
Enhancing the Performances of D-MASON
A Motivating Example
Michele Carillo
1
, Gennaro Cordasco
2
, Rosario De Chiara
1
,
Francesco Raia
1
, Vittorio Scarano
1
and Flavio Serrapica
1
1
ISISLab, Dipartimento di Informatica, Universit`a degli Studi di Salerno, Salerno, Italy
2
Dipartimento di Psicologia, Seconda Universit`a degli Studi di Napoli, Caserta, Italy
Keywords:
Agent-based Simulation, Load-balancing, Visualization of Distributed Models, Performance Evaluation.
Abstract:
Agent-based simulation models are an increasingly popular tool for research and management in many, dif-
ferent and diverse fields. In executing such simulations the “speed” is one of the most general and important
issues and the traditional answer to this issue is to invest resources in deploying a dedicated installation of ded-
icated computers, with highly specialized parallel applications, devoted to the purpose of achieving extreme
computational performances.
In this paper we present our experience with a distributed framework, D-MASON, that is a distributed version
of MASON, a well-known and popular library for writing and running Agent-based simulations. D-MASON
introduces the parallelization at framework level so that scientists that use the framework (domain expert but
with limited knowledge of distributed programming) can be only minimally aware of such distribution.
The framework allowed only a static decomposition of the work among workers, and was not able to cope
with load unbalance among them, therefore incurring in serious performance degradation where, for example,
many of the agents were concentrate on one specific part of the space. We elaborated two strategies for ame-
liorate the balancing and enhance the synchronization among workers. We present their design principles and
the experimental tests that validate our approach.
1 INTRODUCTION
Agent-Based simulation Models (ABMs) are an in-
creasingly popular tool for research and management
in many, different and diverse fields such as biology,
ecology, economics, political science, etc.. In some
fields, such as social sciences, ABMs are seen as a key
instrument (L´opez-Paredes et al., 2012) to the gener-
ative approach (Epstein, 2007), essential for under-
standing complex social phenomena. But also in pol-
icy making and economics (eco, 2010; for Economic
Co-operation and Forum, 2009), the relevance and ef-
fectiveness of ABMs is recently recognized.
Computer science community has responded to
the need for tools and platforms, that can help the de-
velopment and testing of new models in each specific
field, by providing tools, libraries and frameworks
that speed up and make easier the task of (massive)
simulations. Several important issues in evaluating
different platforms for ABM, well identified in the re-
views (Berryman, 2008; Najlis et al., 2001; Railsback
et al., 2006), are speed of execution, flexibility, repro-
ducibility, documentation, open-source and facilities
for recording and analyze data.
Our work is based on D-MASON, a parallel ver-
sion of the MASON library for writing and running
simulations of ABMs. D-MASON addresses, in par-
ticular, the speed of execution with no harm on other
features that characterize MASON. The intent of D-
MASON is to provide an effective and efficient way of
parallelizing MASON ABMs: effective because with
D-MASON you can do more (e.g. faster and/or larger
simulations) than what you can do with MASON; effi-
cient because, in order to obtain this additional com-
puting power, the developer has to do some incremen-
tal modifications to the MASON ABMs he has already
written without re-designing them.
While D-MASON is efficient and its scalability
has been proved to be high (Cordasco et al., 2011;
Cordasco et al., 2012), no load balancing mechanism
is available, thereby impeding any kind of dynamic
adaptation to the possible unbalance in the spatial de-
composition of the world where the agents are lo-
cated. This feature is extremely important in a class
137
Carillo M., Cordasco G., De Chiara R., Raia F., Scarano V. and Serrapica F..
Enhancing the Performances of D-MASON - A Motivating Example.
DOI: 10.5220/0004060501370143
In Proceedings of the 2nd International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH-2012),
pages 137-143
ISBN: 978-989-8565-20-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

of simulations where “spatially defined” goals have to
be pursued (i.e. a specific position must be searched
for and located by the agents) where all the agents are
probable to gather, thereby loading one node of the
distributed system more than the others.
In this paper we describe how, starting from a par-
allelization of a specific simulation, sprung two mod-
ifications of D-MASON that had measurable positive
effects on both performances and scalability.
