
n−1
≤ t
n
, where:
1. t
i+1
> t
i
2. Each offer C
t
i
a→b
proposed by agent a is deter-
mined in the following way: C
t
i
a→b
= {(x, y) ∈
D
a
|u
a
(x, y) ≥ f
a
(t
i
)} where f
a
(t
i
) is the conces-
sion in utility space in time point t
i
for agent a
3. The analogous offer C
t
i
b→a
proposed by agent b
is determined in the following way: C
t
i
b→a
=
{(x, y) ∈ D
b
|u
b
(x, y) ≥ f
b
(t
i
)} where f
b
(t
i
) is the
concession in utility space in time point t
i
for
agent b
The negotiation thread is active if none of the agents
accepted the offer or withdrew from the negotiation.
2.2 Evaluation Decisions
The evaluation decision says when the negotiation
agent can propose its next offer, accept the counter-
part’s offer or withdraw from the negotiation. When
the offer that an agent a is going to propose in the next
round overlaps with the last offer of counterpart b the
agent a is ready to accept the partners last proposal.
The existence of non-empty overlap is equivalent to
the condition that the utility function u
a
of the agent
a exceeds the current level of its concession over the
last proposal of the counterpart b. When the overlap
is empty the agent a proposes the next offer. In the
case of exceeding the time given for negotiation the
agent a withdraws.
Definition 2. For the agent a and its associated util-
ity function u
a
, a’s interpretation (I) at time t
′
of the
counterpart offer C
t
b→a
proposed at time t < t
′
, is de-
fined as:
I
a
(t
′
,C
t
b→a
) =
withdraw(a,b) if t
′
> t
max
accept(a, b, p(C
t
b→a
∩C
t
′
a→b
)) if f(t
′
, β
a
) ∈ u
a
(C
t
b→a
)
offer(a,b,C
t
′
a→b
) otherwise
(1)
where f is a decision function and β
a
is the parameter
determining the shape of concession curve generated
with function f and p is a function choosing any point
from the set. The equivalent definition of interpreta-
tion is of the following form:
I
a
(t
′
,C
t
b→a
) =
withdraw(a, b) if t
′
> t
max
accept(a, b, p(C
t
b→a
∩C
t
′
a→b
)) if C
t
b→a
∩C
t
′
a→b
6=
/
0
offer(a, b,C
t
′
a→b
) otherwise
(2)
According to the above interpretation the negoti-
ation outcome is one point taken from the set C
t
b→a
.
The agent a will accept such a point if its current ac-
ceptance threshold f(t
′
, β
a
) lies in the image of last
opponents offer C
t
b→a
under the utility function u
a
of
agent a. Equivalently, the agent a will accept the point
p(C
t
b→a
) if the intersection of sets C
t
b→a
and C
t
′
a→b
is
not empty.
2.3 Concession Generation
Decisions - Tactics
In order to compute the counter-offer C
t
′
a→b
in the
form of a set an agent uses functions called tactics.
The tactics allow for computing concessions in the
utility space [0, 1] that then are used in computation
of the proposal.
2.3.1 Time-dependent Tactics
When an agent uses the time-dependent tactic it gen-
erates its offers according to time that elapses from
the beginning of negotiation. In other words the pre-
dominant factor influencing the value of concession is
the current point in time. The decision function gen-
erating offers in the case of time-dependent tactic is
dependent on deadline. The agent is conceding in the
utility space down to the lowest value 0 when it is ap-
proaching the deadline.
The set proposed at time t, with 0 < t < t
a
max
, is
determined by a function α
a
(t) specifying the current
level of utility concession.
