
Observations of Discrete Event Models
Gauthier Quesnel
1
, Ronan Tr
´
epos
1
and
´
Eric Ramat
2
1
INRA, UR875 Biom
´
etrie et Intelligence Artificielle, F-31326 Castanet-Tolosan, France
2
ULCO, LISIC, 50 Rue Ferdinand Buisson BP 719, 62228 Calais Cedex, France
Keywords:
Simulation, Discrete Event Systems, DEVS Formalism, Observation, Methodology.
Abstract:
The observation of a simulation is an important task of the modeling and simulation activity. However, this
task is rarely explained in the underlying formalism or simulator. Observation consists to capture the state
of the model during the simulation. Observation helps understand the behavior of the studied model and
allows improving, analyzing or debugging it. In this paper, we focus on appending an observation mechanism
in the Parallel Discrete Event System Specification (PDEVS) formalism with guarantee of the reproducible
simulation with or without observation mechanism. This extension to PDEVS allows us to observe models at
the end of the simulation or according to a time step. Thus, we define a formal specification of this extension
and its abstract simulators algorithms. Finally, we present an implementation in the DEVS framework VLE.
1 INTRODUCTION
In the Modeling and Simulation (M&S) activity, ob-
servation of the behavior of models is an important
aspect. An observation captures the state or the evo-
lution of the state during or at the end of the simula-
tion. It allows the modeler to test, prove, validate, or
generate data from simulations by connecting simula-
tion software application to output streams like files,
databases, unit test or visualization software. Obser-
vations contribute to the modelers representation of
its studied system.
In environmental and agronomic modeling do-
main, we need to couple heterogeneous models.
These models can be continuous or discrete. In addi-
tion, these models co-exist in different temporal and
spatial scales. Thus, to solve this problem, we use
the Discrete Event Specification System (DEVS) for-
malism (Zeigler et al., 2000). DEVS can be seen
as a common denominator for multi-formalism hy-
brid systems modeling (Vangheluwe, 2000). DEVS
takes place in the M&S theory defined by B. P. Zei-
gler. M&S theory tends to be as general as possible.
It addresses major issues of computer sciences from
artificial intelligence to model design and distributed
simulations. M&S theory aims to develop a common
framework, formal and operational, for the specifica-
tion of dynamical systems.
Modeling the observation process is dependent on
the underlying formalism. However, for many forma-
lisms, the observation does not exist and the outputs
of models are used directly. For example, the numeri-
cal integration method Euler used for solving ordinary
differential equations does not allow catching variable
between two time-steps. The observation process is
generally not explicit nor specified in the formalism.
Specify the observation process is generally not use-
ful. However, it becomes necessary when we want
to observe multi-models with the same observation
mechanism.
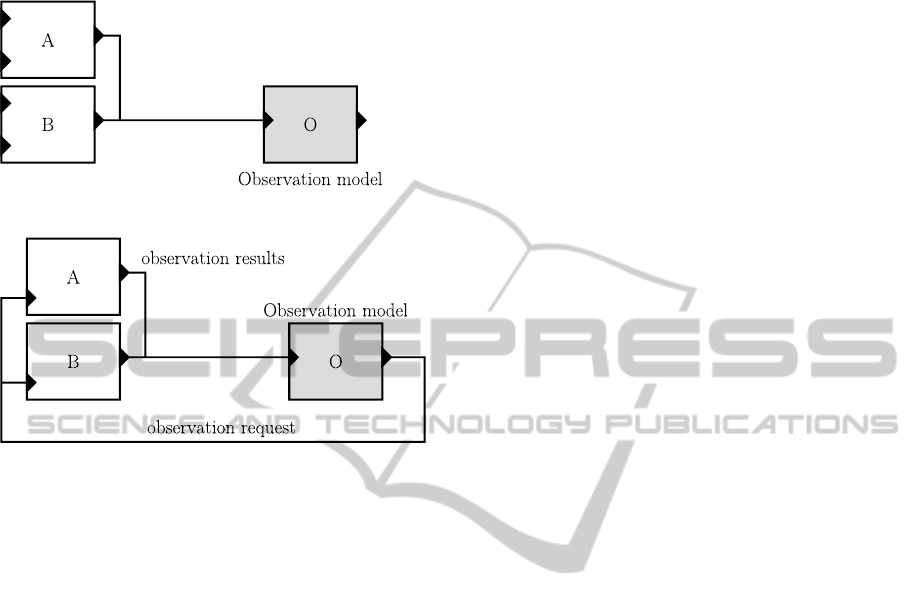
However, the DEVS formalism does not propose
observation of simulation models. Several solutions
exist without changing the behavior of DEVS. For
example, in the first picture of the figure 1, outputs
of the models A and B are connected to an obser-
vation model O. O has a reactive behavior. Pow-
erDEVS (Bergero and Kofman, 2010) chooses this
solution. It is simple and has great flexibility. How-
ever, it can be very expensive. Indeed, in the case
of experimental frames (to calibrate or estimate pa-
rameters or to optimize parameters on criteria), only
the final values of the observations are necessary. All
the values received are useless. The interpretation of
these values can be costly. In the second picture of
the figure 1, an observation model O generates events
to observed models A and B. These models send
their outputs to the observation model. This solution
is computationally less expensive, but requires mix-
ing observation and normal behavior of the model.
