
Improved NetArgus
A Suite of Wi-fi Positioning & SNMP Monitor
Tryfon Theodorou
1
, George Violettas
1
, Antigoni Polychroniadou
2
and Christos Georgiadis
1
1
University of Macedonia, 156, Egnatia Street, 54006, Thessaloniki, Greece
2
Royal Holloway University of London, Egham, U.K.
Keywords: Wi-fi Positioning, Kalman Filter, SNMP, FSPL, RTLS.
Abstract: In this paper, field research was conducted in order to enrich and strengthen the “NetArgus” application that
is able to monitor either a wired or a wireless network with all its possible aspects. Original algorithms were
implemented in an effort to find the position of a moving station utilizing the signal level of wireless local
area network (WLAN) devices. Exhausting sampling and research were done, in order to resolve various
practical problems associated with the signal level of the wireless stations as well as the involved hardware.
Various flaws and omissions of 802.11x protocols were discovered, such as the lack of definition of the
signal level and its width range. Moreover, a plethora of positioning practical problems has been adequately
managed. Hence, an application was constructed to draw paths and manipulate proper information from
various network moving clients, using the Simple Network Management Protocol (SNMP) as well as low
level operating system libraries. Last but not least, “Kalman Filter” was implemented and fully tested in
order to correct the positioning unavoidable mistakes.
1 INTRODUCTION
This paper is an extended-updated and improved
version of (Violettas et al., 2009). The aim of the
essay was to use the Wi-Fi available information for
finding the position of a station. SNMP protocol was
used for a central management and possible central
guidance of such devices. In addition, Kalman filter
(KF) is implemented in order to derive the correct
positioning estimates.
Practical problems of positioning were solved,
by creating the NetArgus application, which draws
information from network devices using various low
level operating system libraries like Microsoft WMI
and NDIS revealing several flaws and lacks. It was
proven that only NDIS library is functional.
The NetArgus application is open source, it
permits any kind of parameterization and it exploits
all the new technologies. This modular application
consists of 3 basic segments, providing the ability to
install every part of it to the most convenient part of
the network. The GUI user part is location
independent. This application manipulates all the
necessary information. Thus, an SQL database stores
in real time the SNMP available information
together with the signal level information sent by the
moving stations through the application created for
that purpose. A server application derives data from
the database and it calculates the position of the
moving stations in real time. It also stores and
manipulates all the provided SNMP information.
The client application pictures in a 2-axis graphical
interface the position of the network elements, in
real time too.
A theoretical barrier of the 802.11 signal level
strength measurement was discovered, due to
limitations of the implementation of this specific
variable as an integer (the gap between two
consecutive integer numbers in a logarithmic
function is resulting in a minimum error). For the
purposes of this updated version, extensive practical
research was done in order to add Kalman Filter
(KF) to the application. Hence, we describe the
theory of KF, its implementation and the extensive
testing of it.
2 RELATED WORK
The systems introduced to find the location of a
moving target are called Real Time Location System
(RTLS). Cisco (CISC Systems, 2006) has
289
Theodorou T., Violettas G., Polychroniadou A. and Georgiadis C..
Improved NetArgus - A Suite of Wi-fi Positioning & SNMP Monitor.
DOI: 10.5220/0004077902890294
In Proceedings of the International Conference on Signal Processing and Multimedia Applications and Wireless Information Networks and Systems
(WINSYS-2012), pages 289-294
ISBN: 978-989-8565-25-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

implemented such a system addressed mainly to
closed spaces. It is a commercial (not open sourced)
system, cooperating with various hardware vendors,
which combines software and hardware (Wi-Fi
tags). Aeroscout is the first company introduced in
2003 an RFID tag compatible with Wi-Fi. As a
result, it is possible to find the position of the target
carrying this tag. The closest to this implementation
is the “Ekahau” system, a not open source
commercial system. It operates in open and close
spaces and it seems to dominate the market,
basically because of the accuracy, but also because it
is not using any hardware, being able to cooperate
with various systems and vendors.