Distributed Simulations. The research in many
fields that uses the simulation toolkits for ABMs
is often conducted interactively, since the “genera-
tive” paradigm described in (Epstein, 2007) describes
an iterative methodology where models are designed
tested and refined to reach the generation of an out-
come with a simple generative approach. In this con-
text, given that scientists of the specific domain of-
ten are not computer scientists, usually they do not
have access to systems for high performances com-
putations for a long time, and usually they have to
perform preliminary studies within their limited re-
sources and, only later (if needed), allow extensive
testing on large supercomputing centers. In social
sciences, for example, the need for “the capacity to
model and make up in parallel, reactive and cogni-
tive systems, and the means to observe their interac-
tions and emerging effects” (Conte and Castelfranchi,
1995) clearly outlined, since 1995, the needs of flexi-
ble, though powerful, tools.
In this scenario, D-MASON’s goal is to offer to
such scientists a setting where a traditional MASON
program can be run on one desktop, first, but can im-
mediately harness the power of other desktops in the
same laboratory (available, maybe, during off-peak
hours) by using D-MASON, thereby providing scal-
ing up the size they can treat or reducing significantly
the time needed for each iteration.
Of course, since the resulting distributed system,
collecting hardware from research labs, administra-
tion offices, etc. is highly heterogeneous in nature,
the challenge that is tackled by D-MASON is also
how to use efficiently all the hardware without an
impact on the “legitimate” user (i.e., the owner of
the desktop) both on performances and on installa-
tion/customization of the machine. On the other hand,
one of the objectives pursued by D-MASON is that the
program in MASON should not be very different than
the corresponding program in D-MASON so that the
scientist can easily modify it to run over an increasing
number of hosts.
The need for efficiency among the Agent-Based
modeling tools is well recognized in literature: many
reviews of state-of-the-art frameworks (Berryman,
2008; Najlis et al., 2001; Railsback et al., 2006) place
“speed” upfront as one of the most general and im-
portant issues. While a consistent work has been done
to allow the distribution of agents on several comput-
ing nodes (see (Collier and North, 2011; Mengistu
et al., 2008; Pawlaszczyk and Strassburger, 2009)),
D-MASON’s claims to have a different approach in
principle: distribution is introduced at the framework
level, so that scientists who use the framework (do-
main experts but with limited knowledge of computer
programming and systems) can be unaware of such
distribution. Several works in this field (Collier and
North, 2011; Mengistu et al., 2008; Pawlaszczyk and
Strassburger, 2009) directly affects the implementa-
tion and the architecture of a distributed agent model
(dealing with lazy synchronization etc.), D-MASON’s
approach is concentrated on the upper layer of the
simulation framework, thereby hiding, as much as
possible, the details of the architecture. In this way,
D-MASON provides a certain degree of backward-
compatibility with pre-existing MASON applications,
ensuring cost-effectivenessof porting a sequential im-
plementation into a distributed setting.
Outline of the Paper. The rest of the paper is orga-
nized as follows: Section 2 introduces D-MASON. In
Section 3, we briefly discuss our motivating example
Ants Foraging and introduce the two improvements
on D-MASON. In Section 4 we report on and discuss
the tests we performed on the enhanced version of D-
MASON. In Section 5, we conclude and discuss some
possible extensions of this work.
2 MASON AND D-MASON
Before presenting the features of D-MASON, we will,
briefly, introduce MASON.
MASON. MASON toolkit is a discrete-event simu-
lation core and visualization library written in Java,
designed to be used for a wide range of ABMs. The
toolkit is composed of two independent layers: the
simulation layer and the visualization layer. The sim-
ulation layer is the core of MASON and is mainly rep-
resented by an event scheduler and a variety of fields
which hold agents into a given simulation space. MA-
SON is mainly based on step-able agent: a computa-
tional entity which may be scheduled to perform some
action (step), and which can interact (communicate)
with other agents. The visualization layer permits
both visualization and manipulation of the model.
