
False Positive Outliers Rejection for Improving
Image Registration Accuracy
Application to Road Traffic Aerial Sequences
Ines Hadj Mtir
1
, Khaled Kaâniche
1
, Pascal Vasseur
2
and Mohamed Chtourou
1
1
Intelligent Control, Design and Optimization of Complex Systems, ENIS, University of Sfax, Sfax, Tunisa
2
Laboratoire d’Informatique, du Traitement de l’Information et des Systèmes, LITIS, University of Rouen, Rouen, France
Keywords: Outliers Rejection, Features Matching, Image Registration, Motion Compensation, Vehicles Detection,
Aerial Sequences.
Abstract: The objective of our system is to detect vehicles from aerial sequences. Theses sequences are taken from a
camera mounted on UAV which flies over roads and highways. Our approach is to firstly compensate the
motion introduced by the dynamic behaviour of the camera. This leads us to a problem of image
registration. The moving regions (vehicles) are after that extracted using residual motion. The aim of this
paper is to present a combined method for features matching and outliers rejection to increase the accuracy
of the registration phase. We use first, the SIFT descriptors and then outliers are rejected using geometric
constraints. This leads to a better registration and a minimum of false alarms in the detection phase.
1 INTRODUCTION
Image registration is widely used in remote sensing,
cartography, medical image registration, image
mosaicing computer vision application and pattern
recognition (Zitova and Flusser, 2003). Multi-modal
image registration (brain CT/MRI images or whole
body PET/CT images) is mostly used for medical
application to obtain a more complex and detailed
scene or to follow the evolution of a tumor. Viola
and Wells 1997 uses mutual information as a
criterion to register medical images using gradient
descent optimization method. An overview of
medical image registration techniques can be found
in (Whawahre et al., 2009).
Template registration is used to localize a
template in the scene or to register aerial or satellite
images to GIS map (Nakagawasai and Saji, 2011).
Another application of image alignment is multi-
view point registration which aims to panorama and
mosaic construction (Kang and Ma, 2011). In their
paper (Vivet et al., 2011) proposed a new mosaic
creation method named direct local indirect global
registration (DLIG), the registration is iteratively
computed by sequentially imposing a good local
match and global spatial coherence. They compared
their DLIG method to frame to frame and frame to
mosaic registration method and proved better
performance in reducing the accumulation error
problem. A tutorial on image alignment and
stitching has been proposed in (Szeliski, 2006).
Azzari, 2007, proposed a real time image mosaicing
method which is divided on to step: Frame to Frame
registration, using SIFT features and RANSAC to
eliminate outliers, and a Frame to Mosaic
registration to refine the result and eliminate
photometric misalignment, using a histogram
specification approach.
To detect changes or moving object in the scene,
multi-temporal registration is needed, it uses
different images taken from the same scene but
taken at different time. In our application we have at
the same time a change in the point of view, as the
camera is mounted on an unmanned aerial vehicle
(UAV), and also a multi-temporal image capture. So
before the detection of the moving objects
(vehicles), a phase of dominant motion
compensation is needed. A geometric transformation
has to be determined to estimate the transformation
between a reference frame I0 at time t and the target
one I1 at time t+1. Once consecutives images are
registered, the detection of moving objects is
intuitively obtained by residual motion estimated
from the optical flow field deduced from the image
Brightness Constancy Equation (IBCE) (Medioni et
al., 2001).
274
Hadj Mtir I., Kaâniche K., Vasseur P. and Chtourou M..
False Positive Outliers Rejection for Improving Image Registration Accuracy - Application to Road Traffic Aerial Sequences.
DOI: 10.5220/0004038102740279
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 274-279
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

The purpose of our algorithm is to reduce the
incorrect matches rate and improve the accuracy of
the registration phase. Our scenes contain some
moving objects but the transformation has to
estimate the motion of the image background. The
existing methods of feature matching try to reject
outliers. But, in our case, we need to reject false
positives matches which are detected on the moving
objects. This can biases the estimation of the
background motion. So we introduce a geometric
criterion to eliminate false positive and false
negative matches which are respectively: incorrect
matched points and correct matched points attached
to moving objects.
