
Design of Human-computer Interfaces in Scheduling Applications
Anna Prenzel and Georg Ringwelski
Hochschule Zittau / Görlitz, Department of Electrical Engineering and Computer Science,
Obermarkt 17, 02826, Görlitz, Germany
Keywords: Human Factors, Planning and Scheduling, Decision Support System, Automation, Interactive Scheduling.
Abstract: There are many algorithms to solve scheduling problems, but in practice the knowledge of human experts
almost always needs to be involved to get satisfiable solutions. In this paper, we describe a set of decision
support features that can be used to improve human computer interfaces for scheduling. They facilitate and
optimize human decisions at all stages of the scheduling procedure. Based on a study with 35 test subjects
and overall 105 hours of usability testing we verify that the use of the features improves both quality and
practicability of the produced schedules.
1 INTRODUCTION
Scheduling solutions to support human decisions are
widely asked for in several application domains.
Very often these solutions turn out in practice to
work as sociotechnical or mixed initiative systems.
Numerous (human) agents and stakeholders as well
as software systems are involved in decision making
(Burstein and McDermott, 1997), (Wezel et al.,
2006).
Problem Description. In this paper we focus
practical scheduling problems. A fleet scheduling
system serves as an example. It is to be included in
an information system for water suppliers. The final
product is sold to several companies, which have
similar, but never uniform problems and workflows.
The customers require interactive scheduling
features including
• adapting schedules during execution due to
accidents that must be resolved immediately
• adapting future schedules due to expert
knowledge which was not included in the model a
priori
• allowing manual adaptation in order to evaluate
different scenarios for parts of a future schedule.
Another problem is the acceptance of the product
by end-users. In interviews with human schedulers
we have observed that
• they fear that a system could replace their work
and are reluctant to accept push-the-button-
optimizers
• consequently they tend to find problems in the
produced schedules, which can hardly be solved a
priori through better modeling
• it is inevitable that expert knowledge on the
scheduling process is maintained in a company.
From this point of view we must find appropriate
ways to incorporate human factors in the computer-
supported scheduling process.
Contribution. In order to target these
requirements we define several human-computer
interaction models based on an analysis of human
decision-making. They can be distinguished by their
level of automation that varies between manual and
fully automatic.
• We deduce a set of decision support (DSS)
features from this analysis that can be combined to
different human-computer interaction models.
• We show that human operators should be able
to choose the level of automation for each
scheduling problem individually.
• We compare the models based on an empirical
study we carried out in 105 hours of usability
testing with 35 test subjects. Our study shows that
the quality of the produced schedules correlates
with use and availability of the regarded features.
219
Prenzel A. and Ringwelski G..
Design of Human-computer Interfaces in Scheduling Applications.
DOI: 10.5220/0003987402190228
In Proceedings of the 14th International Conference on Enterprise Information Systems (ICEIS-2012), pages 219-228
ISBN: 978-989-8565-10-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 A SHORT INTRODUCTION
INTO PRACTICAL
SCHEDULING
2.1 The Common Structure of
Scheduling Problems
The main concern of scheduling is the assignment of
jobs to resources. Jobs are services that must be
carried out by the resources, for example, items for
production, items for transport or shifts in a hospital.
Machines, vehicles and employees can be
considered as resources. Scheduling systems are
expected to solve combinatorial problems such as
finding sequences or start times of jobs, good
resource utilization, minimal makespan and many
more. Solving these problems is complex (often NP-
complete) because solutions have to satisfy
numerous constraints including
Start Time Constraints:
For individual jobs, such as “each job has a time
window that restricts earliest and latest possible start
time”.
Among several jobs, such as “jobs must not overlap
in time if they are assigned to the same resource”.
Resource Constraints:
For individual jobs, such as “each job has a set of
resources it can be assigned to”.
Among several jobs, such as “a limited set of
resources can be used at a time”.
Our case study in fleet scheduling is based on a
formal model described by Kallehauge, Larsen,
Madsen and Solomon (2005). In addition to meeting
the constraints the goal of scheduling is to keep costs
low and to minimize the execution time. The
calculation of the costs is again application-specific.
The objective functions of our fleet scheduling
system are:
a) The total travel time between each two jobs in
the schedule (cost function)
b) The time between the beginning of the first and
the end of the last job in the schedule (execution
time)
The latter also addresses the common
requirement of balancing the workload of the
resources. Scheduling aims to find an arrangement
of jobs that optimizes the current objective values
and provides a good tradeoff between them.
2.2 Preferences and Modifications
We have gathered information about scheduling
issues in several projects with domain experts in
scheduling. Each company has its specific technical
requirements on their schedules. For example, a
manufacturing company will define the sequence, in
which items are processed on the assembly line. The
individual start time and resource constraints reflect
the physical conditions of the production system and
thus have to be enforced as hard constraints.
However, the dispatchers also know the criteria
that make their schedules practicable or
impracticable and prefer certain schedules over
others. Their preferences arise from dynamic
changes in the operational requirements. Consider
the following types of preferences:
Start Time Preferences: “start this job not until
10 o’clock”; “start this job as early as possible”
Resource Preferences: “use resource X (not) for
this job”; “use only half of the jobs for this resource”
Optimization Preferences: “reduce the travel
time for this resource”; “reduce the overall execution
time”; “change the weight of this objective function”
Preferences like these are based on the
experience of the human operators in their field of
work (Fransoo et al., 2011). They have an idea of
what an “optimal” schedule looks like in a particular
situation. This also means that they are able to find
optimization preferences in automatically produced
schedules. In the most cases it is not obvious how to
set the weight of multiple optimization goals in
advance of the scheduling. Therefore humans derive
them from existing schedules and use them for
subsequent adaptations of parts or the whole
schedule.
In contrast to the hard constraints preferences
include some uncertainty. It is not clear from the
start whether and to what extent they can be
incorporated. This depends on the impact they have
on the overall schedule and particularly on how
much the remaining jobs are changed. For example,
if a preference is known before scheduling, the
remaining jobs can be scheduled within the bounds
of their hard constraints. However, this is more
complicated, if the preference is applied to an
existing schedule which only allows partial changes.