This mechanism can induce a difficulty in reproduc-
32
Quesnel G., Trépos R. and Ramat É..
Observations of Discrete Event Models.
DOI: 10.5220/0004054300320041
In Proceedings of the 2nd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2012),
pages 32-41
ISBN: 978-989-8565-20-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
ing simulations and can increase the complexity of
model.
Figure 1: Classical reactive and proactive observation
mechanism in DEVS.
We chose in this work to modify the DEVS for-
malism by adding an extension. This addition does
not change the behavior of DEVS. It adds a layer of
observation to DEVS. The DEVS trajectories of the
simulations are the same with or without this exten-
sion. However, some alternative exist to add an ob-
servation mechanism. Thus, rather than developing
the observation process in the formalism, researchers
developed this process in the software part of their
simulators. It is the choice made by JAMES 2 (Him-
melspach and Uhrmacher, 2009) and OSA (Ribault
et al., 2010). JAMES 2 uses the design pattern ob-
servation; OSA uses AOP (Aspect-oriented program-
ming. The design pattern observation links for each
model a list of observation component. This list has
a function called notify. The model calls this func-
tion when it wants to send observation value. The
observation component has a reactive behavior. This
type of behavior can increase the calculation to per-
form the treatment of observation values from multi-
models (e.g. Models that use formalism with different
time advance function). Of course, through a combi-
nation of the visitor and observer design patterns, we
can make active the behavior of the observation com-
ponent.
In this paper, we propose to extend the PDEVS
formalism with an observation mechanism. This ex-
tension to DEVS provides a generic way to observe
heterogeneous models and it guarantees the same sim-
ulations when this mechanism is activated and when
it is not.
This paper is divided into three parts. In the first
part, we explain the PDEVS formalism. This formal-
ism is the context of our work. Then, we develop our
contribution in two parts. (1) We develop the for-
mal specification of the observation extension. This
specification guarantees to conserve the behavior of
PDEVS. (2) We present the abstract simulators of the
observation extension. Developers of PDEVS simula-
tors software can use these abstract simulators to in-
troduce the extension observation in their simulators.
The last sections show an implementation of this ex-
tension in the software VLE and an example of use.
Finally, we conclude this paper with conclusion and
perspectives.
2 METHOD
DEVS (Zeigler et al., 2000) is a well-known and ac-
cepted formalism for the specification of complex dis-
crete or continuous systems abstracted as a network of
concurrent, timed and interacting models. DEVS pro-
vides a hierarchical and modular approach to model-
ing and simulation. The formalism supports two types
of models: atomic and coupled models. Atomic mod-
els interact thought a well-defined set of input and
output values enabling a software component based
orientation to model representation. Atomic models
can be combined to form coupled models, providing
the constructs to the representation of complex mod-
els.
2.1 PDEVS Formalism
PDEVS (Chow and Zeigler, 1994) extends the Clas-
sic DEVS essentially by allowing bags of inputs to
the external transition function. Bags can collect in-
puts that are built at the same date, and process their
effects in future bags. This formalism offers a solu-
tion to manage simultaneous events that could not be
easily managed with Classic DEVS. For a detailed de-
scription, we encourage the reader to read the section
3.4.2 in chapter 3 and the section 11.4 in chapter 11
of Zeigler’s book (Zeigler et al., 2000).
PDEVS defines an atomic model as a set of input
and output ports and a set of state transition functions:
M =
h
X,Y,S, δ
int
,δ
ext
,δ
con
,λ, ta
i
With:
ObservationsofDiscreteEventModels
33
X is the set of input values
Y is the set of output values
S is the set of sequential states
ta : S → R
+
0
is the time advance function
δ
int
: S → S is the internal transition function
δ
ext
: Q × X
b
→ S is the external transition
function
Q = {(s, e)|s ∈ S,0 ≤ e ≤ ta(s)}
Q is the set of total states,
e is the time elapsed since last transition
X
b
is a set of bags over elements in X
δ
con
: S × X
b
→ S is the confluent transition
function, subject to δ
con
(s,
/
0) = δ
int
(s)
λ : S → Y is the output function
If no external event occurs, the system will stay
in state s for ta(s) time. When e = ta(s), the system
changes to the state δ
int
. If an external event, of value
x, occurs when the system is in the state (s,e), the
system changes its state by calling δ
ext
(s,e,x). If it
occurs when e = ta(s), the system changes its state
by calling δ
con
(s,x). The default confluent function
δ
con
definition is:
δ
con
(s,x) = δ
ext
(δ
int
(s),0,x)
The modeler can prefer the opposite order:
δ
con
(s,x) = δ
int
(δ
ext
(s,ta(s),x))
Indeed, the modeler can define its own function.
Every atomic model can be coupled with one or
several other atomic models to build a coupled model.
This operation can be repeated to form a hierarchy of
coupled models. A coupled model is defined by:
N = hX,Y,D, {M
d
},{I
d
},{Z
i,d
}i
Where X and Y are input and output ports, D the
set of models and:
∀d ∈ D, M
d
is a PDEVS model
∀d ∈ D ∪ {N}, I
d
is the influencer set of d :
I
d
⊆ D ∪ {N},d /∈ I
d
∀d ∈ D ∪ {N},
∀i ∈ I
d
,Z
i,d
is a function,
the i-to-d output translation:
Z
i,d
: X → X
d
, if i = N
Z
i,d
: Y
i
→ Y, if d = N
Z
i,d
: Y
i
→ X
d
, if i 6= N and d 6= N
The influencer set of d is the set of models that
interact with d and Z
i,d
specifies the types of relations
between models i and d.