Most of the papers investigated were vague
(probably on purpose, due to the future commercial
applications). A demanding job is described in
(Interlink Networks, 2002). It describes the
possibility of physically locating the position of a
wireless intruder into a corporate network. An
interesting job is also described in (Bahl et al.,
2000). They faced the same problems, such as the
extraction of the signal level info (without revealing
much), the statistical error, and the distance from the
broadcasting station. In (Seppänen et al., 2003) the
extraction of the signal level through SNMP is
described. It will be shown, that this is not always
possible. The essay in (Kotanen et al., 2003) has
some very interesting ideas, and it was the main
inspiration for the KF work. So far the authors are
not aware of such a work combining SNMP with
Wi-Fi positioning.
3 DISCRETE TIME OPTIMAL
FILTERS & PREDICTORS
The objective of such systems is to calculate “best”
estimates of a state vector sequence
k
x
in the
discrete interval
max
0 kk
. Those estimates are
based on all available (previous) information about
the system and measurement(s) taken during the
time interval. The time increment
1kk
tt
is usually
constant, although not necessarily so.
The estimation problems fall into 3 categories:
1) If all the measurements are known prior to the
appliance of the filter, then a smoother can be applied
to the data.
2) If the time of calculation is synchronous with the
time of the computation, then the filter has to take
into consideration only previous data and is called a
filter, as it “filters out” the noise of the system.
3) If an estimate of the system’s position in future
time is needed, then the filter is called a predictor.
Usually the smother is producing better results due
to the usage of more data.
3.1 Kalman Filter
The purpose of a filter is to compute the state
estimate, while an optimal filter minimizes the
spread of the estimate- probability density in the
process. A recursive optimal filter will propagate the
conditional probability density function from one
sampling to the next, taking into account system
dynamics and inputs (Stengel,. 1994). Computing
the weighting factors (also called filter gains), which
optimally combine samples and future states, is the
crucial step of the computation and the only part that
needs extensive practical work.
“Kalman Filter opens the way to the maximum
likelihood estimation of the unknown parameters in
a model…”(Harvey, 1990). A KF may be applied
for prediction and smoothing on models put in state
space form. It is usually described by the following
linear difference equation (Kalman, 1960):
111kk kk
xAx Bu w
(1)
with a measurement
m
z
that is
kkk
zHxv
(2)
The random variables
k
w
and
k
v
are process &
measurement error factors. They are independent,
white and with normal probability distributions, i.e.
we assume that
()~ (0, )pw N Q
and
()~ (0, )pv N R
. The
nn
matrix A in (1), relates the previous step
at k-1 to the current step k. The
1n
matrix B in (1)
relates the optional control input
l
u
to the state
x. The
mn
matrix
H
in (2) relates the state to the
measurement
k
z
(2).
According to the above, applied KF needs only
the previous position (state) of the system to
calculate its current state. Combined with the
measured position (state), the system outputs the
current estimated position.
If the position of a moving station on a given
moment is
k
x
and this position is sampled every
time fraction t, then the position of the moving
station is described as follows:
1ktk tk
xTx Ra
(3)
Where α is the acceleration of the moving station (if
the speed of the moving station is constant, then
WINSYS 2012 - International Conference on Wireless Information Networks and Systems
290

obviously α=1) and
1
01
t
t
T
and
2
2
t
t
R
t
.
3.2 Kalman Filter in Practice
For the needs of the current paper, KF in its simple
form was used. The best practical explanation found
for KF, was the one in (G. Welch and G. Bishop,
1995). Eq. (1) and (2) are directly depicted from it.
In addition KF in practice needs to define the
following states:
ˆ
n
k
x
to be the “a priori” state estimate at
state k given knowledge, and
ˆ
n
k
x
the “a
posteriori” state estimate at step k , given the
measurement
k
z
.Then the estimate errors can be
defined as follows:
ˆ
kkk
exx
, as the a priory error, and its error
covariance
T
kkk
PEee
(4)
ˆ
kkk
exx
, as the a posteriori error, and its error
covariance
T
kkk
PEee
(5)
Then, the final KF equation can be described as
ˆˆ ˆ
kk k k
xxKzHx
(6)
where
ˆ
kk
zHx
is the residual reflecting the
discrepancy between the predicted measurement
ˆ
k
Hx
and the actual measurement
k
z
. If those two
are equal, then obviously the residual equals to zero,
or in other words there is no difference between the
predicted and the measured state of the system.