In addition to preferences subsequent
modifications of schedules play a big role in
practical scheduling as well. For different reasons
there might be unanticipated changes to schedules
being carried out. For example, a schedule has to be
adapted if a resource breaks down or a new job has
to be included in case of an event. Again, there
might be preferences about the best way to perform
modifications.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
220
2.3 Abstraction Levels of Scheduling
Actions
Human operators tend to have an intuition about
how to adapt a schedule such that a preference is
considered. They use mental models containing as
much details of the system as needed to plan the
scheduling actions that lead to the desired state of
the schedule (St-Cyr and Burns, 2001), (Wezel et al.,
2006), and (Turban et al., 2010). The possible levels
of detail a schedule provides can be represented in
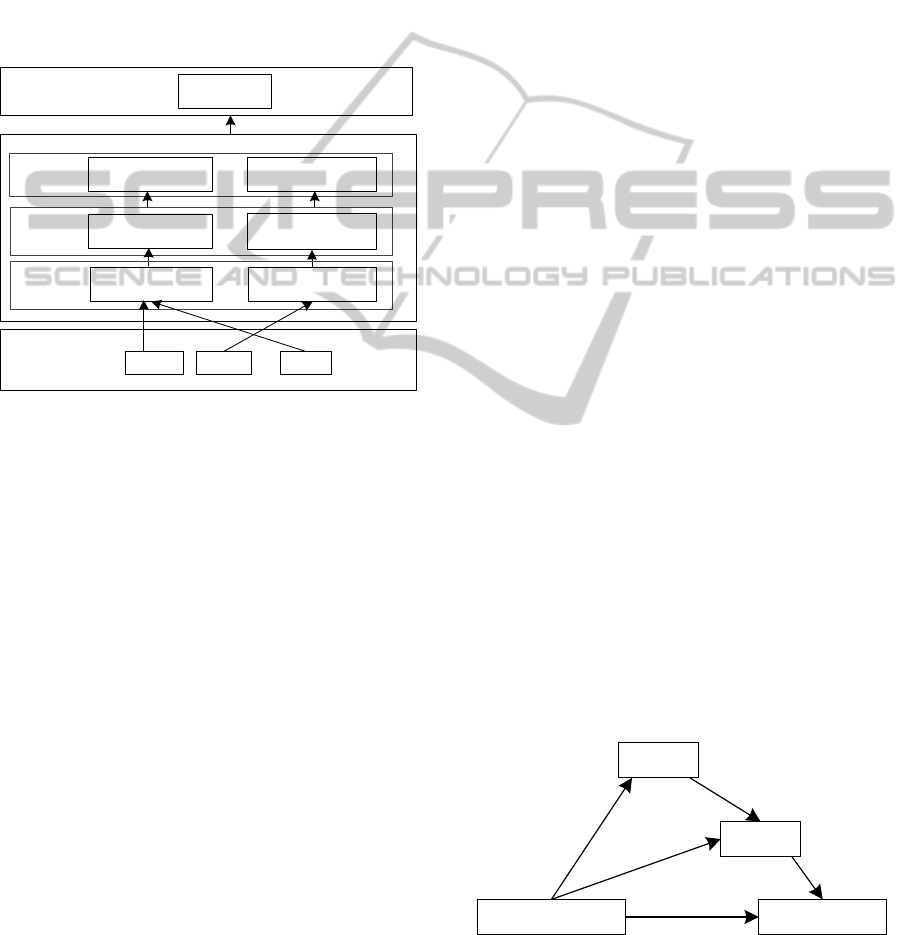
an abstraction hierarchy.
TOTAL COST
JOBS
RESOURCE 1
...
JOBS
RESOURCE
R
ORDER OF JOBS
RESOURCE 1
...
ORDER OF JOBS
RESOURCE R
...
JOB 1 JOB 2 JOB N
Schedule
Resources
Assignment
Sequencing
Jobs
Level1
Level2
Level3
COST RESOURCE 1
...
COST RESOURCE R
Quality
Figure 1: Abstraction levels for scheduling tasks.
The hierarchy we chose is shown in Figure 1.
From top to bottom, it reveals different levels of
detail of a general schedule. At level 1 the only
information used is the objective value of the overall
schedule. The underlying level 2 reveals details of
the sub-schedules for each resource including the
assignment of jobs to vehicles and, zooming in
further, the order of the particular jobs. The lowest
level 3 contains the individual jobs that hold their
start times and resources as properties.
A scheduling action at a certain level can be
defined without information of the underlying levels.
Consider for instance the goal of changing the
resource affiliation of a job. It is irrelevant for the
human operator where the job is positioned within
the sequence of jobs or at which time it starts.
However, for the preference to take effect a decision
about the start time has to be made in order to obtain
a schedule that does not violate any hard constraints.
That means, the level a preference targets and the
level at which it is implemented can be different. We
describe this with the term “loss of abstraction”.
3 INVESTIGATING THE HUMAN
CONTRIBUTION TO
SCHEDULING
Manual optimization of schedules is a monotonous
job unsuitable for humans (Burstein and Holsapple,
2008). Due to the structure of the problems the
number of valid positions for jobs is exponential
(Burke and Kendall, 2005) which makes it difficult
for the human to find the optimal costs. In contrast,
it is important for the user to collect and interpret the
data of schedules to find preferences and
modifications. Having identified them, he
participates in the adaptation of the schedule.
3.1 Making Decisions
The decisions about how identified preferences and
modifications are incorporated should be left to the
human in order to prevent problems of the kind we
have described in section 1.
3.1.1 Decision-making in General
Scheduling can be modeled as decision process
(Higgins, 1999) consisting of intelligence, design
and choice (Turban et al., 2010). The intelligence
phase involves the recognition of the problem at the
start of the decision process. After that, possible
solutions are evaluated in the design phase. The best
alternative is finally selected in the choice step. We
add a completion step, if the selected solution yet
has to be completed. If the completion step is still
complex, a new decision process is triggered. The
decision processes are chained that way until the
task is accomplished.
The decision process is influenced by skills and
knowledge of the human. We distinguish skill-based
(SBB), rule-based (RBB) and knowledge-based
reasoning (KBB) (Rasmussen, 1983). As shown in
Figure 2 RBB and SBB shorten the decision process.
