
An Approach to Ontology-based Intention Recognition
using State Representations
Craig Schlenoff
1,2
, Sebti Foufou
2,3
and Stephen Balakirsky
1
1
Intelligent Systems Division, National Institute of Standards and Technology,
100 Bureau Drive, Gaithersburg, MD, U.S.A.
2
LE2i Lab, University of Burgundy, Dijon, France
3
Computer Science and Engineering, Qatar University, Doha, Qatar
Keywords: Intention Recognition, Human-Robot Interaction and Safety, State Representation, Ontology.
Abstract: In this paper, we present initial thoughts on an approach to ontology/logic-based intention recognition based
on the recognition, representation, and ordering of states. This is different than traditional approaches to
intention recognition, which use activity recognition and the ordering of activities. State recognition and
representation offer numerous advantages, including the ability to infer the intention of multiple people
working together and the fact that states are easier for a sensor system to recognize than actions. The focus
of this work is on the domain of manufacturing assembly, with an emphasis on human/robot collaboration
during the assembly process.
1 INTRODUCTION
Safe human-robot collaboration is widely seen as
key to the future of robotics. When humans and
robots can work together in the same space, a whole
class of tasks becomes amenable to automation,
ranging from collaborative assembly, to parts and
material handling and delivery. Keeping humans
safe requires the ability to monitor the work area and
ensure that automation equipment is aware of
potential danger soon enough to avoid it. Robots are
under development throughout the world that will
revolutionize manufacturing by allowing humans
and robots to operate in close proximity while
performing a variety of tasks (Szabo et al., 2011).
Proposed standards exist for robot-human safety,
but these standards focus on robots adjusting their
speed based on the separation distance between the
human and the robot (Chabrol, 1987). The
approaches focus on where the human is at a given
point in time. It does not focus on where they are
anticipated to be at points in the future.
A key enabler for human-robot safety involves
the field of intention recognition, which involves the
process of (the robot) understanding the intention of
an agent (the human(s)) by recognizing some or all
of their actions (Sadri, 2011) to help predict future
actions. Knowing these future actions will allow a
robot to plan its own actions in such a way as to
either help the human perform his/her activities or,
at a minimum, not put itself in a position to cause an
unsafe situation.
In this paper, we present an approach for
ontology-based intention recognition using state-
based information. In this context, state is defined as
a set of one or more objects in an area of interest that
consist of specific recognizable configuration(s) and
or characteristic(s). This is different than most
ontology-based approaches in the literature (as
described in Section 2) as they primarily focus on
activity (as opposed to state) recognition and then
use a form of abduction to provide explanations for
observations. In the approach presented in this
paper, state information serves as the focus of the
observations, which provides many advantages over
the representation of activities. One such advantage
is the ability to handle more than one single
observed agent, which is a significant limitation of
current approaches (Sadri, 2011). This paper focuses
on the knowledge requirements necessary to
represent state information for ontology-based
intention recognition.
Section 2 describes the state of the art in
ontology/logic-based intention recognition. Section
3 provides an example of the initial domain of
interest, namely, industrial assembly operations.
178
Schlenoff C., Foufou S. and Balakirsky S..
An Approach to Ontology-based Intention Recognition using State Representations.
DOI: 10.5220/0004111701780183
In Proceedings of the International Conference on Knowledge Engineering and Ontology Development (KEOD-2012), pages 178-183
ISBN: 978-989-8565-30-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Section 4 describes the newly-formed IEEE
Ontologies for Robotics and Automation (ORA)
Working Group and describes some information
requirements necessary to represent state-based
intention recognition, including spatial relations,
ordering constraints, and associations with overall
intentions. Section 5 describes how this information
can be put together to perform intention recognition.
Section 6 concludes the paper.
2 ONTOLOGY/LOGIC-BASED
INTENTION RECOGNITION
As mentioned in the introduction, intention
recognition traditionally involves recognizing the
intent of an agent by analysing the actions that the
agent performs. Many of the recognition efforts in
the literature are composed of at least three
components: (1) identification and representation of
a set of intentions that are relevant to the domain of
interest, (2) representation of a set of actions that are
expected to be performed in the domain of interest
and the association of these actions with the
intentions, (3) recognition of a sequence of observed
actions executed by the agent and matching them to
the actions in the knowledge base.