C
t
a→b
= {(x, y) ∈ D
a
|u
a
(x, y) ≥ (1− α
a
(t))}
EfficientMulti-alternativeProtocolforMulti-attributeAgentNegotiation
249
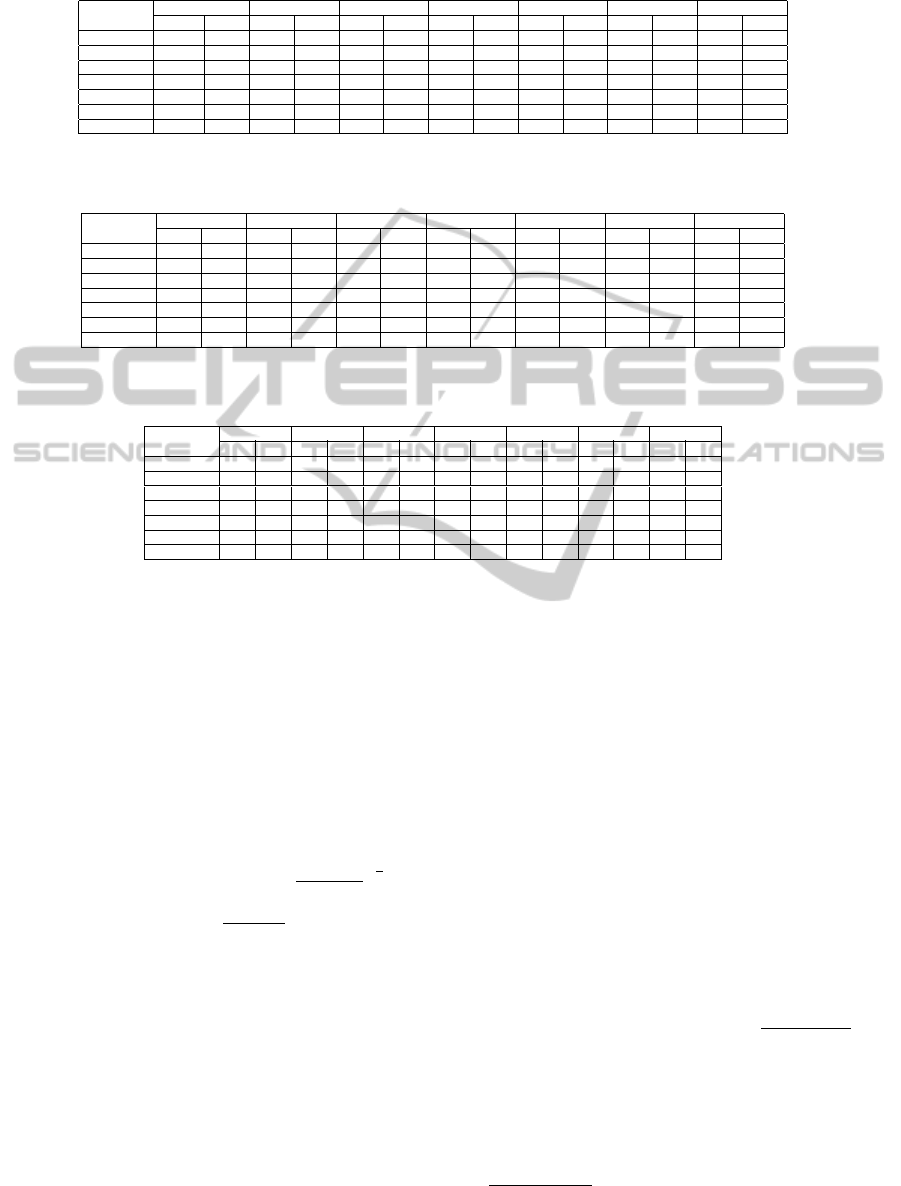
Table 1: The results of experiment - comparison of the classical approach and the efficient approach for different negotiation
strategies. The Table contains utility values obtained by the first agent for two approaches.