INTELLIGENCE
DESIGN
CHOICE
SBB
COMPLETION
R
B
B
KBB
Figure 2: Stages in decision-making and shortcuts.
DesignofHuman-computerInterfacesinSchedulingApplications
221
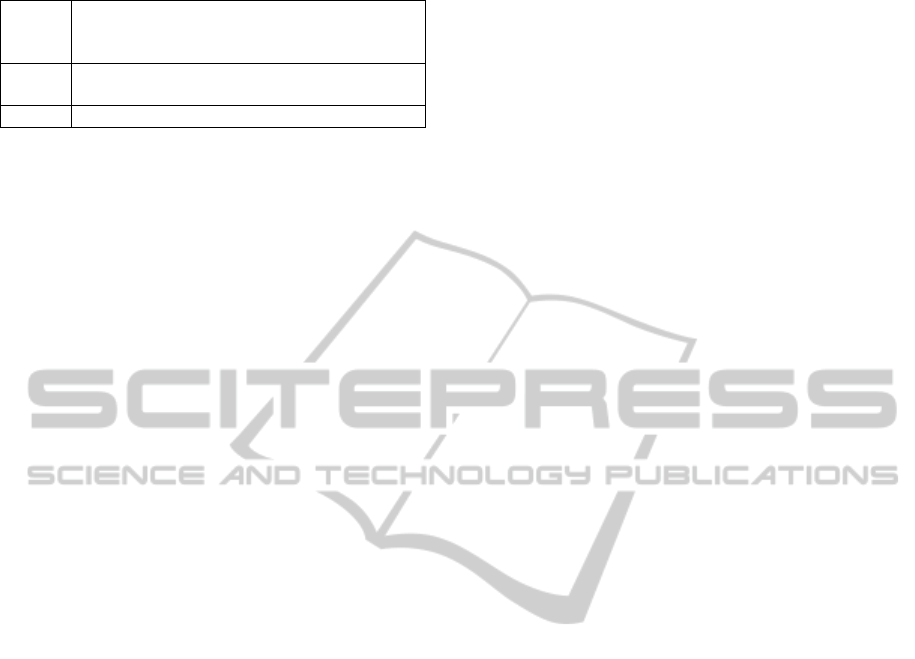
Table 1: Types of reasoning.
KBB No pattern can be used. Intelligent reasoning
is required. KBB coincides with the design
phase.
RBB Familiar patterns in the data map to a rule that
implies the action.
SBB Perception is mapped to action directly.
3.1.2 Decision-making in Scheduling
The decision stages can be directly applied to human
scheduling activities.
Design: In the design stage the human operator
compares alternative solutions for the task.
Depending on the abstraction level this involves
comparing
• different schedules (level 1)
• different assignments of jobs to resources(level 2 )
• different orders of jobs within a resource (level 2)
Each considered alternative is evaluated with regard
to optimality and practicability.
However, only valid schedules can be evaluated.
Due to the earlier mentioned “loss of abstraction”
the human operator has to make decisions about the
details below the abstraction level of the task. This
leads to a new decision process in order to find a
valid implementation of the solution to be
considered. The original decision process is
compromised, as the human must keep track of
nested design stages at different levels.
Choice and Completion: The human operator
chooses the best suited schedule. If complete
schedules are compared in the design stage the
completion step can be omitted.
It depends both on the experience of the human
operator and on the characteristics of the task
whether the decision process can be shortened by
SBB or RBB.
SBB: The scheduling task is a pure optimization
of cost functions if no alternative solutions exist or if
the preference is formulated as a hard constraint.
Furthermore, typical modifications such as the
addition of jobs sometimes do not require an
evaluation in terms of practicability but only in
terms of optimality and thus are skill-based.
RBB: Applies, if the human operator deals with
the task repeatedly or if there are best practices, such
that the best suited alternative is known from
experience. The human operator has to implement
the chosen alternative in the completion step.
4 DESIGN OF INTERACTIVE
SCHEDULING INTERFACES
4.1 Hypothesis for Optimal Decision
Support
It is an important issue for decision support to keep
the human operator at the level of abstraction, that is
related to his preference and to the current type of
reasoning. For SBB and RBB the computer can
undertake the whole work of optimizing at level 1.
In KBB the scheduler should be able to test the
outcome of decisions in the design phase while
disregarding low-level constraints. To overcome the
loss of abstraction the system has to provide the
level of automation, that is needed for a particular
action.
We define the levels of automation according to
the levels of abstraction shown in Figure 2.
Level 3: This level requires the least amount of
automation, as the human operator undertakes all
decisions about start times, orders, resources and
other properties of jobs. However, to prevent faulty
decisions, the system should supervise the
compliance with the underlying constraints. In doing
so it is not sufficient to show an error message as
soon as a constraint is violated. We rather suggest to
visualize the scope of action already when the
human is about to make a decision. According to the
types of constraints in section 2.1 this means
highlighting valid properties for the considered job
that
a) meet its individual constraints
b) meet its constraints in relation to other jobs
with regard to the state of the current schedule. This
way the human does not have to make the effort to
withdraw a faulty decision.
Level 2: The human makes decisions on some
selected properties of either individual jobs or the
schedule only. The computer is required to solve the
remaining properties such that
a) all constraints are satisfied
b) the schedule is optimal or at least good with
regard to the cost function.
This is especially important for KBB, as it allows
the human operator to try and evaluate several
assignments that are based on his manual decision.