2.2 Extension Observation: Formal
Specification
The development of simulation software based on
DEVS formalism implies to observe models and
their evolution during the simulation. Observation of
DEVS models involves watching or capturing their
states. These captures can be done when a change
of state occurs (in DEVS terminology, in δ
int
, δ
ext
or
δ
con
transition functions) or at specific dates.
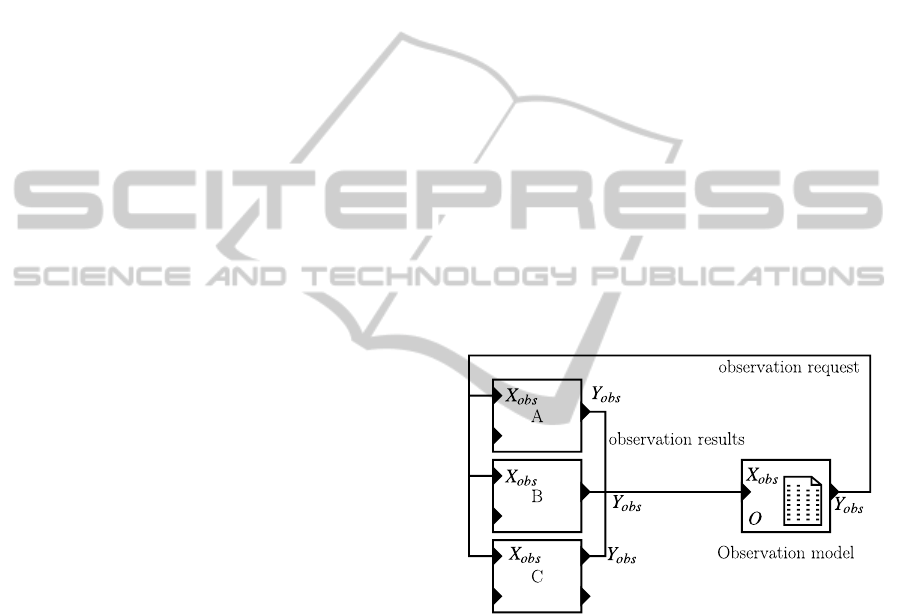
In DEVS, the solution generally used is to connect
models, both inputs and outputs, to an observation
model (see figure 2). This model has in charge to send
observation messages and to process the responses of
the models. For example, to build a discrete obser-
vation, the observation model relies on a constant ta
function in order to send, at each time step, an event
to observed models. Observed models compute ob-
servations values and send them to the observer.
Figure 2: This picture shows the classic observation mech-
anism to observe models in the DEVS formalism. Three
atomic models A, B and C are observed by an observation
model O which sends event for request observation on out-
put Y
obs
and waits the results on input port X
obs
in order to
store it in output files or databases.
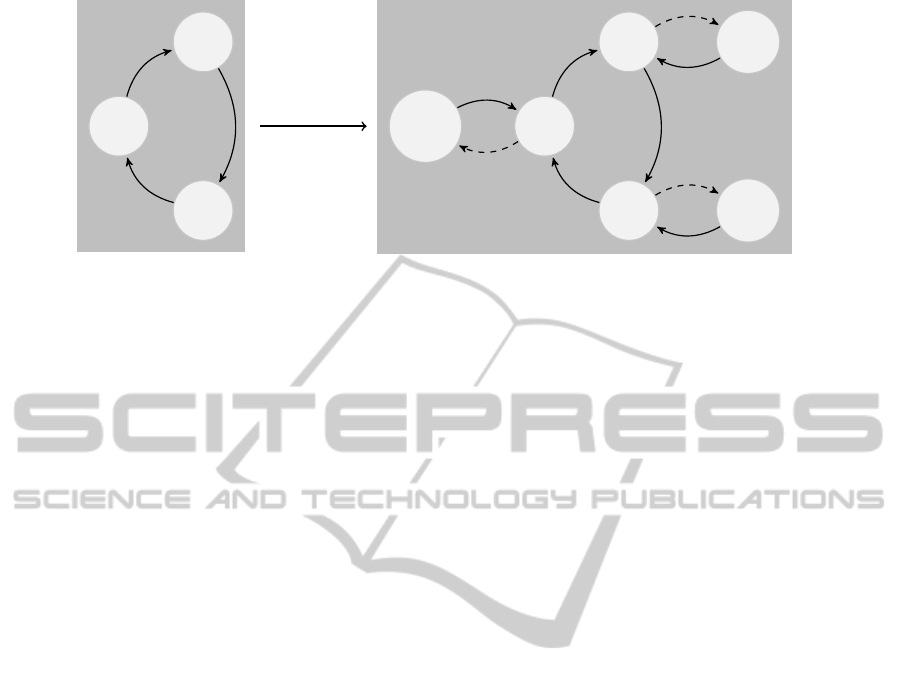
This solution forces the modelers to merge the
state graphs between observation and behavior of
their models (See figure 3 for an explanation).
