
Autonomous Navigation of an Outdoor Mobile Robot
in a Cluttered Environment
Amir Monjazeb
1
, Jurek Z. Sasiadek
1
and Dan Necsulescu
2
1
Department of Mechanical and Aerospace Engineering, Carleton University, 1125 Colonel By Drive, Ottawa, Canada
2
Department of Mechanical Engineering, Ottawa University, 161 Louis Pasteur, CBY A205, Ottawa, Canada
Keywords: Simulataneous Localization and Mapping (SLAM) Problem, EKF, Unscented Kalman Filter, Fastslam,
Hybridslam, Unscented Hybridslam, Cluttered Environment, Loop Closing, Long Trajectory.
Abstract: This paper proposes a modification of HybridSLAM strategy that is used to navigate an outdoor
autonomous mobile robot in a cluttered environment. HybridSLAM is combining extended Kalman filter
SLAM EKF-SLAM and FastSLAM to take advantage of strengths and to cover shortcomings of both filters.
By the use of an unscented version of Kalman filter instead of EKF-SLAM, the formulation of the
HybridSLAM is revised. Same as HybridSLAM, the new revised algorithm uses the state distribution
capabilities of the unscented Kalman filter to keep the uncertainty of the system to be remembered for a
long trajectory, and at each time step, FastSLAM is used to produce local maps. Presented simulations and
results evaluate the performance of the proposed approach using Unscented Kalman filter in a cluttered
environment.
1 INTRODUCTION
Simultaneous localization and mapping (SLAM)
problem refers to a situation in which a mobile robot
in an unknown environment, incrementally
constructs a navigation map of its surroundings. At
the same time, the robot simultaneously, and with
the observations of features (landmarks), uses this
navigation map for localization (Durrant-Whyte and
Bailey, 2006). Due to the imperfections of the
movement and observation, there are error inputs to
the system. Since location of landmarks and pose of
the robot are highly correlated, there will be
uncertainty accumulated at next time steps to the
extent that it becomes unbounded. To prevent the
accumulation of uncertainty in the system, an
algorithm needs register such errors. Two dominant
approaches to solve SLAM problem are Extended
Kalman filter SLAM (EKF-SLAM) and FastSLAM.
EKF-SLAM has been known as an optimal
solution to SLAM problem for more than two
decades. However, EKF algorithm has the linearity
and Gaussian underlying assumptions and it suffers
form two major problems; computational complexity
and its sensitivity to single hypothesis data
association. FastSLAM, on the other hand, can
better handle non-linearity in the motion and carries
less complexity. FastSLAM is also carrying the
multi hypothesis data association property which
makes it relatively more reliable compare to EKF-
SLAM. Nonetheless, the latter is sensitive in the
presence of accurate sensors and, moreover, over
long vehicle trajectories such as a loop closing
scenario, the algorithm becomes overconfident by
not considering the existing uncertainty. A combined
(Brooks and Bailey, 2009) called “HybridSLAM”
uses a Hybrid mapping to add up strengths of both
filters where the FastSLAM is employed to construct
a local map and reduces the ambiguity of the
motion. However, experimental results prove that
for a very large loop, the use of EKF as a back-end
in HybridSLAM causes a complexity in the
computation of the global map. This paper takes
advantage of the same strategy that was used in
HybridSLAM to combine two filters used as front-
end and back-end but instead of EKF-SLAM, an
unscented version of Kalman filter (UKF) is
combined with a Rao-Blackwellised particle filter. A
loop closing scenario in a cluttered environment is
presented in this study. Several experimental results
are presented and three SLAM strategies are
compared.
485
Monjazeb A., Z. Sasiadek J. and Necsulescu D..
Autonomous Navigation of an Outdoor Mobile Robot in a Cluttered Environment .