The portion of work of the computer increases with
the sublevels as shown in Table 3. At the quality
sublevel the human defines the cost function for the
scheduling of one or more jobs. In case all jobs are
chosen the decision support is equal to level 1.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
222
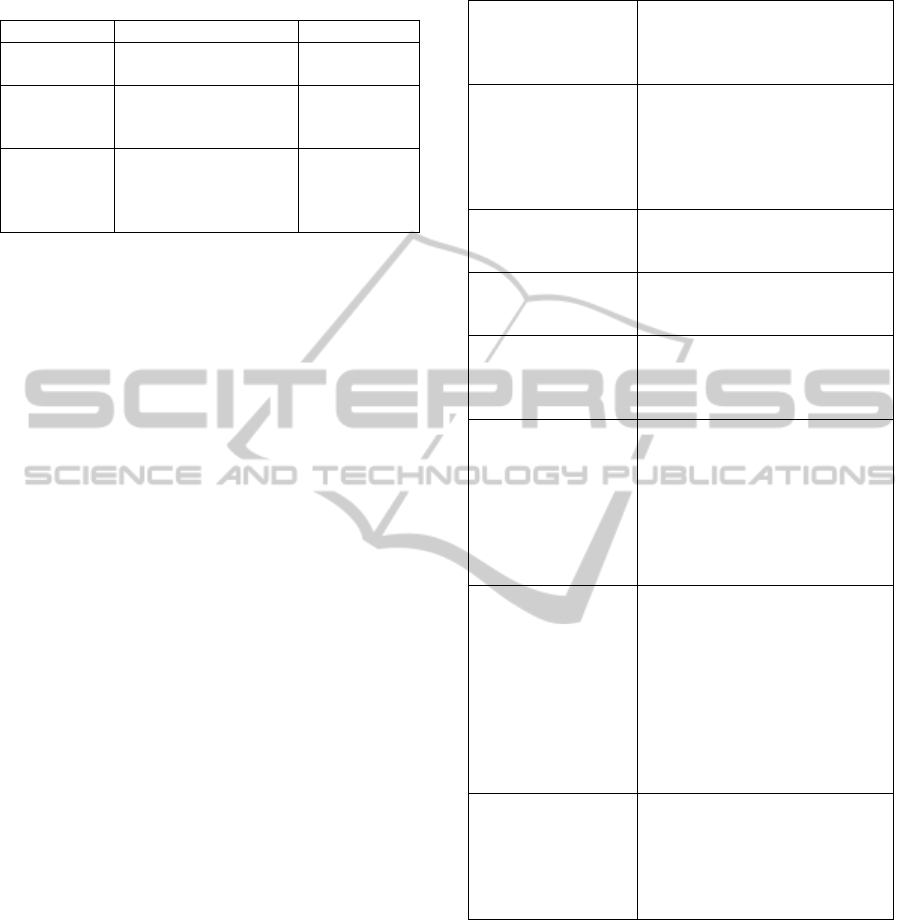
Table 2: Properties assigned by human and computer at
different sublevels of level 2.
Sublevel Human Computer
Sequencing
resource, relative
position, cost function
start time
Assignment
resource, cost
function
relative
position, start
time
Quality cost function
resource,
relative
position, start
time
Level 1: Full automation is applied at this level. The
human operator is only concerned about the cost
function the computer should use to optimize the
whole schedule.
To sum up, the human operator decides, how
much details he contributes to a change of the
schedule.
4.2 Interactive Decision Support
Features
We have designed a set of interaction features that
can be used to build a scheduling interface providing
the recommended decision support. They are
described in Table 4. We neglect commonly used
features like Undo/Redo, as they can be found in the
standard literature about successful user interface
design (Shneidermann, 2010).
At level 3 we use colors to visualize the domain
of the property of a job in the current schedule. For
level 2 we suggest the use of controls that allow the
human operator to select a group of jobs for
optimization. This is a simple way to deal with
optimization preferences, as different objective
functions can be chosen for different groups. The
FO-feature is suited for tasks at level 1.
Fixation covers all three levels. It is the
prerequisite for all other features, as it deals with the
way the human operator enters a condition for a
certain property in the interface. Having done this
the computer considers the condition in optimizing
or constraint highlighting. Properties that are not
fixed to a certain value can be automatically
resolved with level 2 and level 1 features.
Furthermore, fixation allows keeping decisions
made at lower levels when using features at higher
levels. For example, if the human operator modifies
some jobs with the help of ECH and FIT, he can fix
their properties at level 3. If FO is applied
afterwards, the modified jobs are not changed
anymore. Figure 3 shows the abstraction levels the
features belong to.
Table 3: Decision support features.
Full Optimization
(FO)
A control to optimize the whole
schedule. It allows choosing
from various built-in cost
functions.
Single Job
Optimization (SJO)
The interface allows to select a
single job in the schedule and
triggers automatic optimization
of its position. Remaining jobs
in the schedule are kept
unchanged.
Resource
Optimization (RO)
Like SJO. All jobs belonging to
the same resource can be
selected at once.
Group Optimization
(GO)
Like SJO. Any group of jobs
from different resources can be
selected.
Fit-in (FIT)
The interface allows the user to
define the position of a job
within the sequence and looks
for a valid start time.
Constraint
Highlighting (CH)
The interface recognizes the
intention to change a property
of a job and colors possible
values
red, if they are invalid
green, if they are valid
with regard to constraints of the
individual job.
Enhanced
Constraint
Highlighting (ECH)
Additional to CH: values of
properties, that violate
constraints in relation to other
jobs are colored
yellow, if the value can be
applied as soon as the properties
of conflicting jobs are adapted
grey, if the value can never be
applied in conjunction with the
conflicting jobs.
Fixation (FIX)
The interface allows the direct
input of the desired properties
of one or more jobs. They are
turned into additional
constraints to be considered by
all features.
4.3 Example Interfaces
Our hypothesis does not include recommendations
about how to support the identification of
preferences and modifications. This is an issue for
the graphical information visualization of the
specific scheduling application. It should follow the
principles of Ecological Interface Design (Vicente,
2002), (Vicente and Rasmussen, 1992) and display
information according to the abstraction hierarchy.
We show two example interfaces that include our
recommended DSS features.
