
Hardware on-Board Implementation of a Possible Solution
to Introduce UAVs into Non Segregated Areas
Sergio Taraglio
1
, Vincenzo Nanni
1
and Damiano Taurino
2,3
1
Robotics Lab, ENEA, Via Anguillarese 301, Rome, Italy
2
Deep Blue, Piazza Buenos Aires 20, Rome, Italy
3
Facoltà di Ingegneria, University of Florence, Via di Santa Marta 3, Florence, Italy
Keywords: Game Theory, Software Agents for Intelligent Control Systems, Distributed Control Systems, Separation
Assurance, Unmanned Aerial Vehicles, Engineering Applications.
Abstract: The implementation of a distributed control algorithm for the safe flight of Unmanned Aerial Vehicles
(UAVs) in traffic conditions in an embedded processor unit is presented. Details on the implementation are
given. The control algorithm is designed in order to avoid separation infringements with aircraft in the
neighbourhood. The algorithm is grounded on Satisficing Game Theory and supplies manoeuvres aimed at
providing separation distance among aircraft. Some results of simulated flight trials of UAVs in segregated
and non segregated areas are reviewed. Some experiments on the capability of the embedded algorithm to
pilot a simulated UAV in different traffic condition are presented.
1 INTRODUCTION
Extensive use of UAVs is a reality in military
operations in the Middle East, even if in tele-
controlled mode (Schneider, 2011). On the contrary
their use in civil environments is still limited to brief
missions and experimental flights in restricted
airspaces where they cannot mix with civilian
aircraft. Nevertheless the market for these
applications is forecasted to be quickly surging,
pushing for the introduction of unmanned aircraft in
non segregated areas (Lukovic, 2011). In a near
future UAVs and commercial aircraft will share the
same airspace; several projects are currently
working on the definition of a realistic integration
scenario (MIDCAS project website, 2012). Recently
many international and national organizations have
oriented themselves towards a more restrictive
interpretation of unmanned aircraft, steering to
remotely piloted air systems (RPAS) instead of
autonomous ones (ICAO, 2011).
The UAV flight can be controlled in different
ways, from remote to autonomous through
waypoints and autopilot modules, see e.g. (Carbone
et al., 2006)(Carbone et al., 2007). Autonomy can be
generally defined as the ability to take decisions
without human intervention. Autonomy has been,
and may continue to be, one of the bottlenecks for
future UAV development, as it has been pointed out
in (Roch, 2008).
The key issue for the introduction of UAVs in
non segregated airspaces is represented by the ability
to “keep at a distance” from all the other flying
vehicles in the neighbourhood (separation distance
assurance and collision avoidance).
In previous work (Taurino et al., 2010a) (Taurino
et al., 2010b) a game theory approach to the problem
of separation assurance has been proposed: the
ARCA algorithm (Adaptive Routing and Conflict
management for UAVs). This algorithm is a high
level control algorithm and must not be thought as a
reactive sense and avoid one. It is conceived as a
mid-term approach to foresee possible too close
distances with other traffic, intervening very early.
In this paper the integration of the ARCA
module is presented. The algorithm is implemented
in a flight ready hardware processor, and it is made
cooperate with the vehicle auto pilot. The full
hardware-in-the-loop simulation of operations is
presented and discussed.
The ARCA algorithm takes routing decisions
through the knowledge of the flight data of all the
nearby aircraft. These data are collected via the
ADS-B messages, continuously broadcasted by
every aircraft (Stamper, 2005). Up to now these data
are transmitted, but their potential benefit is not yet
177
Taraglio S., Nanni V. and Taurino D..
Hardware on-Board Implementation of a Possible Solution to Introduce UAVs into Non Segregated Areas.
DOI: 10.5220/0004029501770182
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 177-182
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

exploited. The ADS-B exploitation is currently
object of intense work by several international
institutions (see e.g. SESAR Work Package 5 (Sesar,
2012)). The ARCA algorithm thus does not need
additional data or interaction, but it exploits already
available signals for a new and valuable purpose.
In the second section of the paper the algorithm
is briefly reviewed. In the third section the available
experimental result are reviewed together with the
used experimental setup. In the fourth section the
implementation on board the Embedded Processing
Unit (EPU) is presented together with the CANOpen
implementation of the on board communications
among the various devices composing the system;
hardware-in-the-loop tests are also reported. In the
fifth section of the paper the conclusions are drawn.
