
Adaptive Gravitational Search Algorithm for PI-fuzzy
Controller Tuning
Radu-Codruţ David, Radu-Emil Precup
Dept. of Automation and Appl. Inf., “Politehnica” University of Timisoara, Bd. V. Parvan 2, 300223, Timisoara, Romania
Emil M. Petriu
School of Electrical Eng. and Computer Science, University of Ottawa, 800 King Edward, ON, K1N 6N5, Ottawa, Canada
Mircea-Bogdan Rădac, Constantin Purcaru, Claudia-Adina Dragoş, Stefan Preitl
Dept. of Automation and Appl. Inf., “Politehnica” University of Timisoara, Bd. V. Parvan 2, 300223, Timisoara, Romania
Keywords: Adaptive Gravitational Search Algorithms, Process Gain Sensitivity, Simulation Results, Takagi-Sugeno
PI-fuzzy Controllers.
Abstract: This paper proposes an adaptive Gravitational Search Algorithm (aGSA) focused on tuning of Takagi-
Sugeno PI-fuzzy controllers (T-S PI-FCs). The algorithm adapts two depreciation laws of the gravitational
constant to the iteration index, a parameter in the weighted sum of all forces exerted from the other agents to
the iteration index, and the reset at each stage of agents’ worst fitnesses and positions to their best values.
Two fuzzy logic blocks carry out the adaptation of the ratios of exploration runs and explanation runs using
the ratio between the minimum and maximum Popov sums as an input variable. A tuning method for T-S
PI-FCs dedicated to a class of nonlinear servo systems with an integral component and is offered, and T-S
PI-FCs with reduced process gain sensitivity are tuned. A case study and digital simulation results illustrate
the optimal tuning of a T-S PI-FC for the position control of a laboratory servo system.
1 INTRODUCTION
Fuzzy control systems are successful in many
applications as relatively easily understandable
nonlinear control approaches (Blažič et al., 2003;
Sala et al., 2005). Evolutionary algorithms are
employed in the optimal tuning of fuzzy control
systems; the current approaches include simulated
annealing (Haber et al., 2009; Precup et al., 2011a),
elite-guided continuous ant colony optimization
(Juang and Chang, 2011), Particle Swarm
Optimization (PSO) eventually combined with
genetic algorithms (Ling et al., 2008; Precup et al.,
2011b; Valdez et al., 2011), and iterative genetic
optimization (Onieva et al., 2011).
This paper proposes a new aGSA dedicated to
the optimal tuning of Takagi-Sugeno PI-fuzzy
controllers (T-S PI-FCs). Our aGSA is developed
around the popular GSA (Rashedi et al., 2009), and
it is characterized by the several new properties: two
Single Input-Single Output (SISO) fuzzy logic
blocks ensure the adaptation of the ratios of
exploration runs and of explanation runs using the
ratio between the minimum and maximum Popov
sums as an input variable; the inclusion of Popov
sums guarantees the convergence; the adaptation of
two depreciation laws of the gravitational constant to
the iteration index; the adaptation of a parameter in
the weighted sum of all forces exerted from the other
agents to the iteration index.
These properties are advantageous compared to
the state-of-the-art because of the improved search
process offered by our new algorithm. Therefore our
approach, which is different to that proposed by
Askari and Zahiri (2011), exhibits an additional
improvement with respect to GSAs (Precup et al.,
2011b).
This paper offers twofold new contributions.
First, aGSA is applied to optimal tuning of T-S PI-
FCs is proposed. Second, a class of T-S PI-FCs
136
David R., Precup R., Petriu E., R
ˇ
adac M., Purcaru C., Drago¸s C. and Preitl S..
Adaptive Gravitational Search Algorithm for PI-fuzzy Controller Tuning.