DesignofHuman-computerInterfacesinSchedulingApplications
223
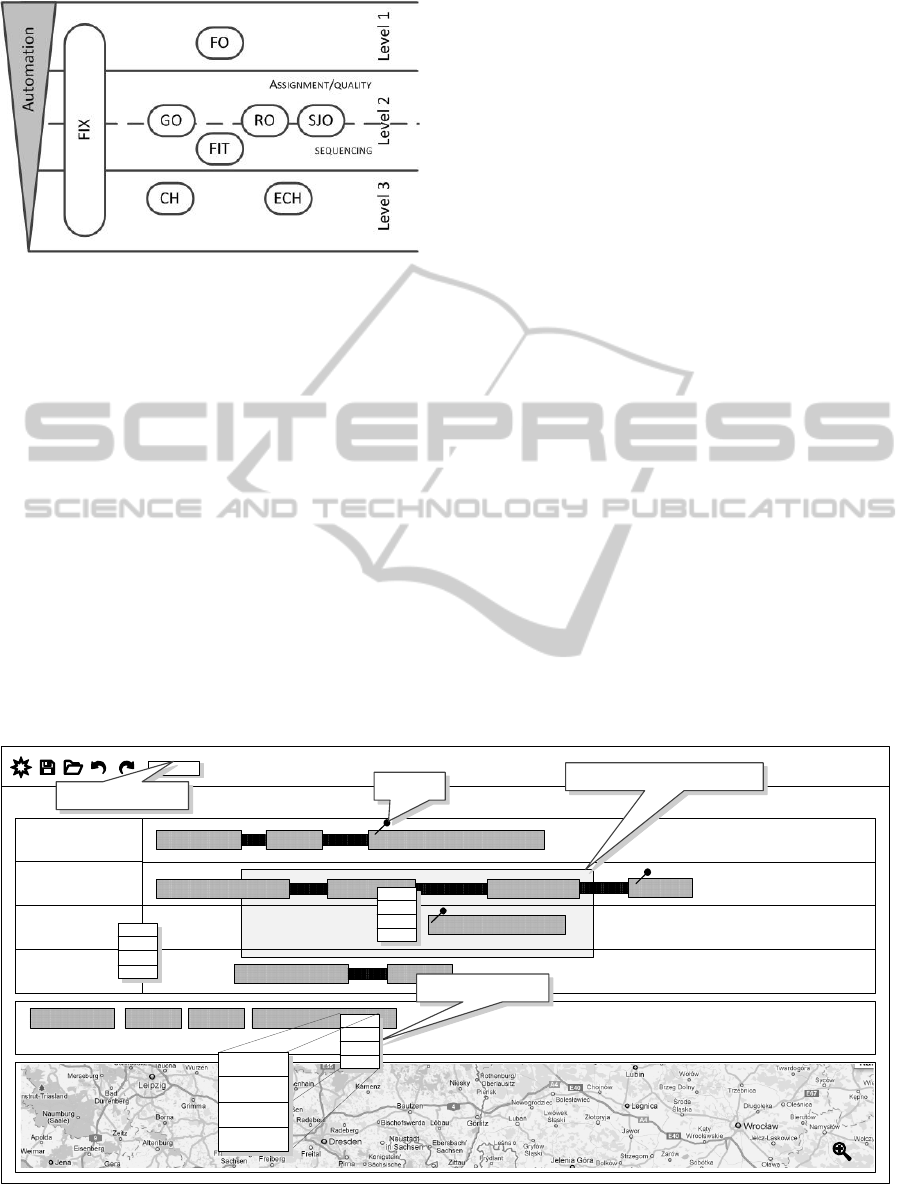
Figure 3: DSS features at different abstraction levels.
4.3.1 Fleet Scheduling
The interface used in our experiments is sketched in
Figure 4. We decided to use a Gantt chart, as it
clearly shows the sequence of jobs in time and the
travel times between them. This makes it easy to
analyze start times and resources of jobs in order to
derive certain preferences. For further support we
provide a map.
The human operator can move the jobs per Drag
and Drop. If he starts dragging constraint
highlighting is applied to the Gantt chart: the colors
of the positions show whether there are time window
conflicts or overlaps with other jobs in case the job
is dropped there. A job can be dropped at any
position colored green or yellow, in the latter case
the fit-in feature can be used to put the job correctly
in the sequence.
Furthermore SJO, RO and GO are available
through context menus and provide the two cost
functions introduced in section 2.1. Scheduling
preferences can be defined in property dialogs and
by using the pin (FIX) that fixes both start time and
resource of a job. A button to create schedules from
scratch (FO) is also provided.
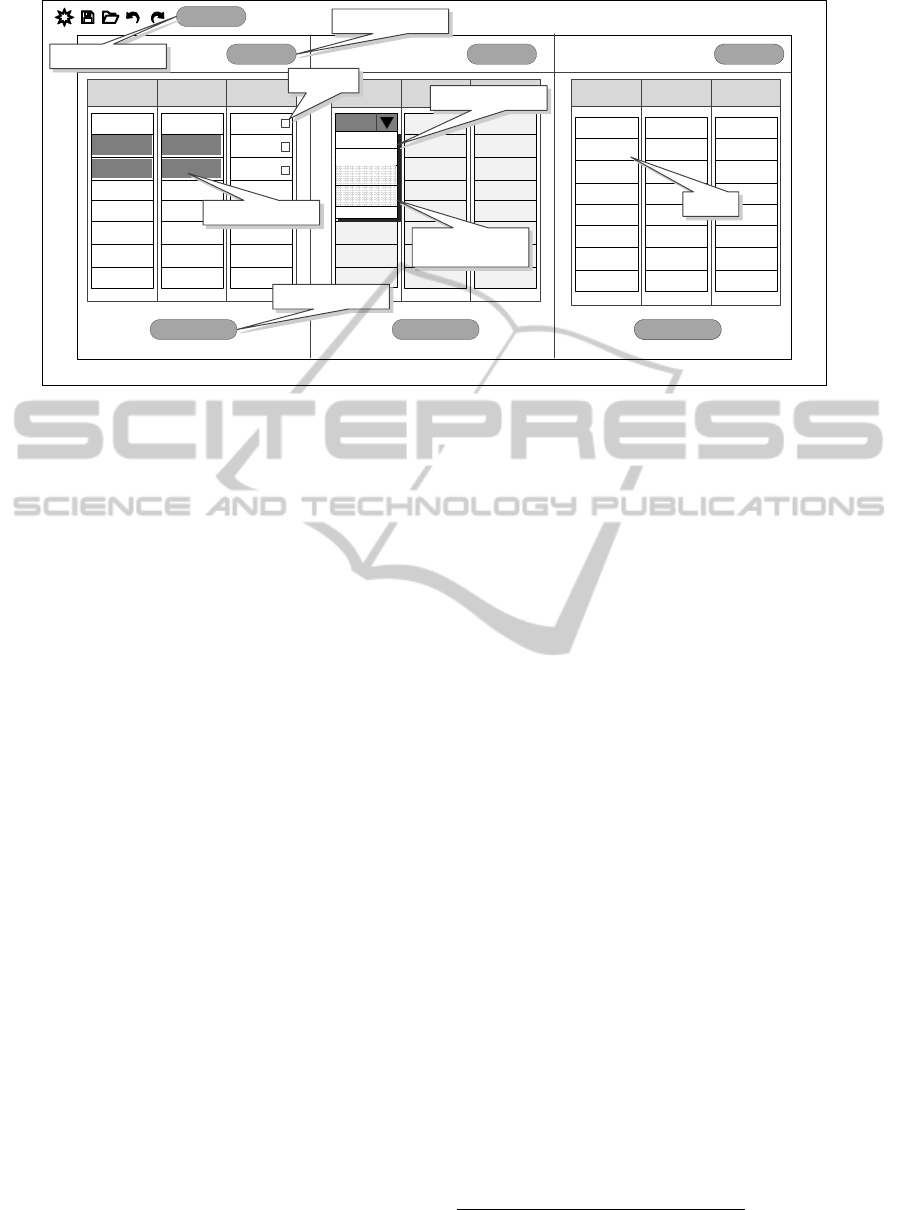
4.3.2 Nurse Rostering
A possible interface for nurse rostering is shown in
Figure 5. In contrast to the vehicle routing interface
the jobs are not grouped by their resource (nurse),
but by the shift they belong to. Each shift requires a
certain number of nurses which corresponds to the
number of jobs that must be included. The cost
function usually deals with considering the
preferences of the individual nurses.