DOI: 10.5220/0004047304850488
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 485-488
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 HYBRIDSLAM
By combining EKF-SLAM and FastSLAM (Thrun,
and Montemerlo, 2004), HybridSLAM (HS) was
introduced (Brooks and Baily, 2009). HS is taking
advantage of strengths in both filters and helps to
overcome their limitations and weaknesses. The
resultant algorithm acts as a modified filter. The use
of EKF-SLAM on the side, helps FastSLAM not to
become over-confident. As a result, by combining
EKF-SLAM and FastSLAM, the modified filter
performs much better in comparison with either its
component. FastSLAM needs to be presented as a
continuous (Gaussian) form so that it can be
combined with EKF-SLAM. The modification may
be done in a way that FastSLAM builds local maps
and is allowed to run for long enough to
disambiguate associations. Before the path becomes
so long that particle diversity becomes problematic,
a single dimensional Gaussian is computed from the
FastSLAM posterior. At the end, this Gaussian local
map can be fused into the global map to be
represented as a whole. State of the system in
FastSLAM representation at time step k can be
expressed as
k
x
n
= {
R
k
X
n
,
n
μ
1,k
,
n
σ
1,k
, K ,
n
μ
Mk ,
,
n
σ
Mk ,
}
(1)
and the weighted sample for particle n is:
n
ŵ
k
= P (Z
k
|
n
X
R
k
, Z
1−k
,U
k
, x
R
0
) (2)
Using the two above equations:
k
x
n
={
n
ŵ
k
,
R
k
X
n
,
n
μ
1,k
,…,
n
μ
Mk ,
n
σ
1,k
, K ,
n
σ
Mk ,
}
= {
n
ŵ
k
,(
R
k
x
n
,m),
k
C
n
}
(3)
Equation (3) represents RBPF as a Gaussian mixed
model in which each particle is a Gaussian
component with weight
n
ŵ
k
, mean (
R
k
x
n
,m), and
covariance matrix
k
C
n
. With the use of moment
matching process, the final result of pose of the
robot with covariance
k
C extracted from all
particles can be expressed as
k
x =
∑
n
n
ŵ
kk
x
n
(4)
k
C =
∑
n
n
ŵ
k
[
k
C
n
+ (
k
x
n
−
k
x )(
k
x
n
−
k
x )
T
]
(5)
Since the observation sensor includes noise,
k
C
n
represents the covariance of the map produced by
every individual particle. Due to noisy motion
(
k
x
n
−
k
x )(
k
x
n
−
k
x )
T
represents variation
between the map produced by particles. At each time
step, a new local map is developed by RBPF and
fused into global map (the map produced by EKF-
SLAM).
Constrained Local Sub-Map Filter (CLSF)
technique is used to integrate a local map to a global
map (Williams, Dissanayake, Durrant-Whyte, 2002).
3 UKF VERSUS EKF
The use EKF-SLAM in HybridSLAM has its own
estimation limitations and it has its approximation
issues when facing nonlinearity of the system
(Monjazeb, Sasiadek, Necsulescu, 2011). An
improved version of EKF was introduced and called
unscented Kalman filter (UKF) (Julier, Uhlmann,
2004). Applying UKF in Hybrid SLAM addresses
the approximation issues in constructing a global
map and will result in a more reliable map in the
fusion step. By replacing UKF with EKF in HS the
approximation of the state distribution using a
Gaussian random variable can be done except for the
case where it propagates the state distribution
analytically through the third order linearization of a
non-linear system. EKF optimization may lead to
suboptimal performance resulting in failure of the
filter since it generates substantial error in the
posterior mean and covariance of the system. UKF
represents the state distribution of the system based
on a Gaussian random variable and a deterministic
sample approach. Unscented transform eliminates
calculation of Jacobians in UKF by which the
complexity of computation is reduced substantially.