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
138
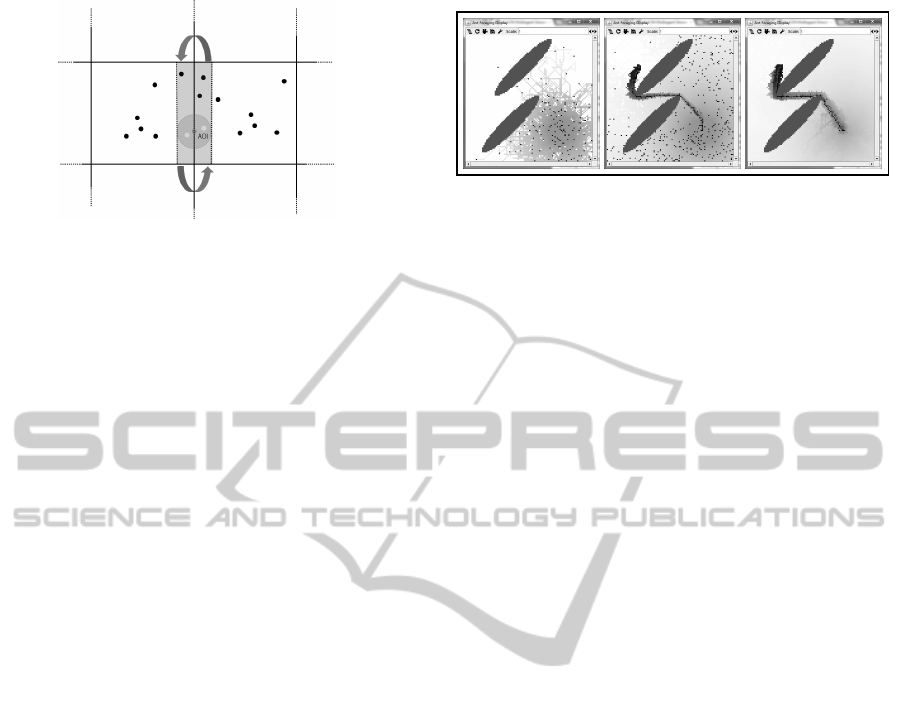
Figure 1: Field partitioning.
D-MASON. D-MASON adds a new layer named
D-simulation which extends the MASON simulation
layer. The new layer adds some features that allows
the distribution of the simulation work on multiple,
even heterogeneous, machines (workers). Notice that
the new layer does not alter in any way the existing
layers. Moreover, it has been designed so as to en-
able the porting of existing applications on distributed
platforms in a transparent and easy way.
From a functional point of view D-MASON archi-
tecture is divided into three functional blocks: Man-
agement, Workers and Communication. The Manage-
ment layer provides a master application which will
be used for coordinating the workers, handle the boot-
strap and running the simulation. D-MASON is based
on a master/workers paradigm which exploits a space
partitioning approach: the master partitions the space
to be simulated (the field) into regions (see Figure
1). Each region, together with the agents contained
in it, is assigned to a worker; then each worker is in
charge of: simulating the agents that belong to the as-
signed region; handling the migration of agents; man-
aging the synchronization between neighboring re-
gions (this information exchange is required in order
to let the simulation run consistently). Workers com-
municate by using a publish–subscribe mechanism.
D-MASON uses a standard approach to achieve
a consistent local synchronization of the distributed
simulations: each step is associated with a fixed state
of the simulation. Regions are simulated step by step.
Since the step i of region r is computed by using the
states i−1 of r’s neighborhood, the step i of a region
cannot be executed until the states i−1 of its neigh-
borhood have been computed and delivered. In other
words, each region is synchronized with its neighbor-
hood before each simulation step.
3 D-MASON IMPROVEMENTS
A Motivating Example: Ants Forage. In (Panait
and Luke, 2004b; Panait and Luke, 2004a; Panait
and Luke, 2004c) is described the Ants Forag-
Figure 2: Ants foraging (left to right): ants leave the nest,
part of the ants have found the food and head toward the
nest and all the ants walk along shortest path between the
food and the nest. The grey gradient represents the different
levels of pheromone.
ing Model. Ants Forage is an agent based sim-
ulation of the Ants Foraging Model and can be
found in the standard distribution of MASON (from
http://cs.gmu.edu/ eclab/projects/mason/). In Ants
Forage the space is represented by a grid of square
cells where there are some food sources, a nest and
a number of optional obstacles. When the simulation
starts, the ants leave the nest in search for the food.
Each ant occupying a cell may move to any of the
eight cells in the neighbor which is not occupied by
either other ants or an obstacle. When an ant reaches
a food source it becomes laden with food and begins
its search for the nest. When it has reached the nest
again, the ant leaves the food and begins searching
for food again. The goal is to maximize the rate of
food brought to the nest from the food sources. A
key factor of ants foraging simulation is that there is
no direct communication among agents: once an ant
finds the food source it does not communicate where
it is located to other component of the colony. On the
other hand, an indirect communication is provided by
pheromone trails: ants release two of different kinds
of pheromones on cells that have crossed depending
on where they are heading to, the nest or the food.
