
New Robust Controller Synthesis Optimization Methodology under Six
Sigma Constraint
J. Frechard
1
, D. Knittel
1,2
and J. Renaud
1
1
LGeCo, INSA, 24 Boulevard de la Victoire, 67084 Strasbourg, France
2
Institute of Physics and Engineering, University of Strasbourg, 17, Rue du Mar
´
echal Lef
`
ebvre, 67100 Strasbourg, France
Keywords:
Six Sigma Controller Synthesis, Design For Six Sigma, Robust Optimization, Robust Control, Hinfinity
Synthesis, Roll-to-roll Systems.
Abstract:
Industrial systems usually contain uncertain parameters. These uncertainties come from lack of knowledge
of physical phenomena or from evaluation difficulties. The stochastic behaviour of these parameters have to
be taken into account during the design process of industrial systems. To tackle with these uncertainties, the
Design for Multi-objective Six Sigma method is used. This method permits to fix six sigma constraint and it
is applied on the synthesis of web tension controller for an industrial large-scale roll-to-roll system. The key
idea is to synthesize the controller in frequency domain by Hinfinity synthesis. Then the six sigma constraint
is fixed on output web tension in time domain. The robust controller synthesis is then compared with standard
Hinfinity synthesis approach. This paper presents for the first time a controller synthesis including six sigma
constraints.
1 INTRODUCTION
Real world optimization problem usually contains un-
certainties. These uncertainties come from non mod-
elled dynamics or from a lack of knowledge of the
phenomena. Moreover, some parameters can be dif-
ficult to estimate and can vary with time. Due to
these uncertainties the value of performance criterion
can be very different of the expected one. Some in-
dustrial applications deal with high parameter varia-
tions depending on the processing conditions. Usual
optimization methodology only considers the design
performance without taking into account parametric
uncertainties. It is compulsory, for application with
uncertain parameters, to consider the parametric ro-
bustness of design. Performance and parametric ro-
bustness are antagonist objectives, that means that the
improvement of one of them leads to the damage of
the other. Therefore, a multi-objective approach has
to be used. The key idea is to generate a set of val-
ues of uncertain parameters following their distribu-
tion law. The fitness function is calculated for each
value of the set and the mean value and standard de-
viation are given as the objectives to minimize in fre-
quency domain. Then the time domain Pareto frontier
is build and six sigma constraint is fixed on it. This
paper presents for the first time a controller synthe-
sis methodology including six sigma constraint. The
proposed approach is applied to the web tension con-
troller synthesis of a large-scale roll-to-roll system.
Roll-to-roll systems are very common in industry,
they represent a convenient way to handle web mate-
rials such as textile, paper, polymer... The web speed
and web tension are the two keys variables to be mon-
itored and controller. The focus of roll-to-roll systems
is to displace the material web at the expected speed
while keeping the web tension in an acceptable range
around the tension reference. The approach devel-
oped in this paper is applied on a large-scale roll-to-
roll plant that includes a rewinder, an unwinder, two
driven rollers, two pendulum dancers and twenty-five
idle rollers.
PI or PID controllers are commonly used for web
tension control in industrial context, (Gassmann et al.,
2011) proposes a convenient way to synthesize PI web
tension controller using fixed order and structure H
∞
approach using HIFOO (H-Infinity fixed order opti-
mization, (Burke et al., 2006)). This synthesis method
gives good results in term of performances but the ob-
tained controllers are highly sensitive regarding web
elasticity variations.
A new robust design optimisation method is pro-
posed in this paper. For our application, the key idea
is to consider the web elasticity, Young’s modulus, as
an uncertain parameter with a normal law.
Firstly, a short state of the art of robust optimiza-
244
Frechard J., Knittel D. and Renaud J..
New Robust Controller Synthesis Optimization Methodology under Six Sigma Constraint.
DOI: 10.5220/0004045602440249
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 244-249
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

tion is given. Then the proposed multi-objective ro-
bust optimization is presented in details. To finish,
the application to the large-scale roll-to-roll system is
described.