The system can be expressed as an augmented form
of estimated state and system covariance as follows:
x
1−k
(augmented) = [(
+
−1
ˆ
k
x )
T
E[ w
k
T
]]
T
(6)
P
−
−1k
(augmented) =
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
+
−
k
k
Q
P
0
0
1
(7)
For more detail see (Julier, Uhlmann, 2004)
4 SIMULATIONS AND RESULTS
In this experiment, the range sensor was able to
detect approximately 6 point landmarks per meter,
meaning that the shortest distance between two
nearby landmarks is approximately 0.20 meter same
as (Monjazeb, Sasiadek, and Necsulescu, 2008). In
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
486
all simulation experiments, the sampling time is
considered as T=0.2s. Velocity of the robot is set at
3.0 m/s and in agreement with a real
instrumentation. The maximum range for the
range/bearing is set as 50m. In a simulated scenario
the robot is travelling on a road that is curved and
depicts a loop closing situation. Position of
detectable landmarks simulates a cluttered
environment. The systematic error of the motion
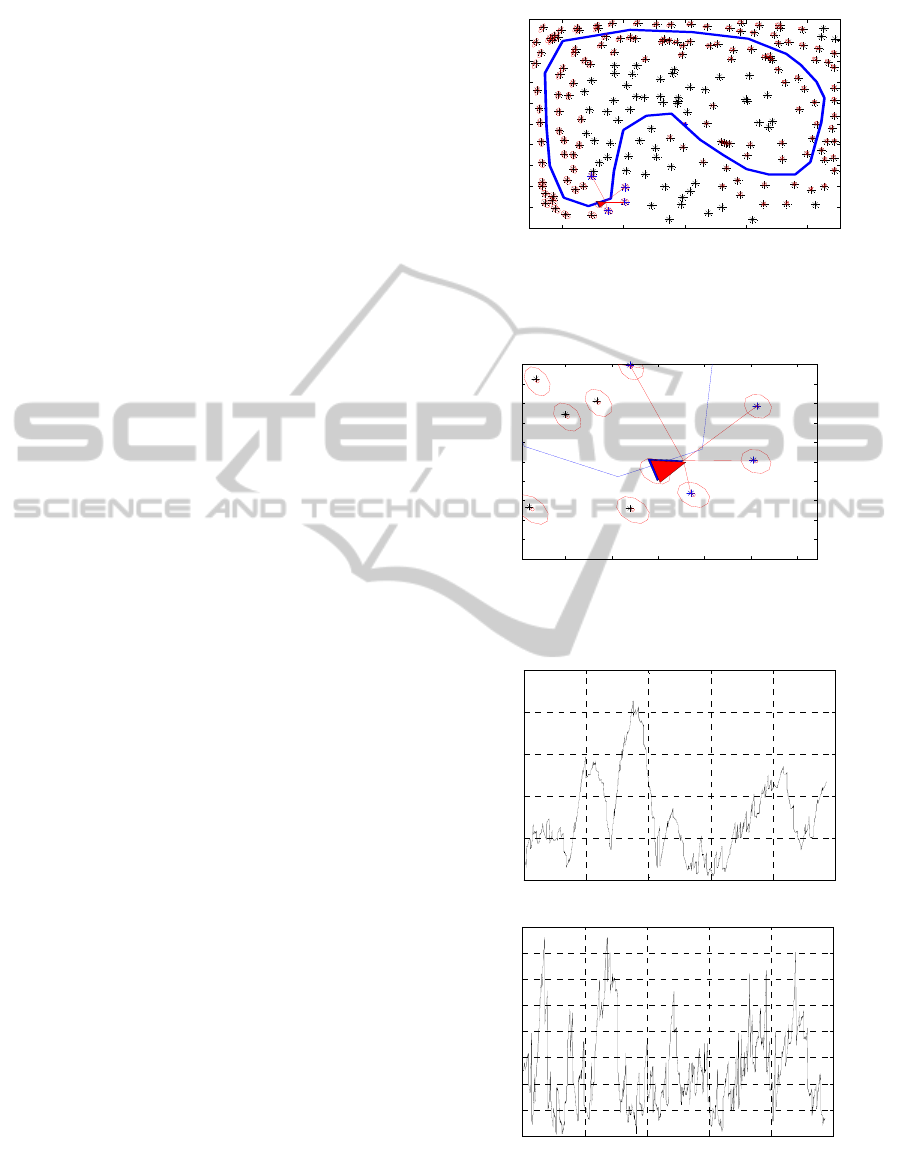
This figure illustrates a loop closing scenario with
given waypoints and detectable landmarks that
represent a two dimensional (250,000m
2
) cluttered
environment. 200 detectable landmarks are
randomly distributed and a set of waypoints is
defined through a passageway. With the assumption
of unknown data association for a HybridSLAM
algorithm, 30 particles are incorporated in the
calculation of local map and fused to the global map
using both EKF-SLAM and UKF-SLAM. Figures 2
and 3 depict a situation that the loop is closed and
the Root Mean Square (RMS) position error is
calculated. Figure 2 shows how the vehicle observes