β
a
0.1 0.2 0.5 1 2 5 10
β
b
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
0.1 0.23 0.28 0.41 0.49 0.74 0.74 0.8 0.8 0.84 0.88 0.92 0.92 0.92 0.95
0.2 0.23 0.28 0.41 0.49 0.63 0.63 0.73 0.73 0.81 0.81 0.86 0.89 0.89 0.92
0.5 0.20 0.23 0.33 0.33 0.48 0.48 0.6 0.6 0.71 0.71 0.73 0.78 0.83 0.83
1 0.14 0.14 0.23 0.23 0.36 0.36 0.46 0.46 0.59 0.59 0.67 0.73 0.76 0.76
2 0.087 0.10 0.15 0.15 0.26 0.26 0.33 0.36 0.46 0.46 0.59 0.59 0.65 0.65
5 0.05 0.05 0.08 0.08 0.26 0.14 0.2 0.23 0.30 0.30 0.40 0.40 0.49 0.49
10 0.02 0.03 0.04 0.05 0.08 0.08 0.13 0.13 0.19 0.19 0.29 0.29 0.49 0.49
Table 2: The results of experiment - comparison of the classical approach and the efficient approach for different negotiation
strategies. The Table contains utility values obtained by the second agent for two approaches.
β
a
0.1 0.2 0.5 1 2 5 10
β
b
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
0.1 0.23 0.28 0.23 0.28 0.23 0.23 0.14 0.14 0.08 0.10 0.05 0.05 0.02 0.03
0.2 0.41 0.49 0.41 0.49 0.33 0.33 0.23 0.23 0.15 0.15 0.07 0.08 0.04 0.05
0.5 0.68 0.74 0.63 0.63 0.48 0.48 0.36 0.36 0.26 0.26 0.12 0.14 0.08 0.08
1 0.8 0.8 0.73 0.73 0.6 0.6 0.46 0.46 0.36 0.36 0.2 0.23 0.13 0.13
2 0.84 0.88 0.81 0.81 0.71 0.71 0.55 0.59 0.46 0.46 0.3 0.3 0.19 0.19
5 0.92 0.92 0.89 0.89 0.78 0.78 0.67 0.7 0.59 0.59 0.40 0.40 0.29 0.29
10 0.89 0.95 0.89 0.92 0.83 0.83 0.76 0.76 0.65 0.65 0.49 0.49 0.49 0.49
Table 3: The results of experiment - comparison of the classical approach and the efficient approach for different negotiation
strategies. The Table contains numbers of rounds used to reach agreement in case of two approaches.
β
a
0.1 0.2 0.5 1 2 5 10
β
b
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
u
c
u
a
0.1 2 1 2 1 5 2 12 6 20 10 36 18 46 22
0.2 2 1 2 1 8 4 16 8 28 13 40 19 46 23
0.5 5 2 8 4 14 8 22 12 30 16 42 22 50 25
1 10 6 16 8 22 12 30 16 38 19 46 23 50 26
2 18 10 26 13 32 16 38 19 42 22 50 25 54 27
5 34 18 37 19 44 22 46 23 50 25 54 27 54 28
10 44 22 45 23 49 25 50 26 54 27 54 28 54 28
The offer defined above includes all alternatives from
the acceptance set D
a
of the agent a that exceed
in terms of utility the current level of concession
1 − α
a
(t). The function α
a
(t) can be defined in va-
riety of ways under the condition that 0 ≤ α
a
(t) ≤ 1.
This range is universal since it can be rescaled to fit
the space in which the agent is conceding. Faratin
(Faratin et al., 2002) proposed two families of func-
tions, namely the polynomial decision functions and
exponential decision functions. Both families are
parametrized by a value of β ∈ R
+
specifying the
shape of the concession curve.
• polynomial α
a
(t) = k
a
+ (1− k
a
j
)(
min(t,t
a
max
)
t
a
max
)
1
β
• exponential α
a
(t) = e
(1−
min(t,t
a
tmax
)
t
a
max
)
β
lnk
a
where the parameter k
a
specifies the first concession,
β
a
is responsible for the shape of a curve, t
a
max
is the
deadline of the agent a and t is the current point in
time. In the next sections we extend the negotiation
tactics proposed by Faratin (Faratin et al., 2002) to fit
the proposed protocol.