DOI: 10.5220/0003998101360141
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 136-141
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

which ensures a reduced process gain sensitivity of
the fuzzy control systems is suggested. A tuning
method is given to minimize objective functions
which depend on the control error and on the
squared sensitivity function defined with respect to
process gain variations from the state sensitivity
models of fuzzy control systems.
This paper treats the following topics: the new
aGSA is presented in the next section. The tuning
method for optimal T-S PI-FCs is described in
Section 3. Section 4 discusses the case study of T-S
PI-FCs optimally tuned for the angular position
control of a laboratory DC nonlinear servo system.
The conclusions are pointed out in Section 5.
2 ADAPTIVE GSA
The standard GSA uses agents (particles), and two
equations are usually used as depreciation laws of
the gravitational constant versus GSA’s iterations:
)/1 ()(
max0
kkgkg
ψ
−=
,
(1)
)/ exp()(
max0
kkgkg
ζ
−=
,
(2)
where
)(kg
is the gravitational constant at current
iteration index
k,
0
g
is the initial
)(kg
,
10 <
ψ
<
and
0>
ζ
are parameters which affect GSA’s
convergence and search accuracy, and
max
k
is the
maximum number of iterations.
Considering
N
agents and a q-dimensional
search space, the position of
th
i
agent is defined in
terms of the vector
i
X
Nixxx
Tq
i
d
iii
...1 ,]......[
1
==X
,
(3)
where:
d
i
x
– the position of
th
i
agent in
th
d
dimension,
qd ...1=
, T – matrix transposition. The
acceleration
)(ka
d
i
of
th
i
agent in
th
d
dimension is
)},)(/()]()()[()(
)({)](/1[)(
,1
ε+−
σ=
∑
≠=
krkxkxkmkm
kgkmka
ij
d
i
d
jAjPi
N
ijj
jIi
d
i
(4)
where:
10 ≤σ≤
j
– a random generated number,
)(km
Pi
and
)(km
Aj
– the active and passive
gravitational mass related to
th
i
and
th
j
agent,
0>ε
– a relatively small constant,
)(tm
Ii
– the
inertia mass related to
th
i
agent, and
)(kr
ij
– the
Euclidian distance between
th
i
and
th
j
agents:
||)()(||)( kkkr
jiij
XX −=
.
(5)
The next velocity of an agent,
)1( +kv
d
i
, and the
next position of an agent,
)1( +kx
d
i
, result from the
state-space equations (Rashedi et al., 2009)
),1()()1(
),()()1(
++=+
+ρ=+
kvkxkx
kakvkv
d
i
d
i
d
i
d
i
d
ii
d
i
(6)
with
10 ≤
ρ
≤
i
– a uniform random variable.
The active gravitational mass and the inertial
mass are (Rashedi et al., 2009)
),(max)( ),(min)(
)],()(/[)]()([)(
, ],)(/[)()(
...1
...1
1
kfkwkfkb
kwkbkwkfkn
mmmknknkm
j
Nj
j
Nj
ii
iIiiA
N
j
jii
=
=
=
==
−−=
===
∑
(7)
where
)(kf
i
is the fitness value of
th
i
agent at
iteration index
k, f is the fitness function, the term
)(kb
corresponds to the best agent, and the term
)(kw
corresponds to the worst agent.
The convergence of the aGSA is guaranteed by
hyperstability analysis results derived from (Landau,
1979; Precup et al., 2003). A sufficient condition for
GSA’s convergence is
,]......[
,])(...)()(...)([
)( ,0 ,const ,0
,)())((),(
11LTI
11
LTI
0001
2
0
LTILTI
10
1
0
Tq
ii
q
iii
Tq
ii
q
ii
i
k
kk
i
T
ii
xxvv
kakakaka
kkk
kkkk
=
−
=≠μ=μ≥≥∀
μ−≥=ν
∑
=
v
w
vw
(8)
where
,...1 ),,(
10
Nikk
i
=
ν
is the Popov sum, and
the superscript LTI points out a discrete-time linear
time-invariant block resulted after the organization
of equations (4) to (7) as a dynamical feedback
system structure.