2 THE ARCA ALGORITHM
The ARCA algorithm is inspired by Game Theory
and in particular it is based on the Satisficing Game
Theory approach (SGT) (Stirling, 2003). Basically,
SGT computes the best choice among various
alternatives by means of two utility functions,
rejectability and selectability, which respectively
represent costs and benefits for each agent while
making a choice. There may exist dependence
between utility functions of different agents that
implements an “altruistic” behaviour.
This approach has already proven to be effective
in dealing with several real-world problems (e.g.
packet routing (Boyan et al., 1994) and (Choi et al.,
1996), transport logistics (Wolpert et al., 1999),
automated car driving (Stirling, 2003), airborne self-
separation (Bellomi et al., 2008)) by providing
robust and dependable solutions that can be achieved
with limited computational resources.
In the UAV context each UAV can be considered
as an agent working under the SGT framework.
Selectability and rejectability of each agent are
respectively the benefits and costs of the UAV’s
available manoeuvring choices. Benefits are
essentially proportional to the optimality of the
possible route to reach the final destination (sortest
possible delay). Costs are proportional to the risk of
infringing the separation with other vehicles. Each
aircraft computes the rejectability and selectability
of each considered manoeuvre and then selects the
option maximising the difference between the
selectability and rejectability utilities. Plainly
speaking, each aircraft selects the best path with
respect to the minimum risk.
2.1 2-D ARCA Algorithm
Let us consider a single flight level. At each time
step, each UAV collects information from all other
aircraft within its communication range (viewable
aircraft). This information includes position, speed,
destination, actual heading, flight time (basically an
ADS-B frame). Each UAV may choose one of five
directions: flying straight, moderate or sharp turn to
the left, moderate or sharp turn to the right (-10°,-
5°,0°,5°,10°). For each UAV a priority set is defined
as that of all viewable aircraft with higher ranking
than itself that could be conflicting for some heading
choices (parents). The rank may be assigned using
different criteria, e.g. it can be based on the aircraft
accumulated delay, using the flight time information
in the ADS-B data.
The rejectability of agents is unconditioned: each
UAV matches the linear extension of each of its
directional options with the linear projections of
current headings of all aircraft in its priority set.
Each projected conflict adds a weight to the
rejectability function related to that directional
option, depending on distance in time and severity of
the conflict. Then a normalization is performed. This
increases the rejectability of flight options that lead
to conflicts (small separations), with more weight
for incidents closer in time. On the other hand the
selectability function reflects goal achievement. The
selectability is influenced by the preferences of other
agents, it is composed of two terms: the base
selectability (current UAV heading preferences) and
the parent selectability (higher priority agents
preferences). In non restricted airspace the
commercial aircraft have always higher priorities
than the UAVs for obvious safety purposes.
After computing the rejectability and the
selectability, each agent chooses its heading change,
maximizing the difference between selectability and
rejectability. Each satisficing agent looks for the
highest gain, with the lowest risk, taking also into
account preferences of other agents, thus obtaining a
solution that could be effective for the whole system.
2.2 3-D ARCA Algorithm
The three dimensional version of the algorithm takes
into account two additional choices for the flight
path: it is possible to climb or descend one flight
level (1000 ft). The altitude change choice is taken
through the continuous monitoring of the minimum
value for rejectability with respect to direction. If
this minimum is larger than a given threshold, it
implies that the current flight level is too crammed
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
178
and that a change of flight level is advisable.
Whether to climb or to descend is chosen still
evaluating the minimum rejectability on the two
different flight levels. Once that the altitude change
has been decided, the agent, while vertically
moving, considers itself as still belonging to the
starting flight level for half of the path, then as
belonging to the arrival flight level, and computes
the ARCA algorithm consequently. Naturally while
changing level any further altitude change is
inhibited. The altitude change is not indefinitely
allowed, e.g. the descent is inhibited if the agent is
already flying too low. This 3D ARCA algorithm
automatically considers the altitude change choice as
possessing a lower priority with respect to
manoeuvres in the same flight level. This is driven
by economic considerations (level changing is more
expensive in terms of fuel consumption) but it can
be easily changed to adapt to specific operative
scenarios.
3 EXPERIMENTAL RESULTS
The ARCA algorithm is an add-on for the vehicle
autopilot. The autopilot computes the route towards
the next waypoint and notifies the ARCA module
which, in turn, checks cyclically the danger
associated with the present UAV route and possible
deviations, taking into account the air traffic in the
neighbourhood. In order to avoid possible separation
miss it can “steer” the UAV, through the adding of
an extra waypoint in the waypoint list of the
autopilot.
