
Flexibility in Organic Systems
Remarks on Mechanisms for Adapting System Goals at Runtime
Christian Becker
1
, J
¨
org H
¨
ahner
2
and Sven Tomforde
2
1
System and Computer Architecture Group, Leibniz University Hannover, Appelstr. 4, 30167 Hannover, Germany
2
Lehrstuhl f
¨
ur Organic Computing, Augsburg University, Eichleitnerstr. 30, 86159 Augsburg, Germany
Keywords:
Organic Computing, Flexibility, Machine Learning, Goal Exchange, Network Protocol Configuration.
Abstract:
Within the last decade, technical systems that are capable of self-adaptation at runtime emerged as challenging
approach to cope with the increasing complexity and interconnectedness in today’s development and manage-
ment processes. One major aspect of these systems is their ability to learn appropriate responses for all kinds
of possibly occurring situations. Learning requires a goal function given by the user – which is subject to
modifications at runtime. In order to allow for flexible manipulations of goals within the system’s operation
period, the learning component must be able to keep knowledge in order to respond to varying goals quickly.
This paper describes attempts to implementing flexible learning in rule-based systems. First results show that
efficient approaches are possible even in real-world applications.
1 INTRODUCTION
In recent years, technical systems capable of adapt-
ing themselves to changing environmental condi-
tions have gained increasing attention in industry and
academia. Driven by the insight that current design
approaches and the corresponding systems reach their
limits, a new paradigm for design processes has been
proposed. The main concept of this paradigm pos-
tulates to move parts of the control authority (e.g.
for configuration aspects or the decision about most-
promising responses) from design time to runtime.
Hence, systems themselves become responsible for
finding appropriate reactions for occurring situations,
although these situations have not been anticipated by
an engineer in the first place, cf. initiatives like Au-
tonomic (AC, (Kephart and Chess, 2003)) or Organic
Computing (OC, (Schmeck, 2005b)). Typically, this
increasing degree of autonomy is achieved by intro-
ducing self-* properties (Schmeck, 2005a) and by en-
abling automated learning capabilities – which results
in an increased adaptivity and a higher robustness of
the system compared to standard solutions.
In previous work (Tomforde, 2012), we intro-
duced a basic system design and framework to
achieve these desired organic capabilities. The ap-
proach is based on using population-based machine
learning techniques that limit the trial-and-error parts
of automated learning and thereby match safety-
restrictions of real-world systems. Usually, machine
learning systems are configured at design time by pro-
viding a certain goal (e.g. by applying a mathematical
function) which is to be approximated over time. Up-
coming OC systems face the demand of providing a
possibility to modify such goals at runtime as reac-
tion to changing user needs. We refer to this concept
as flexibility, cf. (Schmeck et al., 2010).
Rule-based learning typically keeps track of a per-
formance estimation for each rule – the fitness. This
fitness is calculated and updated in response to ob-
served system behaviour and depends on the given
goal. After defining the term flexibility (section 2),
this paper discusses the need of novel mechanisms
for flexibility in rule-based machine learning tech-
niques and introduces three different concepts (sec-
tion 3). Afterwards, these concepts are evaluated
within an exemplary application from the OC domain
(section 4). Section 5 summarised the paper and gives
an outlook to future work.
2 TERM DEFINITION:
FLEXIBILITY
Similar to various terms used in the context of self-
organised and organic systems, flexibility has mani-
fold meanings in different research domains. Corre-
287
Becker C., Hähner J. and Tomforde S..
Flexibility in Organic Systems - Remarks on Mechanisms for Adapting System Goals at Runtime.
DOI: 10.5220/0004121002870292
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 287-292
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
spondingly, it is measured according to the aspects
that are specific to the particular (application) domain.
For instance, various metrics are proposed to mea-
sure the flexibility of manufacturing systems (Ben-
jaafar and Ramakrishnan, 1996; Hassanzadeh and
Maier-Speredelozzi, 2007; Shuiabi et al., 2005), pro-
gramming paradigms, architecture styles, and design
patterns (Eden and Mens, 2006) or different recon-
figurable hardware architectures (Compton, 2004).
There is no common definition, but the meaning of
the term as “adapting the system appropriately when
the goal is changed” is commonly agreed.
At a technical perspective and in the context of
OC, we typically rely on using Observer/Controller
patterns as basic system design (Schmeck, 2005b).