aGSA is formulated in terms of the flowchart
presented in Figure 1. Stage II allows the algorithm
to discover the extent of the search space. This stage
is characterized by a linear decrease of
)(kg
according to (1) during the first
max1
kr
e
runs of the
search process, where
1e
r
is the ratio of exploration
runs
10
1
<<
e
r
. The input variable
i
v
is
,0
),,(max/),(min
01
10
...1
10
...1
≥≥∀
ν
ν
=
=
=
kk
kkkkiv
i
Ni
i
Ni
(9)
AdaptiveGravitationalSearchAlgorithmforPI-fuzzyControllerTuning
137
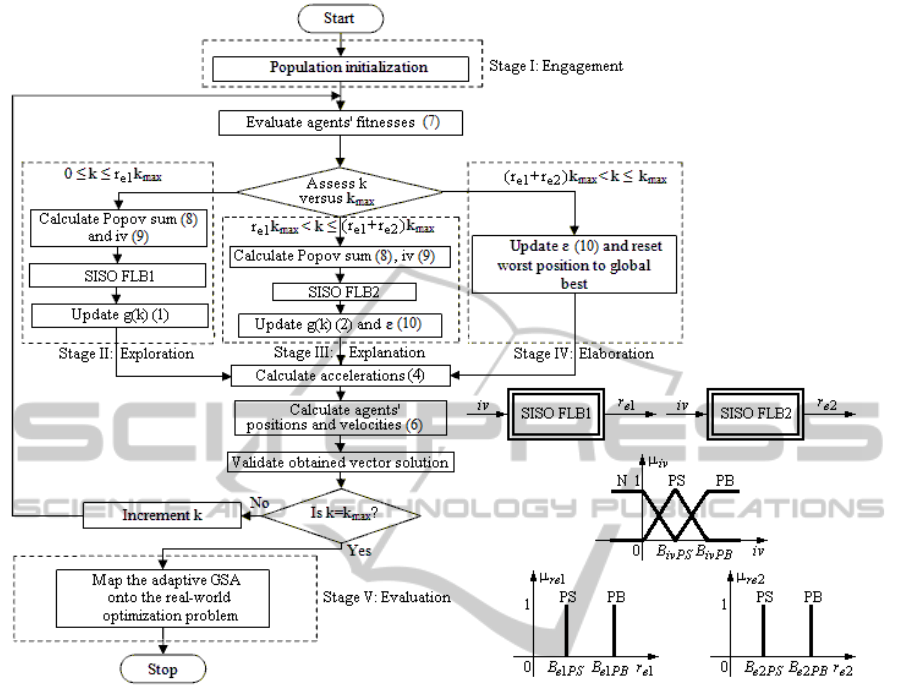
Figure 1: Flowchart of aGSA, and structures of SISO FLB1 and SISO FLB2.
and it is applied to the Mamdani fuzzy block SISO
FLB1 (with the structure and membership functions
presented in Figure 1) to calculate
1e
r
.
aGSA restricts agents’ movements in stage III by
the introduction of a more aggressive depreciation
schedule of
)(kg
in terms of (2) and by the linear
depreciation of
ε
)]/()(1[
max1maxmax10
krkkrk
ee
−−−ε=ε
.
(10)
The input variable
i
v
is calculated and applied to the
second SISO fuzzy logic block (SISO FLB2) which
calculates the ratio of explanation runs
10
2
<<
e
r
.
The next
max2
kr
e
runs in the search process are
conducted using (10).
The rule base of SISO FLB1 is
PS. IS THEN PB IS IF :
PB, IS THEN PS IS IF :
,PS IS THEN N IS IF :
1
3
1
2
1
1
e
e
e
rivR
rivR
rivR
(11)
Rule
1
R
points out that some runs do not fulfil (8);
therefore a small number of runs must be conducted.