2 ROBUST OPTIMIZATION IN
ENGINEERING
Optimization of mechatronic systems is studied for
several years. A survey of the robust optimization
methods is given in (Beyer and Sendhoff, 2007).
The field of application of robust optimization is
very large. For example, the design of antenna under
decision variable uncertainty is studied in (Ben-Tal
and Nemirovski, 2002). Mathematical programming
methods is used to deal with parametric uncertainty.
Interval programming was successfully imple-
mented for synthesizing modal control in (Khlebalin,
1994). The idea is to give the interval of variation of
each uncertain parameters and to directly take them
into account in the optimization process.
Another robust optimization method that gives
good results in control synthesis using optimal control
is the Kharitonov’s theorem presented in (Toscano
and Lyonnet, 2010). The idea is to verify the stability
of the system afterwards the control synthesis using
the characteristic polynomial of the closed loop sys-
tem.
However, the presented methods can not be imple-
mented for optimization of large-scale systems, due to
high order of the model or lack of algebraic represen-
tation of the fitness function.
The design for six sigma method is studied in
(Koch et al., 2004). The major drawback of this
method is that the sigma level and the limit value
has to be fixed before optimization process runs, and
therefore it is not sure that the problem is solvable.
An interesting method that permits to fix the sigma
level and the limit value after the optimization process
was presented in (Shimoyama and Fujii, 2007). The
idea is to use multi objective optimization in order to
obtain a set of robust designs.
3 MULTI-OBJECTIVE ROBUST
DESIGN OPTIMIZATION
METHOD
The multi-objective design for six sigma methods
needs many evaluations of the fitness function to be
efficient. To measure the performance of mechatronic
K(s) G(s) W
t
W
u
W
p
w
z
e
-
y
M
0
-
Figure 1: Scheme of the S/KS/T synthesis with reference
model M
0
.
systems the H
∞
norm can be used. It gives good eval-
uation of the system behaviour in frequency domain
and have an acceptable computational cost.
3.1 Hinfinity Controller Synthesis
The H
∞
approach enables automatic synthesis of con-
trollers (Gassmann et al., 2009). The H
∞
problem
consists in finding a stabilizing controller K that min-
imize the H
∞
norm of the transfer function between a
set of exogenous inputs w and the performance out-
puts z (see Figure 1).
k
T
w→z
k
∞
< γ (1)
The major drawback of H
∞
approach is the high or-
der of the obtained controller. In fact, the order of the
controller is equal to the sum of the system order and
the weighting functions order. Using a model reduc-
tion approach, the controller order can not always be
reduced with guarantee of stability and performances.
In industrial applications, it is highly relevant to de-
velop a robust design algorithm for PI or PID con-
trollers adjusting. The mathematical problem seems
to be difficult because fixed-order controller synthe-
sis can be formulated as a nonsmooth affine prob-
lem in the nonconvex cone of stables matrix. The
mathematical formulation of such a problem leads
to BMI (bilinear matrix inequalities) solving (Benla-
treche et al., 2006). Recent progress in nonsmooth
algorithm permits to develop relevant synthesis tools
like HIFOO released in 2005 (Burke et al., 2006) and
more recently hinfstruct (Apkarian and Noll, 2006).
One drawback of such approaches is that they do not
take parametric uncertainties into consideration. In
this work, genetic algorithm is used to optimize the
H
∞
norm of the system in order to take into account
uncertainties. The controller is synthesized with out-
put weighting functions; S/KS/T synthesis scheme is
given in Figure 1. Moreover, a reference model M
0
is used. The weighting functions W
p
, W
u
, W
t
and the
reference model M
0
appear in the closed loop transfer
matrix:
T
wz
:=
W
p
(M
0
− T )
W
u
KS
W
t
T
(2)
where S is the sensitivity function:
S = (I + GK)
−1
(3)
NewRobustControllerSynthesisOptimizationMethodologyunderSixSigmaConstraint
245

G represents the system, K is the web tension con-
troller. T is the complementary sensitivity function:
T = I − S (4)
The weighting function W
p
has a high gain at low fre-
quency in order to reject low frequency disturbances.