The paper is divided as follows: in section 2 we
have an overview of global and local image
registration techniques. In section 3 we present a
formulation of the registration problem. A
description of the traditional image registration
algorithm and our proposed amelioration which adds
geometric criterion are explained in section 4.
Section 5 presents some experimental results.
2 PREVIOUS WORKS
Image registration can be approached with global or
local method. The global one consists in optimizing
a certain criterion until obtaining a geometric
transformation which fits correctly the two
registered frames. Used criterion is usually the sum
of squared difference (SSD) of the whole image
luminance, the correlation or the mutual
informationetc. (Whawahre et al., 2009). These
methods need textured surface and are very time
consuming since they work on the total number of
pixels of the image. They can also be sensitive to the
luminosity change of the image (SSD), can not
handle a very large rotation, translation or scale
changes and can easily fall into a local minimum.
Local methods are usually divided into four
steps: feature detection, feature matching,
transformation function estimation and image re-
sampling. A review of image registration approaches
can be find in (Zitova and Flusser, 2003; Xiong and
Zhang, 2009a; Xiong and Zhang, 2010). Features
can be edges, corners, lines, regions or a
combination between them. These methods are less
consuming time as they work with some relevant
and reliable part of the image. Many features points
have been proposed and improved all over the time:
Moravec, Harris and Stephens, Trajkovic, SUSAN
detector.
Every time the detectors try to be less sensitive
to noise, invariant to affine transformation and
rotation or scale changes. Laplacian of Gaussian and
Difference of Gaussian are invariant scale blobs
detector, on which, is based the most known and
robust features detector: SIFT (Scale invariant
feature transform) (Lowe, 2004). Govender, 2009
showed that SIFT is one of the best distinctive
detector. The requirements of a feature detector are:
Every ected; No false alarm
must be detected; Points must be well localized,
Detector must have a high repeatability rate (stable
between different images); Detector must be
insensitive to noise, Invariant to rotation and scale
changes and finally; Detector must have a reduced
algorithmic complexity for the real time application.
Once the features are detected, the next step is
feature matching. Matching can be done using a
similarity criterion between two window centred on
the feature point like SSD, NCC (normalized
co But this
window is only adapted for distortion caused by a
translation. Those similarity criterion can also be
sensitive to noise and illumination change, as well
that they need textured regions.
Invariant descriptors are well adapted to describe a
feature point. Schmid, 1992 proposed an eight
components descriptor based on different derivatives
order of the luminance function. Lowe proposed, in
addition to the features detector SIFT, a 128 elements
descriptor estimated from gradient oriented
histograms. Many other variant of the SIFT
descriptors has been also proposed: RIFT (Lazebnik
et al., 2004), PCA-SIFT (Ke and Sukthankar, 2004),
GLOH (Mikolajczyk and Schmid, 2005), GRIFT
(Sungho et al., 2006) and SURF (Bay et al., 2006).
These variants have increased its robustness,
distinctiveness and even reduced its descriptor size
(PCA-Sift and GLOH). Mikolajczyk and Schmid,
2005 compared some local descriptors and proved
that SIFT and GLOH present the highest matching
accuracy.
Feature descriptor must be: Invariant: the same
point in different frame must have the same
descriptor; Unique: two different points must have
two different descriptors; Stable: the descriptor of
the same primitive but with some scale or rotation
change must be the same as the original one;
Independent: if the descriptor is a vector, its
elements have to be independent (generally not
feasible).