According to (Welch and Bishop, 1995). one form
of K that minimizes (5) is (7):
1
TT
kk k
KPHHPHR
(7)
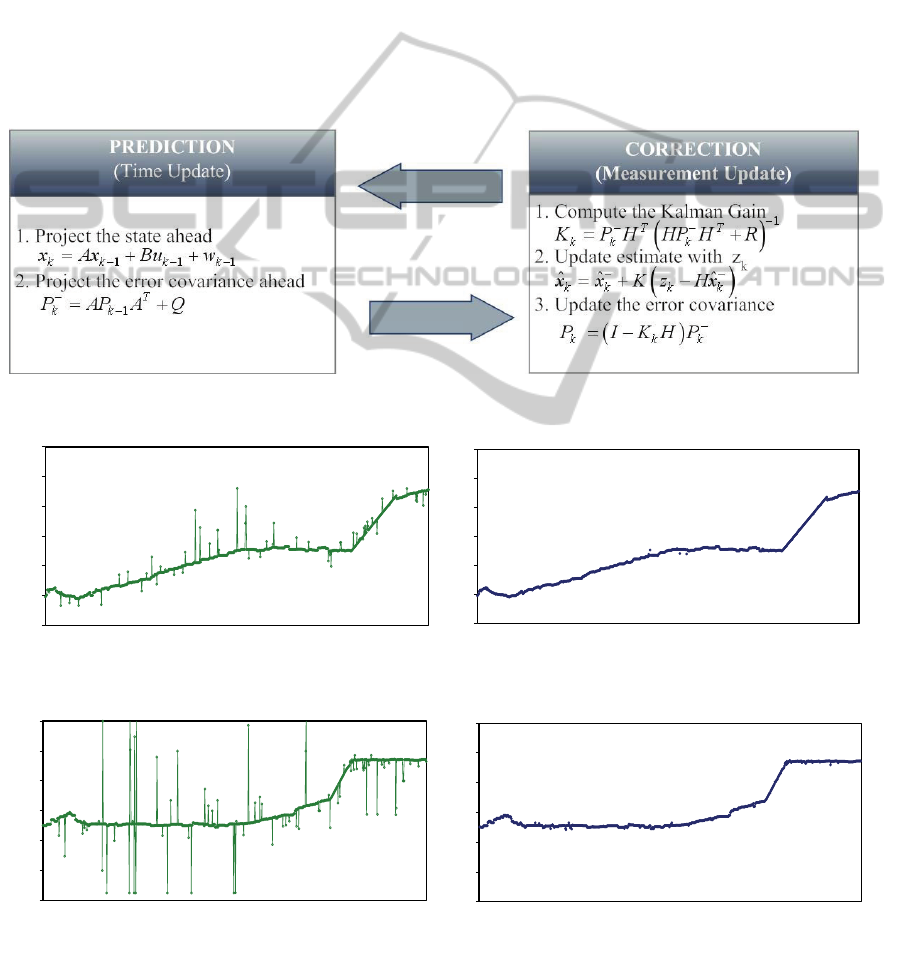
A practical representation of the two discrete
(“predict” & “update”) phases of the KF, are
described in Fig. 1. Notice that when initial
estimates
10k
xx
and
10k
PP
are known, they
can be inserted once, at the start of “predict” state.
Otherwise if the filter begins at the middle of the
process, x
k-1
and P
k-1
are set to an arbitrary high (or
respectively low) value, so the system will
immediately ignore them, taking into consideration
the first actual measurement(s).
As the filter was implemented,
1k
w
in (1) was
ignored. Matrixes Q & R were first arbitrary set, and
there was a lot of discussion whether those values
can be set in general. Since more than one (different)
systems were not available, it remains an open
question. The wisest strategy would be to set those
matrixes after long observation, of each particular
system.
3.3 Kalman Filter Appliance Results &
Comparison Charts
For the implementation of the KF, there was a big
set of data available. This data was collected in an
open area system, roughly described as follows:
In an area of approximately 1,2Km
2
, there were
13 APs implemented, covering the area at a non
optimal way (there were “holes” – dead zones of
signal coverage in the area).