The form of W
p
is as follows :
W
p
(s) =
s
M
+ ω
B
s + ω
B
ε
0
(5)
where M is the maximum peak magnitude of (M
0
−
T ). ω
B
is the desired frequency bandwidth, ε
0
is the
allowed steady-state error.
The weighting function W
u
is used to avoid large
control signals and to increase the roll-off of the con-
troller output at high frequencies.
W
u
(s) =
1 + τ
1
s
k(1 + τ
2
s)
, τ
1
> τ
2
(6)
The weighting function W
t
increases the roll-off of the
system output at high frequencies.
In industry, tension controllers are generally PI
controllers:
u
ε
= K
p
1 + τ
i
s
s
(7)
where u is the control signal and ε is the error signal.
K
p
and τ
i
are the controller design variables to be op-
timized. The optimization problem can be formulated
as follows :
minimize ||T
wz
||
∞
sub ject to λ < 0
(8)
where ||T
wz
||
∞
is the weighted closed-loop H
∞
norm and λ is the maximum real part of the system
poles (for the linearised system) also called spectral
abscissa.
The uncertain parameter has now to be taken into
account in the H
∞
synthesis.
3.2 Robust Controller Synthesis using
Hinfinity Approach
Robust optimization methodology used in this work
is based on the six-sigma concept introduced by Mo-
torola (Tennant, 2001). The aim is to keep a perfor-
mance index in an acceptable range for a variation of
uncertain parameters of ±6σ, with σ the standard de-
viation. In fact, a six sigma constraint corresponds
to 0.002 defects per millions. In order to solve such
problem, the Design For Multi-Objective Six Sigma
(DFMOSS) described in (Koch et al., 2004) is used.
This methodology was successfully applied in the do-
main of flying vehicule in (Shimoyama and Fujii,
2007) and in the domain of land vehicule (Koch et al.,
2004).
Considering the state-space representation of the
uncertain system:
˙x(t) = A(γ)x(t) + B(γ)u(t)
y(t) = C(γ)x(t) + D(γ)u(t)
(9)
where γ is a set of uncertain parameters with a nor-
mal distribution.
Latin hypercube method is used to generate a set
of sample points around the nominal value of uncer-
tain parameters. Then the robust H
∞
optimization
problem can be defined as follows.
minimize µ
H
σ
H
under λ < 0
(10)
where µ
H
is the mean of the fitness function (the
H
∞
norm in our case) for the set of sample points and
σ
H
is the standard deviation of the fitness function.
This methodology permits to obtain the robust Pareto
frontier and then to fix the sigma level and the up-
per limit constraint after optimization. To deal with
this optimization problem, the MOGA-II algorithm
is used in the modeFRONTIER commercial software
environment.
3.3 Time Domain Pareto Building
The H
∞
optimization process is used to guarantee the
frequency domain system behaviour. Moreover the
H
∞
norm has a very low computational cost. Never-
theless, time domain optimization allows to take into
account the plant non-linearities. It is therefore com-
pulsory to use simulation of the nonlinear model of
the system. Therefore the pseudo-Pareto frontier in
time domain is also build and the six σ constraint
can be applied on it. The non dominated point in
frequency domain can not be used alone. In fact, a
Pareto optimal design in frequency domain (where the
linear model is used), does not guarantee to obtain a
Pareto optimal design in time domain (where the non-
linear model is used. This is also true for the linear
model). A set of points close to the Pareto frontier in
frequency domain has to be chosen and simulated in
order to build the pseudo-Pareto frontier in time do-
main. To select the points useful for time simulation,
an area of the search space is defined. The two anchor
points (an anchor point is a point where one objective
is minimum) are chosen to form a rectangle, this area
can be seen in Figure 2.
If this area contains an acceptable number of de-
signs, about a hundred, they will be all simulated.