2.3.2 Behaviour-dependent Tactics
The behaviour-dependent tactic computes the next of-
fer imitating the behaviour of the negotiation partner.
The concession in the utility space may be determined
based on the previous concessions of the negotiation
partner. The agent may imitate the concession in dif-
ferent ways. It may imitate the behaviour proportion-
ally, in absolute terms or it may compute the conces-
sion as an average of proportions in a number of pre-
vious offers. Hence, given the negotiation thread:
. . . ,C
t
n
−2δ
b→a
,C
t
n
−2δ+1
a→b
,C
t
n
−2δ+2
b→a
, . . . ,C
t
n
−2
b→a
,C
t
n
−1
a→b
,C
t
n
b→a
,
1. Relative Tit-for-Tat. The agent imitates the op-
ponent relative value of concession proposed δ >
1 steps ago. The imitative offer is determined by
multiplying previous offer of the decision-maker
by the relative concession of the counterpart. The
relative concession is the quotient of the two con-
secutive offers of the opponent proposed δ steps
ago. The condition of applicability is n > 2δ.
C
t
n+1
a→b
= {(x,y) ∈ D
a
|u
a
(x, y) ≤ min(max(
maxu
a
(C
t
n−2δ
b→a
)
maxu
a
(C
t
n−2δ+2
b→a
)
(1− α
a
(t
n−1
)), 0), 1)}.
The value maxu
a
(C
t
n−2δ
b→a
) is the utility of the best
alternative from the set C
t
n−2δ
b→a
from the view-
point of agent a. Therefore, the coefficient
maxu
a
(C
t
n−2δ
b→a
)
maxu
a
(C
t
n−2δ+2
b→a
is the proportion of utility by which
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
250

the negotiation partner conceded between the
round n − 2δ and the round n − 2δ + 2 from the
viewpoint of agent a. The proportion is multiplied
by the last level of utility concession 1− α
a
(t
n−1
)
what results in the utility level to which the agent
a is conceding in the next round of negotiation.
The next offer is computed as all alternative ex-
ceeding this level of utility in terms of utility func-
tion of the agent a.
2. Random Absolute Tit-for-Tat. The agent imi-
tates the concession of the opponent in absolute
terms. This means that for example if the conces-
sion of the opponent was 0.2 of utility then the
agent also concedes by 0.2. Additionally, the con-
cession is modified by a random value in order to
enable an agent to avoid a loop of non-improving
contract offers or a local minima in the social wel-
fare function (Faratin et al., 1998). The condition
of applicability is again n > 2δ.
C
t
n+1
a→b
= {(x, y) ∈ D
a
|u
a
(x, y) ≤
≤ min(max(maxu
a
(C
t
n−1
a→b
) − maxu
a
(C
t
n−2δ
b→a
) + (1− α
a
(t
n−1
)) +
+ (−1)
s
R(M), 0), 1)}
where
s =
0 If u
a
is decreasing
1 If u
a
is increasing
and R(M) is a random value from the interval
[0, M]. M is the maximal value by which an agent
can change its imitative behaviour.
As in the case of previous tactic the value
maxu
a
(C
t
n−1
a→b
) is the utility of the best alternative
from the set C
t
n−1
a→b
from the viewpoint of agent a.
The difference maxu
a
(C
t
n−1
a→b
) − maxu
a
(C
t
n−2δ
b→a
) is
the absolute value of concession of the negotia-
tion partner in utility space from the viewpoint of
agent a. This difference is summed with the last
value of utility concession 1 − α
a
(t
n−1
) of agent
a what results in the current utility level to which
the agent a is going to concede. All alternatives
exceeding this value are included in the next ne-
gotiation offer.
3. Average Tit-for-Tat. The agent imitates the over-
all concession of the opponent proposed in γ > 1.
steps. When γ = 1 then the offer is the same as
in the case of Relative Tit-for-Tat with δ = 1. The
condition of applicability is n > 2γ.