Pheromones evaporate over time therefore each cell
is associated with a level of pheromone that depends
on the time. Ants take local decisions that depend on
their state (going to the nest or going to the food), the
kind and level of pheromone that is located in adja-
cent cells.
In Figure 2 are depicted the three typical phases of
an ants foraging simulation, from left to right: in the
beginning they leave the nest wandering around so the
area around it is overcrowded; after a phase of equi-
librium during which the ants almost equally spread
in the field looking for food, some of the ants find it
and get back to the nest; the last phase is character-
ized, once again, by an uneven distribution of the ants
on the field along the shortest path between the nest
and the food source.
This kind of simulations, characterized by dy-
EnhancingthePerformancesofD-MASON-AMotivatingExample
139

namic unbalancing distribution of the agents through-
out the steps, motivates the need for a specific load
balancing policy that measures the amount of compu-
tational work needed by each worker to carry out the
simulation and, consequently, takes decisions about
how to re-distribute the work among workers. Ants
Forage is based on 5 different specialized fields: one
for the ants, two for the pheromones level, one for the
obstacles and one for food sources. The first three
fields are dynamic and updated at every step. Ants
Forage has pushed us to meditate about two needs:
3.1 Enhancing Communication
The performances of distributed systems, like D-
MASON, are strongly bound by the performances of
the slowest component in the system when the various
components (i.e. workers) needs to be synchronized.
In D-MASON the synchronization of the fields imme-
diately follows the simulation phase and is carried out
sequentially by running along the list of the dynamic
fields (static fields are not synchronized). Together
with each of field synchronization there is some over-
head due to both the communication channel and the
barrier, the mechanism which allows to the different
workers to “wait” for the slowest one to complete its
work and to begin the successive step on the same
time. Hence, synchronization phases adds dependen-
cies between the operations carried out by workers
that harm the parallelization process (Amdahl, 1967).
A reasonable solution to this waste of computing
power has been adopted by moving to a multi thread
communication phase during which all the updates on
the fields are transmitted in parallel reducing the com-
munication overhead. A single synchronization phase
is done at the end of all the communications.
3.2 Load Balancing
The Need for Load Balancing. As described be-
fore D-MASON uses a space partitioning approach
where the fields are subdivided in regions assigned
to workers; this approach allows to limit the commu-
nication among the workers. Indeed, since each agent
interacts only within a small area around it, the com-
munication is limited to local messages (messages be-
tween workers, managing neighboring spaces, etc.).
The problem with this approach is that agents can
migrate between regions and consequently the asso-
ciation between workers and agents changes during
the simulation. Moreover, load balancing is not guar-
anteed and needs to be addressed by the application.
To better exploit the computing power provided by
the workers of the system, it is necessary to design
the system so that the simulation always evolves in
parallel, avoiding bottlenecks. Since the simulation
is synchronized after each step, the system advances
with the same speed provided by the slower peer in
the system. For this reason it is necessary to design
the system in order to balance the load between the
workers.
Our Approach. The choice of the partitioning
strategy is important for the efficiency of the whole
system. Two key factors need to be considered: (i)
Static vs Dynamic Partitioning; (ii) The granularity
of the world decomposition. Dynamic partitioning
can be useful, for instance, when the workload of
the simulation changes along the time, as in the case
of Ants foraging. In this cases, in order to balance
the workload across the workers the system can adapt
the partitioning step by step. Unfortunately, the man-
agement of dynamic regions requires a large amount
of communication between workers that consumes
bandwidth and introduces latency. Similarly the gran-
ularity of the world decomposition (that is, the region
size and, consequently, the number of regions, which
a given space is partitioned into) determines a trade
off between load balancing and communication over-
head. The finer is the granularity adopted, the higher
is the balancing that, ideally, can be reached by the
system. However, due to regions’ interdependency
and system synchronizations, fine granularity usually
determines a huge amount of communication which
may harm the overall performances.