The most prominent variant is the Multi-level Ob-
server/Controller (MLOC) framework (Tomforde,
2012) which relies on using Learning Classifier Sys-
tems (LCS) for online learning tasks. Even when ini-
tially testing LCS’ in artificial scenarios like the an-
imat exploring its environment (i.e. the Woods sce-
nario (Wilson, 1994)), the possibility of different
kinds of targets (here: artificial food) is already en-
visioned. In the context of this paper we will rely on
the OC terminology which was initially explained in
(Schmeck et al., 2010). Thereby, two concepts are
distinguished:
1. A system is characterised by its state z(t). If z(t)
changes due to a change of the system (e.g. bro-
ken components) or a change in the environmental
conditions (disturbance δ) and the system contin-
ues to show an acceptable behaviour, this system
is called a robust system.
2. In case of changes of the evaluation and accep-
tance criteria, the system’s state spaces that de-
fine the targeted and accepted behaviour would be
modified. A system that is able to cope with such
changes in its behavioural specification is called a
flexible system.
The first aspect is needed for most systems and
especially focused by diverse initiatives and research
domains like OC, AC, or Proactive Computing (Ten-
nenhouse, 2000). In contrast, the second aspect is
mostly left unregarded.
3 ORGANIC SYSTEMS AND
FLEXIBILITY
This section discusses the basic system design for
organic systems according to the Multi-level Ob-
server/Controller (MLOC) framework. Based on
this framework and the goal-related tasks within this
framework, we discuss technical issues and the corre-
sponding research problem for achieving flexibility.
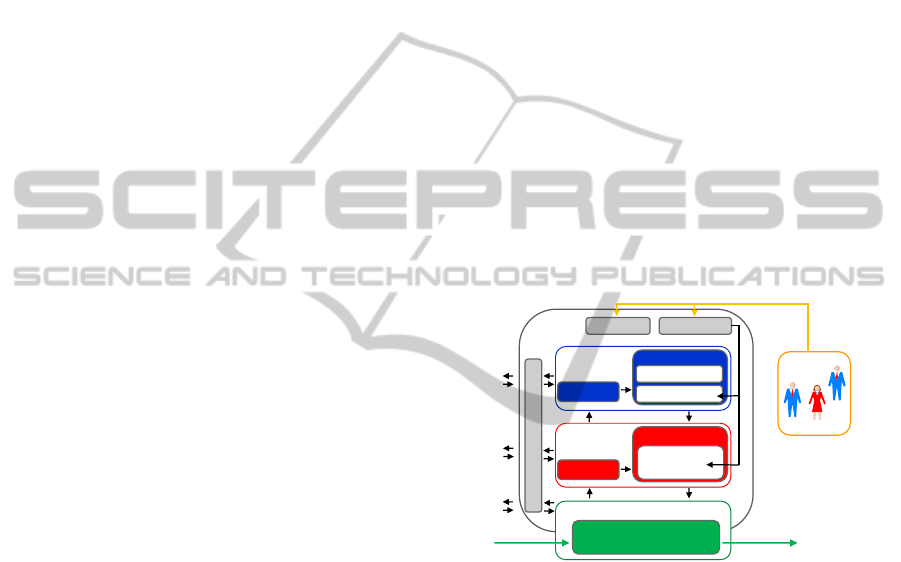
3.1 System Design
The MLOC framework for learning and self-
optimising systems as depicted in Figure 1 – first in-
troduced in (Tomforde, 2012) – provides a unified
approach to automatically adapt technical systems
to changing environments, to learn the best adap-
tation strategy, and to explore new behaviours au-
tonomously. Figure 1 illustrates the encapsulation
of different tasks by separate layers. Layer 0 en-
capsulates the system’s productive logic (the System
under Observation and Control – SuOC). Layer 1
establishes a control loop with safety-based on-line
learning capabilities, while Layer 2 evolves the most-
promising reactions to previously unknown situa-
tions. In addition, Layer 3 provides interfaces to the
user and to neighbouring systems. Details on the
design approach, technical applications, and related
concepts can be found in (Tomforde, 2012).
Layer 3
Layer 0
Detector
data
Control
signals
User
System under Observation
and Control
Layer 1
Parameter selection
Observer
Controller
modified XCS
Layer 2
Offline learning
Observer
Controller
Simulator
EA
Collaboration mechanisms
Monitoring Goal Mgmt.
Figure 1: System Design.