False Positive Outliers Rejection for Improving Image Registration Accuracy - Application to Road Traffic Aerial
Sequences
275

3 PROBLEM FORMULATION
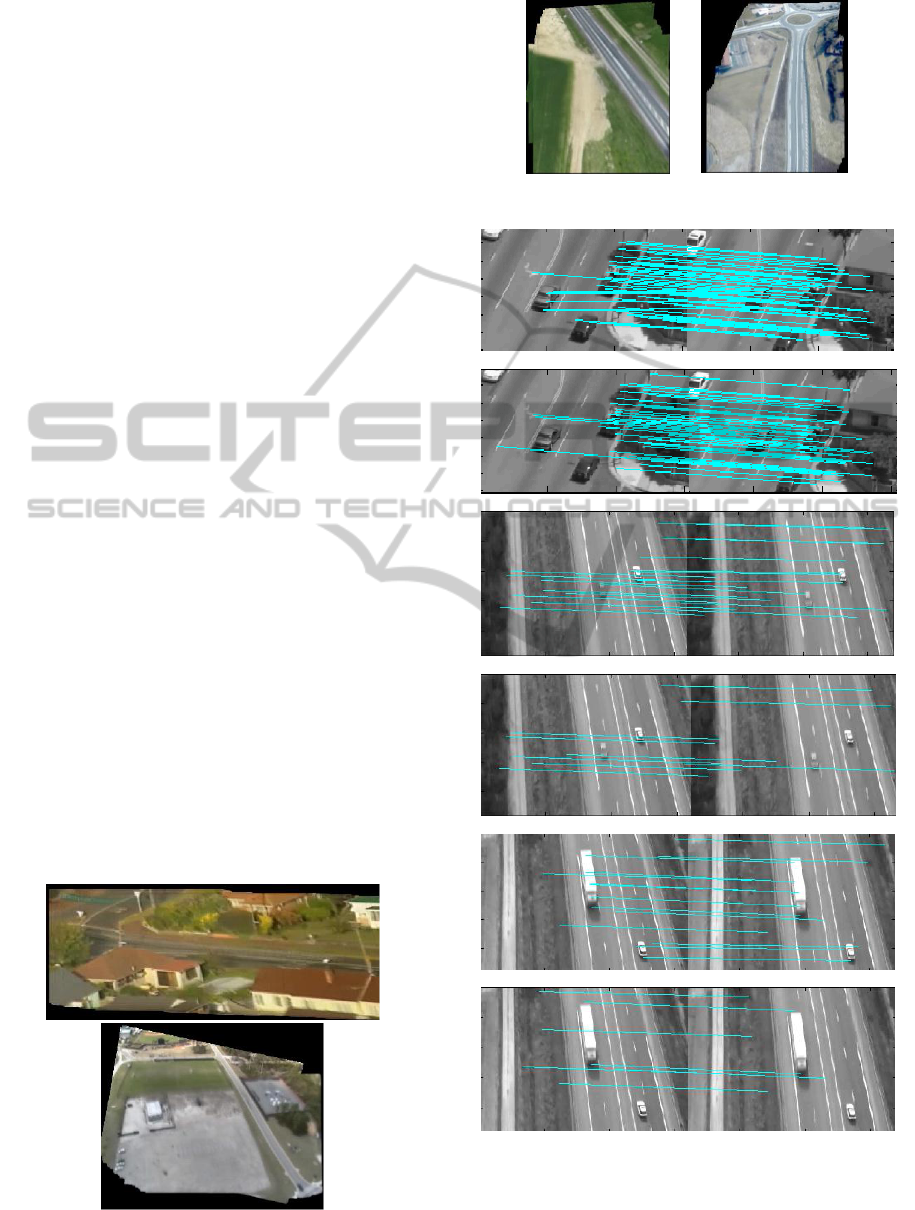
In our application (see figure 1) the UAV flies over
roads and highways with sometime a very low
altitude. So the scene is generally not textured and
presents a very low number of potential feature
points. Also as it is presented in figure 1; with a low
altitude vehicles take an important part from the
image information. And many features points are
concentrated on these moving objects. Or we aim to
estimate a geometric transformation of the
background between two consecutive frames.