A moving station recorded its own movement
repeatedly in the area. Most of the research was
based on this set of data. Time sampling was
arbitrary set to 1 sec. This can be easily altered
depending on each particular system needs (speed of
movement is usually determining the time
sampling). The area was transferred to a digital map
of 600X600 pixels. Axes X,Y are mapped to each
dimension of the map, by a scale of 1 meter to 1
pixel (1:1).
As Fig.2-3 is demonstrating, the recorded
movement was far from being described as optimal.
There was a lot of distortion and noise. Most
important, there were several samples taken
indicating positions completely outside the area
drawn on the map. These are the result of the
weaknesses of the system described at (Violettas et
al., 2009) plus the high noise of the surrounding
area.
After the appliance of the KF as depicted in Fig.
2-3, an almost optimal movement is demonstrated,
in perfect accordance with the theory of KF.
Because KF is taking into consideration all the
data available to predict the position, if a really
distant point is inserted into KF it obviously affects
the prediction (although in a very small fraction due
to the nature of the filter). In order to avoid data that
is obviously useless, before the data is passed to the
KF there should be a simpler filter asking the
following question:
If a station is moving with a speed of 5m/s, is it
possible to alter its position by 10 meters from one
second to the next and then return to a normal speed
again? Obviously not, so this measurement should
be disqualified.
Improved NetArgus - A Suite of Wi-fi Positioning & SNMP Monitor
291
Because of this problem (i.e. when a much distanced
point suddenly “appears” inside the smooth-like
movement), an algorithm for disqualifying this kind
of data was implemented. More specifically, the
algorithm is examining each set of data checking if it
is different from the previous and the next set of
data, more than one threshold. If it is, then this set of
data is disqualified, and it is not taken into
consideration at all. The threshold of the algorithm is
still an open debate, as it highly relates to the nature
of the movement (e.g. the threshold should be much
smaller for a pedestrian walk than the one for a
moving car).
4 ARCHITECTHURE AND
IMPLEMENTATION OF THE
“NETARGUS” SYSTEM
The “NetArgus” application collects the available
SNMP information from the network devices in
order to construct the network structure and to
investigate its status. NetArgus is a 3-tier network
application that operates over TCP/IP networks. The
system uses Microsoft SQL Server 2005 for data
storage. The NetArgus System application is divided
into three separate applications, which communicate
using the common database and TCP/IP network
messages. In detail:
Figure 1: Kalman filter in action.
Figure 2: Movement trails along axes X, Y, before & after Kalman Filter.
0
100
200
300
400
500
600
13:17
13:17
13:17
13:18
13:18
13:19
13:19
13:20
13:20
13:20
13:21
13:21
13:22
13:22
13:23
13:23
13:23
13:24
13:24
13:25
13:25
13:26
13:26
13:26
13:27
13:27
