Nonlinear Analysis of Costas Loop Circuit
N. V. Kuznetsov
1,2
, G. A. Leonov
1
, M. V. Yuldashev
1,2
and R. V. Yuldashev
1,2
1
Dept. of Mathematical Information Technology, University of Jyv¨askyl¨a,
P.O. Box 35 (Agora), FIN-40014, Jyv¨askyl¨a, Finland
2
Faculty of Mathematics and Mechanics, Saint-Petersburg State University,
Universitetsky pr. 28, Saint-Petersburg, 198504, Russia
Keywords:
Costas Loop, Phase-locked Loop, Phase Detector Characteristic, Nonlinear Analysis.
Abstract:
Problems of rigorous mathematical analysis of Costas Loop are considered. The analytical method for phase
detector characteristics computation is proposed and new classes of phase detector characteristics are com-
puted for the first time. Effective methods for nonlinear analysis of Costas Loop are discussed.
1 INTRODUCTION
The Costas loop was invented in 1950s by American
electrical engineer John P. Costas (Costas, 1956). It is
one of a few schemes of carrier recovery loop and it is
widely used in practice for binary phase-shift keying
(BPSK) demodulation technique.
Various methods for analysis of PLL, and partic-
ularly Costas loop, are well developed by engineers
(Gardner, 1966; Lindsey, 1972; Kroupa, 2003) but the
problems of construction of adequate nonlinear mod-
els and nonlinear analysis of such models are still far
from being resolved. As noted by D. Abramovitch
in his keynote talk at American Control Conference
(Abramovitch, 2002), the main tendency in a mod-
ern literature on analysis of stability and design of
PLL is the use of simplified linearized models, ap-
plication of the methods of linear analysis, a rule of
thumb, and simulation. However it is known that
the application of linearization methods and linear
analysis for control systems can lead to untrue re-
sults (e.g. the counterexamples to conjectures on ab-
solute stability and on harmonic linearization and to
filter hypothesis (Leonov et al., 2010a; Leonov and
Kuznetsov, 2011; Bragin et al., 2011)) and requires
special justifications. Also simple numerical analy-
sis can not reveal nontrivial regimes (e.g., semi-stable
or nested limit cycles, hidden oscillations and attrac-
tors (Gubar’, 1961; Leonov et al., 2008; Leonov et al.,
2010c; Leonov et al., 2011a)).
In this paper, following works (Leonov et al.,
2011b; Kuznetsov et al., 2011a; Kuznetsov et al.,
2011b; Leonov et al., 2010b; Kuznetsov et al., 2009a;
Kuznetsov et al., 2009b; Kuznetsov et al., 2008),
rigorous mathematical approach to investigation of
Costas loop is described. Mathematical model of high
frequency signals is considered and nonlinear model
of Costas loop is constructed. Investigation of Costas
loop behavior is reduced to investigation of PLL with
specific phase detector characteristic.