The airspace where the experiments have been
performed has been graphically displayed through
the use of an interface based on the Google Earth
Plug-in. The geographical area used is that of central
Italy, above Rome.
The ARCA algorithm accesses the various UAVs
simulators, one for each UAV, with bi-directional
socket links and receives data from the ADS-B
Parser in order to take into account the commercial
aircraft routes.
Each UAV has been physically simulated via the
JSBSim aircraft simulator, which is an Open Source
flight dynamics modeller (JSBSim.sourceforge.net,
2012). A parser for the ADS-B messages has been
implemented on the SBS-1 system of the Kinetic
Avionic (Kinetic Avionic website, 2012); it outputs
the aircraft relevant data to the ARCA algorithm.
The chosen ARCA target processor is already
tested and cleared for avionic purposes, but does not
offer a too brilliant computing performance (approx.
125 Dhrystone MIPS, as a Pentium 90 PC). The
algorithm has thus been lightened of the
computation of the parent selectability. This means
that each agent does not take into account the flight
preferences of the parent aircraft. Nevertheless the
performance of the simplified version versus the full
algorithm is very similar if not better, see (Taurino
et al., 2011). The flight trial simulations reviewed in
the following are relative to the use of the simplified
algorithm.
Table 1: Choke point scenario.
UAV
number
Missed Separations
System Efficiency
Mean
Std.Dev.
Mean
Std.Dev.
3
0,000
0,000
0,995
0,001
5
0,200
0,551
0,968
0,029
10
0,233
0,430
0,907
0,036
15
0.933
0,868
0,852
0,030
Table 1 summarizes the results relative to one
experiment where cinematic aircraft have been used
(vehicles at constant speed and turning on the spot
without dynamics). The results shown are relative to
a choke point scenario (Taurino et al., 2010b). All
aircraft start on a circle of radius 60 nautical miles
and head directly through the circle centre towards
the opposite side all with the same speed, statistics is
on 30 trials. This is a well known hard challenge to
any separation assurance method. The system
efficiency is here computed in terms of flight time,
, as the average over the
number of UAVs of the ratio between ideal flight
time (no detour) and ideal flight time plus delay time
introduced by the aircraft manoeuvres. Thus
maximum efficiency is 1.
3.1 Simulated 2D Flight Trials
In the first batch of experiments a set of two or four
UAVs are dynamically simulated in a segregated
space, i.e. with no ADS-B flight data from
commercial aircraft. Two experiments are presented:
in the first, two UAVs are flown one against the
other specifying the start of each one as the
destination of the other. In the second, four UAVs
are placed at the four corners of a square and flown
towards the facing corner, passing all by the square
centre. In the first case one of the two has a right of
way over the other, i.e. a higher priority. In the
second one a ranking in priority is set up.
In the second batch of experiments the UAVs
perform the same flight paths but in a non
segregated airspace (commercial traffic ADS-B data
considered), this to show that the algorithm is able to
Hardware on-Board Implementation of a Possible Solution to Introduce UAVs into Non Segregated Areas
179

avoid separation infringements also with commercial
flights.
The results for the segregated space case are
presented in Table 2 (statistics on 30 trials). The
results of the full traffic case are relative to six trials
only, due to the impossibility to perform accelerated
time simulations. In these simulations all the traffic
is artificially considered at the same altitude in order
to stress the algorithm and in order to guarantee the
existence of several conflicts among the UAVs and
the civilian traffic. There is an average number of
separation infringements equal to 1.33 and a large
degradation in the UAV system efficiency (average
value is 0.775).
Table 2: Segregated space physical UAVs only results.
UAV
number
Missed Separations
System Efficiency
Mean
Std.Dev.
Mean
Std.Dev.
2
0,000
0,000
0,942
0,039
4
0,000
0,000
0,945
0,049
A second set of simulation has been performed
only considering aircraft flying at very high altitude,
i.e. those flying at cruise speed and altitude (runway
crossing scenario). The number of tests performed is
three employing four simulated UAVs. In this case
the average number of conflicts reduce to zero with
an average UAV system efficiency of 0.912.
3.2 Simulated 3D Flight Trials
Here the civil aircraft picked up by the ADS-B
antenna have been distributed on three adjacent
flight levels (9000, 10000 and 11000 feet), using a
simple altitude discretization. The four UAVs move
in the middle flight level and are allowed to climb
and descend two levels. Ten full simulations have
been performed, with an average number of 0.4
missed separations (all between an UAV and a
civilian aircraft) and an average traffic of 16.1
civilian aircraft. The average number of flight level
changes was of 12.2, the average duration of a single
simulation was of 75.5 minutes, see figure 1. Here it
can be seen the user graphical display based on the
Google Earth plug-in. The light blue aircraft are the
commercial ones, while the red ones are the
simulated UAVs, the circle surrounding each vehicle
has a 2.5 nautical miles radius: if two circles don’t
intersect, the separation is assured.