Based on the above considerations, we decided to
opt for a system that allows a dynamic partitioning
with two levels of granularity. At each step every
worker compares the amount of agents it has to sim-
ulate with the ideal number of agents per region, that
is the total number of ants divided by the number of
regions the field is split into. When the ratio between
this two values is above a given threshold the worker
decides to move on a finer granularity by splitting its
region.
The balancing phase is depicted in Figure 3: on
the left there is the field partitioned in 9 (3 × 3) re-
gions, this is the coarse grained subdivision of the
work, while in the middle image is depicted the fine
grained subdivision of the work. The last image
shows what happens when a worker decides to split
its region, in this particular case the worker that is
in charge of the central region decompose the region
in 9 sub-regions then assigns 8 of this sub-regions to
its 8 neighboring workers. Please note that each sub-
region is assigned in way that allows to minimize the
communication between the neighbors.
Symmetrically when a worker notices that the
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
140
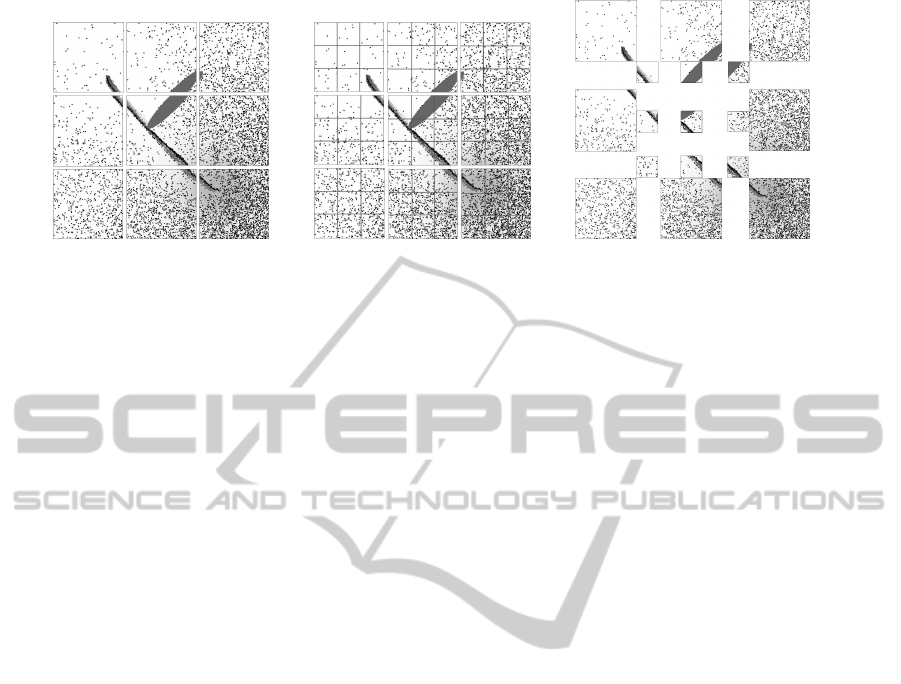
Figure 3: (Left to right): coarse grained partitioning, finer grained partitioning and balancing phase.
workload among the split subregions is below a given
threshold the worker may decide to merge back the
subregions returning to the initial (coarser) subdivi-
sion (Figure 3 (left)).
4 TESTING ENHANCED
D-MASON
We performed a number of tests of the enhanced ver-
sion of D-MASON in order to assess the effectiveness
of the two improvements described above.
Setting of the Experiments. Simulations were con-
ducted on a scenario consisting of two different con-
figuration of hosts/workers: for the enhanced com-
munication schema we conducted a series of tests on
a single host (CPU i7, 8GB RAM) while for the load
balancing experiments we also performed the tests on
a network of 6 machines: a master machine, one com-
munication server and 4 hosts each running an evenly
distributed amount of workers. In the load balanc-
ing tests, each region is simulated by using a dedi-
cated Java Virtual Machine (JVM). The communica-
tion is managed by a dedicated host running Apache
ActiveMQ Server. Master, workers and the communi-
cation server are connected using a standard 100Mbit
LAN network.
The DAnts Testbed. We have performed our tests
on DAnts, the distributed version of Ants Forage, by
considering more than 32 different test settings. Each
setting is characterized by the choice of the follow-
ing parameter: number of ants (the size of the field is
determined by the number of agents in order to main-
tain a fixed density), number of regions, the kind of
synchronization/load balancing policy.