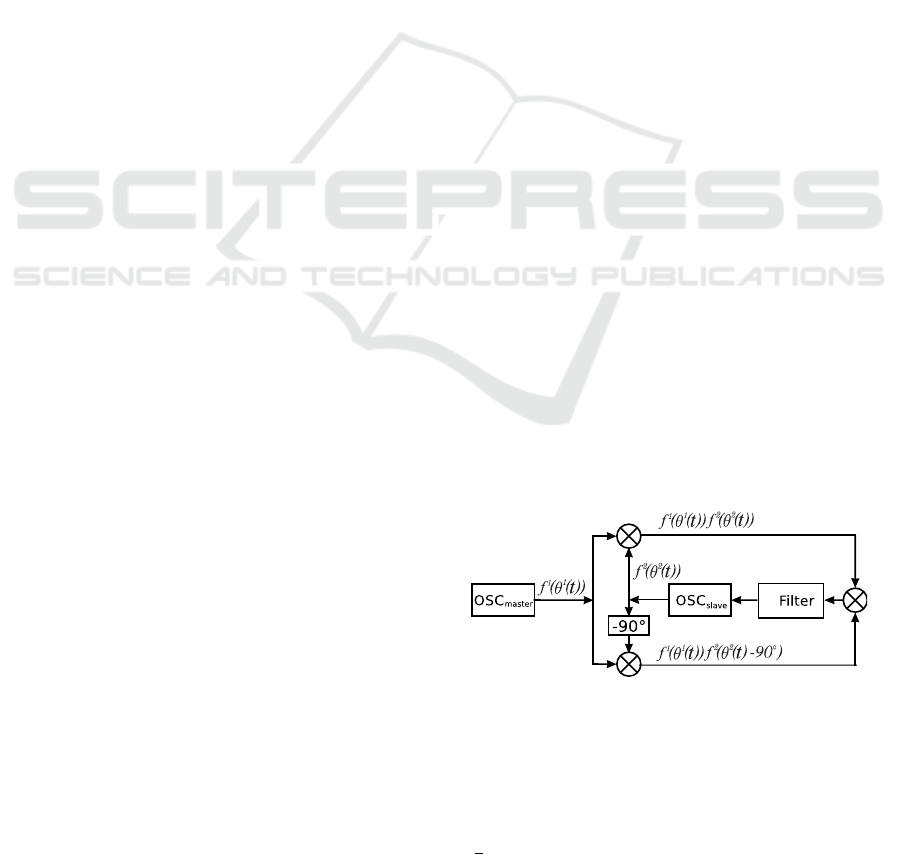
2 THE DESCRIPTION OF
COSTAS LOOP IN SIGNAL
SPACE
Consider Costas loop at the level of electronic real-
ization (Fig. 1).
Figure 1: Block diagram of Costas loop at the level of elec-
tronic realization.
Here OSC
master
is a master oscillator, OSC
slave
is
a slave (tunable voltage-controlled) oscillator, which
generates oscillations f
1,2
(t) with high-frequencies
˙
θ
1,2
(t). Block −90
o
shifts phase of input signal by
−
π
2
.
Block
N
is a multiplier of inputs. The relation be-
tween the input ξ(t) and the output σ(t) of linear fil-
ter has the form σ(t) = α
0
(t) +
t
R
0
γ(t −τ)ξ(τ)dτ. Here
γ(t) is an impulse transient function of filter, α
0
(t) is
an exponentially damped function, depending on the
initial state of filter at moment t = 0.
557
V. Kuznetsov N., A. Leonov G., V. Yuldashev M. and V. Yuldashev R..
Nonlinear Analysis of Costas Loop Circuit.
DOI: 10.5220/0003976705570560
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 557-560
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

3 COMPUTATION OF PHASE
DETECTOR
CHARACTERISTIC
Suppose, the phases θ
1
(t), θ
2
(t) of the considered sig-
nals are smooth functions with the frequencies
˙
θ
1,2
(t)
satisfying the following high-frequency conditions
˙
θ
p
(τ) ≥ ω
min
> 0, p = 1, 2
(1)
on the fixed time interval [0, T]. Also it is assumed
that the frequency difference is uniformly bounded
˙
θ
1
(τ) −
˙
θ
2
(τ)
≤ ∆ω, ∀τ ∈ [0,T],
(2)
where ∆ω is a certain constant.
Divide the interval [0,T] into small intervals
δ = (ω
min
)
−1/2
.
(3)
By assumption,
|
˙
θ
p
(τ) −
˙
θ
p
(t)| ≤ ∆Ω, p = 1,2,
|t − τ| ≤ δ, ∀τ,t ∈ [0,T],
(4)
where constant ∆Ω is independent of t, τ.
The function γ(t) is smooth and there exists a con-
stant C such that
|γ(τ) − γ(t)| ≤ Cδ,
∀τ,t ∈ [0,T], |t − τ| ≤ δ.