The analysis of the missed separations in the
simulations shows that these are caused by the
unrealistic features of the simulation setup. Since the
aircraft altitudes are discretized, an aircraft departing
from or arriving to the Fiumicino airport will
Figure 1: 3D Algorithm: westbound and eastbound UAV
are on the same flight level while northbound is on top and
southbound on the bottom.
quickly change flight level possibly suddenly
appearing at too close quarters with an UAV. In any
case such a discretization is a way to highly stress
the algorithm and the results in terms of missed
separation are quite interesting and show that the 3D
algorithm greatly enhances the results of the 2D one.
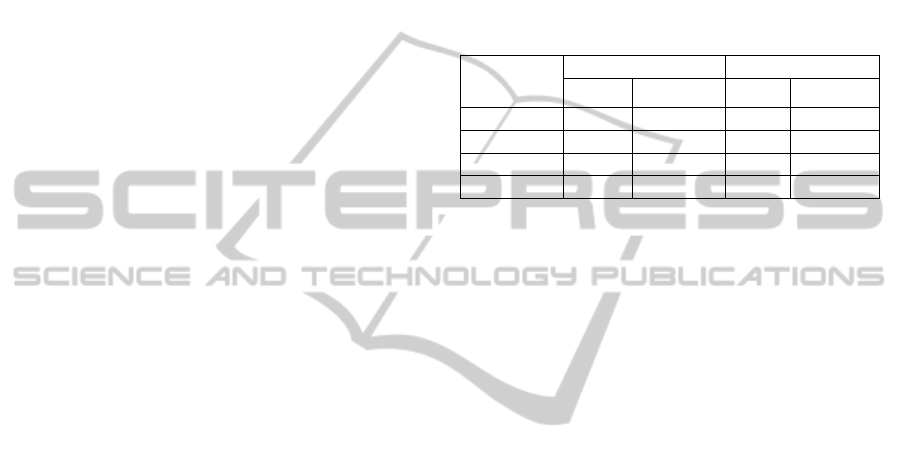
4 HW IMPLEMENTATION
The focal point of the present paper is the
implementation and the testing of the algorithm onto
the EPU that will be mounted on board the actual
UAV, see figure 2. The communication among the
various subsystems of the UAV is based on a CAN
(Controller Area Network) bus, a communication
tool among devices and microcontrollers without the
need for a host computer, typically in the automotive
milieu.
Since the aim is to test the algorithm running on
the EPU, all the other components have been
simulated. The overall organization of the developed
system is depicted in figure 3. The graph can be
logically separated into three different parts: in the
centre the UAV subsystems (i.e. the EPU running
the algorithm and all the other avionic components:
GPS, altimeter, etc.); in the left part the ADS-B
subsystem still on board the UAV; in the right one
the UAV simulator. Actually the “other avionics”
box is here not considered since its data can be
obtained directly from the simulator telemetry via its
CAN interface.
Hardware-in-the-loop simulations have been
performed, i.e. experiments similar to those
described in the previous section with the main
difference of having the EPU, and the ARCA
algorithm on it, controlling the autopilot and thus the
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
180
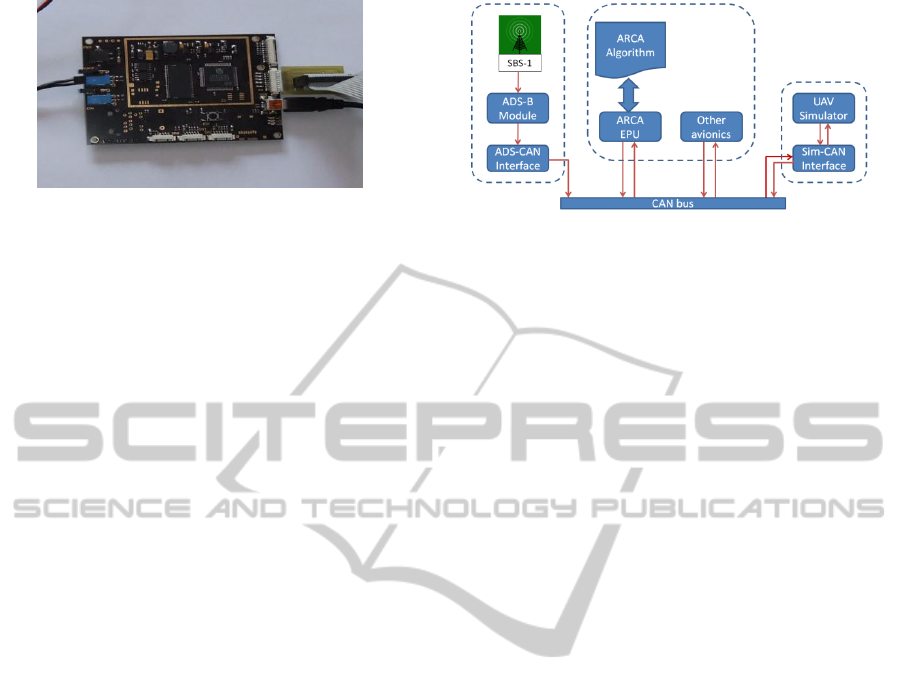
Figure 2: The EPU board with the CAN bus on is left.