There have been many techniques applied to
intention recognition that follow the three steps
listed above, including ontology-based approaches
(Jeon et al., 2008) and probabilistic frameworks such
as Hidden Markov Models (Kelley et al., 2008) and
Dynamic Bayesian Networks (Schrempf and
Hanebeck, 2005). In this paper, we focus on
ontology-based approaches.
In many of these efforts, abduction has been used
as the underlying reasoning mechanism in providing
hypotheses about intentions. In abduction, the
system “guesses” that a certain intention could be
true based on the existence of a series of observed
actions. For example, one could guess that it must
have rained if the lawn is wet, though the sprinkler
could have been on as well. As more information is
learned, probabilities of certain intentions are refined
to be consistent with the observations.
One of the key challenges in intention
recognition is pruning the space of hypotheses. In a
given domain, there could be many possible
intentions. Based on the observed actions, various
techniques have been used to eliminate improbable
intentions and assign appropriate probabilities to
intentions that are consistent with the actions
performed. Some have assigning weights to
conditions of the rules used for intention recognition
as a function of the likelihood that those conditions
are true (Pereira and Ahn, 2009).
There has also been a large amount of research in
the Belief-Desire-Intention (BDI) community (Rao
and Georgeff, 1991). However, this work focuses on
the intention of the intelligent agent (as opposed to
the human it is observing) and the belief structure is
often based on the observation of activities as
opposed to inferring the intention of the human via
state recognition.
Once observations of actions have been made,
different approaches exist to match those
observations to an overall intention or goal. (Jarvis
et al., 2005) focused on building plans with
frequency information to represent how often an
activity occurs. The rationale behind this approach is
that there are some activities that occur very
frequently and are often not relevant to the
recognition process (e.g., a person cleaning their
hands). When these activities occur, they can be
mostly ignored. In (Demolombe et al., 2006), the
authors combine probabilities and situation calculus-
like formalization of actions. In particular, they not
only define the actions and sequences of actions that
constitute an intention, they also state which
activities cannot occur for the intention to be valid.
All of these approaches have focused on the
activity being performed as being the primary basis
for observation and the building block for intention
recognition. However, as noted in (Sadri, 2011),
activity recognition is a very hard problem and far
from being solved. There has only been limited
success in using RFID (Radio Frequency
Identification) readers and tags attached to objects of
interest to track their movement with the goal of
associating their movement with known activities, as
in (Philipose et al., 2005).
Throughout the rest of this paper, we will
describe an approach to intention recognition that
uses state information as opposed to activity
information to help address some of the challenges
described in this section.
3 INDUSTRIAL ASSEMBLY
EXAMPLE
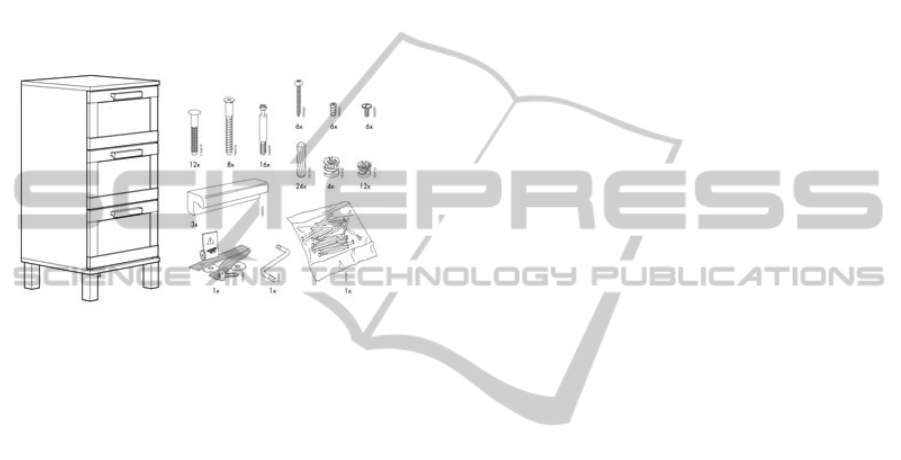
Imagine a situation where a person and a robot are
working together to assemble furniture. There are
different types of furniture that needs to be
assembled, and many of the pieces of furniture use
the same set of interchangeable parts.