In addition, by merging the state graphs, the mod-
eler might make the results of its models dependent to
his observation. If model is observed asynchronously
with its behavior, the computation of the elapsed time
e when an external event disturbs an atomic model
may introduce a floating-point error. Indeed, coordi-
nator needs to call the external transition of the simu-
lator with s,e,x parameters where e = t −tl with t the
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
34
init
A
B
init
A
B
Obs
init
Obs
A
Obs
B
Adding of
the capacity
to observe
the model
Figure 3: This picture show state graphs of an atomic model. In left picture, we show the model without observation and in
the right part, the same model with the capacity to be observed at any time (dotted lines represent external transitions). In
the computation of the observation states Obs
init
, Obs
A
or Obs
B
(in δ
ext
, δ
int
, δ
conf
or ta functions), simulators can introduce
floating-point errors when computing the time elapsed since last transition (e in DEVS terminology) for example.
current time of the simulation (time of the perturba-
tion) and tl the time of last event. If an internal state
variable in S is based on e to compute its value in the
δ
ext
transition, its internal state variables can give dif-
ferent results with or without observations. Precisely,
this mismatch can be explained by the difficulty rep-
resenting real number in computer engineering (Gold-
berg, 1991) (see the IEEE Standard for Floating-Point
Arithmetic, IEEE 754).
If all models use integer as representation of the
time (i.e. all time advance functions return duration in
N), the floating-point problem would not exist. How-
ever, in the domain of Environmental Modeling, the
models use continuous and discrete event formalisms
such as the QSS2 formalism (Kofman, 2002) which
solves in R a second order polynomial function in
order to compute the duration in a state. They can
hardly rely on a representation of the time in N.
The solution proposed does not change the value
of e in the case of observation.
Finally, in DEVS, a model can have several states
at the same date (when at least one call to the ta(s)
function returns 0). These states are called transitory
states. It seems obvious that the observation of the
transitory states makes no sense. However, this solu-
tion does not guarantee to provide only observations
of real model states. For example, if the observation
is required at a specific time of simulation, the state
observed can be one of these transitory states.
In this section, we propose a formal and opera-
tional representation of observations in the PDEVS
formalism. This extension is based on a function of
observation in atomic models and a second graph of
connections in coupled models. This extension to the
PDEVS formalism integrates necessary characteris-
tics:
• First is to ensure that this extension does not dis-
turb the simulation i.e. we need to conserve the
same result with or without the observation.
• Second is to provide several types of observation.
We propose, in this paper, two modes: time step
and finish that define respectively: observations
when a model reaches a time and observations at
the end of the simulation (see figure 4).
• Third, the extension should not take its values di-
rectly from the state of the current model but from
a function (see figure 4).
• Finally, in DEVS, state variables may change sev-
eral times at the same date (when its ta returns 0
or when an external event disturb it). In this case,
we observe the last state of the model.
Thus, to develop this extension we need to add
function to the atomic models, to add new set in cou-
pled model and add specific observation models. We
develop these changes in the next section.
2.2.1 PDEVS Atomic Model
To develop this extension in the PDEVS formalism,
we extend the PDEVS atomic model with new sets of
input and output ports (X
obs?
and Y
obs
). The first one
is used for observation request; the second one is used
for routing values returned by modeler. We attach to
this port a new output function called λ
obs
. The new
PDEVS atomic model is defined such as:
M = hX,Y,S,X
obs?
,Y
obs
,δ
int
,δ
ext
,δ
con
,λ, λ
obs
,tai
Where:
X
obs?
are the ports used to catch
observation requests.
Y
obs
are the ports used to send observation values.
ObservationsofDiscreteEventModels
35

t
S
State of a system
t
S
DEVS transitory state
t
S
Finish observation
t
S
Timed observation
Figure 4: The first figure shows the evolution of the state S
of a system over time t. The second figure shows the model
of this system in DEVS. This figure shows the trajectory of
the state of the DEVS model. The last two figures show the
extension observation described in this paper in time-step
(∆
t
= 1) or in finish mode. This extension allows the mod-
eler to provide a function (observation) that computes an
observation value. Dots are observation values. These val-
ues are computed by interpolation of the current DEVS state
of s and e, the elapsed time since the last transition.
λ
obs
: X
obs?
× s ×t
obs
→ Y
obs
s ∈ S,
t
obs
current time of the simulation.
This definition allows us to represent both
observed models and classical PDEVS models
as defined in section 2.1. Indeed, the model
hX,Y,S, X
obs?
,Y
obs
,δ
int
,δ
ext
,δ
con
,λ, λ
obs
,tai with no
observations
1
is equivalent to the classical PDEVS
atomic model hX,Y, S,δ
int
,δ
ext
,δ
con
,λ, tai. In fact,
we should distinguish observed models from observer
models.
2.2.2 Observer Models
In this paper, we suggest two types of observers.
O
timed
, and O
finish
to respectively, send observation
following a given time-step or at the end of the simu-
lation.
1
X
obs?
=
/
0, Y
obs
=
/
0 and λ
obs
is a null function.
• The discrete time observer model, O
timed
, needs
to send output events on its output port Y
obs
every
∆
t
unit time. O
timed
reads observation events from
its port X
obs
and stores data transported by event.
This model is :
O
timed
= hX
obs
,Y
obs?
,S, X
obs?