simulated UAV. Once that the EPU overcomes the
tests, it may be plugged-in aboard the actual physical
UAV.
The integration work has been distributed in the
three different areas shown in figure 3: ADS-B
interface; embedded algorithm implementation;
simulation interface. The two interfaces are needed
in order to furnish data to the EPU through the CAN
bus, while the algorithm has been embedded through
the EPU development kit.
The management of everything concerning the
CAN bus has been approached via the CANOpen
standard (CANopen Wiki, 2012) and specifically
through the use of the CanFestival open source
software project (CANFestival.org, 2012). The use
of such an instrument allows for a relatively easy
realization of all the CAN bus standard details, such
as device heartbeat, data dictionaries, callback
functions etc.. The algorithm needs to fetch all the
relevant ADS-B data made available by the
interface, it also needs the UAV telemetry data from
the simulator and should write onto the simulator the
proper steering commands. In order to be certain of
the complete arrival of ADS-B data, a callback
function strategy has been implemented over the
CAN bus communication. The first datum written by
the ADS-B interface is the number of civilian
aircraft in the area. As soon as data from an aircraft
is written to the EPU, the callback function updates
a data counter; when this data counter becomes
equal to the number of aircraft the algorithm can be
started.
Some early experiments have been conducted
showing the separate functionality of every part of
the system. Finally the EPU has been made actually
control a UAV simulation. Two kind of experiments
have been repeatedly carried out: in the first two
UAVs (one controlled by the EPU and one freely
flying in a straight line) are made fly one against the
other with no external civilian traffic considered; in
the second the same situation is considered but with
the actual civilian traffic taken into account.
In both cases the EPU is capable to steer the
UAV off the other’s route making it safely fly to its
Figure 3: The hardware-in-the-loop system architecture.
final destination. In traffic conditions, ARCA is able
to make the UAV avoid all the aircraft, both UAV
and civilian ones (with the limitations exposed in
section 3.2). The behaviour of the EPU is practically
indistinguishable from the one of the software
implementation of the algorithm.
5 CONCLUSIONS
In this work it has been briefly reviewed the ARCA
algorithm. Several simulated flight trial experiments
have been presented showing that this approach can
provide acceptable performance in ensuring
separation and trajectory efficiency.
The implementation of this algorithm onto a
flight ready embedded processing unit (EPU) has
been described, presenting some of the hardware and
software details. The final outcome of this effort is a
hardware physical component that can be directly
plugged in the avionic system of a UAV.
The presented operative tests of the hardware
component show that the ARCA EPU is capable of
piloting a simulated UAV in a simulated flight test
scenario, i.e. it safely maintains the UAV separated
from all the other air traffic present in the area, both
UAV and civilian one. The algorithm hardware
implementation has the same performance as the
software simulations.
From the control strategy point of view, the
implemented algorithm is a hierarchical multi agent
control system based on Satisficing Game Theory. It
is well known that the symmetrical cooperative
algorithms for separation assurances give near
optimal solutions in term of global efficiency
(Porretta et al., 2010). This algorithm uses instead a
ranking in priority which may better reflect the real
world situation. The ARCA algorithm (in its full
version) features a dynamical computation of the
priority ranking based on different flight
considerations. Another key aspect is that the ARCA
algorithm does not need information exchange
Hardware on-Board Implementation of a Possible Solution to Introduce UAVs into Non Segregated Areas
181

among the various agents in the scene, but only the
passive collection of already available ADS-B flight
data. This distributed multi agent control system can
be exploited in different fields. Presently it is being
considered for the collaborative control of truck
traffic in restricted areas such as freight logistic
centres and for the cooperative control of robotic
underwater swarms.