landmarks with uncertainty involved in the
algorithm. In Figure 3-a, the accuracy of
HybridSLAM is shown using EKF-SLAM as a
back-end. The RMS position error average is around
0.6m. Figure 3-b depicts the RMS position error in
the same situation using UKF-SLAM except for, this
time, the accuracy of HybridSLAM is substantially
improved. The RMS position error using UKF is
0.3m which is 30cm less than the situation in which
the algorithm uses EKF-SLAM as a global map
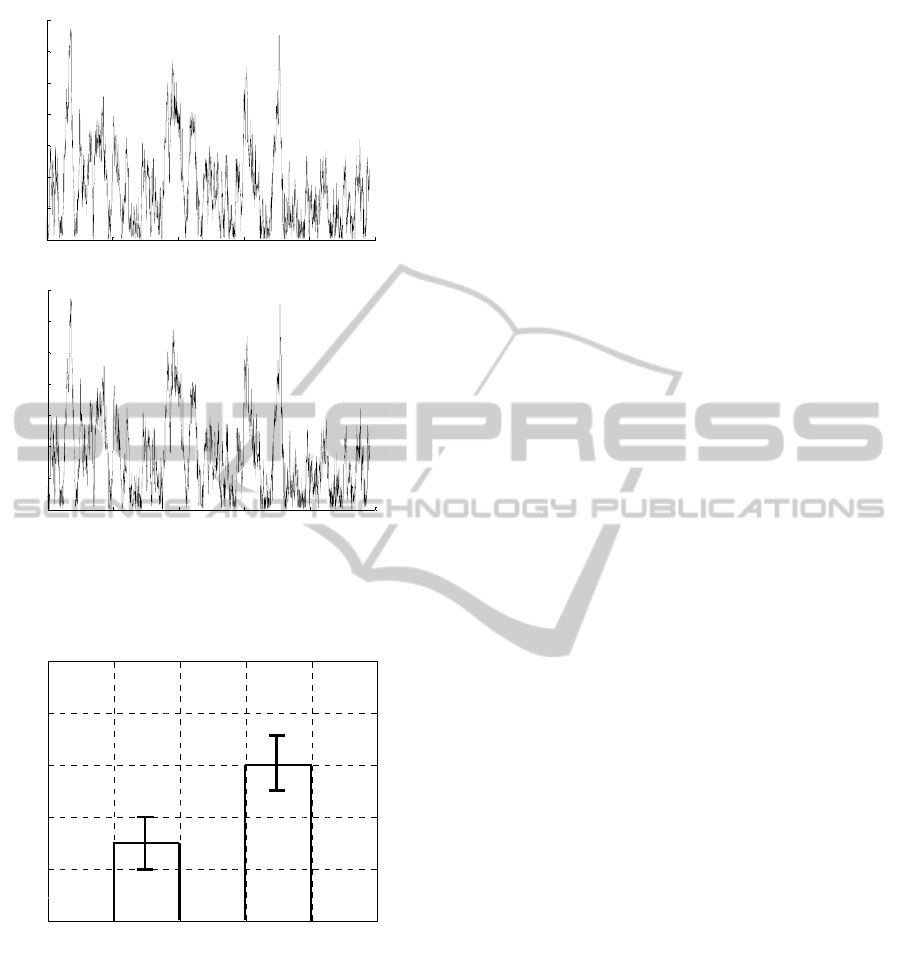
fusing strategy. Figures 4 shows the orientation
error for both versions of KF an for the same
scenario; the use of EKF-SLAM and UKF-SLAM as
the back-end to fuse the local map to the global map.
Results indicate that in terms of the orientation error,
UKF is outperforming EKF. The average of
orientation error as a result of using UKF-SLAM is
around 0.03rad and the difference with that of EKF-
SLAM is 0.01rad. The simulation of the same
scenario was run for 20 iterations. Figure 5
demonstrates a comparison between HybridSLAM
with a use of EKF-SLAM and HybridSLAM with a
use of UKF-SLAM. The accuracy of both
algorithms is computed in terms of the RMS
position error average.
It should be noted that the performance of
HybridSLAM in the presence of either Kalman filter
will depend on motion parameters as well as the
measurement model. Results indicate that UKF-
SLAM performance is better than EKF-SLAM
infusing the local map into the global map.
-200 -100 0 100 200
-250
-200
-150
-100
-50
0
50
100
150
200
250
X Direction (m)
(a) Before Closing the Loop
Y Direction (m)
Figure 1: An autonomous mobile robot travelling in a
cluttered environment. (a) before the loop is closed (b)
after the loop is closed.