Rule
2
R
outlines that agents’ positions are
oscillating far away from the solution, so a high
number of runs is needed. Rule
3
R
indicates that
aGSA is close to the solution. We suggest the
following parameter settings of SISO FLB1 to
ensure a trade-off to convergence speed and number
objective function evaluations:
3.0=
ivPS
B
,
8.0=
ivPB
B
,
,15.0
1
=
PSe
B
and
2.0
1
=
PBe
B
.
Mamdani’s MAX-MIN compositional rule of
inference is used in the inference engines of SISO
FLB1 and SISO FLB2. The defuzzification for both
SISO FLB1 and SISO FLB2 is carried out by the
center of gravity method for singletons.
The rule base of SISO FLB2 is similar to (11),
and the parameters of output membership functions
of SISO FLB2 are set as follows (similar settings to
to SISO FLB1):
45.0
2
=
PSe
B
and
5.0
2
=
PBe
B
.
Stage IV sets the general position for the optimal
value of fitness function and dedicates the remaining
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
138

time to the refinement of obtained results. The value
of
)(kg
stops decaying and only
ε
continues the
depreciation process. Worst agents’ positions are
reset to the best values obtained so far after each run.
Stage V evaluates the real-world optimization
problem’s performance for the location of the best
position vector obtained during the search process.
The obtained solution is mapped onto the real-world
optimization problem and tested at this stage. The
optimization problem which leads to a new class of
T-S PI-FCs with a reduced process gain sensitivity is
,])]([)(|)([|)(
),(minarg
0
22
*
∑
∞
=
∈
σγ+=
=
t
kkk
IAE
k
IAE
D
tteI
I
PPP
P
ρ
ρρ
ρ
ρ
(12)
where:
ρ
– the parameter vector of the controller,
*
ρ
– the optimal parameter vector,
ρ
D
– the feasible
domain of
ρ
,
)(ρ
P
k
IAE
I
is the objective function,
N∈t
– the independent discrete time argument,
)(te
– the control error,
)(t
P
k
σ
– the output
sensitivity function (Precup et al., 2011b),
P
k
γ
– the
weighting parameter, IAE – the Integral of Absolute
Error, and all variables depend on
ρ
.
3 OPTIMAL TAKAGI-SUGENO
PI-FUZZY CONTROLLERS
Many processes in servo systems can be described
by the continuous-time nonlinear time-invariant
SISO state-space models saturation and dead zone
static nonlinearity (Precup et al., 2011b). A
simplified process model (with variable parameters)
used in controller tuning is the transfer function
)]1(/[)( sTsksP
P Σ
+=
,
(13)
where
P
k
is the process gain and
Σ
T
is the small
time constant.
PI controllers are recommended for processes of
type (13) as shown in (Åström and Hägglund, 1995;
Visioli, 2004). PI controllers’ transfer functions are
)]/(11[/)1()(
iCic
sTkssTksC +=+=
,
(14)
where
c
k
is the controller gain,
i
T
is the integral
time constant and
icC
Tkk =
. Very good control
system performance indices and a trade-off to these
indices can be achieved if the PI controllers are
tuned by the Extended Symmetrical Optimum (ESO)
method (Preitl and Precup, 1999) which uses a
single design parameter
β
and the tuning conditions
201 , ), /(1
2
<β<β=ββ=
ΣΣ
TTkTk
iPc
.
(15)
T-S PI-FCs are tuned in order to ensure the
performance improvement. The Two Inputs-Single
Output fuzzy controller (TISO-FC) block (Figure 2)
uses the SUM and PROD operators in the inference
engine and the weighted average defuzzification
method. The rule base of T-S PI-FC is
),2/(2 ),2/(
)],()([)(
THEN P IS )( AND P IS )( IF :
)],()([)(
THEN ZEIS )( AND P IS )( IF :
...