In this example, we will focus on two cabinets,
as shown in Figure 1 and Figure 2. The cabinets and
AnApproachtoOntology-basedIntentionRecognitionusingStateRepresentations
179
their subsequent assemblies were taken from the
assembly instructions on the IKEA web site (http://w
ww.ikea.com/ms/en_US/customer_service/assembly
_instructions.html). Ten of each cabinet needs to be
assembled by the end of the shift. The order in
which the assembly happens is up to the human. He
may choose to do all of the cabinet 1s first, all of the
cabinet 2s first, or intermingle the two.
The robot’s goal is to see which assembly the
human is trying to accomplish, and then take steps to
facilitate that assembly, whether it be handing the
human parts or orienting the subassembly to make it
easier for the human to complete his task.
Figure 1: Picture of cabinet 1 with some associated parts.
Not knowing which assembly the human is
performing at any given time, the robot will observe
the sequence of states that occur over time and
associate those states with the overall intention of
which cabinet is being created. Because many of the
parts are common between the two cabinets, simply
seeing which part the human picks up is not
sufficient. The robot also needs to observe which
other parts are used in the assembly and how those
parts are attached together.
In the approach described in this paper, the robot
will observe the series of states that are the results of
various actions and infer the intent of the human by
matching the sequence of states to an ontology of
intentions with associated state orderings.
Next, we will describe an overall effort that is
creating an ontology for robotics and automation and
then describe how we are extending this ontology to
capture state information.
4 A MANUFACTURING ROBOT
ONTOLOGY
4.1 IEEE Ontologies for Robotics and
Automation Working Group
In late 2011, IEEE formed a working group entitled
Ontologies for Robotics and Automation (ORA)
(Schlenoff et al., 2012). The goal of the working
group is to develop a standard ontology and
associated methodology for knowledge
representation and reasoning in robotics and
automation, together with the representation of
concepts in an initial set of application domains. The
working group understood that it would be
extremely difficult to develop an ontology that could
cover the entire space of robotics and automation.
As such, the working group is structured in such a
way as to take a bottom-up and top-down approach
to addressing this broad domain. This group is
comprised of four sub-groups entitled: Upper
Ontology/Methodology (UpOM), Autonomous
Robots (AuR), Service Robots (SeR), and In-
dustrial Robots (InR). The InR, AuR and SeR sub-
groups are producing sub-domain ontologies that
will serve as a test case to validate the upper
ontology and the methodology developed by UpOM.
The industrial robots group is focusing on
manufacturing kitting operations as a test case,
which is extremely similar in concept to
manufacturing assembly operations. This kitting
ontology is focusing on activities that are expected
to be performed in a sample kitting operation along
with pertinent objects that are expected to be
present.
4.2 Expanding the Ontology to Include
State Information
The current version of the IEEE Industrial Robots
Ontology contains minimal information about states.
Initial efforts will look to expand the information
that is already represented to include more detailed
state information.
A comprehensive literature review was
performed in (Bateman and Farrar, 2006) which
explored the way that spatial information was
represented in a number of upper ontology efforts,
including Standard Upper Merged Ontology
(SUMO), OpenCyc, DOLCE (A Descriptive
Ontology for Linguistic and Cognitive Engineering),
and Basic Formal Ontology (BFO). The general
findings of the study concluded that, in order to
specify the location of an entity, the following four
items are needed:
1. A selection of an appropriate granular
partition of the world that picks out the
entity that we wish to locate
2. A selection of an appropriate space region
formalization that brings out or makes
available relevant spatial relationships
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
180

3. A selection of an appropriate partition over
the space region (e.g., RCC8, qualitative
distance, cardinal direction, etc.)
4. The location of the entity with respect to
the selected space region description.
Item #1 World partition is provided in many
manufacturing assembly applications via a parts list.
Additional environmental information may be
necessary as well.
Item #2 Space region formalization is important
in manufacturing assembly, among other reasons, in
that it provides a point of reference. When
describing spatial relations such as to_the_right_of,
it provides a point of reference such that all
observers are interpreting the relation similarly.
Item #3 (partition of the space region) is perhaps
one of the most important items to represent in the
ontology as it pertains to manufacturing assembly.