4.1 Discussion of Results
In the following we will briefly discuss the results.
We have decided to test the two improvements by us-
ing an incremental approach, in the first set of tests
we tested the communication enhancement while in
the second batch we added the load balancing.
Enhanced Communication. The rationale behind
this test is to check the new communication mecha-
nism against the previous one. Figure 4 depicts two
square partitioning, 4×4 and 6×6. In each plot the X-
axis represents the increasing number of ants while on
the Y-axis are reported the performances of the sys-
tem in terms of simulation steps per second.
In both test settings the improved communication
strategy works more efficiently than the older one.
The reason why, as along as the number of agents in-
creases the delta between the curves decreases, is that
the impact of simulation time augments proportion-
ally to the number of agents while our improvement
affects only the communication phase.
Load balancing. The batch of tests we performed
simulates 100, 000 ants running in two settings: 1
host and 6 host. Each test lasted 40, 000 simulation
steps. In both settings we used 3.0 for the split thresh-
old (i.e., a worker decides to split its region when the
number of agents in the region are 3.0 times the ideal
number of agents per region) and 1.5 as the merge
threshold.
Figure 5 shows the results. In each plot the X-
axis represents the partitioning while on the Y-axis are
reported the performances of the system in terms of
simulation steps per second. The results are encour-
aging and show that the load balancing policy is effec-
tive in mitigating the unbalancing. A first considera-
tion must be done on the fact that by using load bal-
ancing is possible “to do more” with the D-MASON
even on a single machine. In the multiple machines
EnhancingthePerformancesofD-MASON-AMotivatingExample
141
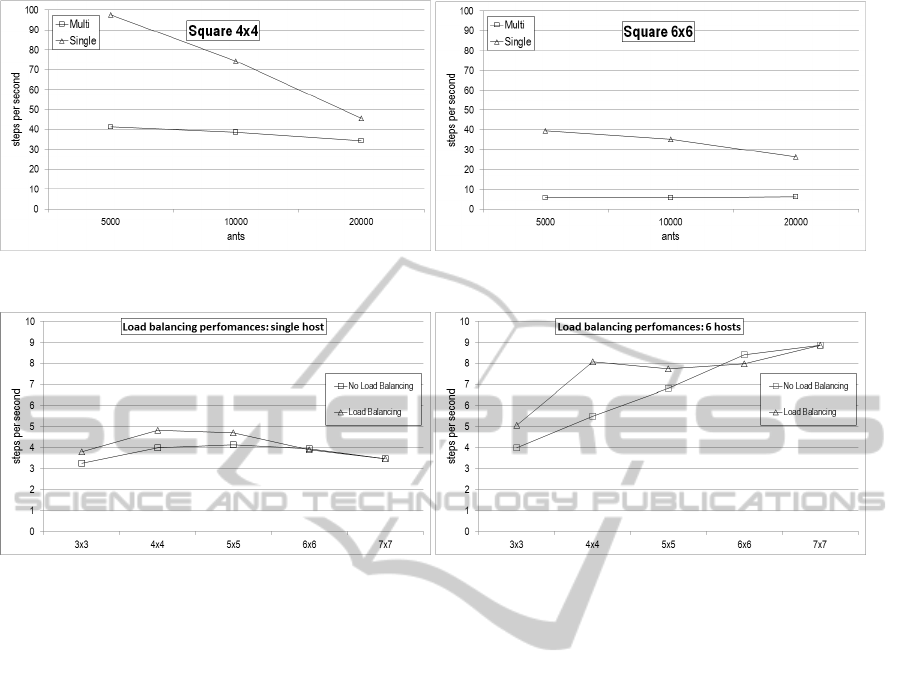
Figure 4: Multi message vs single message.
Figure 5: D-MASON load balancing effectiveness.
setting we can obtain even better improvements be-
cause in the previous setting the load balancing was
performed on workers running on a single host, while
in this setting each host is serving a smaller number of
workers. Clearly as the number of regions increases
the finer granularity of the subdivision naturally bal-
ance better the load but, on the other hand, the com-
munication overhead increases, coherently, limiting
the overall improvement.
5 CONCLUSIONS AND FUTURE
WORK
This paper reports our experience with D-MASON a
distributed version of MASON. D-MASON has been
developed with the purpose of speeding up the perfor-
mances of MASON by letting the computational work
to be distributed among several machines. Hence
by harvesting the unused CPU power usually largely
available in installations like laboratories.