,Y
obs
,
δ
int
,δ
ext
,δ
con
,λ, λ
obs
,tai
Where:
X
obs
is the set of observation values,
Y
obs?
is the set of observation requests,
S : {IDLE,SENT} × Data, with:
IDLE, SENT: automata finite states,
Data: output stream states.
X
obs?
=
/
0
Y
obs
=
/
0
∀d ∈ Data : δ
int
((IDLE, d)) = (SENT,d)
∀d ∈ Data : δ
int
((SENT, d)) = (IDLE,d)
∀s ∈ {IDLE,SENT } :
δ
ext
((s,d),e,X
obs
) = (s, d
0
)
where d
0
is the state of the output stream
once X
obs
has been stored,
∀d ∈ Data : ta((IDLE, d)) = ∆
t
(the time step)
∀d ∈ Data : ta((SENT, d)) = 0
∀s ∈ S : λ(s) = observation(s,t,x)
λ
obs
is a null function
• The finish observer model, O
finish
, produces ob-
servation events at the end of the simulation on it
Y
obs
port and wait observation events from its port
X
obs
. O
finish
is the same model as O
timed
but, its ta
function returns the end of the simulation to build
observation event, or +∞ after.
O
timed
= hX
obs
,Y
obs?
,S, X
obs?
,Y
obs
,
δ
int
,δ
ext
,δ
con
,λ, λ
obs
,tai
Where:
X
obs
is the set of observation values,
Y
obs?
is the set of observation requests,
S : {WAIT,END} × Data, with:
WAIT, END: automata finite states,
Data: output stream states.
∀d ∈ Data : δ
int
((WAIT, d)) = (END, d)
∀d ∈ Data : δ
int
((END,d)) = (END,d)
∀s ∈ {WAIT,END} :
δ
ext
((s,d),e,X
obs
) = (s, d
0
)
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
36
where d
0
is the state of the output stream
once X
obs
has been stored,
X
obs?
=
/
0
Y
obs
=
/
0
∀d ∈ Data : ta((WAIT,d)) = end
where end is the duration of simulation
∀d ∈ Data : ta((END,d)) = +∞
∀s ∈ S : λ(s) = observation(s,t,x)
λ
obs
is a null function
The function observation is a user defined func-
tion that identifies in Y
obs?
the observation request that
should be sent to the observed models.
2.2.3 Coupled Model
As seen earlier in the introduction and in the section
2.1, the I
d
variable and the function Z
i,d
define the
graph of connections of the models by calculating the
influenced models. Our observation extension of the
PDEVS formalism uses the same principle. It pro-
poses two subsets I
o
and I
r
that, respectively iden-
tify the influences of atomic models (responses of the
observations) and the influences of observer models
(models sending the request of observation).
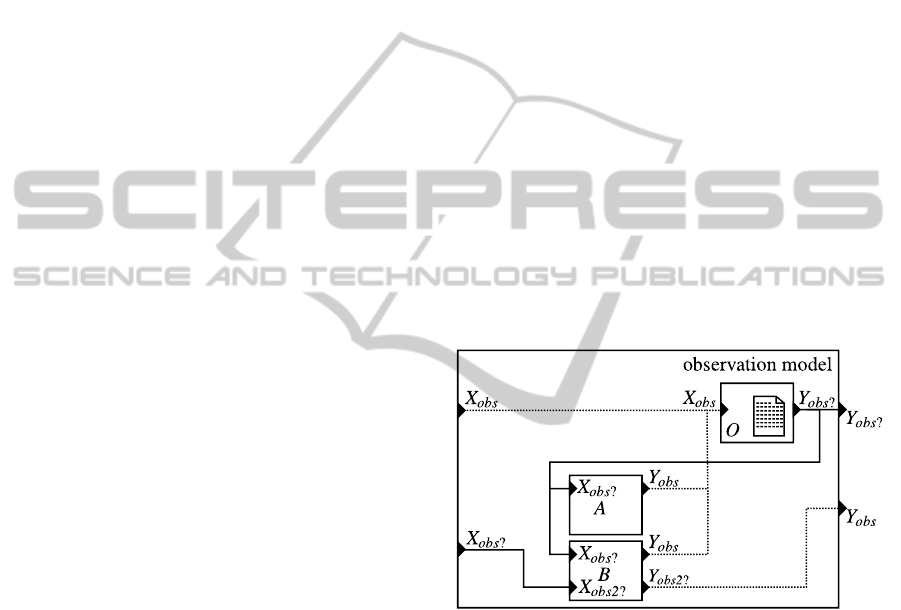
We extend the PDEVS model coupled in order to
introduce a second connection network (see the figure
5). This second network is dedicated to the observer
models and to the classical PDEVS atomic models to
observe through their ports X
obs?
and Y
obs
. The new
PDEVS coupled model is defined as:
N = hX,Y,D, O,R,X
obs?
,X
obs
,Y
obs?
,Y
obs
,
{M
d
},{I
d
},{Z
i,d
},
{M
o
},{O
d
},{Z
o,d
},{M
r
},{R
d
},{Z
r,d
}i
Where X
obs
, Y
obs
and X
obs?
, Y
obs?
are input and out-
put ports to route observation and request events. O
is the set of names of observed models O ⊆ D, {M
o
}
is the set of observed models {M
o
} ⊆ {M
d
} , R is the
set of names of observer models R ⊆ D and {M
r
} is
the set of observer models {M
r
} ⊆ {M
d
}.