(5)
The latter means that on small intervals [τ,τ+ δ]
the functions γ(t) and
˙
θ
1,2
(t) are “almost constant”
and the functions f
1,2
(t) are rapidly oscillating. Ob-
viously, such a condition occurs in the case of high-
frequency oscillations.
Consider now harmonic oscillations
f
1
(θ
1
(t)) = b
1
1
cos(θ
1
(t)), f
2
(θ
2
(t)) = b
2
1
sin(θ
2
(t))
and two block diagrams shown in Fig. 2 and Fig. 3.
Figure 2: Two inputs and filter output.
Figure 3: Phase detector and filter.
In Fig. 3 θ
1,2
(t) are phases of oscillations
f
1,2
θ
1,2
(t)
, PD is a nonlinear block with the char-
acteristic ϕ(θ) (being called a phase detector or dis-
criminator). The phases θ
1,2
(t) are the inputs of PD
block and the output is the function ϕ(θ
1
(t) − θ
2
(t)).
It should be noted, that the shape of phase detector
characteristic depends on shapes of input signals.
In both diagrams the filters are the same with the
same impulse transient function γ(t) and the same ini-
tial states. The filters outputs are the functions g(t)
and G(t), respectively.
A classical Costas loop synthesis for harmonic
signals is based on the following result: For high-
frequency harmonic oscillation function ϕ(θ) has the
form ϕ(θ) =
1
8
b
1
1
b
2
1
sin(2θ) and for the same initial
data of filter, the following relation G(t) − g(t) ≈ 0 is
satisfied.
Further will be considered extension of this result
to non-harmonic signals. Consider a partially differ-
entiable odd function f
1
(θ
1
(t)) in the form of Fourier
series
f
1
(θ) =
∞
∑
i=1
b
1
i
sin(iθ), f
2
(θ) = b
2
1
sin(θ).
(6)
Here coefficients satisfy the relation b
1
i
= O(i
−1
).
Then the following assertion can be proved.
Theorem 1. If conditions (1)–(5) are satisfied (high-
frequency property) and
ϕ(θ) =
(b
2
1
)
2
8
−(b
1
1
)
2
sin(2θ)+2
∞
∑
q=1
b
1
q
b
1
q+2
sin(2θ)
,
then for the same initial state of filter relation
G(t) − g(t) = O(δ), ∀t ∈ [0,T] (7)
is valid.
This result can be extended to the case of full
Fourier series and allows one to compute a phase de-
tector characteristic for standard types of signals.
3.1 Proof of Theorem
Let t ∈ [0,T]. Consider the difference
g(t) − G(t) =
t
R
0
γ(t − s)×
×
f
1
θ
1
(s)
f
2
θ
2
(s)
f
1
θ
1
(s)
f
2
θ
2
(s) −
π
2
−
−ϕ
θ
1
(s) − θ
2
(s)
ds.
Denote by m ∈ N ∪{0} a natural number such that t ∈
[mδ,(m+ 1)δ]. From (3) we have m < T/δ+1. Func-
tion γ(t) is continuous and, therefore, it is bounded
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
558

on [0,T], f
1
(θ), f
2
(θ),ϕ
θ
are also bounded on R.
Then
(m+1)δ
R
t
γ(t − s) f
1
θ
1
(s)
f
2
θ
2
(s)
×
× f
1
θ
1
(s)
f
2
θ
2
(s) −
π
2
ds = O(δ),
(m+1)δ
R
t
γ(t − s)ϕ
θ
1
(s) − θ
2
(s)
ds = O(δ)
and g(t) − G(t) can be rewritten as
g(t) − G(t) =
m
∑
k=0
R
[kδ,(k+1)δ]
γ(t − s)×
× f
1
θ
1
(s)
f
2
θ
2
(s)
f
1
θ
1
(s)
f
2
θ
2
(s) −
π
2
−
−ϕ
θ
1
(s) − θ
2
(s)
ds+ O(δ).
(8)
Since (5), it follows that on any interval [kδ,(k+
1)δ] we have
γ(t − s) = γ(t − kδ) + O(δ),
t > s, s ∈ [kδ,(k+ 1)δ].