This is because an assembly operation is based on
the ability to combine pieces together to form an
overall structure. The location of each piece,
whether on a table or attached to other pieces, is key
to determining what actions a person has performed
and what actions they are likely and able to be
performed next.
Item #4 (absolute location of objects) is perhaps
the least important of the four items because the
absolute location of objects is often not essential for
intention recognition. Note that for controlling
robots, the absolute location of objects is extremely
important, but that is not the focus of this paper.
4.3 Identifying and Ordering of States
to Infer Intention
In just about any domain, there are an extremely
large number of states that can occur. However,
most of those states are not relevant to determine
what activity is occurring. By pre-defining (in the
ontology) the activities that are relevant and of
interest in the domain, one can then infer the states
that are associated with these activities and train the
sensor system to only track and report when those
states exist in the environment.
States can be ordered in a similar way as
activities to create an overall plan (and therefore an
overall intention). In fact, some of the same types of
constructs that are used for activities can also be
used for states. OWL-S (Web Ontology Language –
Services) (Martin et al., 2004) is one example of an
ontology for describing semantic web services.
OWL-S contains a number of constructs for not only
representing activities but also for specifying the
ordering processes. Some of these ordering
constructs (as applied to states) include:
Sequences – a set of states that must occur in a
specific order
Choice – a set of possible states that can occur
after a given state
Join – two or more states that must be true at
the same time for a subsequent state to be
possible.
Count – a state that needs to be present
multiple times. One example of this could be
having multiple screws inserted to attach two
parts together. Note that this is similar to the
iterate construct for processes.
Any-Order – a set of states that must all occur
but may occur in any order
All of the constructs that are stated in OWL-S
are relevant to states apart from those that deal with
concurrency. In this work, states are different than
activities in that they are true or false at a given
instance of time. Activities occur for a duration,
which can cause them to have concurrency
constraints, such as starting at the same time (as
represented by the OWL-S Split Construct) and/or
having to complete at the same time (as represented
by the OWL-S Split+Join construct).
An intention is represented as an ordering of
states. At the highest level, the overall intention
could be to build a specific type of cabinet. This
intention can be made up of sub-intentions which
could be to build the frame, build the drawers, etc.
Each of these sub-intentions would have its own
