
On the Problem of Task Planning in Multi-robot Systems
Zhi Yan, Nicolas Jouandeau and Arab Ali Cherif
Advanced Computing Laboratory of Saint-Denis (LIASD), Paris 8 University
2 Rue de la Libert´e, 93526 Saint-Denis, France
Keywords:
Task planning, Multi-robot Systems, Coordination.
Abstract:
Multi-robot task planning (MRTP) is one of the fundamental problems for multi-robot systems. An important
question facing this research topic is, which robot should execute which task so as the expected overall sys-
tem performance can be maximized? Many approaches have been proposed for such a purpose. This paper
investigates the existing works in the field. The approaches have been surveyed and some representatives are
compared with detailed results. A brief discussion and further research perspectives are also given at the end
of the paper.
1 INTRODUCTION
The task of coming up with a sequence of actions that
will achieve a goal is called planning (Russell and
Norvig, 2002). In multi-robot systems (MRS), plan-
ning can be used to coordinate robots to accomplish
the team mission. Unfortunately, optimal planning for
MRS is typically an N P -hard problem. The chal-
lenge then is to have tractable planning that produces
good solutions (Dias et al., 2005). Multi-robot plan-
ning is usually divided into two aspects: task planning
and motion planning. Task planning involves task de-
composition and task allocation. So far, research on
task planning of MRS is concentrated on task alloca-
tion problem, and relatively little on task decompo-
sition problem. In fact, the task decomposition is an
important research topic because the effect of task al-
location could be directly influenced by it.
2 MULTI-ROBOT TASK
DECOMPOSITION
The problem of multi-robot task decomposition
(MRTD) mainly refers to that the total mission to
be completed is decomposed into several single sub-
tasks which can be completed independently by a
robot separately, according to the characteristic, re-
quirement and resource allocation of the total mis-
sion itself (Chen et al., 2010). (Stone and Veloso,
1999) achieved collaboration between agents through
the introduction of formations which decomposes the
task space defining a set of roles with associated be-
haviors. (Botelho and Alami, 1999) presented a de-
centralized system to describe and perform task plan-
ning, decomposition and allocation in multi-robot en-
vironments, called M+ protocol. (Zlot and Stentz,
2005) focused on complex tasks that can be decom-
posed into multiple inter-related subtasks. They ad-
dressed the task decomposition problem by general-
izing tasks to task trees within a peer-to-peer trading
market. (Tang and Parker, 2005) considered that, in
typical approaches to multi-robot team working, the
decomposition of the team task into subtasks is de-
fined by the human designer in advance of the robot
team performance, and this pattern also outlines the
available multi-robot task solutions in advance of the
mission. So they described a methodology for au-
tomatically synthesizing task solutions for heteroge-
neous multi-robot teams.
3 MULTI-ROBOT TASK
ALLOCATION
The problem of multi-robot task allocation (MRTA)
can be considered as an instance of the well-known
optimal assignment problem (OAP). In domains
where the group dynamics have a significant effect
on group performance, MRTA is known to be N P -
hard (Gerkey and Matari´c, 2004) (Dahl et al., 2009).
This is the most common case in MRS. The task al-
location in MRS is generally undertaken to assign
robots to tasks (or tasks to robots) so as to maximize
423
Yan Z., Jouandeau N. and Ali Cherif A..
On the Problem of Task Planning in Multi-robot Systems.
DOI: 10.5220/0004017204230426
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 423-426
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

the expected overall system performance. However,
because MRTA becomes a dynamic decision prob-
lem that varies in time with environmental changes,
the static assignment method is no longer applicable.
Thus an alternative solution is to iteratively solve the
static assignment problem over time.
(Gerkey and Matari´c, 2004) gave a formal analysis
and domain-independent taxonomy of MRTA prob-
lems, in which the MRTA problems have been classi-
fied into seven categories according to ability of robot
to perform tasks, number of robots required for a task,
and manner of the task assignment. They also ana-
lyzed and compared some iterated assignment archi-
tectures: ALLIANCE (Parker, 1994a), BLE (Werger
and Matari´c, 2000), and M+ (Botelho and Alami,
1999), and some online assignment architectures:
MURDOCH (auction-based) (Gerkey and Matari´c,
2002), first-price auctions (market-based) (Stentz and
Dias, 1999), and dynamic role assignment (Chaimow-
icz et al., 2002), for MRTA, respectively.