The start time of a shift determines the start
times of the associated jobs. Their resources can be
chosen from a drop-down menu, whose entries are
colored according to CH and ECH. For example, if a
nurse had a night shift the day before it must not be
assigned to the early shift due to legal requirements.
However, if the selection of this nurse is colored
yellow, the human operator is able to ask the system
to reschedule the day before such that the early shift
becomes valid. Furthermore the interface contains
features to select a group of jobs (SJO, GO) or the
whole schedule (FO) for automatic optimization. In
this case fixed nurses (FIX) are kept unchanged.
VEHICLE 1
VEHICLE 2
VEHICLE 3
VEHICLE 4
MAP
CLIPBOARD
GANTT CHART
GROUPING OF JOBS
FIXATION
CONTEXTMENUS
OPTIMIZE SCHEDULE
OPTIMIZE
FIT
‐IN
OUT
PROPERTIES
Figure 4: Interface Design for Vehicle Routing.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
224
MONDAY TUESDAY WEDNESDAY
SHIFT1 SHIFT2 SHIFT3 SHIFT1 SHIFT2 SHIFT3 SHIFT1 SHIFT3SHIFT2
NURSE 1
NURSE 4
NURSE 10
N
URSE 12
N
URSE 2
NURSE 3
NURSE 5
N
URSE 6
...
......
N
URSE 2
N
URSE 7
N
URSE 8
N
URSE 11
NURSE 1
NURSE 2
NURSE 5
NURSE 11
DROP‐DOWN MENU
CONSTRAINT
HIGHLIGHTING
GROUP SELECTION
SCHEDULE WEEK
SCHEDULE DAY SCHEDULE DAY SCHEDULE DAY
SCHEDULE SELECTION SCHEDULE SELECTION SCHEDULE SELECTION
FULL OPTIMIZATION
GROUP OPTIMIZATION
GROUP OPTIMIZATION
JOBS
X
X
X
FIXATION
Figure 5: Interface design for Nurse Rostering.
5 EVALUATION OF THE
DECISION SUPPORT
5.1 Combining DSS Features to
Interaction Models
In order to prove our claims from section 1 it
remains to provide an empirical evaluation of
a) the suitability of the features for performing
scheduling tasks at different abstraction levels
b) the quality that can be achieved in terms of the
cost function.
For this we combine DSS features to 5
interaction models located at different abstraction
levels. They are shown in Table 5.
Model 1/2: manual scheduling at level 3
Model 3: FO at level 1, subsequent manual
modifications at level 3 are allowed, fixation is not
allowed
Model 4: like model 3, fixation is allowed
Model 5: level 2, fixation can be achieved
indirectly by excluding manually positioned jobs
from optimization groups.
Several test tasks with scheduling preferences at
different abstraction levels are carried out by peer
groups. Each model is used for each task.
5.2 Setup of the Usability Test
We have formed 5 test groups each consisting of 7
students from different faculties of our institution.
The subjects were asked to perform 6 scheduling
tasks. The models available for the particular tasks
were dependent on the test group. We determine the
best model for each task by comparing the average
performance and confidence interval in the
following metrics: accumulated travel time, task
completion, time effort, number of undo operations
and number of manual interactions. The tests took 3
hours per participant including a briefing of 30
minutes at the start. The maximum duration for each
task was set to 15 minutes.
5.2.1 Design of the Test Tasks
The participants had no experiences in scheduling.
Therefore the relevant scheduling preferences that
would otherwise arise from the expert knowledge of
the scheduler had to be predefined for each task.
1. Schedule a set of jobs such that the total travel
time is minimized and the workload
1
is balanced
between the resources. For some jobs there are
precedence constraints (level 2 sequencing).
2. Schedule a set of jobs such that the total travel
time is minimized and the workload is balanced.
For some jobs fixed start times and resources are
given (level 3).
3. An additional vehicle is to be utilized. Change
the given schedule such that some suitable jobs are
assigned to it (level 2 assignment).
4. An event occurs and requires an additional job.
The working schedule must include the job as
early as possible, but it has to remain unchanged
until 10 o’clock (level 3).
1
The workload corresponds to the total number of jobs that a
resource has to carry out.
DesignofHuman-computerInterfacesinSchedulingApplications
225
5. Schedule a set of jobs such that the total travel
time is minimized and the workload is balanced.
Jobs beyond the German-Polish border must be
carried out in one piece (level 2 sequencing).
6. Change the current schedule such that vehicle 3
finishes work at 12 o’clock. Remaining jobs have
to be assigned to other vehicles (level 2
assignment).