ordering of states which would be a subset of overall
intention.
5 APPLYING THE APPROACH
TO THE CABINETS EXAMPLE
For the remainder of this paper, we will simplify the
assembly operation by using two types of spatial
relationship, namely:
attached(x,y,z) (1)
which intuitively means that part x and part y are
attached together by part z, where part z could be a
screw, nail, or any other securing mechanism, and
partially-within(x,y) (2)
which intuitively means that an aspect of part x is
within part y.
The first step in both cabinet assembly
operations is placing a wooden peg into each of four
legs, as shown in Figure 3.
AnApproachtoOntology-basedIntentionRecognitionusingStateRepresentations
181
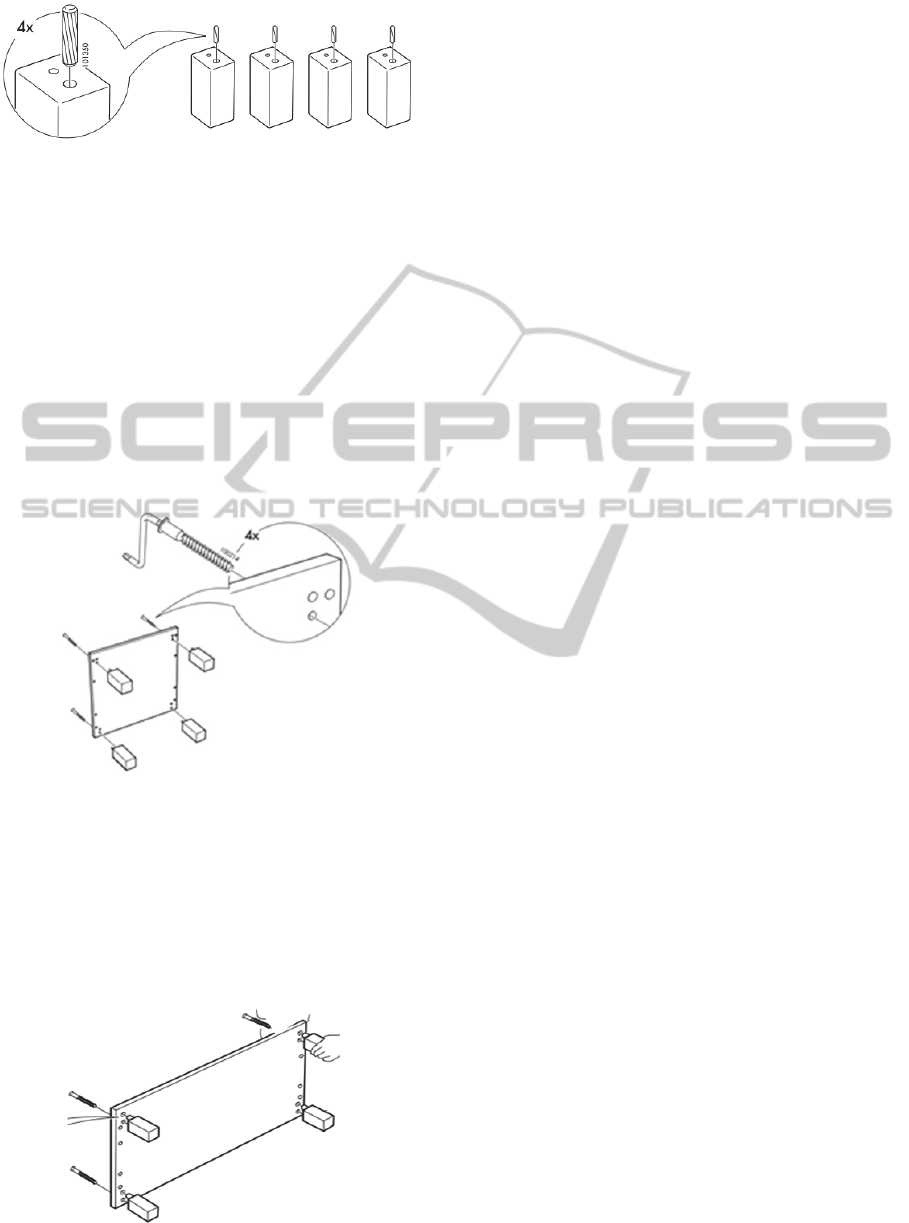
Figure 3: Step 1 of both assembly operations.
The state would be represented by:
partially-within(wooden_peg, leg) (3)
and the sequence would be:
count(partially-within(wooden_peg, leg),4) (4)
which indicates that there must be four instances of
the state of the wooden peg within a leg. Because
this series of states is true for both assemblies, more
information is needed for the robot to infer which
cabinet the human is assembling.
The second state of the assembly for the small
cabinet in Figure 1 is shown in Figure 4.
Figure 4: Step 2 of the small cabinet assembly.
In this case, the small base is attached to the legs
via screw14. Because this has to be performed four
times, this would be represented by:
count(attached(leg,small_base,screw14),4) (5)
The second state of the assembly for the larger
cabinet in Figure 2 is shown in Figure 5.
Figure 5: Step 2 of the larger cabinet assembly.
In this case, the large base is attached to the legs
via screw14. Because this has to be performed four
times, this would be represented by:
count(attached(leg,large_base,screw14),4) (6)
The overall sequence for cabinet 1 and 2
(respectively) up to the point would be:
sequence(
count(partially_within(wooden_peg, leg),4),
count(attached(leg,small_base,screw14),4))
(7)
sequence(
count(partially_within(wooden_peg, leg),4),
count(attached(leg,large_base,screw14),4))
(8)
The type of formalisms shown in (7) and (8) would
serve as the basis for the state ordering specification
that would be represented in the ontology. Spatial
relations such as attached() and partially-within()
(such as in equation (2)) would be represented as
subclasses of the general spatial_relation class.
Specific occurrences of the state (such as in equation
(3)) would be represented by instances of
appropriate class. Sequence information would be
represented as in OWL-S, by overall
ControlContruct class, containing subclasses of the
appropriate sequence constructs (e.g., count,
sequence). As a robot makes observations about the
state of the environment, these observations would
be compared to the ontology to find possible state
matches. Constraints on state ordering in the
ontology will guide the robot’s sensor system to
areas that should contain the logical next states.