(9)
where O(δ) is independent of k. Then by (8), (9) and
the boundedness of f
1
(θ), f
2
(θ),ϕ
θ
we get
g(t) − G(t) =
m
∑
k=0
γ(t − kδ)
R
[kδ,(k+1)δ]
f
1
θ
1
(s)
f
2
θ
2
(s)
f
1
θ
1
(s)
f
2
θ
2
(s) −
π
2
−
−ϕ
θ
1
(s) − θ
2
(s)
ds+ O(δ).
Denote θ
p
k
(s) = θ
p
(kδ) +
˙
θ
p
(kδ)(s− kδ), p ∈ {1, 2}.
By (4) with s ∈ [kδ,(k + 1)δ] we obtain θ
p
(s) =
θ
p
k
(s) + O(δ). Since ϕ
θ
is bounded and continuous
on R, by (2) we have
Z
[kδ,(k+1)δ]
|ϕ
θ
1
(s)−θ
2
(s)
−ϕ
θ
1
k
(s)−θ
2
k
(s)
|ds=O(δ
2
).
The function f
2
(θ) is smooth while the function
f
1
(θ) is partially-differentiable and bounded. If f
1
(θ)
is continuous on R, then
R
[kδ,(k+1)δ]
f
1
(θ
1
(s)) f
2
(θ
2
(s)) f
1
θ
1
(s)
×
× f
2
θ
2
(s) −
π
2
ds =
=
R
[kδ,(k+1)δ]
f
1
θ
1
k
(s)
f
2
θ
2
k
(s)
f
1
θ
1
k
(s)
×
× f
2
θ
2
k
(s) −
π
2
ds+ O(δ
2
).
(10)
Considering sets (10) outside of small neighbour-
hoods of discontinuity points and using (1)–(5), the
proof of theorem is completed.
3.2 Example
Consider a triangular signal (Fig. 4)
f
1
(t) =
8
π
2
∞
∑
l=1
(−1)
l−1
(2l − 1)
2
sin
(2l − 1)θ
1
(t)
.
Then
1
-1
t
f (t)
1
Figure 4: Triangular signal.
ϕ(θ
1
− θ
2
) =
8
π
4
− sin(2θ
1
− 2θ
2
)+
+2
∞
∑
l=1
1
(2l−1)
2
(2l+1)
2
sin(2θ
1
− 2θ
2
)
.
By 2
∞
∑
l=1
1
(2l−1)
2
(2l+1)
2
=
π
2
8
− 1 we finally get
ϕ(θ
1
− θ
2
) =
1
π
2
−
16
π
4
sin(2θ
1
− 2θ
2
).
4 PHASE-FREQUENCY MODEL
From Theorem 1 it follows that the block-scheme of
Costas loop in signal space (Fig. 1) can be asymptot-
ically changed (for high-frequency generators) by the
block-scheme in frequency and phase space (Fig. 5).
Here PD is a phase detector with corresponding char-
acteristic computed above.
Figure 5: Phase-locked loop with phase detector.
ACKNOWLEDGEMENTS
This work was supported by Academy of Fin-
land, Ministry of Education & Science and Saint-
Petersburg State University (Russia).
REFERENCES
Abramovitch, D. (2002). Phase-locked loops: A control
centric tutorial. In Proceedings of the American Con-
trol Conference, volume 1, pages 1–15.
NonlinearAnalysisofCostasLoopCircuit
559

Bragin, V. O., Vagaitsev, V. I., Kuznetsov, N. V., and
Leonov, G. A. (2011). Algorithms for finding hid-
den oscillations in nonlinear, systems. the Aizerman
and Kalman conjectures and Chua’s circuits. Jour-
nal of Computer and Systems Sciences International,
50(4):511–543.
Costas, J. (1956). Synchoronous communications. In Proc.
IRE, volume 44, pages 1713–1718.