)],()([)(
THEN ZEIS )( AND N IS )( IF :
)],()([)
(
THEN N IS )( AND N IS )( IF :
9
8
2
1
sissicP
P
P
P
P
TTTTTkK
teteKtu
teteR
teteKtu
teteR
tekeKtu
teteR
teteKtu
teteR
−=μ−=
μ+Δη=Δ
Δ
μ+Δ=Δ
Δ
μ+Δ=Δ
Δ
μ+Δη=Δ
Δ
(16)
where
)1()()( −−=Δ tetete
is the increment of e,
)1()()( −−=Δ tututu
is the increment of u,
s
T
is
the sampling period, and the parameter
10 ≤
η
<
reduces the overshoot. The tuning condition resulted
from the modal equivalence principle is
) 2/(2
sesee
TTBTBB −
β
=
μ
=
ΣΔ
.
(17)
Figure 2: Structure of T-S PI-FC.
The ESO method and the modal equivalence
principle lead to the reduction of the number of T-S
PI-FC parameters and to the simplification of the
number of variables of the objective function. The
parameter vector
3
R∈ρ
of T-S PI-FCs is
T
][
321
ρρρ=ρ
, with
η
=
ρ
=
ρ
β
=
ρ
321
, ,
e
B
.
Our aGSA is mapped onto the optimization problem
AdaptiveGravitationalSearchAlgorithmforPI-fuzzyControllerTuning
139
(12) which ensures the optimal tuning of T-S PI-FC
parameters by means of
....1 ,
,...1 ,...1 ),()(
Ni
NjmaIkf
i
k
IAEj
P
==
===
ρX
ρ
(18)
The tuning method consists of the following
steps which have to be proceeded to get the optimal
parameter vector
*
ρ
:
Step A. Apply (15), set T
s
, apply (16), derive
the sensitivity model with respect to k
P
.
Step B. Set γ
kP
to meet the performance
specifications, validation condition, and
feasible domain of
ρ
in (12),
3=
∈
q
RD
ρ
, to
include all constraints.
Step C. Apply aGSA to get optimal parameter
vector
*
ρ
, apply (17) to compute
*
e
B
Δ
.
4 CASE STUDY AND
SIMULATION RESULTS
The case study applies the new tuning method to a
T-S-PI-FC for the angular speed control of a
laboratory servo system built around the INTECO
DC servo system laboratory equipment experimental
setup. The parameters in (13) are (Precup et al.,
2011b)
88.139=
P
k
and
s 9198.0=
Σ
T
.
Steps A – C are applied and a set of results is
presented as follows in terms of setting. T
s
=0.01s
and γ
kP
=100. A good trade-off to convergence speed
and number of evaluations of
)(ρ
P
k
IAE
I
is ensured by
aGSA parameters set to N=20, k
max
=100, ζ=30,
ε
0
=0.01 and g
0
=100. The optimal values of T-S PI-
FC parameters are
2572.22
*
=
e
B
,
0806183.0
*
=
Δe
B
,
981566.0
*
=η
, and the reduced objective function
of
488237
min
=
P
k
IAE
I
. The comparison was done for
the same parameter values for GSA; the optimal
parameters of T-S PI-FC are
20
*
=
e
B
,
072393.0
*
=
Δe
B
,
1
*
=η
, and the reduced objective
function is
488523
min
=
P
k
IAE
I
. The convergence
speed is defined as the number of evaluations of
objective function until reaching the minimum. The
average values of best five runs of both algorithms
show the convergence speed of 532.4 for GSA and
of 1622.8 for aGSA.
The comparison of these results shows that the
aGSA leads to improved optimal values of
)(ρ
P
k
IAE
I
compared to GSA for the same value of γ
kP
.