With this state information, a robot could track the
ordering of observed states over time and compare
that observed ordering to predefined state sequences
in the ontology to infer the intention of the human.
Though this example is simplistic, it does show
the formalism that one could use to represent a
sequence of states as a mechanism to perform
intention recognition based on state ordering.
6 CONCLUSIONS
In this paper, we present initial thoughts on a form
of intention recognition that is based on states as
opposed to actions. State-based intention recognition
offers some interesting advantages of activity-based
recognition, including:
States are often more easily recognizable
by sensor systems than actions.
Using activities, intention recognition is
often limited to inferring the intention of
a single person. State-based intention
KEOD2012-InternationalConferenceonKnowledgeEngineeringandOntologyDevelopment
182

recognition eliminates this shortfall, in that
the state is independent of who created it.
State information is often more ubiquitous
than activity information, thus allowing for
reusability of the ontology.
Because of the similarity of state representation
with activity representation, many of the same
approaches that were described in Section 2 can be
applied to this approach as well. Future work will
explore explicitly representing which states cannot
occur for a subsequent state to be possible as in
(Demolombe et al., 2006) and assigning
probabilities to various states similar to (Kelley et
al., 2008).
REFERENCES
Bateman, J. and S. Farrar (2006). Spatial Ontology
Baseline Version 2.0. OntoSpace Project Report -
Spatial Cognition SFB/TR 8: I1 - [OntoSpace],
University of Bremen.
Chabrol, J. (1987). "Industrial robot standardization at
ISO." Robotics 3(2).
Demolombe, R., A. Mara, et al. (2006). Intention
recognition in the situation calculus and probability
theory frameworks. Computational Logic in Mulit-
Agent Systems (CLIMA) Conference: 358-372.
Jarvis, P. A., T. F. Lunt, et al. (2005). "Identifying terrorist
activity with AI plan-recognition technology." AI
Magazine 26(3): 9.
Jeon, H., T. Kim, et al. (2008). Ontology-based User
Intention Recognition for Proactive Planning of
Intelligent Robot Behavior. International Conference
on Multimedia and Ubiquitous Engineering Busan,
Korea: 244-248.
Kelley, R., A. Tavakkoli, et al. (2008). Understanding
Human Intentions Via Hidden Markov Models in
Autonomous Mobile Robots. 3rd ACM/IEEE
International Conference on Human Robot Interaction
Amsterdam: 367-374.
Martin, D., M. Burstein, et al. (2004). "OWL-S: Semantic
Markup of Web Services." from http://www.w3.org/
Submission/OWL-S/.
Pereira, L. M. and H. T. Ahn (2009). Elder care via
intention recognition and evolution prospection. 18th
International Conference on Applications of
Declarative Programming and Knowledge
Management (INAP'09). Evora, Portugal.
Philipose, M., K. Fishkin, et al. (2005). "Inferring ADLs
from interactions with objects." IEEE Pervasive
Computing.
Rao, A. S. and M. P. Georgeff (1991). Modeling rational
agents within a BDI-architecture. Second International
Conference on Principles of Knowledge
Representation and Reasoning. J. Allen, R. Fikes and
E. Sandewall. San Mateo, CA.
Sadri, F. (2011). Logic-Based Approaches to Intention
Recognition. Handbook of Research on Ambient
Intelligence and Smart Environments: Trends and
Perspectives. N.-Y. Chong and F. Mastrogiovanni:
346-375.
Schlenoff, C., E. Prestes, et al. (2012). An IEEE Standard
Ontology for Robotics and Automation. to be
published in Bridges Between the Methodological and
Practical Work of the Robotics and Cognitive Systems
Communities - From Sensors to Concepts. A. Chibani,
Springer-Verlag.
Schrempf, O. and U. Hanebeck (2005). A Generic Model
for Estimating User-Intentions in Human-Robot
Cooperation. 2nd International Conference on
Informatics in Control, Automation, and Robotics
ICINCO 05 Barcelona: 250-256.
Szabo, S., R. Norcross, et al. (2011). "Safety of Human-
Robot Collaboration Systems Project." from http://
www.nist.gov/el/isd/ps/safhumrobcollsys.cfm.
AnApproachtoOntology-basedIntentionRecognitionusingStateRepresentations
183