This work has been motivated by the develop-
ment of the distributed version of Ants Forage. We
observed that this kind of simulations have common
characteristics that needed to be better addressed by
D-MASON: (i) the simulation is based on more than
a field dynamically updated during the simulation; (ii)
agents are not balanced among the space often accu-
mulating in some zones. We have showed two strate-
gies that deal with the issues presented above and we
have validated the effectiveness of the strategies by
several experimental tests.
Some work still need to be done, for in-
stance the load balancing policy has to be tuned
in order to better exploit the work subdivision,
the control of the thresholds is the key to lever-
age this mechanism. D-MASON is available at
http://www.isislab.it/projects/dmason/. The project
will be soon released under a Free and Open Software
license.
REFERENCES
The Economist (2010). Agents of change.
Amdahl, G. M. (1967). Validity of the single processor ap-
proach to achieving large scale computing capabili-
ties. In Proceedings of AFIPS ’67, pages 483–485.
Berryman, M. (2008). Review of Software Platforms for
Agent Based Models. Tech. Rep. DSTO-GD-0532,
Australian Government, Department of Defence.
Collier, N. and North, M. (2011). A platform for large-scale
agent-based modeling. In W. Dubitzky, K. Kurowski,
and B. Schott, eds., Large-Scale Computing Tech-
niques for Complex System Simulations, Wiley.
SIMULTECH2012-2ndInternationalConferenceonSimulationandModelingMethodologies,Technologiesand
Applications
142

Conte, R. and Castelfranchi, C. (1995). Cognitive and So-
cial Action. UCL Press.
Cordasco, G., De Chiara, R., Mancuso, A., Mazzeo, D.,
Scarano, V., and Spagnuolo, C. (2011). A Frame-
work for distributing Agent-based simulations. In
Ninth Inter. Workshop on Algorithms, Models and
Tools for Parallel Computing on Heterogeneous Plat-
forms (HeteroPar’2011).
Cordasco, G., De Chiara, R., Mancuso, A., Mazzeo, D.,
Scarano, V., and Spagnuolo, C. (2012). D-MASON:
A Distributed Framework for Agent-based simula-
tions. Simulation SI: Advancing Simulation Theory
and Practice with Distributed Computing, (Submit-
ted).
Epstein, J. M. (2007). Generative Social Science: Studies
in Agent-Based Computational Modeling. Princeton
University Press.
For Economic Co-operation, O. and Forum, D. O. G. S.
(2009). Applications of complexity science for pub-
lic policy: new tools for finding unanticipated conse-
quences and unrealized opportunities.
L´opez-Paredes, A., Edmonds, B., and Klugl, F. (2012). Ed-
itorial of the special issue: Agent based simulation of
complex social systems. Simulation, 88(1):4–6.
Mengistu, D., Troger, P., Lundberg, L., and Davidsson, P.
(2008). Scalability in Distributed Multi-Agent Based
Simulations: The JADE Case. In Proc. of FGCNS ’08,
volume 5, pages 93–99.
Najlis, R., Janssen, M. A., and Parkerx, D. C. (2001).
Software tools and communication issues. In Parker,
D. C., Berger, T., and Manson, S. M., editors, Proc.
Agent-Based Models of Land-Use and Land-Cover
Change Workshop, pages 17–30.
Panait, L. and Luke, S. (2004a). Ant foraging revisited.
In Proceedings of the Ninth International Conference
on the Simulation and Synthesis of Living Systems
(ALIFE-IX).
Panait, L. and Luke, S. (2004b). Learning ant foraging
behaviors. In Proceedings of the Ninth International
Conference on the Simulation and Synthesis of Living
Systems (ALIFE-IX).
Panait, L. and Luke, S. (2004c). A pheromone-based utility
model for collaborative foraging. In Proceedings of
AAMAS 2004.
Pawlaszczyk, D. and Strassburger, S. (2009). Scalability
in distributed simulations of agent-based models. In
Proc. of WSC 2009, pages 1189–1200.
Railsback, S. F., Lytinen, S. L., and Jackson, S. K. (2006).
Agent-based simulation platforms: Review and devel-
opment recommendations. Simulation, 82:609–623.
EnhancingthePerformancesofD-MASON-AMotivatingExample
143