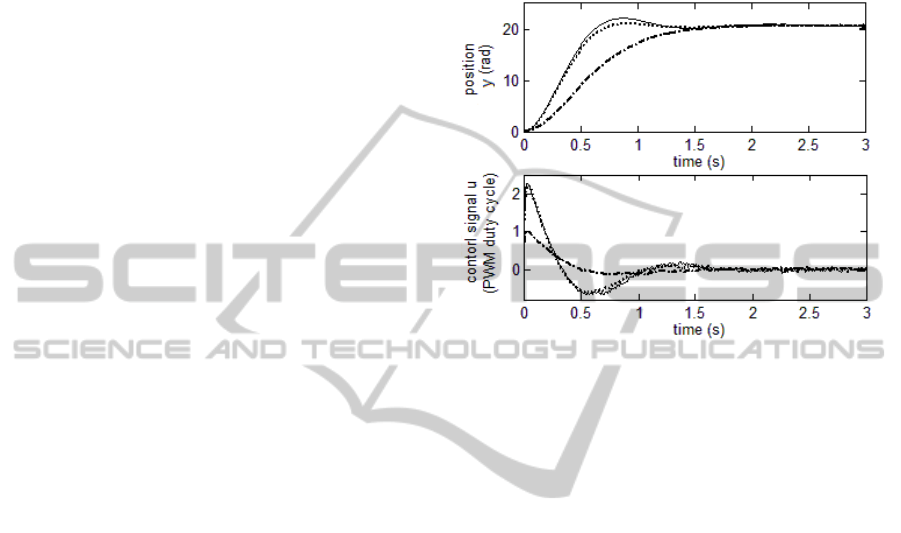
A sample of simulation results is presented in
Figure 3. The simulations were carried out for the
step-type angular position reference input of
rad 20=r
and
6.3=
β
for control systems with T-S-
PI-FC tuned by the new aGSA and for the fuzzy
control system with T-S-PI-FC tuned by GSA.
Figure 3: Time responses of fuzzy control systems with
initial T-S PI-FC (line-dotted), GSA tuned T-S PI-FC
(solid), aGSA tuned T-S PI-FC (dotted).
Based on these simulation results, our solutions
can be accepted as very close to the optimal ones.
However different conclusions can be drawn for
other objective functions eventually controlling
other processes (Baranyi et al., 1997; Ferreira and
Ruano, 2009; Hladek et al., 2009; Johanyák, 2010;
Leva and Maggio, 2011).
5 CONCLUSIONS
This paper has introduced an aGSA which employs
the adaptation of two parameters of a classical GSA
to the iteration index and on the fuzzy logic-based
adaptation of the number of algorithm’s runs in two
stages. Popov’s hyperstability results guarantee the
convergence of our aGSA.
The simple and effective implementation of
aGSA in the optimal tuning of parameters of T-S PI-
FCs is obtained by the application of the ESO
method and of the modal equivalence principle. In
addition, aGSA offers a better usage of the
algorithms resources by extending the search
process to the entire search duration.
Future research will concern the extension of our
aGSA such that to be applied to other optimization
problems which will offer robustness properties of
the fuzzy control systems. Nonlinear MIMO
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
140

processes will be targeted.
ACKNOWLEDGEMENTS
This work was supported by a grant of the Romanian
National Authority for Scientific Research, CNCS –
UEFISCDI, project number PN-II-ID-PCE-2011-3-
0109, and by a grant of the NSERC of Canada.
REFERENCES
Askari, H., Zahiri, S.-H., 2011. Decision function
estimation using intelligent gravitational search
algorithm. International Journal of Machine Learning
and Cybernetics. DOI 10.1007/s13042-011-0052-x.
Åström, K. J., Hägglund, T., 1995. PID Controllers
Theory: Design and Tuning. Research Triangle Park,
NC: Instrument Society of America.
Baranyi, P., Korondi, P., Hashimoto, H., Wada, M., 1997.
Fuzzy inversion and rule base reduction. In
Proceedings of IEEE International Conference on
Intelligent Engineering Systems (INES’97). Budapest,
Hungary, 301-306.