Traditional detectors, SIFT and its variants, will
correctly detect and match these points. But we need
to reject these false positive outliers to only estimate
the background motion.
Figure 1: Top: Results of the SIFT detector. Bottom: The
result of the matching process.
Many approaches have been presented in order
to reject outliers. RANSAC is widely used for
outliers rejection. This is an iterative method to fit a
geometrical model to the dominant number of
points. The accuracy of this method is inversely
proportional to the percentage of the outliers. It does
not work when there are more then 50% of outliers,
except that, this can be usually our case: with non-
textured images and with low altitude a high rate of
features will be concentrated on vehicles.
Spatial relation must be added to separate the
false positive and false negative outliers from the
true positives ones. ICP iterative closest point (ICP)
(Besl and Mckay, 1992) is another simple iterative
approach to find rigid transformation but which need
a good initial estimation to guarantee a convergence
to the correct solution. Then probabilistic methods
have been proposed to overcome this limitation like
in (Luo and Hancock, 2001; Liu , 2012; Saromà et
al., 2010) where they use a graph matching
algorithm to integrate a spatial solution.Our
application has to be a real time one: before the
capture of the next frame, the system must have
already detected the vehicles between the last two
frames. So we need an efficient and a fast image
registration step.
We propose to combine the matching phase of
the SIFT algorithm with a spatial verification
approach to eliminate the incorrect matched points
due to the aperture problem, the non-textured
environment and the repeatability of the road marks.
Also to eliminate the false positive feature points
above moving objects.
4 IMAGE REGISTRATION
ALGORITHM
4.1 SIFT and RANSAC Algorithm
We compared the performance of our algorithm to a
traditional one for image registration: keypoints are
detected and matched using SIFT descriptor (figure 1)
then RANSAC is applied to fit the adapted
homography transform to register two successive
frames (Martin et al., 1981; Brown and Lowe 2002;
Azzari, 2007; Wei et al., 2008).
RANSAC is now applied to fit the best
geometric transform which wrap the target image I1
to the reference one I0. From the set of keypoint
matched at least 4 not collinear pairs are randomly
extracted and an estimation of the homography
matrix (3x3) is estimated, All other data are then
tested against the estimated model and, if a point fits
well to this homography, it will be considered as a
hypothetical inlier.
This is repeated until a good estimated model is
found and when sufficiently points have been
classified as hypothetically inliers.
Homography is a 3x3 projective matrix which
wrap a feature point P1 in I1 with coordinate (u
1
,v
1
)
to its correspondent one P0 in the reference frame
I0. Theoretically P0=H P1, H is estimated with a
direct linear transform DLT (1):
(1)
The last step is to register the target image to the
reference one, an interpolation is necessary as many
pixel coordinate will not be found with the
transformation X
1
=H X
2
.
Figure 6 present some result of matching keypoint
with this algorithm. We can often see the high rate of
false positive matched point above vehicles.
This low precision of the SIFT-RANSAC
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
276

Figure 2: The triangle descriptor estimation.
algorithm will give a biased homography function
and so a low accurate image registration step.
4.2 Geometric Filtering Method
As explained in the last section false negative and
positive matches are not correctly rejected. We
propose to add after the SIFT matching step a
verification step based on spatial criterion. In fact for
each matched point P1 from the reference image we
take randomly 2 others not collinear points (P2, P3)
from the same image (figure 2) and estimate a
descriptor vector V with:
(2)
d1, d2 and d3: are the Euclidian distance
respectively between the points (P1, P2), (P1, P3)
and (P2, P3). The angles are found from the cosine
and sinus which are estimated from the scalar and
dot product of the vectors
,
and
.
C1 and C2 are the correlation coefficients between 2
windows (5x5) centred on the feature points.