13:28
13:28
13:29
13:29
13:30
Movement in betewwen [0.600] pixels
Time Fraction (Min)
Movement Trails Before Kalman Filter along X axis
0
100
200
300
400
500
600
13:17
13:17
13:17
13:18
13:18
13:19
13:19
13:20
13:20
13:20
13:21
13:21
13:22
13:22
13:23
13:23
13:23
13:24
13:24
13:25
13:25
13:26
13:26
13:26
13:27
13:27
13:28
13:28
13:29
13:29
13:30
Movement in betewwen [0.600] pixels
Time Fraction (Min)
Movement Trails Before Kalman Filter along Y axis
0
100
200
300
400
500
600
13:17
13:17
13:17
13:18
13:18
13:19
13:19
13:20
13:20
13:20
13:21
13:21
13:22
13:22
13:23
13:23
13:23
13:24
13:24
13:25
13:25
13:26
13:26
13:26
13:27
13:27
13:28
13:28
13:29
13:29
13:30
Movement in betewwen [0.600] pixels
Time Fraction (Min)
Movement Trails After Kalman Filter along X axis
0
100
200
300
400
500
600
13:17
13:17
13:17
13:18
13:18
13:19
13:19
13:20
13:20
13:20
13:21
13:21
13:22
13:22
13:23
13:23
13:23
13:24
13:24
13:25
13:25
13:26
13:26
13:26
13:27
13:27
13:28
13:28
13:29
13:29
13:30
Movement in betewwen [0.600] pixels
Time Fraction (Min)
Movement Trails After Kalman Filter along Y axis
WINSYS 2012 - International Conference on Wireless Information Networks and Systems
292
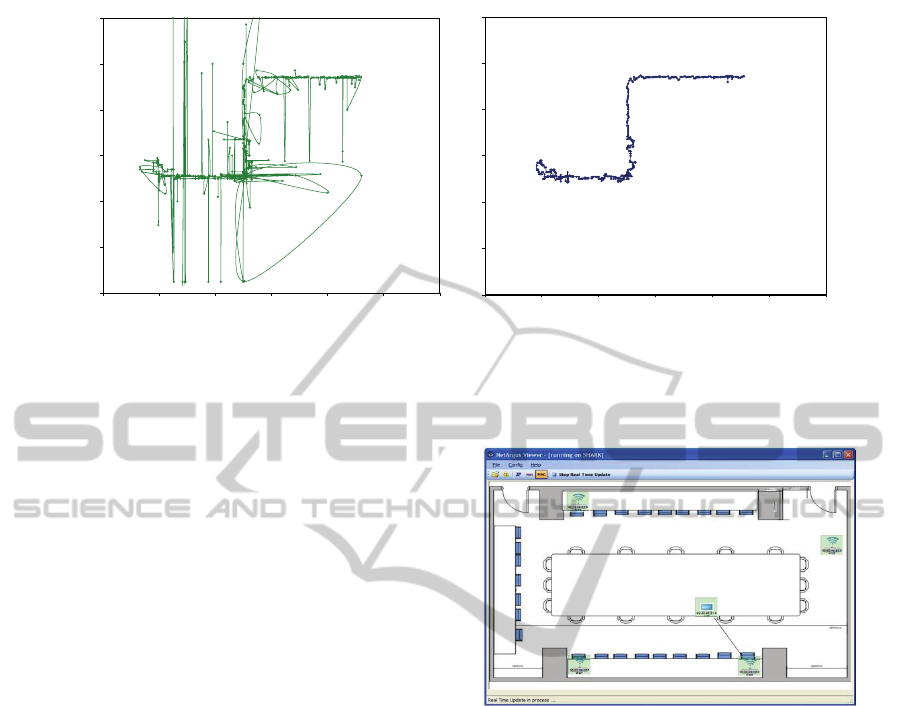
Figure 3 . Movement Trails along 2-D space maped, before & after Kalman Filter.
4.1 NetArgus Client, Server, Viewer
This is the part of the software that is installed in the
moving client’s PC. It sends in real time the signal
level of all the APs in its region thought the wireless
network card. The collected information is stored in
the database. NetArgus Client also collects
information about the AP’s Mac Address, SSID,
Security protocol, Network type, speed, etc. in order
to fill the database with as much information as it
can.
It should be noted, that the application can easily
carry SNMP information or any extra information
provided by another I/O device. E.g. in Fig. 13, the
NetArgus Client (at the upper right corner) is
transmitting to the NetArgus Server the details (id)
of a specific cargo named “Container CODE 1”,
inserted by an RFID reader, any other source or even
manually.
The application runs as a process in the
background and it can be started or stopped using a
tray icon. The signal level sampling time and the
database location can be configured by the user
through a windows form.
The second part of the application is the Server-
side application. It reads information from the
moving client (with the NetArgus application
installed) and by using the triangulation algorithm
described in (G.E. Violettas et al., 2009)., computes
the absolute position of the above client, storing that
information into the server database.
The server also does the entire SNMP related
job. It stores the SNMP collected information, in
addition to the collected information from the Wi-Fi
signaling.
This is the graphical representation module that
is used for presenting the network devices and the
network structure on a map. Moreover it shows in
real time the movement of the mobile clients in the
covered area (Fig. 4).
Figure 4: NetArgus Viewer, with Classroom map.
