
Proactive Monitoring of Moving Objects
Fábio da Costa Albuquerque
1,3
, Ivanildo Barbosa
1,2
, Marco Antonio Casanova
1,3
,
Marcelo Tílio Monteiro de Carvalho
3
and Jose Antonio Macedo
4
1
Departament of Informatics, PUC-Rio, Rio de Janeiro, Brazil
2
Department of Surveying Engineering, Military Institute of Engineering, Rio de Janeiro, Brazil
3
TecGraf, PUC-Rio, Rio de Janeiro, Brazil
4
Department of Computing, University of Ceará, Fortaleza, Brazil
Keywords: Moving Objects, Trajectory Analysis, Real-time Monitoring Systems, Web-based Applications.
Abstract: Positioning systems, combined with inexpensive communication technologies, open interesting possibilities
to implement real-time applications that monitor moving objects and that support decision making. This
paper first discusses basic requirements for proactive real-time monitoring applications. Then, it proposes an
architecture to deploy applications that monitor moving objects, are pro-active, explore trajectory semantics
and are sensitive to environment dynamics. The central argument is that proactive monitoring based on
process models, such as workflows, is a promising strategy to enhance applications that control moving
objects. Finally, to validate the proposed architecture, the paper presents a prototype application to monitor
a fleet of trucks. The application uses workflows to model truck trips and features a module to extract data
from the Web which helps detect changes on road conditions.
1 INTRODUCTION
Positioning systems, combined with inexpensive
communication technologies, open interesting
possibilities to implement real-time applications that
monitor moving objects and that support decision
making. An example would be an application to
monitor a fleet of tank trucks that distribute fuel to
gas stations in an urban environment. Every trip is
carefully planned to follow pre-defined routes,
avoiding sensitive areas (such as school areas) and
periods of the day or routes where the transportation
of dangerous cargo is banned and to pro-actively re-
route the truck in case of traffic accidents and other
events that might cause delays.
We may classify such applications according to
different perspectives. The application may use
trajectory semantics, such as stopping at a point of
interest, or the application may use just raw
trajectory data, such as speed and direction. We cite
Alvares (2011), Siqueira and Bogorny (2011) and
Moreno, Times, Renso and Bogorny (2010) and as
related works in trajectory semantics.
A reactive application uses just the past behavior
of the objects, as opposed to a proactive application
that features models of the predicted (future)
behavior of the objects and perhaps suggests
alternative actions. Proactive computing is
investigated in Tennenhouse (2000), which
advocates a paradigm shift from human-centered to
human-supervised computation. In his perspective, a
system to be proactive must: (1) have a direct
connection with the real world; (2) be able to
execute actions in response to external stimuli; (3)
execute actions faster than the human response. In
other words, a system with proactive behavior must
detect interesting situations before they happen and
must be able to handle such situations without
human supervision.
Finally, the application may be sensitive to
environment dynamics, meaning that it monitors the
current state of the environment (or even estimates
future states of the environment) where the object is
moving to base its decisions. Environmental facts
are considered when they directly affect the moving
object behavior. By contrast, the application may be
insensitive to environment dynamics, in the sense
that it has just a static model of the environment
(such as a road map) where the object is moving.
In this paper, we first discuss basic requirements
for proactive monitoring applications. Then, we
propose an architecture for applications that monitor
moving objects, are pro-active, explore trajectory
191
da Costa Albuquerque F., Barbosa I., Casanova M., Monteiro de Carvalho M. and Macedo J..
Proactive Monitoring of Moving Objects.
DOI: 10.5220/0003988601910194
In Proceedings of the 14th International Conference on Enterprise Information Systems (ICEIS-2012), pages 191-194
ISBN: 978-989-8565-10-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

semantics and are sensitive to environment
dynamics.
To achieve proactive behavior, the proposed
architecture includes models of the processes behind
the moving objects. The prototype application uses
workflows to model truck trips. To monitor moving
objects, the architecture includes support for real-
time trajectory data stream processing. Finally, to
account for trajectory semantics and support
sensitivity to environment dynamics, the architecture
features additional data sources, classified as
(geospatial) static structured data sources (SSD
sources) and dynamic structured data sources (DSD
sources). The prototype application uses geospatial
databases and georeferenced facts posted in feeds
and tweets about the road conditions that may affect
the predicted behavior of the trucks.