P1, P2 and P3 in the target image, we estimate the
. The pair of points (P1, is
supposed to be correctly matched if the Mahalanobis
under a certain threshold. For a more robust outliers
rejection step we repeat this process K times (K=3),
if the pair of point is at least K-1 times identified as
a correct match, it will be accepted as inlier.
The advantage of this method is that if a pair of
point is not correctly matched with the SIFT
descriptor the triangle (P1, P2, P3) will not be equal
to the correspondent one . We notice
also that the triangle descriptor vector is invariant to
rotation, translation and scale factor. We see in
figure 3 an example of a correct matched point
(figure 3.a) and a false positive matched point
(figure 3.b). In our case vehicle feature points are
considered as incorrectly matched, so even if P1 and
P1(features points detected on vehicles) are
correctly matched with the SIFT descriptor we can
reject them by taken in account spatial information.
Figure 6 shows some example of amelioration of
(a)
(b)
Figure 3: (a) A case where points are correctly matched.
(b): A case where points are not correctly matched.
the matching results in front of the result obtained
with the SIFT+RANSAC algorithm.
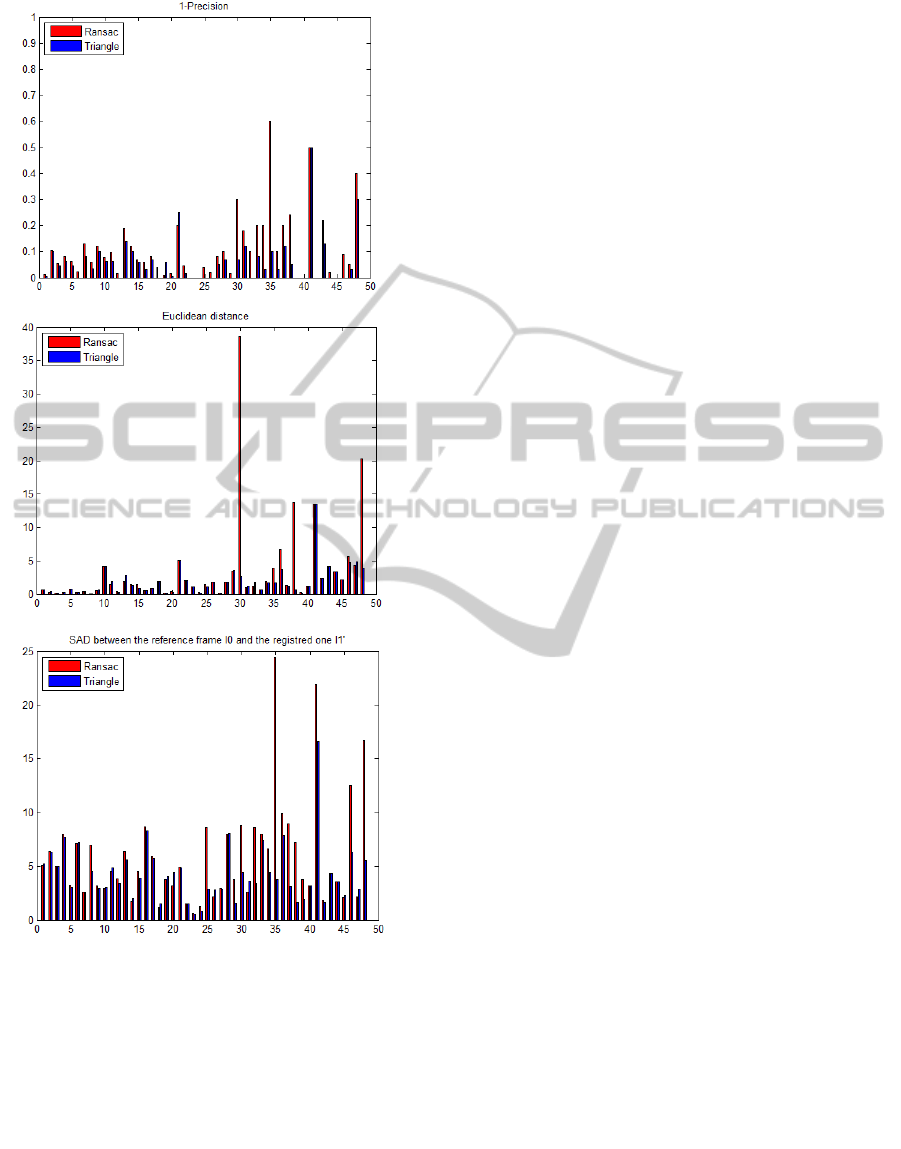
5 EVALUATION
To compare the performance of both algorithms a
precision rate is estimate (figure 4.a):
1 - Precision=1-
(3)
We took also a point P with coordinate (u, v) and
estimate the coordinate of the corresponde
with the homography obtained with RANSAC
algorithm HR, triangle algorithm HT and a manual
estimated one HM. The Euclidian distance between
HM is estimated and compared to the result found
with the HT homography (figure 4.b).