∀r ∈ R ∪ {N},
I
r
is the influencer set of observed models of r
I
r
⊆ O ∪ {N},r /∈ I
r
∀o ∈ O ∪ {N},
I
o
is the influencer set of observed models of o
I
o
⊆ R ∪ {N},o /∈ I
o
The observation network is however very con-
strained. Thus, the functions Z
o,d
and Z
r,d
are very
different and provide additional constraints from the
classical Z
i,d
function. These additional constraints
ensure that a DEVS atomic model cannot send an ob-
servation event to another DEVS atomic model, and
an observation model cannot send request observa-
tion to another observation model. The figure 5 shows
an example of connections between observed and ob-
server models.
∀r ∈ R ∪ {N},
∀d ∈ I
r
,∃ an output translation function Z
r,d
:
Z
r,d
: X
obs?
→ X
obs?
d
, if r = N
Z
r,d
: Y
obs?
r
→ Y
obs?
, if d = N
Z
r,d
: Y
obs?
r
→ X
obs?
d
, if r 6= N and d 6= N
∀o ∈ O ∪ {N},
∀d ∈ I
o
,∃ an output translation function Z
o,d
:
Z
o,d
: X
obs
→ X
obs
d
, if o = N
Z
o,d
: Y
obs
o
→ Y
obs
, if d = N
Z
o,d
: Y
obs
o
→ X
obs
d
, if o 6= N and d 6= N
Figure 5: In this picture, we illustrate the second network
in the coupled model to deal with observations graph. Plain
connections are observation requests from output port Y
obs?
of observation models, to atomic model input port X
obs?
or
to coupled model’s output port Y
obs?
, or from coupled model
input port X
obs?
to atomic model X
obs?
. Dashed connections
constitute response of observation request from extended
PDEVS atomic model (on output port Y
obs
) to observation
model X
obs
or coupled model output port Y
obs
. The atomic
model B is observed by an external observation model on
its port X
obs2
. It sends observations to its output port Y
obs2
.
For this figure and for a better understanding, we distinguish
observation ports for the model B.
2.2.4 Closure Under Coupling
Since we keep unchanged the internal S of coupled
or atomic models nor all sets of the PDEVS defini-
tion (IMM, INF(s), CONF(s), EXT(s) and UN(s) of
ObservationsofDiscreteEventModels
37

Listing 1: Root coordinator algorithms.
Parallel−Devs−Root−Coordinator
variables:
t // current simulation time
child // direct subordinate devs−simulator
// or devs−coordinator
t = t
0
send initialization message (i,t) to child
t = tn of its child
loop
send (∗,t) message to child
t = tn of its child
until end of simulation
end Parallel−Devs−Root−Coordinator
the coupled model), the PDEVS functions have the
same content (See chapter 7 in (Zeigler et al., 2000) to
the complete formalization). The closure under cou-
pling property of the extension observation for paral-
lel DEVS is still verified.
2.3 Algorithms
2.3.1 Root Coordinator
The root-coordinator implements the overall simula-
tion loop. It sends messages to its direct subordi-
nate (simulator or coordinator). The root-coordinator
first sends an initialize message (i-message), and loop
on internal transition (*-message) from its child to
perform the simulation cycles until some termination
conditions.
As describe in the listing 1, the root coordinator is
unchanged in this extension.
2.3.2 Coordinator
In the coordinator algorithm, we add an additional
variable tb, which indicates the last date of the sim-
ulation. This variable tb detects the last PDEVS bags
to ensure to observe the latest state of a model. We
add a new bag, called mailobs to store all observation
events to atomic models at a specific date. When tb
detect a change, the mailobs is flushed into the obser-
vation network using the functions Z
r,d
and Z
o,d
.
The coordinator’s algorithms are described in the
listings 2. From l. 1 to l. 38: routes the message or
stores in mailobs. From l. 40 to the end: to update the
tb variable and to send xobs?-message to the atomic
models.
Listing 2: Coordinator algorithms.
1 Parallel−Devs−Coordinator
2 variables:
3 DEVN = (X, Y , D, {M
d
}, {I
d
}, {Z
i,d
})
4 parent // parent coordinator
5 tl // time of last event
6 tn // time of next event
7 eventlist // list of element (d, tn
d
) sorted by tn
d
8 mail // output mail bag
9 mailobs // observation mail bag
10 O
event
// event−list of event observation model
11 y
parent
// output message bag to parent
12 y
d
// set of output message bags for each child d
13
14 when receive xobs−message (x
obs
,t)
15 if not (tl ≤ t ≤ tn) then
16 error: bad synchronisation
17 receivers = {o|o ∈ children,o ∈ I
r
}
18 for each o ∈ receivers
19 send x−message (Z
r,d
(x) with input value Z
r,d
to o
20
21 when receive xobs?−message (x
obs?
,t)
22 if not (tl ≤ t ≤ tn) then
23 error: bad synchronisation
24 receivers = {r|r ∈ children,r ∈ I
o
}
25 for each r ∈ receivers
26 add r, x
obs?
to mailobs
27
28 when receive yobs−message (y
obs
,t) from o
29 for each child d ∈ Z
o,d
30 send xobs−message to d
31 for each d ∈ Z
o,d
and d = N
32 send yobs−message to parent
33
34 when receive yobs?−message (y
obs?