C
t
n+1
a→b
= {(x, y) ∈ D
a
|u
a
(x, y) ≤ min(max(
maxu
a
(C
t
n−2γ
b→a
)
maxu
a
(C
t
n
b→a
)
(1−α
a
(t
n−1
)), 0), 1)}.
The above tactics can be combined together to form
negotiation strategies ((Faratin et al., 2002)).
3 EXPERIMENTAL EVALUATION
AND DISCUSSION OF RESULTS
In this section we present results of an experiment
illustrating the efficiency of the proposed multi-
alternative protocol of reaching negotiation agree-
ment in comparison with a typical single-alternative
negotiation approach with similarity-based trade-off
(Faratin et al., 2002). We simulate a number of nego-
tiations in a two-attribute scenario.
We consider the following negotiation setup in-
volving two agents, a client agent and a provider
agent. For the client agent the acceptance range is a
Cartesian product of the ranges corresponding to two
attributes:
D
a
= [0, 1] × [0, 1]
Therefore, the range for the first and second attribute
is [0, 1]. The acceptance range for the second agent
in the role of provider is defined in the same way.
Over the sets D
a
and D
b
the utility functions for
both the agents are defined in the additive form. The
weights corresponding to the importance levels of the
attributes are set to 0.5. Therefore the function for the
client is defined as follows:
u
a
(x
1
, x
2
) = 0.5u
a
1
(x
1
) + 0.5u
a
2
(x
2
)
where the functions u
a
1
and u
a
2
are defined as follows:
u
k
(x
k
) =
1 if x
k
< 0.25
0.75−x
k
0.75−0.25
if 0.25 ≤ x
k
≤ 0.75
0 if x
k
> 0.75
(3)
For the provider agent the additive utility function
is defined in similar way as for the client agent:
u
b
(x
1
, x
2
) = 0.5u
b
1
(x
1
) + 0.5u
b
2
(x
2
)
However, the single-attribute utility functions are de-
fined with reversed monotonicity compared to the
functions of the client agent.
u
k
(x
k
) =
1 if x
k
> 0.75
x
k
−0.25
0.75−0.25
if 0.25 ≤ x
k
≤ 0.75
0 if x
k
< 0.25
(4)
As described above, the preferences of both agents
do not change during the negotiation experiment.
What varies in the experiment are the negotiation
strategies. We use the time-dependent tactics encoded
by the parameter beta indicating how sharp the con-
cession curve is. We apply a wide range of time-
dependent tactics varying from the value of 0.1 to 10.
We consider seven types of tactics with following val-
ues of β parameter:
β ∈ {0.1, 0.2, 0.5, 1, 2, 5, 10}
EfficientMulti-alternativeProtocolforMulti-attributeAgentNegotiation
251

For the values of β lower then 1 the strategy belongs
to Conceder strategy type. For the value of β equal
to 1 the shape of concession curve is linear. For the
values of β higher then 1 the negotiation strategy re-
sulting from the usage of such β values belongs to
Boulware strategy type. The variety of negotiation
strategies used in our experiment aims at investigat-
ing how the two approaches for negotiation perform.