The tasks are to be carried out with 4 vehicles
and about 25 predefined jobs. All jobs have time
window and resource constraints. The participants
always have to strive for a compromise between low
travel time and balanced workload (level 2
quality/level 1).
5.2.2 Assignment of Test Groups to
Interaction Models
The table below shows the distribution of test
persons to different models. The models are divided
into two areas: manual optimization (model 1 and 2)
and automated optimization (models 3, 4 and 5). The
participants first carried out their tasks manually and
then repeated them with the help of automatic
features.
The assignment of models to groups changes
from task to task. This ensures that each group deals
at least one time with each interaction model. We
assigned fewer participants to models that were
expected to be very difficult (model 1 and the model
without any features) or discouraging for the test
subjects.
Table 4: Example peer groups and models for task 1.
Model Features Persons
Group
(Task 1)
- - 7 1
Model 1 CH 7 2
Model 2 ECH 21 3,4,5
Model 3 FO + ECH 7 1
Model 4 FO + FIX + ECH 14 2,3
Model 5
SJO + GO + RO +
FIX + FIT + ECH
14 4,5
5.3 Results
5.3.1 Usability Metric 1: Travel Time
In Figure 9-13 the achieved qualities of the
schedules are shown for each particular task. The
average qualities are influenced by the number of
successfully completed tasks. Both task 6 and task 1
turned out to be insoluble for our testers in 15
minutes if no decision support was provided.
Consequently, we cannot present further results.
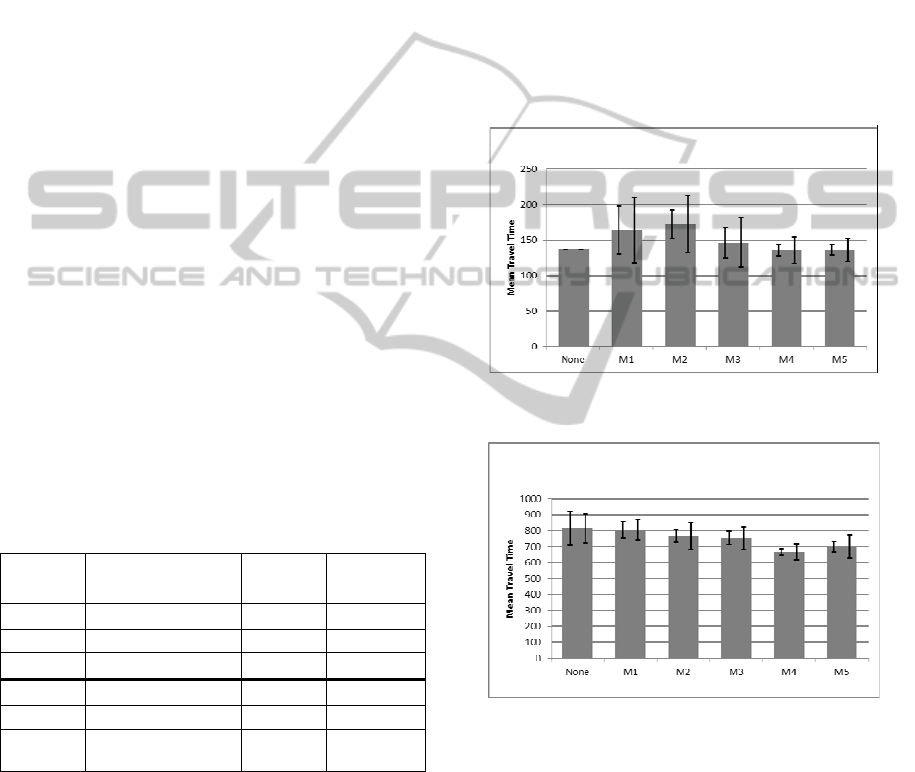
Level 3 Tasks: The results for task 2 and 4 are
shown in Figures 6 and 7. The schedules created
with level 3-features only were worse than those
created with higher-level-features. This confirms the
assumption that skill-based scheduling tasks should
be carried out by the computer. CH and ECH help
the human to find a scheduling decision for some
jobs, but are not sufficient for creating complete
schedules.
Comparing models 3 and 4, the quality decreases
if fixation is not allowed. This suggests that
preferences should be incorporated in advance (FIX)
rather than after automated optimization.
Lefterrorinterval:confidence(90%)
Righterrorinterval:standarddeviation
Figure 6: Mean travel time – task 2.
Lefterrorinterval:confidence(90%)
Righterrorinterval:standarddeviation
Figure 7: Mean travel time – task 4 (task 5 is very similar).
Level 2 Tasks: The results for tasks 1, 3, 5 and 6 are
shown in Figures 7, 8, 9 and 10. They are similar to
those for the level 3 tasks. The best schedules mostly
result from models 4 and 5. There is no significant
difference in the performance of the two models,
which applies to all test tasks too.
The overall ranking of the models is shown in
Figure 11 (1 is the best, 6 the worst rank). It
confirms the assumption that models 4 and 5
generally provide the best decision support.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
226
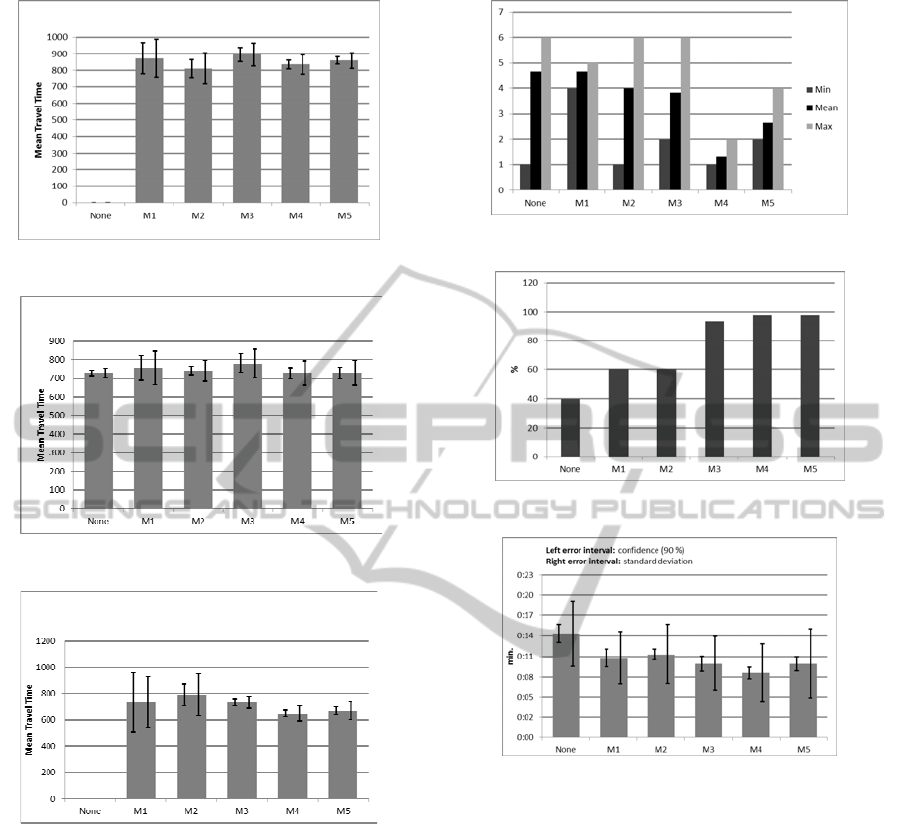
Figure 8: Mean travel time – task 1.