,t) from r
35 for each child d ∈ Z
r,d
36 send yobs−message to d
37 for each d ∈ Z
r,d
and d = N
38 send yobs?−message to parent
39
40 // finally, we append these algorithms
41 // in the following message
42
43 when receive i−message (i,t) at time t
44 [...] // The same algorithms than PDEVS
45 tb = tl
46
47 when receive ∗−message, x−message or y−mess
48 age
49 if tb != t then
50 for each r, x
obs?
∈ mailobs
51 send xobs?−message (Z
r,tb
(x) with
52 input value Z
r,d
to r
53 mailobs =
/
0
54 tb = t
55 [...] // The same algorithms than PDEVS
56
57 end Parallel−Devs−Coordinator
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
38

Listing 3: Simulator algorithms.
1Parallel−Devs−Simulator
2variables:
3parent // parent coordinator
4tl // time of last event
5tn // time of next event
6DEV S // associated model with total state (s,e)
7y
obs
// output observation bag
8
9// The same algorithms than PDEVS simulator
10// see chapter 11
11[...]
12
13when receive xobs?−message (x
obs?
,t) at t
14with input x
obs?
15y
obs
= λ
obs
(x
obs?
,t)
16send yobs−message (y
obs
,t) to parent coordinator
17
18end Parallel−Devs−Simulator
2.3.3 Simulator
Lastly, this last section on the abstract simulators
develops algorithm for the simulator of the atomic
model. As presented previously, the management of
the observations events is very simple for the modeler
since only one function is called λ
obs
. This function
is called only for classical atomic models when they
receive an X
obs?
event. When observation models re-
ceives X
obs
event, they use the classical way when re-
ceiving input message (See x-message in PDEVS ab-
stract simulators).
The listing 3 describes the simulators algorithms.
In line 12: when receives an xobs?-message from the
parent, simulator computes the observation in the λ
obs
function and sends the data (wrapped into an yobs-
message) to the parent coordinator.
To validate this work, we made an implementation
of this extension in the DEVS open source simulator
VLE.
3 RESULT
These works have started with multi-disciplinary is-
sues emerging from the interaction between computer
scientists and biologists. Considering these works,
we think that the integration of heterogeneous models
and the respect of the M&S cycle are the key issues to
provide a complete and reliable software environment
for natural complex systems modeling. Therefore,
VLE has evolved on a complete multi-modeling and
simulation environment (Quesnel et al., 2009) and is
now a generic environment for M&S, in Environmen-
tal Sciences, in Industry or Medicine. Many projects
from two major French research institutes INRA and
Cirad use VLE. For example, the RECORD project
(Bergez et al., 2012) is a large platform designed for
developing and analyzing models of cropping sys-
tems.
3.1 VLE: Virtual Laboratory
Environment
VLE is a set of programs and libraries software.
These components are used to model, to simulate and
to analyze multimodel. VLE offers a set of formalism
developed with a DEVS BUS (Kim and Kim, 1996).
The sub-formalisms are DESS, QSS 1 and QSS 2
numerical procedure for solving ordinary differential
equations, Petri nets, finite state automaton (moore,
mealy, FDDEVS and Harel statechart (Harel, 1987)),
cellular automaton (Cell-DEVS and Cell-QSS) and
agent decision making. These extensions are devel-
oped using a DEVS BUS i.e. these extensions are de-
veloped such as atomic model. Finally, VLE uses an
open-source license and all the source code are avail-
able on its website including this observation exten-
sion.
DEVS BUS
• Scheduller,
• Network.
Simulator
Petrinet
Simulator
QSS 2
(x, t)
(y, t)
(∗, t)
(done, tN)
Figure 6: DEVS BUS and multi-modeling. The events
(x,t), (y,t), (∗,t), (done,tN) represent the bus.
3.2 Implementation
In our implementation of the PDEVS abstract simu-
lator, we define an atomic model as a classical C++
class. Modeler must this class inherits this class to
override the observation function and to benefit to the
observation extension developed in the previous sec-
tion
The listing 4 shows a simplified representation
(without constructor, destructor, and other members)
of the class which permits to develop atomic model
behavior:
• l. 3-14: the classic PDEVS functions: ta, δ
int
, δ
ext
,
λ and δ
con
.
• l. 15: the observation method is called when an
observation event arrived on a input observation
ObservationsofDiscreteEventModels
39

Listing 4: The C++ interface of the simulators in VLE.
1class Dynamics {
2public:
3virtual Time timeAdvance() const;
4virtual void internalTransition(
5const Time& time);
6virtual void externalTransition(
7const Time& time,
8const ExternalEventList& lst);
9virtual void output(
10const Time& time,
11ExternalEventList& out) const;
12virtual void confluentTransition(
13const Time& time,
14const ExternalEventList& lst);
15virtual Value* observation(
16const ObservationEvent& event) const;
17};
port X
obs
. λ
obs
is also a constant function to pre-
vent user to modify the state of its model. This
function returns a Value (simple type as integer,
real, Boolean, string, and complex type as set, dic-
tionary, matrix.).