Gardner, F. (1966). Phase–lock techniques. John Wiley,
New York.
Gubar’, N. A. (1961). Investigation of a piecewise lineardy-
namical system with three parameters. J. Appl. Math.
Mech., (25):1519–1535.
Kroupa, V. (2003). Phase Lock Loops and Frequency Syn-
thesis. John Wiley & Sons.
Kuznetsov, N., Leonov, G., and Seledzhi, S. (2009a). Non-
linear analysis of the costas loop and phase-locked
loop with squarer. In Proceedings of the IASTED In-
ternational Conference on Signal and Image Process-
ing, SIP 2009, pages 1–7.
Kuznetsov, N., Leonov, G., Seledzhi, S., and Neittaanm¨aki,
P. (2009b). Analysis and design of computer ar-
chitecture circuits with controllable delay line. In
ICINCO 2009 - 6th International Conference on
Informatics in Control, Automation and Robotics,
Proceedings, volume 3 SPSMC, pages 221–224.
doi:10.5220/0002205002210224.
Kuznetsov, N., Leonov, G., Yuldashev, M., and Yulda-
shev, R. (2011a). Analytical methods for computa-
tion of phase-detector characteristics and pll design.
In ISSCS 2011 - International Symposium on Sig-
nals, Circuits and Systems, Proceedings, pages 7–10.
doi:10.1109/ISSCS.2011.5978639.
Kuznetsov, N., Neittaanm¨aki, P., Leonov, G., Seledzhi,
S., Yuldashev, M., and Yuldashev, R. (2011b).
High-frequency analysis of phase-locked loop and
phase detector characteristic computation. In
ICINCO 2011 - Proceedings of the 8th Interna-
tional Conference on Informatics in Control, Au-
tomation and Robotics, volume 1, pages 272–278.
doi:10.5220/0003522502720278.
Kuznetsov, N. V., Leonov, G. A., and Seledzhi, S. S.
(2008). Phase locked loops design and analy-
sis. In ICINCO 2008 - 5th International Con-
ference on Informatics in Control, Automation and
Robotics, Proceedings, volume SPSMC, pages 114–
118. doi:10.5220/0001485401140118.
Leonov, G. A., Bragin, V. O., and Kuznetsov, N. V. (2010a).
Algorithm for constructing counterexamples to the
Kalman problem. Doklady Mathematics, 82(1):540–
542.
Leonov, G. A. and Kuznetsov, N. V. (2011). Algorithms
for searching hidden oscillations in the Aizerman and
Kalman problems. Doklady Mathematics, 84(1):475–
481.
Leonov, G. A., Kuznetsov, N. V., and Kudryashova, E. V.
(2008). Lyapunov quantities, limit cycles and strange
behavior of trajectories in two-dimensional quadratic
systems. Journal of Vibroengineering, 10(4):460–467.
Leonov, G. A., Kuznetsov, N. V., and Vagaitsev, V. I.
(2011a). Localization of hidden Chua’s attractors.
Physics Letters A, 375(23):2230–2233.
Leonov, G. A., Kuznetsov, N. V., Yuldashev, M. V., and Yul-
dashev, R. V. (2011b). Computation of phase detector
characteristics in synchronization systems. Doklady
Mathematics, 84(1):586–590.
Leonov, G. A., Seledzhi, S. M., Kuznetsov, N. V., and
Neittaanmaki, P. (2010b). Asymptotic analysis of
phase control system for clocks in multiprocessor ar-
rays. In ICINCO 2010 - Proceedings of the 7th
International Conference on Informatics in Control,
Automation and Robotics, volume 3, pages 99–102.
doi:10.5220/0002938200990102.
Leonov, G. A., Vagaitsev, V. I., and Kuznetsov, N. V.
(2010c). Algorithm for localizing Chua attractors
based on the harmonic linearization method. Doklady
Mathematics, 82(1):693–696.
Lindsey, W. (1972). Synchronization systems in communi-
cation and control. Prentice-Hall, New Jersey.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
560