The last comparison is done with the estimation
of the normalized SAD (Sum of Absolute
Difference) error between the reference frame and
the wrapped one obtained with the HR and then with
the HT homographies. (figure 4.c). We evaluated
both algorithms on 48 samples from our data base
image sequences.
Figure 4 shows how our algorithm outperforms
the RANSAC one. In fact it has a very high
precision rate even in the case of low altitude and
homogonous frames. Not only are the false matches
eliminated, but also the false positive feature points.
Mosaics are also created to show the efficiency
of our method. Figure 5 presents some mosaics
obtained from aerial sequences. Frame to mosaic
registration is used to eliminate the accumulation
error. We show that mosaics present too few
distortions. With an efficient image registration step,
moving objects are easier to find and less false alarm
are detected.
False Positive Outliers Rejection for Improving Image Registration Accuracy - Application to Road Traffic Aerial
Sequences
277
(a)
(b)
(c)
Figure 4: Evaluation. a): 1- Precision. b): Euclidian
distance. c): SAD.
6 CONCLUSIONS
Image registration step is very important to assure
good moving object detection. We proposed in this
paper a solution to reject false negative and false
positive matched point a find an optimal geometric
transformation which correctly wraps a target image
to a reference one. Our performance comparison
showed a higher amelioration especially in the
precision rate. With a low computational consuming
time (in the same order than the RANSAC one, in
the order of 1s) we proposed a simple and efficient
solution to reject outliers.
REFERENCES
Azzari P., 2007. General purpose real-time image
mosaicing, appeared in the poster session of ICVSS.
Bay H., Tuytelaars T., Gool L.V., 2006. SURF: Speeded
Up Robust Features, Proceedings of the ninth
European Conference on Computer Vision. 404-417.
Besl P., Mckay N.,1992. A method for registration of 3-D
shapes. IEEE Trans. Pattern Anal. Mach. Intell., vol.
14, no. 2, 239256.
Brown M., and Lowe D. G., 2002. Invariant features from
interest point groups. British Machine Vision
Conference, BMVC 2002, Cardiff, Wales. 656-665.
Govender, N. 2009. Evaluation of feature detection
algorithms for structure from motion. 3rd Robotics
and Mechatronics Symposium (ROBMECH). Pretoria,
South Africa, 810,4.
Kang P., Ma H., 2011. An Automatic Airborne Image
Mosaicing Method Based on the SIFT Feature
Matching. Multimedia Technology (ICMT), 155159.
Ke, Y., Sukthankar, R., 2004. PCA-SIFT: A More
Distinctive Representation for Local Image
Descriptors. Computer Vision and Pattern
Recognition, 506 513.
Lazebnik, S., Schmid, C., and Ponce, J. 2004, Semi-Local
Affine Parts for Object Recognition, Proceedings of
the British Machine Vision Conference, 779788.