Otherwise only some of them have to be selected. In
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
246
0 1 2 3 4 5 6
0
1
2
3
4
5
6
7
8
σ
H
µ
H
Pareto Frontier
Design to Simulate
Other Design
Figure 2: Area around the Pareto obtained from frequency
domain optimization.
order to chose the designs for non-linear time simu-
lation we propose to cut the objective space in differ-
ent areas and to select a point in each of them. The
simulation of the non-linear model can be very time
consuming and therefore the number of designs has
to be limited to one hundred. Moreover, the Pareto
proximity has to be taken into account: a point close
to the Pareto frontier should have a higher probability
to be chosen that a point far from the Pareto frontier.
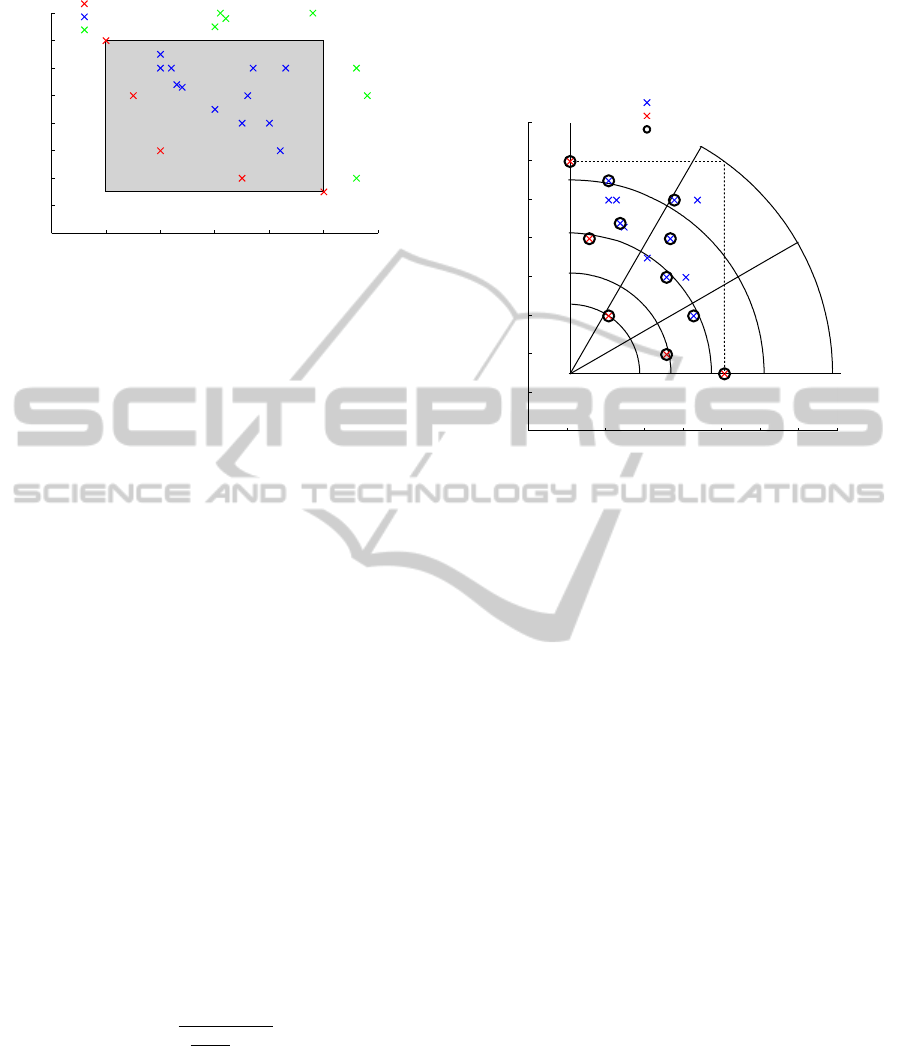
A method to divide the search space around the
Pareto frontier using circles and lines is proposed.
Two points in the objective space have to be de-
fined. Firstly, the UTOPIA point which is an unattain-
able design where all the objectives are minimum.