The contract net protocol (CNP) has been devel-
oped by (Smith, 1980), which aims to achieve task
assignment with distributed control by a negotiation
process in multi-agent systems. So far, most meth-
ods of MRTA are based on the CNP model. (Botelho
and Alami, 1999) presented M+ system, a scheme for
multi-robot cooperation through negotiated task allo-
cation and achievement, which is the first CNP-based
approach to MRTA. (Stentz and Dias, 1999) presented
the ideas of free market architecture for coordinating
a group of robots to achievea given objective (market-
based approach). This architecture defines revenue
and cost functions across the possible plans for ex-
ecuting a specified task. The task is accomplished by
dividing it into subtasks and allowing the robots to
bid and negotiate to carry out these subtasks. The ob-
jective is achieved by individual robots cooperating
and competing with each other to further their own
self-interests. (Zlot et al., 2002) applied these ideas to
multi-robot mapping and exploration problem. This
work borrows the market architecture which seeks to
maximize benefit while minimizing cost, thus aiming
to maximize utility. The benefit is information gained
by visiting a goal point, the cost is the estimated dis-
tance traveled to reach the goal (by using D* algo-
rithm (Stentz, 1994)), then the utility is the difference
between the benefit and the cost. The market-based
coordination architecture has been applied to a Mars
exploration scenario (combined with D* algorithm
for robot motion planning). (Gerkey and Matari´c,
2002) presented the first online assignment architec-
ture MURDOCH, which uses a first-price auction to
assign each task (auction-based approach). The auc-
tion proceeds in five steps: task announcement, met-
ric evaluation, bid submission, close of auction, and
progress monitoring/contract renewal. The MUR-
DOCH system has been tested in two different do-
mains: a long-term loosely coupled task domain and a
short-term tightly coupled box-pushing task. The ma-
jor differences between auction-based approach and
market-based approach are that, 1) auction-based ap-
proach uses the bid based on the estimated cost, but
market-based approach takes into account both cost
and benefit, 2) auction-based approach does not allow
task reassignment, but market-based approach allows
later reassignment.
In addition, (Dahl et al., 2009) presented an algo-
rithm for task allocation in groups of homogeneous
robots, which is based on vacancy chains, a resource
distribution strategy common in human and animal
societies. This algorithm uses local task selection, re-
inforcement learning for estimation of task utility, and
reward structures based on the vacancy chain frame-
work. (Hanna, 2005) proposed an approach which
allows robots to take into account the uncertainty of
task execution. They decomposed the MRTA prob-
lem into two stages. In the first stage, each robot se-
lects its own tasks based on the expected benefit using
Markov decision process (MDP). In the second stage,
an auction-based mechanism is applied to assign tasks
to robots. (Michael et al., 2008) proposed a dis-
tributed market-based coordination algorithm where
agents are able to bid for task assignment with the as-
sumption that agents have knowledge of all tasks as
well as the maximum number of agents that can be
assigned to every individual task. Each auction is per-
formed among neighboring groups of agents and re-
quires only local communication. They verified their
algorithm in multi-robot formation control problem.
(Shiroma and Campos, 2009) proposed a framework
called CoMutaR, which is designed to both tackle task
allocation and coordination problems in MRS. This
framework enables the single robot to perform mul-
tiple tasks concurrently by periodically checking and
updating task-related information during implemen-
tation. It has been tested and evaluated in simulation
in object transportation, area surveillance, and multi-
robot box pushing problem. (Wawerla and Vaughan,
2010) presented two task allocation strategies for a
multi-robot transportation system. One is based on
a centralized planner that uses domain knowledge to
solve the assignment problem in linear time. The
other enables individual robots to make individual
task allocation decisions using only locally obtainable
information and single value communication. (Yan
et al., 2011) developed a lightweight and robust de-
centralized approach based on trade rules for coordi-
nated multi-robot exploration (trade-based approach).
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
424
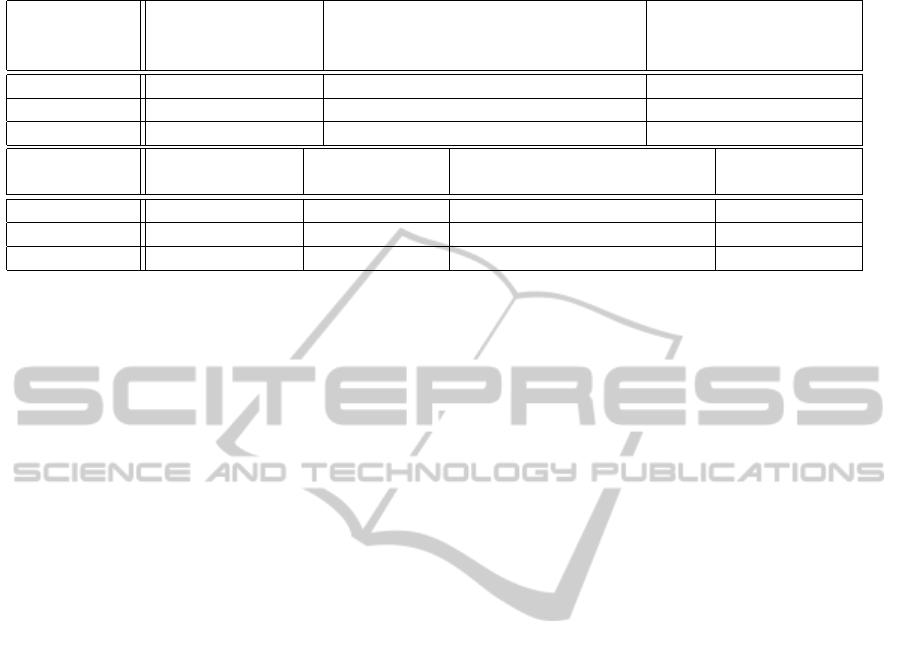
Table 1: A Comparison of Three CNP-based Online Multi-robot Task Allocation Methods.