Liu Z. An J., Jing Y., 2012. A Simple and Robust
Feature Point Matching Algorithm Based on
Restricted Spatial Order Constraints for Aerial Image
Registration. Geoscience and Remote Sensing, IEEE
Transactions V (50) Issue: 2, 514527.
Lowe, D. G., 2004. Distinctive Image Features from
Scale-Invariant Keypoints, International Journal of
Computer Vision, 60, 2, 91110.
Luo B., Hancock E. R., 2001. Structural graph matching
using the EM algorithm and singular value
decomposition, IEEE Trans. Pattern Anal. Mach.
Intell., vol. 23, no. 10, 11201136.
Martin A. Fischler, R., Bolles, C., 1981. Random Sample
Consensus: A Paradigm for Model Fitting with
Applications to Image Analysis and Automated
Cartography, Comm. Of the ACM, vol. 24, 381395.
Medioni G., Cohen I., Bremond F., Hongeng S., and
Nevatia R., 2001. Event detection and analysis from
video streams, IEEE Trans. Pattern Analysis and
Machine Intelligence, 873-889.
Mikolajczyk, K., Schmid, C., 2005. A performance
evaluation of local descriptors, IEEE Transactions on
Pattern Analysis and Machine Intelligence, 10, 27,
16151630.
Nakagawasai T., Saji H., 2011. Method of registering a
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
278
time sequence of aerial images and a digital map using
a satellite image. IEEE Geoscience and Remote
Sensing Society, Vancouver, 33583361.
Sanroma G., Alquezar R., Serratos F., 2010. A Discrete
Labelling Approach to Attributed Graph Matching
Using SIFT Features. 20th International Conference
on Pattern Recognition. 954-957.
Schmid C., 1992. Appariement d'Images par Invariants
Locaux de Niveaux de Gris. Doctoral Thesis, Institut
National Polytechnique de Grenoble.
Sungho, K., Yoon K. J., Kweon I. S. 2006, Object
Recognition Using a Generalized Robust Invariant
Similarity, Conference on Computer Vision and
Pattern Recognition Workshop (CVPRW'06). 193.
Szeliski R., 2006. Image Alignment and Stitching: A
Tutorial, Handbook of Mathematical Models in
Computer Vision, Springer, 273292.
Viola, P., Wells, W. M., 1997. Alignment by
maximization of mutual information. International
Journal of Computer Vision, 24 , 137154.
Vivet M., Martinez B., Binefa X., 2011. DLIG: Direct
Local Indirect Global alignment for Video Mosaicing.
IEEE Transactions on CSVT. 21(12): 18691878.
Wei W., Jun H., and Yiping T., 2008. Image Matching for
Geomorphic Measurement Based on SIFT and
RANSAC Methods. in Proc. CSSE (2).317-320.
Wyawahare, M. V., Patil, P. M., Abhyankar, H. K., 2009.
Image Registration Techniques: An overview.
International Journal of Signal Processing, Image
Processing and Pattern Recognition, 2, 15.
Xiong, Z. and Zhang, Y., 2009a. Image registration,In:
Encyclopedia of Geography. Sage Publication.
Xiong, Z. and Zhang Y., 2010. A critical review of image
registration methods, International Journal of Image
and Data Fusion, 1:2, 137-158.
Zitova, B. Flusser, J., 2003. Image registration methods: a
survey. Image and Vision Computing, 21, 9771000.
APPENDIX
Figure 5: Some image mosaicing results.
Figure 5: Some image mosaicing results (cont.).
SIFT+ RANSAC Result
SIFT+ Triangle Result
SIFT+ RANSAC Result
SIFT+ Triangle Result
SIFT+ RANSAC Result
SIFT+ Triangle Result
Figure 6: Results of the matching process.
False Positive Outliers Rejection for Improving Image Registration Accuracy - Application to Road Traffic Aerial
Sequences
279