Thus, the observation function of the simulator
that implements the Euler method (a numerical pro-
cedure for solving ordinary differential equations) in
VLE, the C++ code is:
1 Value* Euler::observation(
2 const ObservationEvent& event) const
3 {
4 double e = event.getTime() - mLastTime;
5
6 return getEstimatedValue(e);
7 }
The function getEstimatedValue calculates an
approximation of the value of the variable. It uses
the current value of the state variable and the time
elapsed since the last transition. This observation
function does not change the current state of the vari-
able. Thus, we respect the reproducibility of the sim-
ulation. However, we create additional cost calcu-
lations for each observation. This extra cost can be
important if the observation function is complex and
if called often. However, we believe that observing
a model often is only needed when debugging the
model.
3.3 Using Models with VLE
The study of the models is very important in the mod-
eling and simulation cycle. Generally, this analysis is
performed with an experimental setting. Experimen-
tal frames as sensitivity analysis, replicas generation
are used to study or to validate models. One impor-
tant motivation in formalizing the observation process
in PDEVS is to develop generic experimental frames,
which ones rely on intensive observation of models.
VLE is an environment for M&S. It relies on a
set of libraries for modeling, simulation and analy-
sis. These libraries developed in C++ are available
for several programming languages. Thus, in order
to collaborate with users of statistical tools, we pro-
vide an interface to the program R (R Development
Core Team, 2012). R is a tool and language for statis-
tical computing. This package named RVLE allows
the user to run simulations, changes its parameters
and retrieves simulation results (from the extension
observation). This package combined with another
packages of R as the classical sensitity package per-
mit to build experimental frames to validate, explore
and optimize models. On this principle, we also offer
program and PYVLE JVLE to develop web services
based on simulation.
4 CONCLUSIONS
In this paper, in section 2, we extend the PDEVS for-
malism to introduce the observation of models in the
formalism. This work was motivated by the separa-
tion between the dynamics of the system and its ob-
servation as a fundamental issue. This addition to the
formalism is closed under coupling and allows build-
ing observations in a hierarchical and modular man-
ner. The abstract simulators necessary for this exten-
sion were provided. In addition, we provided an im-
plementation of this observation extension in the VLE
simulators. This DEVS extension is crucial for us to
develop experimental design and to abstract observa-
tion from models dynamic. However, a type of obser-
vation is missing in these works. It concerns the event
observation of atomic models. In PDEVS terminol-
ogy, after each change in δ
int
, δ
ext
or δ
con
transition
functions. We work on the formalization of this new
type of observation.
REFERENCES
Bergero, F. and Kofman, E. (2010). PowerDEVS: a tool
for hybrid system modeling and real-time simulation.
SIMULATION.
Bergez, J.-E., Chabrier, P., Gary, C., Jeuffroy, M.,
Makowski, D., Quesnel, G., Ramat, E., Raynal, H.,
Rousse, N., Wallach, D., Debaeke, P., Durand, P.,
Duru, M., Dury, J., Faverdin, P., Gascuel-Odoux, C.,
and Garcia, F. (2012). An open platform to build, eval-
uate and simulate integrated models of farming and
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
40

agro-ecosystems. Environmental Modelling And Soft-
ware. In press.
Chow, A. and Zeigler, B. (1994). Parallel DEVS: a parallel,
hierarchical, modular, modeling formalism. In Pro-
ceedings of the 26th conference on Winter simulation,
pages 716–722, Orlando, Florida, United States.
Goldberg, D. (1991). What every computer scientist should
know about floating-point arithmetic. ACM Comput-
ing Surveys, 23:5–48.
Harel, D. (1987). Statecharts: A visual formalism for com-
plex systems. Sci. Comput. Program., 8:231–274.
Himmelspach, J. and Uhrmacher, A. M. (2009). The
JAMES II Framework for Modeling and Simula-
tion. In International Workshop on High Performance
Computational Systems Biology, pages 101–102.
Kim, Y. J. and Kim, T. G. (1996). A heterogeneous dis-
tributed simulation framework based on DEVS for-
malism. In Sixth Annual Conference On Artificial In-
telligence, Simulation and Planning in High Auton-
omy Systems, pages 116–121, La Jolla, California,
USA.
Kofman, E. (2002). A second order approximation for devs
simulation of continuous systems. Simulation (Jour-
nal of The Society for Computer Simulation Interna-
tional, 78(2):76–89.
Quesnel, G., Duboz, R., and Ramat, E. (2009). The Virtual
Laboratory Environment – An operational framework
for multi-modelling, simulation and analysis of com-
plex dynamical systems. Simulation Modelling Prac-
tice and Theory, 17:641–653.
R Development Core Team (2012). R: A Language and
Environment for Statistical Computing. R Foundation
for Statistical Computing, Vienna, Austria. ISBN 3-
900051-07-0.
Ribault, J., Dalle, O., Conan, D., and Leriche, S. (2010).
OSIF: a framework to instrument, validate, and ana-
lyze simulations. In SIMUTools ’10 Proceedings of
the 3rd International ICST Conference on Simulation
Tools and Techniques.
Vangheluwe, H. (2000). DEVS as a common denominator
for hybrid systems modelling. In Varga, A., editor,
IEEE International Symposium on Computer-Aided
Control System Design, pages 129–134, Anchorage,
Alaska. IEEE Computer Society Press.
Zeigler, B. P., Kim, D., and Praehofer, H. (2000). Theory of
modeling and simulation: Integrating Discrete Event
and Continuous Complex Dynamic Systems. Aca-
demic Press.
ObservationsofDiscreteEventModels
41