The contributions of the paper are therefore
threefold: a discussion of the basic requirements for
proactive monitoring applications; a proposal for an
architecture for such applications; and a prototype
application to assess the proposed architecture. The
central argument is that proactive monitoring based
on process models, such as workflows, is a
promising strategy to enhance applications that
control moving objects.
The rest of the paper is organized as follows.
Section 2 describes a motivating scenario. Section 3
discusses basic requirements for proactive
monitoring. Section 4 introduces an architecture for
proactive monitoring applications. Section 5
presents a prototype application to validate the ideas.
Section 6 discusses related work. Finally, Section 7
contains the conclusions.
2 A MOTIVATING APPLICATION
Consider an application to monitor a fleet of
delivery trucks, abstractly defined as follows.
Each truck is modeled as a moving object M and
each trip is described as a workflow W
M
that defines
the customers to be serviced in the trip and the
routes to be followed. Each step p of W
M
either
represents delivering merchandize at a customer C
p
located at place L
p
, or moving from a place O
p
,
called the origin of p, to a place D
p
, called the
destination of p, through a route R
p
.
For each moving object M, the system receives a
data stream containing the date, time, geographic
position and speed. The system transforms this raw
data into meaningful events with the help of a
geospatial database storing the location of points-of-
interest.
The application monitors several trucks, sharing
the same underlying road network and the same
emergency workflows. A centralized application is
desired to integrate the monitoring of the individual
trucks, as well as of the events that affect the road
network where the trucks move. The application also
reduces human interference on the monitoring
process to minimize failures due to fatigue.
Consider now the problem of improving the
truck monitoring application to become proactive
and sensitive to the environment.
Briefly, the first change in the application design
is to use the truck delivery workflows to infer their
future behavior. The second change is to detect
anomalies in the conditions of the roads where the
trucks are expected to drive in the next steps of their
trips (defined by their workflows). As an example,
the system may issue an alert to the driver to
proceed more carefully (or even to take an alternate
route) when detected that a vehicle, carrying a
flammable load, is driving along a road with wet
floor ahead.
Finally, we note that we may describe similar
scenarios related to other classes of moving vehicles,
such as planes and ships. Workflows in this case will
be abstractions for flight or sailing plans.
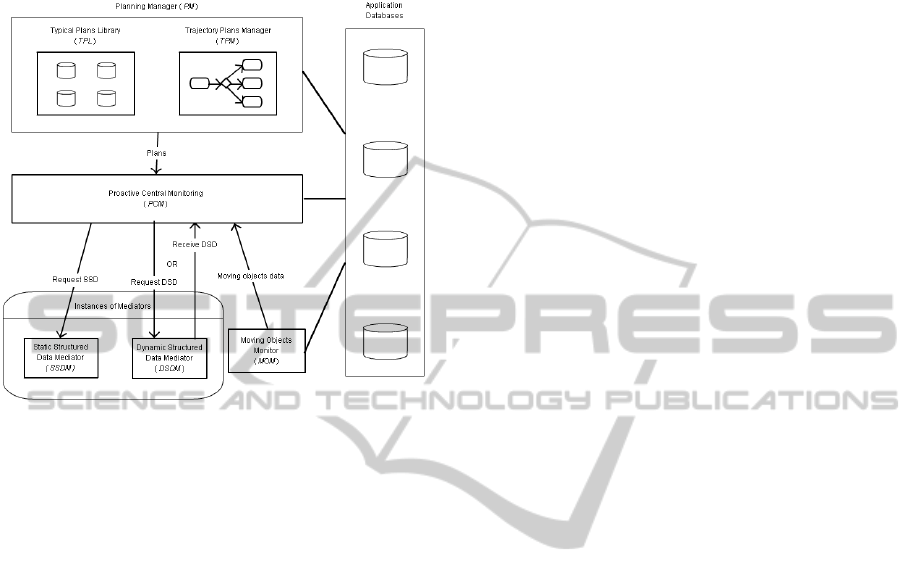
3 PROPOSED ARCHITECTURE
Figure 1 illustrates the proposed architecture. The
Proative Central Monitor (PCM) is the core
component that, as the name implies, coordinates the
other components to pro-actively monitor moving
objects. The Planning Manager (PM) stores and
controls the workflows that model the behavior of
the moving objects. The Application Databases
contain auxiliary data such as names and addresses
of customers, the road network, etc. The Moving
Objects Monitor (MOM) sends to the PCM the
structured data stream containing information
relative to the real-time monitoring of moving
objects: position, trajectory semantic data (i.e.,
interpreted trajectory data) and other signals from
moving objects. The Mediators facilitate access to
either dynamic or static external data sources.