ACKNOWLEDGEMENTS
This work has been developed within the Adaptive
Routing and Conflict Management for UAVs
(ARCA) project, funded by the EUROSTARS
Programme of the European Commission.
The authors wish to thank Dr. Luigi La Porta for
the helpful discussions and enlightening
collaboration on the CANOpen and CANFestival
related issues.
REFERENCES
Bellomi F., Bonato R., Nanni V., Tedeschi A., 2008.
Satisficing Game Theory for Conflict Resolution and
Traffic Optimisation. Air Traffic Control Quarterly,
Vol. 16, no. 3, 211-233.
Boyan J., Littman M., 1994. Packet routing in dynamically
changing networks: A reinforcement learning
approach. in Advances in Neural Information
Processing, Systems - 6, 671–678. Morgan Kaufmann.
CANFestival.org, computer software, 2012. Available
from: http://www.canfestival.org/, [24 February 2012]
CANopen Wikipedia, 2012. Available from: http://en.
wikipedia.org/wiki/CANopen, [24 February 2012]
Carbone C., Ciniglio U., Corraro F. Luongo S., 2006.
Decision-Making Algorithms for Aircraft
Autonomous Collision Avoidance. In Proc of 5
th
EUROCONTROL Innovative Research Workshop &
Exhibition, Bretigny-sur-Orge, France.
Carbone C., Ciniglio U., Corraro F., Luongo S., 2007.
Autonomous Aircraft Separation Assurance And
Collision Avoidance Algorithm. In Proc of the 7th
ATM R&D Seminar, Barcelona, Spain.
Choi S. P. M., Yeung D. Y., 1996. Predictive Q-routing: A
memory based reinforcement learning approach to
adaptive traffic control. In Advances in Neural
Information Processing Systems - 8, 945–951. MIT
Press.
ICAO International Civil Aviation Organization, 2011.
Circular 328.
JSBSim.sourceforge.net, computer software 2012.
Available from: http://jsbsim.sourceforge.net, [24
February 2012].
Kinetic Avionic website, 2012. Available from: http://ww
w.kinetic-avionics.com, [24 February 2012].
Lukovic M., 2011. The Future of the Civil and Military
UAV Market, in Frost & Sullivan Market Insight, 28
June 2011.
MIDCAS project website, 2012. Available from: http://
www.midcas.org, [24 February 2012].
Porretta M., Schuster W., Majumdarand A., Ochieng W.,
2010. Strategic Conflict Detection and Resolution
Using Aircraft Intent Information, The Journal Of
Navigation, 63, 61–88.
Roch J. L., 2008. AIR4ALL: Feedback from
Questionnaire and Workshop 1, EUROCONTROL,
Brussels, 6 May 2008.
Schneider D., 2011. Top 11 Technologies of the Decade –
Drone Aircraft. IEEE Spectrum, vol 48, no. 1, p 43,
January 2011.
SESAR project website, 2012. Available from: http://
www.sesarju.eu/programme/workpackages
Stamper W., 2005. Understanding mode S technology.
Defense Electronics.
Stirling W. C., 2003. Satisficing Games and Decision
Making: With Applications to Engineering and
Computer Science. Cambridge University Press, 2003.
Taurino D., Frau G., Beato V., Tedeschi A., 2011. ADS-B
Based Separation Support for General Aviation. In
Proceedings of ATACCS, Barcelona, Spain, 26-27
May.
Taurino D., Taraglio S., Tedeschi A., Pasquini A., Nanni
V., 2010. Increasing the Autonomy of Unmanned
Aircraft Vehicles with a Game Theory Approach. In
Proc of Intl. Conf. on Intelligent Unmanned Systems,
Bali, Indonesia, Nov 3-5.
Taurino D., Tedeschi A., Sanchez A., Flores A., Sysala R.,
Suchanek P., Nanni V., Taraglio S., 2010. Adaptive
Routing and Conflict Management for Unmanned
Aircraft Vehicles. In Proc of Robotics and
Applications (RA2010), Boston, Mass. USA, Nov 1-3.
Wolpert D., Wheeler K., Tumer K., 1999. Automated
design of multi-agent systems. In Proc. of the 3rd Int.
Conf. of Autonomous Agents.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
182