Name Negotiation Task Task allocation ability
(Communication) allocation per iteration
model algorithm (trading round)
market-based publish/subscribe greedy algorithm (first-price auction) single task
auction-based publish/subscribe greedy algorithm (first-price auction) single task
trade-based apply/allocate greedy algorithm (first-price auction) multiple tasks
Name Utility Task Communication Computation
consideration reassignment complexity complexity
market-based cost and benefit allowed O(1)/bidder, O(n)/auctioneer O(n)
auction-based cost not allowed O(1)/bidder, O(n)/auctioneer O(n)
trade-based cost allowed O(1)/buyer, O(n)/seller O(n)
This approach is designed to simulate the relation-
ship between buyers and sellers in a business sys-
tem, to achieve dynamic task allocation by using a
mechanism of unsolicited bid. A comparison be-
tween market-based, auction-based and trade-based
approaches is given in Table 1.
Eventually, the task allocation for heterogeneous
and homogeneous systems may be different. In het-
erogeneous systems, task allocation may be deter-
mined by individual capabilities. (Parker, 1994b) in-
troduced the concept of task coverage, which mea-
sures the ability of a given team member to achieve
a given task. This parameter can be used as an index
to organize a robot team to perform a mission from
the available pool of heterogeneous robots. Task cov-
erage reaches the maximum value in homogeneous
teams, and decreases as teams become more hetero-
geneous. But in homogeneous systems, agents may
need to differentiate into different roles at design time
or dynamically at run time (Yan et al., 2011).
4 CONCLUSIONS
In this paper, we have briefly discussed the existing
works on the problem of multi-robot task planning
(MRTP). Two important aspects, multi-robot task de-
composition (MRTD) and multi-robot task allocation
(MRTA), were identified. Three online MRTA meth-
ods based on contract net protocol, market-based,
auction-based and trade-based, were compared with
detailed results. Because there is no common bench-
marking platform and planning problems, thus the
purpose of the comparison is not to point out which
method is the best, but give an overview to im-
prove our understanding. Different strategies might
be suited to different planning scenarios.
We believe that the following are some promising
avenues for future research:
• The task decomposition can directly affect the ef-
ficiency of task allocation. A more complete the-
ory should be achieved.
• Environments where robots work in are usually
dynamic. Due to the unpredictability and uncer-
tainty of the environment, the revenue and cost
functions for task allocation will be difficult to de-
fine. For the purpose of maximizing system per-
formance, robust definitions and metrics for vari-
ous scenarios should be developed.
• The motion of the robot is also an important fac-
tor influencing task achievement. A future chal-
lenge is to combine both task and motion plan-
ning reasonably, in order to make the multi-robot
systems can be situated to more complex tasks in
more complex environments.
REFERENCES
Botelho, S. C. and Alami, R. (1999). M+: A scheme for
multi-robot cooperation through negotiated task allo-
cation and achievement. In Proceedings of the 1999
IEEE International Conference on Robotics and Au-
tomation (ICRA’99), pages 1234–1239, Detroit, MI,
USA.
Chaimowicz, L., Campos, M. F. M., and Kumar, V. (2002).
Dynamic role assignment for cooperative robots. In
Proceedings of the 2002 IEEE International Confer-
ence on Robotics and Automation (ICRA’02), pages
293–298, Washington, DC, USA.
Chen, J., Yang, Y., and Wei, L. (2010). Research on the ap-
proach of task decomposition in soccer robot system.
In Proceedings of the 1st International Conference on
Digital Manufacturing and Automation (ICDMA’10),
pages 284–289, Changsha, China.
Dahl, T. S., Matari´c, M. J., and Sukhatme, G. S. (2009).