4 A PROTOTYPE APPLICATION
This section outlines some of the features of a
prototype application to monitor a fleet of delivery
trucks, along the lines of the application presented in
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
192
Section 2. The prototype follows the architecture
proposed in Section 4 and the discussion focuses on
some aspects of the Dynamic Structured Data
Mediator and the Proactive Central Monitor.
Figure 1: General view of architecture proposal.
4.1 Dynamic Structured Data Mediator
Proactivity is two-fold: situations may be detected
from past behavior of the object or from external
agents that affect the application.
Santos and Moreira (2010) propose an input for
proactive computing by predicting the next step of
moving objects based in its current location and road
data. Previous moving object data is not used. The
success of prediction may vary according to the
scenario and variables.
The second approach to proactivity is based on
the extraction of relevant facts that potentially affect
the future behavior of moving objects.
The prototype implementation of the Dynamic
Structured Data Mediator (DSDM) uses Twitter as
the main dynamic structured data source. Similar
applications were deployed by Carvalho, Sarmento
and Rossetti (2010) and MacEachren et al. (2011).
The prototype considers tweets from a predefined
list of institutions, assessed as trustworthy sources,
as well as from users related to the primary sources
(e.g. followers).
The implementation follows the second strategy
listed in Section 4.2, that is, the DSDM is
responsible for post-processing the results returned
by the wrappers. As illustrated in Figure 2, the
DSDM receives raw data containing text body,
source, user, location (when available), number of
re-tweets, hashtags and time stamp. It then filters
tweets according to their creation date and keeps
only the most recent ones. At the classification step,
the DSDM selects only the text body and the source.
It classifies tweets according to the occurrence of
relevant facts in the text body (e.g. car crashes,
floods and road blocks). After filtering the relevant
tweets, the DSDM extracts the spatial reference for
the reported fact, with the help of a street gazetteer
stored in the SSDM. Finally, the DSDM transforms
the extracted data into a predefined structure before
sending the data to the PCM.
4.2 Proactive Central Monitor
The prototype implementation of the Proactive
Central Monitor (PCM) processes facts and events it
receives from the DSDM and the MOM as follows.
For each moving object M, with workflow W
M
,
the PCM uses the events the MOM sends to monitor
the step c that W
M
is executing. It then simulates the
steps of W
M
that may follow c, up to a certain depth,
and collects the routes that M may traverse.
Next, the PCM verifies if such routes are
affected by a fact that the DSDM has already sent. If
this is the case, the PCM warns the (human)
controller or the driver, or both, that future steps
planned for M may have to be changed or aborted.
For simple facts, the PCM just generates
warnings both to the controller and the driver, but it
does not recommend that W
M
be necessarily
changed. For example, a fact reporting heavy traffic
in a route generates just a delay warning to the
driver or even suggests an alternative route.
However, some facts may imply restrictions to
traffic, even if temporarily. In this case, the PCM
recommends to the controller that W
M
be changed or
aborted. The controller then invokes the route
planning component (outside the scope of this paper)
to create a new version of W
M
.
The route planning component is prepared to create
routes that consider a list of traffic restrictions
(usually maximum load and maximum height
permitted, forbidden cargo traffic hours, etc…).
Finally, the PCM may also receive events from
the MOM that represent incidents involving M (e.g.
a mechanical problem with M). It then invokes
workflows, stored in the TPL, to mitigate the
incident and eventual damages to the environment
(e.g. to clean up an oil spill).