Secondly, the NADIR point is the opposite of the
UTOPIA point, it corresponds to the point with the
value of the first objective when the second is mini-
mum and vice-versa (see figure 3). These two points
are used for the first step of the cut-out method; the
circular areas cut-out. The UTOPIA point is taken
as circle center, the distance between the utopia point
and the closest point is computed and used as mini-
mum value of the circle radius. The distance between
UTOPIA and NADIR points is used as maximum cir-
cle radius. To guarantee the probability of selection
of a point based on Pareto proximity, the difference
between minimum and maximum radius is divided in
several areas following a non-linear law:
R
i
= R
i−1
+
R
max
− R
min
1−n
nb
1−n
− 1
n
(i−1)
(11)
where R
i
and R
i−1
are respectively the radius of
the considered circle and the radius of the previous
circle. n is a multiplication factor between two con-
secutive spaces, in this work n is equal to 1.3. nb is
the number of circles.
The second phase of the cut-out method uses lines
in order to divide the objective space circles. The an-
gle between the utopia point and the two ANCHOR
points is divided into several areas using a linear law.
Then, in each area a point is chosen using random
search. An example of the obtained areas and selected
designs can be seen in figure 3.
0 1 2 3 4 5 6 7 8
0
1
2
3
4
5
6
7
8
σ
H
µ
H
Design in the Selection Area
Pareto Design
Design to Simulate
UTOPIA point
NADIR point
Figure 3: Example of areas and selected points provided by
the cut-out strategy (frequency domain).
The cut-out strategy permits to guarantee the dis-
persion of the simulated design around the frequency
domain Pareto (the design close to the Pareto have a
higher probability to be selected). The selected de-
signs in the frequency domain are then simulated in
time domain, using the non-linear system model.
3.4 Building of the Time Domain Pareto
Frontier
In order to evaluate performances of time domain
simulations results, many criteria can be used. IAE
(Integral of absolute error) and ISE (Integral of
squared error) are common criteria. In some appli-
cations, the derivative of the error signal can be added
to IAE or ISE criterion to minimize oscillation. In
several specific applications the error signal does not
play a major role but the maximum of the error signal
is the major criterion to minimize.
Then a set of thirty values of each uncertain pa-
rameter is generated using latin hypercube sampling.
The designs selected in the frequency domain Pareto
using the cut-out strategy are simulated for each value
of the uncertain parameters. The mean value µ
J
and
standard deviation σ
J
of the set of fitness are then
calculated. Once the time domain Pareto frontier is
build, the six sigma constraint can be fixed on it:
µ
J
+ 6σ
J
< USL (12)
where USL is the upper acceptable limit of J.
NewRobustControllerSynthesisOptimizationMethodologyunderSixSigmaConstraint
247

Figure 4 shows an example of obtained time do-
main pareto frontier. The red line represents the 6
sigma constraint: the design under it respects the con-
straint (In other words, the criterion J is greater than
the USL value with a probability of only 0.002 per
million). Some applications do not need a so high re-
liability, for them lower sigma level can be used (for
example 3 sigma).
0 1 2 3 4 5 6 7
10
11
12
13
14
15
16
17
σ
J
µ
J
Design Simulated
Pareto Optimal Design
6
σ Constraint
Figure 4: Example of time domain Pareto.
For the choice of the final design, the distance be-
tween the six σ constraint line and each design is com-
puted. The more robust design is the design with the
higher distance. The presented method can now be
applied on a complex large-scale system in order to
synthesize robust controllers.