Multi-robot task allocation through vacancy chain
scheduling. Robotics and Autonomous Systems, 57(6–
7):674–687.
Dias, M. B., Zlot, R., Kalra, N., and Stentz, A. (2005).
Market-based multirobot coordination: A survey
OntheProblemofTaskPlanninginMulti-robotSystems
425

and analysis. Technical Report CMU-RI-TR-05-13,
Carnegie Mellon University, Pittsburgh, PA, USA.
Gerkey, B. P. and Matari´c, M. J. (2002). Sold!: Auction
methods for multirobot coordination. IEEE Transac-
tions on Robotics and Automation, 18(5):758–768.
Gerkey, B. P. and Matari´c, M. J. (2004). A formal analysis
and taxonomy of task allocation in multi-robot sys-
tems. The International Journal of Robotics Research,
23(9):939–954.
Hanna, H. (2005). Decentralized approach for multi-robot
task allocation problem with uncertain task execu-
tion. In Proceedings of the 2005 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS’05), pages 535–540, Alberta, Canada.
Michael, N., Zavlanos, M. M., Kumar, V., and Pappas, G. J.
(2008). Distributed multi-robot task assignment and
formation control. In Proceedings of the 2008 IEEE
International Conference on Robotics and Automation
(ICRA’08), pages 128–133, Pasadena, CA, USA.
Parker, L. E. (1994a). ALLIANCE: An architecture for fault
tolerant, cooperative control of heterogeneous mobile
robots. In Proceedings of the 1994 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS’94), pages 776–783, Munich, Germany.
Parker, L. E. (1994b). Heterogeneous Multi-Robot Cooper-
ation. PhD thesis, Massachusetts Institute of Technol-
ogy.
Russell, S. J. and Norvig, P. (2002). Artificial Intelligence:
A Modern Approach (2nd Edition). Prentice Hall.
Shiroma, P. M. and Campos, M. F. M. (2009). CoMutaR: A
framework for multi-robot coordination and task allo-
cation. In Proceedings of the 2009 IEEE/RSJ Interna-
tional Conference on Intelligent Robots and Systems
(IROS’09), pages 4817–4824, St. Louis, MO, USA.
Smith, R. G. (1980). The contract net protocol: High-
level communication and control in a distributed
problem solver. IEEE Transactions on Computers,
29(12):1104–1113.
Stentz, A. (1994). Optimal and efficient path planning for
partially-known environments. In Proceedings of the
1994 IEEE International Conference on Robotics and
Automation (ICRA’94), pages 3310–3317, San Diego,
CA, USA.
Stentz, A. and Dias, M. B. (1999). A free market architec-
ture for coordinating multiple robots. Technical Re-
port CMU-RI-TR-99-42, Carnegie Mellon University,
Pittsburgh, PA, USA.
Stone, P. and Veloso, M. (1999). Task decomposition, dy-
namic role assignment, and low-bandwidth commu-
nication for real-time strategic teamwork. Artificial
Intelligence, 110(2):241–273.
Tang, F. and Parker, L. E. (2005). Asymtre: Automated syn-
thesis of multi-robot task solutions through software
reconfiguration. In Proceedings of the 2005 IEEE In-
ternational Conference on Robotics and Automation
(ICRA’05), pages 1501–1508, Barcelona, Spain.
Wawerla, J. and Vaughan, R. T. (2010). A fast and frugal
method for team-task allocation in a multi-robot trans-
portation system. In Proceedings of the 2010 IEEE In-
ternational Conference on Robotics and Automation
(ICRA’10), pages 1432–1437, Anchorage, AK, USA.
Werger, B. B. and Matari´c, M. J. (2000). Broadcast of local
eligibility for multi-target observation. In Proceedings
of the 5th International Symposium on Distributed Au-
tonomous Robotic Systems (DARS’00), pages 347–
356, Knoxville, TN, USA.
Yan, Z., Jouandeau, N., and Ali Cherif, A. (2011). Multi-
robot decentralized exploration using a trade-based
approach. In Proceedings of the 8th International
Conference on Informatics in Control, Automation
and Robotics (ICINCO’11), pages 99–105, Noordwi-
jkerhout, The Netherlands.
Zlot, R. and Stentz, A. (2005). Complex task allocation
for multiple robots. In Proceedings of the 2005 IEEE
International Conference on Robotics and Automation
(ICRA’05), pages 1515–1522, Barcelona, Spain.
Zlot, R., Stentz, A. T., Dias, M. B., and Thayer, S. (2002).
Multi-robot exploration controlled by a market econ-
omy. In Proceedings of the 2002 IEEE International
Conference on Robotics and Automation (ICRA’02),
pages 3016–2023, Washington, DC, USA.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
426