ProactiveMonitoringofMovingObjects
193
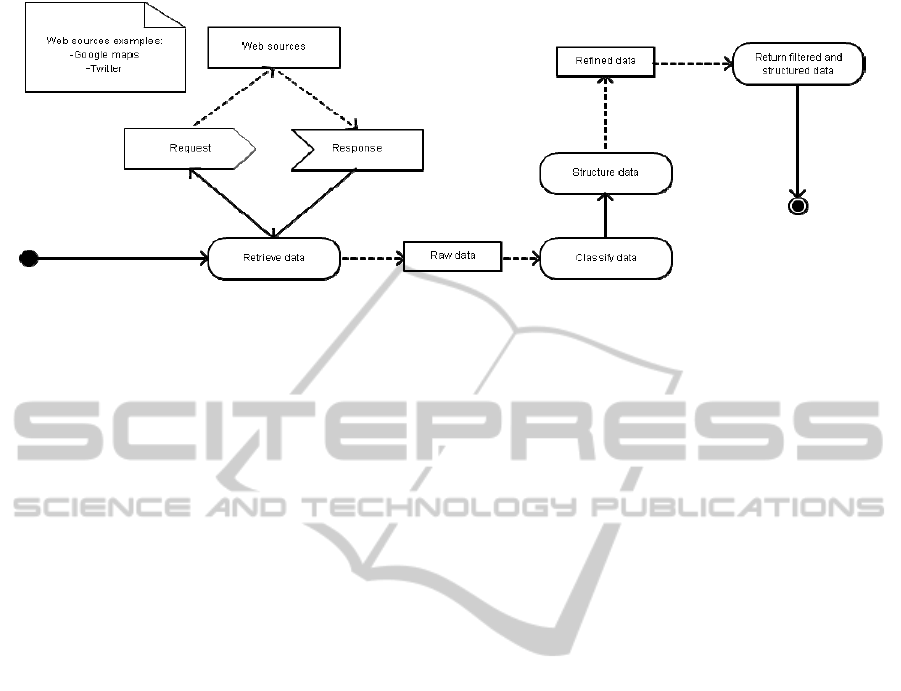
Figure 2: Data flow of the DSDM.
5 CONCLUSIONS
In this paper, we first discussed basic requirements
to achieve proactive monitoring of moving objects.
Then, we proposed an architecture that meets the
requirements. The first key point of the discussion is
to model the process behind a moving object as a
workflow to be able to infer future actions. The
second key point is to monitor or even to predict
changes in the environment by exploring dynamic
data sources.
Finally, we outlined some of the features of a
prototype application to monitor a fleet of delivery
trucks. In particular, the prototype uses Twitter as a
viable dynamic data source to detect changes in the
current road conditions, as well as to register future,
planned changes that may affect the traffic in certain
roads.
We plan to improve the prototype application in
several directions. In particular, we intend to explore
a supervised strategy to address the problem of
classifying facts extracted from tweets. We also plan
to explore RSS feeds as a dynamic data source
(Chen et al, 2007) and to automatically analyze Web
site containing news and weather reports as a viable
source of dynamic information.
REFERENCES
Alvares, L. O., Loy, A. M., Renso, C., and Bogorny, V.,
2011. An algorithm to identify avoidance behavior in
moving object trajectories. In: Journal of the Brazilian
Computer Society 11.
Carvalho, S., Sarmento, L. and Rossetti, R., (2010). Real-
Time Sensing of Traffic Information in Twitter
Messages. In: ATSS @ IEEE ITSC 2010 Proceedings
of 4th Workshop on Artificial Transportation Systems
and Simulation, Madeira, Portugal
Chen, Y. F., Di Fabbrizio, G., Gibbon, D., Jora, S.,
Renger, B., Wei, B., 2007. Geotracker: geospatial and
temporal RSS navigation. In 16th International
Conference on World Wide Web. pp. 41-50. Alberta.
MacEachren, A. M., Robinson, A. C., Jaiswal, A.,
Pezanowski, S., Savelyev, A., Blanford, J., Mitra, P.,
2011. Geo-Twitter analytics: applications in crisis
management, In 25th ICC, International Cartographic
Conference [available online]
Moreno, B., Times, V. C., Renso, C., and Bogorny, V.,
2010. Looking inside the stops of trajectories of
moving objects. In XI Brazilian Symposium on
Geoinformatics, pp. 9–20, Campos do Jordão.
Santos, M. Y., and Moreira, A., (2010). GUESS: on the
prediction of mobile users’ movement in space, In:
Wachowicz, M. (Ed.) Movement-Aware Applications
for Sustainable Mobility: Technologies and
Approaches, IGI Global Publishing.
Siqueira, F. L. and Bogorny, V., 2011. Discovering
chasing behavior in moving object trajectories. In
Transactions in GIS, 15(5).
Tennenhouse, D., 2000. Proactive computing. In: Comm.
ACM, vol. 43, May. 2000, pp. 43–50.
ICEIS2012-14thInternationalConferenceonEnterpriseInformationSystems
194