Bellomo, D., Naso, D., Babuška, R., 2008. Adaptive fuzzy
control of a non-linear servo-drive: theory and
experimental results. Engineering Applications of
Artificial Intelligence. 21, 846-857.
Blažič, S., Škrjanc, I., Matko, D., 2003. Globally stable
direct fuzzy model reference adaptive control. Fuzzy
Sets and Systems. 139, 3-33.
Ferreira, P. M., Ruano, A. E., 2009. On-line sliding-
window methods for process model adaptation. IEEE
Transactions on Instrumentation and Measurement.
58, 3012-3020.
Haber, R. E., Haber-Haber, R., Jiménez, A., Galán, R.,
2009. An optimal fuzzy control system in a network
environment based on simulated annealing. An
application to a drilling process. Applied Soft
Computing. 9, 889-895.
Hladek, D., Vaščák, J., Sinčák, P., 2009. Multi-robot
control system for pursuit-evasion problem. Journal of
Electrical Engineering. 60, 143-148.
Johanyák, Z. C., 2010. Student evaluation based on fuzzy
rule interpolation. International Journal of Artificial
Intelligence. 5, 37-55.
Juang, C.-F., Chang, P.-H., 2011. Recurrent fuzzy system
design using elite-guided continuous ant colony
optimization. Applied Soft Computing. 11, 2687-2697.
Landau, Y.-D., 1979. Adaptive Control: The Model
Reference Approach. New York: Marcel Dekker.
Leva, A., Maggio, M., 2011. A systematic way to extend
ideal PID tuning rules to the real structure. Journal of
Process Control. 21, 130-136.
Ling, S. H., Iu, H. H. C., Chan, K. Y., Lam, H. K.., Yeung,
C. W., Leung, F. H. F., 2008. Hybrid particle swarm
optimization with wavelet mutation and its industrial
applications. IEEE Transactions on Systems, Man, and
Cybernetics, Part B: Cybernetics. 38, 743-763.
Onieva, E., Naranjo, J. E., Milanés, V., Alonso, J., García,
R., Pérez, J., 2011. Automatic lateral control for
unmanned vehicles via genetic algorithms. Applied
Soft Computing. 11, 1303-1309.
Precup, R.-E., David, R.-C., Petriu, E. M., Preitl, S.,
Rădac, M.-B., 2011a. Fuzzy control systems with
reduced parametric sensitivity based on simulated
annealing. IEEE Transactions on Industrial
Electronics. DOI 10.1109/TIE.2011.2130493.
Precup, R.-E., David, R.-C., Petriu, E. M., Rădac, M.-B.,
Preitl, S., Fodor, J., 2011b. Evolutionary optimization-
based tuning of low-cost fuzzy controllers for servo
systems. Knowledge-Based Systems. DOI
10.1016/j.knosys.2011.07.006.
Precup, R.-E., Preitl, S., Fur, G., 2003. PI predictive fuzzy
controllers for electrical drive speed control: Methods
and software for stable development. Computers in
Industry. 52, 253-270.
Preitl, S., Precup, R.-E., 1999. An extension of tuning
relations after symmetrical optimum method for PI
and PID controllers. Automatica. 35, 1731-1736.
Rashedi, E., Nezamabadi-pour, H., Saryazdi, S., 2009.
GSA: A gravitational search algorithm. Information
Sciences. 179, 2232-2248.
Sala, A., Guerra, T. M., Babuška, R., 2005. Perspectives
of fuzzy systems and control. Fuzzy Sets and Systems.
156, 432-444.
Valdez, F., Melin, P., Castillo, O., 2011. An improved
evolutionary method with fuzzy logic for combining
particle swarm optimization and genetic algorithms.
Applied Soft Computing. 11, 2625-2632.
Visioli, A., 2004. A new design for a PID plus
feedforward controller. Journal of Process Control.
14, 457-463.
AdaptiveGravitationalSearchAlgorithmforPI-fuzzyControllerTuning
141