Lefterrorinterval:confidence(90%)
Righterrorinterval:standarddeviation
Figure 9: Mean travel time – task 3.
Left error interval: confidence
(90%) Right error interval: std.-dev.
Figure 10: Mean travel time – task 6.
5.3.2 Usability Metric 2: Task Success
The number of participants that have managed to
obtain a solution is shown in Figure 12. A task was
considered successful, if the schedule did not violate
any time window or resource constraints and the
scheduling preferences were fulfilled.
With models 1, 2 and “None” many participants
ran into dead-ends, where they were not able to
insert further jobs in the clipboard. In this case
model 2 merely depicted a grey Gantt chart
background. They would have to manually
backtrack former decisions. However, testers would
rather give up at this point.
Figure 11: Ranking of the models averaged over the tasks.
Figure 12: Rate of successful task completion.
Figure 13: Average task duration.
5.3.3 Usability Metric 3: Task Duration
The average time, users required to solve the tasks
(deadline was 15 minutes) is shown in Figure 13.
Although the time needed with no model is
particularly high, in general the models have a high
variance in their execution time. How much time a
test person spent to fulfill a task was strongly
dependent on his motivation and ideas to improve
the schedule. The runtime of the system to solve the
scheduling problem was negligible.
5.3.4 Metric 4: Interaction Frequency
Figure 14 shows the number of undo operations
averaged over the number of participants. Models 4
and 5 have a strikingly high occurrence of undo,
which refers to the general behavior in the design
phase, if there are high-level scheduling features. It
DesignofHuman-computerInterfacesinSchedulingApplications
227

consists of alternately applying and reversing
automated scheduling features until a satisficing
solution is found. Model 1 has a small peak in undo-
operations, as there is no aid to predict if an
operation will be feasible. Model 2 compensates for
this with the background-color grey.
Figure 14: Average number of undo operations.
Figure 15: Average number of manual operations.
Figure 18 shows the average number of manual
operations (drag and drop of jobs). As expected the
manual effort is the higher, the less support is
provided. However, manual scheduling is not
completely replaced by automated features, as the
user performs subsequent changes or sets certain
jobs according to his ideas.
6 CONCLUSIONS
We proposed 8 interaction features to enhance
human interaction in scheduling. These features
were evaluated in a quantitative study (usability test)
with regard to 4 relevant metrics. The results are:
1. The practicability of resulting schedules
improves with features to manually fixate, reorder
and optimize groups of jobs.
2. The success rate (solved tasks in given time) is
highly influenced by the availability of automated
scheduling features.
3. Automated scheduling features encourage the
user to explore his scope of action on the basis of
trial and error (optimize - undo).
REFERENCES
Burstein, F. and Holsapple, C. W. (Eds.). (2008).
Handbook on Decision Support Systems 1 and 2.
Springer.
Burstein, M. H. and McDermott, D. V. (1997). Issues in
the development of human-computer mixed initiative
systems. Cognitive Technology, 285-303.
Burke, E. K. and Kendall, G. (2005). Search
methodologies: introductory tutorials in optimization
and decision support techniques. Heidelberg:
Springer.
Fransoo, J. C., Waefler, T. and Wilson, J. R. (2011).
Behavioral Operations in Planning and Scheduling.
Springer.
Higgins, P. G. (1999). Job Shop Scheduling: Hybrid
Intelligent Human-Computer Paradigm. Ph.D. diss.,
Department of Mechanical and Manufacturing
Engineering, The University of Melbourne,
Melbourne, Australia.
Kallehauge, B., Larsen, J., Madsen, O. and Solomon, M.
(2005). Vehicle Routing Problem with Time
Windows. In Desaulniers, G., Desrosiers, J. and
Solomon, M. M. (Eds.), Column Generation (pp. 67-
98). Springer US.
Rasmussen, J. (1983). Skills, rules, and knowledge;
Signals, Signs and Symbols, and Other Distinctions in
Human Performance Models. IEEE Transactions on
Systems, Man, and Cybernetics, 13(3), 157-266.
St-Cyr, O. and Burns, C.M. (2001). Mental Models and
the Abstraction Hierarchy: Assessing Ecological
Compatibility. Proceedings of the Human Factors and
Ergonomics Society 45th Annual Meeting, 297-301.
Shneidermann, B. (2010). Designing the User Interface.
Pearson Addison-Wesley.
Turban, E., Sharda, R. and Delen, D. (2010). Decision
Support and Business Intelligence Systems. Prentice
Hall, Pearson.
Vicente, K. J. (2002). Ecological Interface Design:
Progress and Challenges. The Journal of the Human
Factors and Ergonomics Society, 44, 62-78.
Vicente, K. J. and Rasmussen, J. (1992). Ecological
interface design: theoretical foundations. IEEE
Transactions on Systems, Man, and Cybernetics,
22(4), 589-606.
Wezel, W., Jorna, R. and Meystel, A. (Eds.). (2006).
Planning in Intelligent Systems.Wiley Interscience.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
228