5 CONCLUSIONS
The aim of this paper was to create an application
for finding the position of a station. So, a three-tier
distributed application was created, following all the
modern design patterns. The positioning finding
algorithms are running in real time, finding the trail
of the moving station(s). However, due to the fact
that noise exists, the addition of the KF addressed
this problem with very accurate results. Thus, KF
corrects (optimizes) those trails. The NetArgus
Client is installed in every moving station we care of
finding its position. It continuously sends to the
database the received Signal level from all the APs
within its reach. The application was tested in
various harsh environments in real time. It did find
the position of the station with a relative accuracy.
Valuable results were gathered according to the
quality of the received signal, the distance between
station and the hardware used, specially the
0
100
200
300
400
500
600
0 100 200 300 400 500 600
Pixels in Y axis
Pixels in X axis
Movement Trails in 2-Dimension Space (X,Y) - Before Kalman filtering
0
100
200
300
400
500
600
0 100 200 300 400 500 6
0
Pixels in Y axis
Pixels in X axis
Movement Trails in 2-Dimension Space (X,Y) - Before Kalman filtering
Improved NetArgus - A Suite of Wi-fi Positioning & SNMP Monitor
293
differences between various vendors.
6 FUTURE WORK
Various additions can be easily made in SNMP, such
as exporting results of routing loads of a network
and the possible optimization through dynamic
routing protocols (RIP, BGP, IGMP), or possible
implementation of network watch applications e.g.,
clever water leakage sensors. As for 802.11
protocols, there is a wide area open. This is the
roaming protocol between the transmitting APs. The
802.11 protocol gives some general directions, but
every manufacturer implements its own methods
(most of the times without documentation) making
the possibility of roaming between devices of
different vendors, almost impossible. Moreover, the
positioning finding algorithms can be improved and
expanded specially on the direction of including
smart devices such as telephones, active tags etc.
Augmented Reality (AR) is another very
promising field of interest. For years, AR’s usage
has been restricted to high-end settings. Now,
though, AR is beginning to move into more
consumer settings, and the technology may be ready
to become more commonplace and commercially
successful. AR provides a digital enrichment of the
physical world. More specifically, it projects images
or information that augments what users see. For
example, when users view their surroundings via the
camera, an application displays information about
nearby shops, restaurants, and other landmarks.
According to “Computer” magazine (Vaughan-
Nichols, 2009) “location-based services (LBS)—