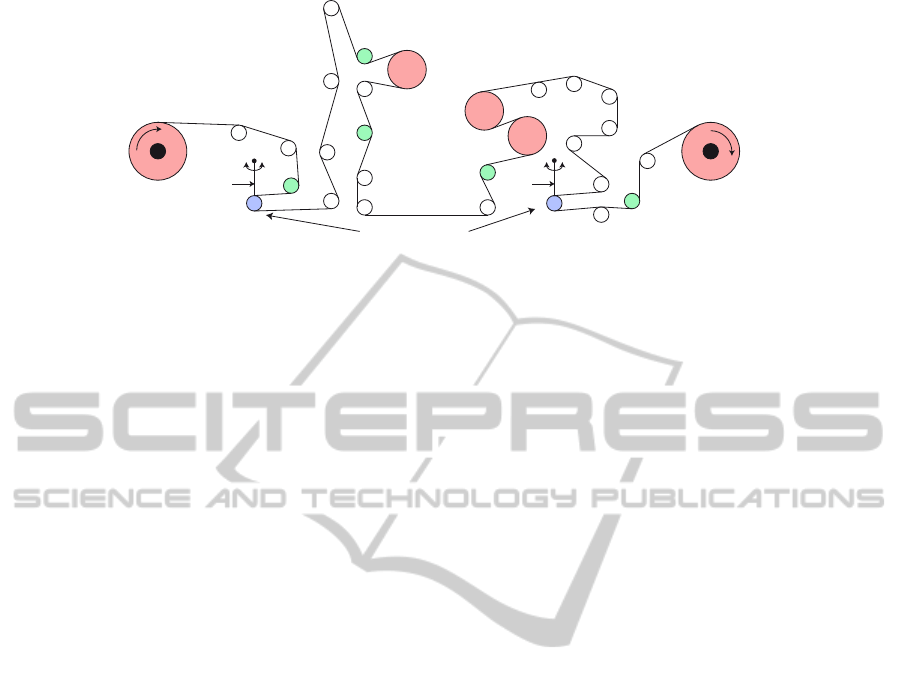
4 APPLICATION TO
ROLL-TO-ROLL SYSTEMS
The proposed approach is applied to the synthesis
of tension controllers of an industrial roll-to-roll sys-
tem. This system is composed of four motor, two
pendulum dancers, thirty rollers and five load cells.
Its model is constructed from the equation describ-
ing the speed of each roller, the web tension between
two rollers and the pendulum dancers angular posi-
tion (Koc et al., 2002) (Gassmann et al., 2009). The
scheme of the system is given in figure 6.
The tension control of roll-to-roll systems is stud-
ied for several years. H
∞
control is used and
gives good performance (Gassmann et al., 2011)
(Gassmann et al., 2009). However, this method does
not take into account the parametric uncertainties.
The approach developped in this work has been
compared with the fixed order and structure H
∞
syn-
thesis using the commercial hinfstruct algorithm (Ap-
karian and Noll, 2006) in the Matlab software envi-
ronment. The results in frequency domain are firstly
compared using the linear model, then the time do-
main simulation are compared for a variation of web
elasticity on the non-linear system model.
The frequency domain and time domain criteria
depicted below are used. The value of each criterion
for the nominal value of web elasticity E
0
, the mean
and standard deviation of each criterion, are calcu-
lated for the set of web elasticity values. A summary
of the results is given in table 1.
Table 1: Criteria comparison between hinfstruct and our ro-
bust design optimization
H
∞
(E
0
) J (E
0
) µ
H
σ
H
µ
J
σ
J
(1) 93 11 94 5 12 1.6
(2) 88 8 116 29.2 84 165
The line (1) corresponds to our presented synthe-
sis method whereas the second line marked (2) cor-
responds to the advanced synthesis using hinfstruct.
One can see that for our approach the first two crite-
ria are a little greater. Therefore the hinfstruct gives
slightly better nominal performances ( for a fixed
nominal web elasticity). However, when web elastic-
ity variations occur, our proposed methodology leads
to better results. In fact, mean values and standard
deviation of the two criteria are lower.
Then the two set of parameters are compared us-
ing non-linear model simulations. The simulation re-
sults are presented for three values of web Young’s
modulus, E
0
/1.5, E
0
and E
0
.1.5 in Figure 5 (interme-
diate web tension).
0 50 100
0
50
Time (Second)
Tension (Newton)
0 50 100
0
50
Time (Second)
Tension (Newton)
Figure 5: Time domain simulation.