Figure 2: Uncertainty that arises in the heart of SLAM
problem.
0 500 1000 1500 2000 2500
0
0.5
1
1.5
2
2.5
(a) EKF RMS Position Error
Time (s)
RMS Positon Error (m)
0 500 1000 1500 2000 2500
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
(b) UKF RMS Position Error
Time (s)
RMS Positon Error (m)
Figure 3: (a) RMS position error for EKF-SLAM as the
back-end in HybridSLAM (b) RMS position error for
UKF-SLAM as the back-end in HybridSLAM.
X Direction (m)
Y Direction (m)
AutonomousNavigationofanOutdoorMobileRobotinaClutteredEnvironment
487
0 500 1000 1500 2000 2500
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Time (s)
Error (rads)
EKF Orientation Error
0 500 1000 1500 2000 2500
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
Time (s)
Error (rads)
(b) UKF Orientation Error
Figure 4: (a) Orientation error for EKF-SLAM as the
back-end in HybridSLAM (b) Orientation error for UKF-
SLAM as the back-end in HybridSLAM.
0
0.2
0.4
0.6
0.8
1.00
UKF vs. EKF
HybridSLAM
Using UKF-SLAM
Average RMS Positon Error (m)
HybridSLAM
Using EKF-SLAM
Figure 5: A comparison between EKF-SLAM and UKF-
SLAM in a HybridSLAM algorithm.
5 CONCLUSIONS
In this paper, the performance of HybridSLAM
strategy is examined using two different versions of
Kalman filter as the back-end algorithm to fuse local
map into a global map. Results show that with a use
of UKF-SLAM, Root Mean Square (RMS) position
and orientation errors decrease substantially in
comparison with EKF-SLAM. Applying Unscented
Kalman Filter (UKF) allows the state distribution to
be propagated analytically through the third order
linearization of a non-linear system. The
performance of proposed method is compared with a
standard HybridSLAM and accuracy of the process
is examined through 20 iterations. In addition,
simulations and results show that for a non-linear
motion, the use of UKF-SLAM would drastically
increase accuracy of the estimation for a long
trajectory specified in a loop closing case.
REFERENCES
Monjazeb, A., Sasiadek, J. Z., Necsulescu, D.,
Autonomous navigation among large number of
nearby 2011, landmarks using FastSLAM and EKF-
SLAM; a comparative study, Proc. of 16
th
International Conference on Methods and Models in
Automation and Robotics, pp. 369-374, Miedzyzdroje,
Poland.
Brooks, A., Bailey, T., 2009, HybridSLAM: Combining
FastSLAM and EKF-SLAM for reliable mapping,
Springer Tracts in Advanced Robotics, Volume 57, pp.
647-661.
Sasiadek, J. Z., Monjazeb, A., Necsulescu, D., 2008,
Navigation of an autonomous mobile robot using
EKF-SLAM and FastSLAM, Proc. of 16
th
Mediterranean Conference on Control and
Automation, pp. 517-522, Ajaccio, France.
Durrant-Whyte H., Bailey T., 2006, Simultaneous
localization and mapping (SLAM): Part I the essential
algorithms, IEEE Robatics and Automation Magazine,
Vol. 13, No. 2, pp. 99-108, June.
Thrun, S., Montemerlo, M., Koller, D., Wegbreit, B.,
Nieto, J., Nebot, E., 2004, FastSLAM: an efficient
solution to the simultaneous localization and mapping
problem with unknown data association, Journal of
Machine Learning Research.
Julier, S. J., Uhlmann, J. K., 2004, Unscented filtering and
nonlinear estimation, Proceedings of IEEE Journal,
Vol. 92, Issue 3, pp. 401-422, March.
Vander Merwe, R., Wan, E., Julier, S., 2004, Sigma-point
Kalman Filters for nonlinear estimation and sensor-
fusion: Applications to integrated navigation”,
Proceedings of the AIAA Guidance, Navigation and
Control Conference, Providence, Rhode Island,
August.
Williams, S. B., Dissanayake, G., Durrant-Whyte, H.,
2002, An Efficient Approach to the Simultaneous
Localisation and Mapping Problem”, Proceedings of
the 2002 IEEE International Conference on Robotics
& Automation, Washington DC.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
488