used with smart phones and other types of mobile
technology—are a major driving force behind AR's
entering the mainstream”.
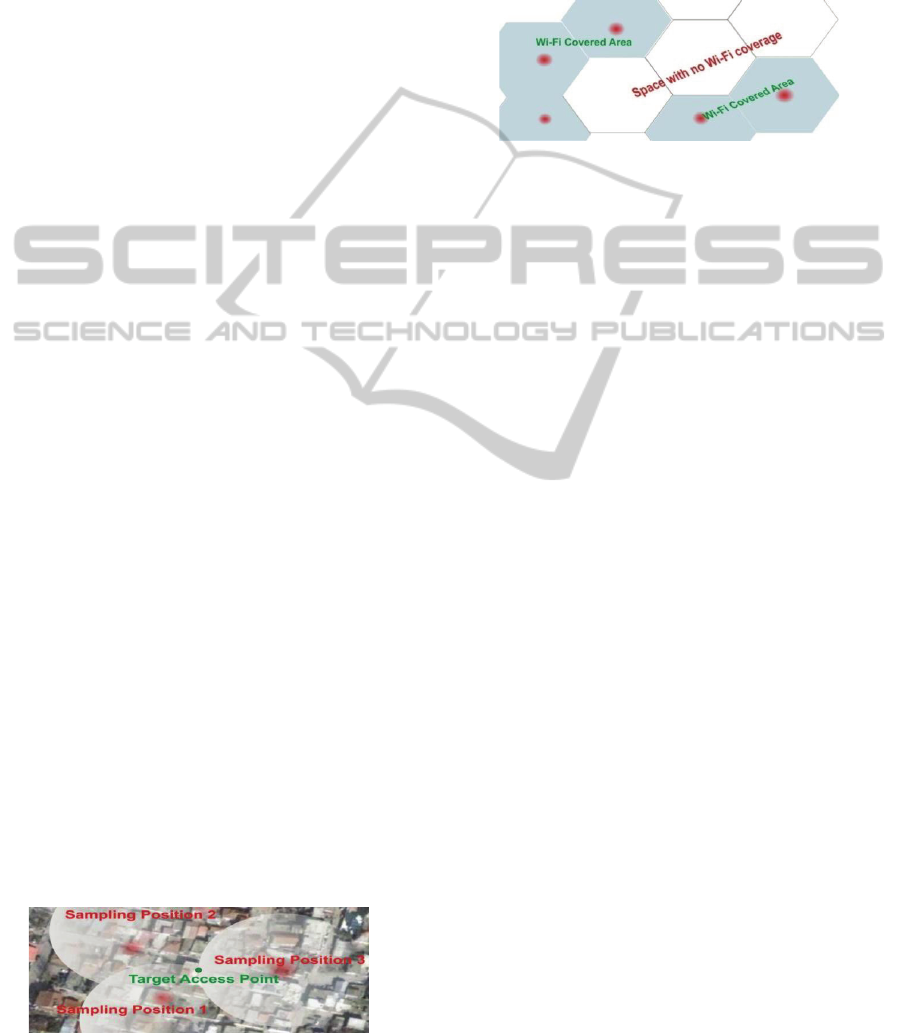
The NetArgus can be firstly used for Finding the
Physical Position of a Transmitting 802.11 Station.
More specifically, with the use of any kind of vector
maps (e.g. Google Earth), or any kind of DEM maps
with Latitude & Longitude information, measuring
up the signal strength at three random spots (Fig. 5),
we can determine the co-ordinates of the
broadcasting station in question.
Figure 5: Triangulation of a known Target AP.
Secondly, NetArgus can be used for Mapping
and Tagging the Signal Level of all the Transmitting
Surrounding Stations in a given space (Fig.6), where
several stations are broadcasting. This can lead to an
optimization of the signal coverage through the
physical re-location of the APs towards an optimum
hexagon cell layout.
Figure 6: Empty space 802.11 signal coverage.
REFERENCES
G. E. Violettas, T. L. Theodorou, and C. K. Georgiadis.
(2009). “NetArgus: An SNMP Monitor & Wi-Fi
Positioning, 3-tier Application Suite”. La
Boca/Cannes, France: icwmc, pp. 346–351.
CISCO Systems. (2006) “Wi-Fi Based Real-Time
Location Tracking: Solutions and Technology”. C11-
346575-00, vol. White Paper.
AeroScout, “Technology Overview” Available: http://
www. aeroscout.com/content/technology.
Interlink Networks. (2002) Inc. “A Practical Approach to
Identifying and Tracking Unauthorized 802.11
Cardsand Access Points”.
P. Bahl, V. N. Padmanabhan, and A. Balachandran. .
(2000) “A software system for locating mobile users:
Design, evaluation, and lessons”. online document,
Microsoft Research, February.
A. Seppänen, J. Ikonen, and J. Porras. (2003) “Extracting
And Using Position Information In Wlan Networks”.
WAWC'03.
A. Kotanen, M. Hannikainen, H. Leppakoski, and T.D.
Hamalainen. (2003) “Positioning with IEEE 802.11 b
wireless LAN”. 14th IEEE Proceedings on Personal,
Indoor and Mobile Radio Communications, 2003.
PIMRC 2003, vol. 3.
R. F. Stengel. (1994) Optimal Control and Estimation.
New York, NY: Dover Publications.
A. C. Harvey. (1990) Forecasting, Structural Time Series
Models and the Kalman Filter. Cambridge: Cambridge
University Press.
R. E. Kalman. (1960) “A new approach to linear filtering
and prediction problems”. Journal of basic
Engineering, vol. 82, pp. 35–45.
G. Welch and G. Bishop. (1995) “An introduction to the
Kalman filter”. University of North Carolina at
Chapel Hill, Chapel Hill, NC.
P. A. Ruymgaart. (1988) Mathematics of Kalman-Bucy
Filtering, Berlin: Springer-Verlag.
Steven J. Vaughan-Nichols. (2009) “Augmented Reality:
No Longer a Novelty?” Computer, vol. 42, pp. 19-22.
WINSYS 2012 - International Conference on Wireless Information Networks and Systems
294