For the hinfstruct controller synthesis approach
the system becomes unstable (lower representation
in figure 5) whereas our approach maintains good
performances (upper representation in Figure 5) with
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
248
M
1
M
3
M
3
’
M
4
J
J
J
J
J
F
1
F
2
M
2
RewinderUnwinder
Driven Rollers
Pendulum Dancers
Figure 6: Scheme of the system under study.
web tension errors smaller than 20 N, as expected (six
sigma design).
5 CONCLUSIONS
A new robust controller synthesis method is devel-
oped using six sigma constraint to tackle with para-
metric uncertainties. A set of values of the uncertain
parameter is computed and statical tools are used in
order to build a set of robust design. This set allows to
build the time domain Pareto in order to fix six sigma
constraint in time domain. The Pareto in closed-loop
frequency domain is also calculated. The two Pareto
curves enable to select the best design.
The methodology is applied on a complex large
scale roll-to-roll model of an experimental plant. The
results are compared with advanced commercial ro-
bust controller synthesis (hinfstruct Robust control
toolbox in Matlab software environment). The sim-
ulations show that the proposed methodology leads to
more robust closed loop system performances regard-
ing the uncertain parameter variations.
Future work consist in integrating other parame-
ters in the optimization process, for example mechan-
ical parameters.
ACKNOWLEDGEMENTS
The authors thank Enginsoft France support, specially
A. Poisson, for the help supplied during the imple-
mentation of the proposed method in the modeFRON-
TIER environment.
REFERENCES
Apkarian, P. and Noll, D. (2006). Nonsmooth H
∞
synthesis.
Automatic Control, IEEE Trans. on, 51(1):71–86.
Ben-Tal, A. and Nemirovski, A. (2002). Robust optimiza-
tion : methodology and applications. Mathematical
Programming, 92(3):453–480.
Benlatreche, A., Ostertag, E., and Knittel, D. (2006). H
∞
feedback decentralized control by BMI optimization
for large-scale web handling systems. In American
Control Conference, Minneapolis, USA.
Beyer, H. and Sendhoff, B. (2007). Robust optimization : A
comprehensive survey. Computer Methods in Applied
Mechanics and Engineering, 196(33-34):3190–3218.
Burke, J. V., Henrion, D., Lewis, A. S., and Overton,
M. L. (2006). HIFOO - A MATLAB package for
fixed-order controller design and H
∞
optimization.
In 5th IFAC Symposium on Robust Control Design,
Toulouse, France.
Gassmann, V., Knittel, D., Pagilla, P., and Bueno, M.
(2009). H
∞
unwinding web tension control of a strip
processing plant using a pendulum dancer. In Ameri-
can Control Conference, St. Louis, Missouri, USA.
Gassmann, V., Knittel, D., Pagilla, P. R., and Bueno, M.-A.
(2011). Fixed-order H
∞
tension control in the unwind-
ing section of a web handling system using a pendu-
lum dancer. IEEE Transactions on Control Systems
Technology, (99):1–8.
Khlebalin, N. A. (1994). Control of nonlinear and uncer-
tain systems modal control under interval uncertainty
of parameters. Computational Mathematics and Mod-
eling, 5:44–51.
Koc, H., Knittel, D., de Mathelin, M., and Abba, G. (2002).
Modeling and robust control of winding systems for
elastic webs. Control Systems Technology, IEEE
Transactions on, 10(2):197 –208.
Koch, P., Yang, R.-J., and Gu, L. (2004). Design for six
sigma through robust optimization. Structural and
Multidisciplinary Optimization, 26:235–248(14).
Shimoyama, K., O. A. and Fujii, K. (2007). Multi-objective
six sigma approach applied to robust airfoil design for
mars airplane. In 48
th
Structures, Structural Dynamics
and Materials Conference, Hawaii.
Tennant, G. (2001). SIX SIGMA: SPC and TQM in Manu-
facturing and Services. Gower Publishing.
Toscano, R. and Lyonnet, P. (2010). Robust static output
feedback controller synthesis using kharitonov’s the-
orem and evolutionary algorithms. Information Sci-
ences, 180:2023–2028.
NewRobustControllerSynthesisOptimizationMethodologyunderSixSigmaConstraint
249