In the Tables 1,2 we present the results of the experi-
ments. For various negotiation strategies we simulate
49 negotiation settings. In the Table 1 we present the
utility values (pay-offs) obtained by the first agent us-
ing the traditional (column u
c
) and proposed (column
u
a
) approaches. As we can see, the utilities obtained
in the scenario where the second approach was used
are not worse or better than utilities obtained in the
scenario where the first approach was used. The sit-
uation is similar for the second agent - the utilities
obtained in the scenario where the second approach
was used are at least as good as the utilities obtained
in scenario where the first approach was used. In the
case of scenario where the second approach was used
the obtained results are best, and can not be further
improved (in terms of Pareto efficiency) under the
assumption of particular preferences and negotiation
strategies. The reason for this observation is the appli-
cation of a specific negotiation protocol which allows
the agents to propose the full α-cuts. Such a protocol
leads to Pareto efficient outcomes since in a particu-
lar round of negotiation the agents propose all feasi-
ble alternatives exceeding the particular level of util-
ity allowed at this stage of negotiation. Therefore, the
second approach results in Pareto efficient outcomes
and therefore outperforms slightly the first approach
which does not guarantee the Pareto efficiency. In the
third Table 3 we present the comparison of numbers
of rounds used to reach agreement in scenarios where
the first and second approach was used (columns u
c
and u
a
, respectively). As we can see the number of
rounds resulting in agreement in the case of classical
approach is approximately twice larger as the num-
ber of rounds used to reach agreement in the case of
proposed approach and therefore it outperforms the
typical, single-alternative approach.
4 CONCLUDING REMARKS AND
FURTHER WORK
The paper presents a novel negotiation protocol for
multi-attribute agent negotiations based on using α-
cuts to determine multi-alternative offers. As shown
in the experiments it allows for improvement of nego-
tiation outcomes in the terms of time needed to reach
an agreement and the Pareto optimality of the out-
come. In addition by allowing the agent to offer a
proposal comprising a set of alternatives we eliminate
the problem of making trade-off in the negotiation.
In the future work the proposed approach will be
tested in scenarios involving different overlaps of ac-
ceptance ranges and different deadlines of the nego-
tiating parties. We will also consider a number of is-
sues, higher than two in further experiments.
REFERENCES
Bichler, M. and Segev, A. (2001). Methodologies for the de-
sign of negotiation protocols on e-markets. Computer
Networks, 37:137–152.
Ethamo, H., Hamalainen, R. P., Heiskanen, P., Teich, J.,
Verkama, M., and Zionts, S. (1999). Generating
pareto solutions in a two-party setting: Constraint pro-
posal methods. Management Science, 45:1697–1709.
Faratin, P., Sierra, C., and Jennings, N. R. (1998). Nego-
tiation among groups of autonomous computational
agents. University of Londond.
Faratin, P., Sierra, C., and Jennings, N. R. (2002). Us-
ing similarity criteria to make issue trade-offs in auto-
mated negotiations. Artificial Intelligence, 142:205–
237.
Fujita, K., Ito, T., and Klein, M. (2010a). Representative-
based protocol for multiple interdependent issue ne-
gotiation problems. Web Intelligence and Intelligent
Agents.
Fujita, K., Ito, T., and Klein, M. (2010b). A secure and fair
protocol that addresses weaknesses of the nash bar-
gaining solution in nonlinear negotiation. Group De-
cision and Negotiation, pages 1–19.
Hattori, H., Klein, M., and Ito, T. (2007). A multi-phase
protocol for negotiation with interdependent issues. In
Proc. of IAT.
Ito, T., Hattori, H., and Klein, M. (2007). Multi-issue nego-
tiation protocol for agents: exploring nonlinear utility
spaces. Proceedings of the 20th International Joint
Conference on Artificial Intelligence, pages 1347–
1352.
Klein, M., Faratin, P., Sayama, H., and Bar-Yam, Y. (2003).
Protocols for negotiating complex contracts. IEEE In-
telligent Systems, 18:32–38.
Lai, G., Sycara, K., and Li, C. (2008). A decentralized
model for automated multi-attribute negotiations with
incomplete information and general utility functions.
Multiagent and Grid Systems, 4:45–65.
Li, M., Vo, Q. B., and Kowalczyk, R. (2011). Majority-
rule-based preference aggregation on multi-attribute
domains with cp-nets. In Proceedings of Autonomous
Agents and Multi-Agent Systems.
Nash, J. (1950). The bragaining problem. Econometrica,
18:155–162.
Sycara, K. (1991). Problem restructuring in negotiation.
Management Science, 37:1248–1268.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
252