In the context of this paper, we confine our regard
to those components that have to cover changes in the
user’s goals at runtime – in particular at Layer 1 and
Layer 2 of the architecture. At Layer 1 a modified
LCS serves as controller within the regulatory control
loop: it is responsible for adapting the SuOC’s pa-
rameter configuration according to observed changes
in the environmental conditions. Due to safety-
restrictions in real-world systems, a standard LCS is
not applicable to the learning problem as it would op-
erate with too much freedom and relies strongly on
trial-and-error. Therefore, we modified the eXtended
Classifier System (XCS) (Wilson, 1995) by remov-
ing the rule-generation parts and restricted the set of
possibly selectable rules. Details on these modifica-
tions are given in (Tomforde, 2012) – they don’t in-
fluence the powerfulness and operability of the XCS
algorithm. For understanding the technical impact of
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
288

allowing the user to change the overall system goal
at runtime, it is important to know that an XCS (and
so the modified variant) stores its knowledge and ex-
periences as rules in form of a basic 5-tuple. This
tuple contains the attributes condition (in which sit-
uation is the rule applicable?), action (what to do if
the rule is chosen?), prediction (what reward is ex-
pected if the rule is chosen?), error (how reliable is
the prediction?), and fitness (what is the quality of the
rule?). Learning in an XCS is realised by modifying
the last three attributes using temporal difference al-
gorithms according to an observed reward – which de-
termines how well the user’s goals have been achieved
within the last evaluation cycle (typically referred to
as receiving a reward). If the user changes the goals
and thereby the reward function at runtime, the ex-
periences and knowledge stored within these evalua-
tion attributes don’t reflect the correct reward function
anymore. Hence, the XCS has to be further adapted in
order to allow for keeping its learning behaviour and
knowledge while simultaneously enabling an optimi-
sation process towards the new system goal. The dif-
ferent possibilities to deal with this problem are dis-
cussed in section 3.2.
While Layer 1 is responsible for learning online
from the observed system performance, Layer 2 re-
alises the OC concept of moving the trial-and-error
parts of learning to a sandbox. Similar to approaches
like Anytime Learning (Grefenstette and Ramsey,
1992), a simulation-coupled optimisation heuristic
evolves new rules in case of insufficient knowledge at
Layer 1 and adds these novel rules to the rule-base of
the XCS. Again, this exploration of novel behaviour
in terms of rules needs a definition of good and bad
system performance – the user’s goals. First attempts
to deal with the related flexibility problem are dis-
cussed in section 3.3.
3.2 Flexibility at Layer 1
Since Layer 1 of the architecture is concerned with
automatically improving the selection strategy over
time, its controller component is implemented us-
ing machine learning techniques – a modified XCS
in case of the MLOC framework. Each machine
learning technique uses a reward or fitness function
f : K → [0, 1] to determine the strength of the used
parameter setting K ∈ K. Generalised versions with
f : K → B can also be found in literature. Since it
should be possible for the user to switch the system
goal at runtime, we need to extend the XCS to hold
a family of fitness functions f
α
. The user is now ca-
pable of switching the system’s goal by changing α.
Starting from the simplest concept of “blowing up”
the existing concept, we investigated three different
approaches with increasing complexity to realise flex-
ibility at Layer 1:
• Selective Approach. We extend the XCS to hold
multiple populations – one disjoint set for each
goal function. The XCS uses the population for
the currently set goal function and switches over
to another population when the user changes the
goal function of the OC system.
• Multi-dimensional Approach. Extend each clas-
sifier of the XCS to hold an array of 5-tuples –
one dimension for each goal function. The XCS
selects the 5-tuple according to the α of the cur-
rently set fitness function. The difference to the
previous approach relies on which rules are stored
and the direct feedback for the evaluation criteria
even if another α is chosen.
• Cumulative Approach. Accumulate all goal
functions to a new one and use this new goal func-
tion to update the 5-tuple of the XCS.
We’ve chosen the following function f
Cumulative
for accumulating the different goal functions
f
Cumulative
(K) = E [ f
α
(K)]
−
max
α
{
f
α
(K)
}
− min
α
{
f
α
(K)
}
since a maximisation of this function results in a
minimisation of the difference between the maxi-
mum and the minimum while maximising the first
moment. Consequently, all considered values are
in a small corridor around the first moment.
3.3 Flexibility at Layer 2
In order to investigate flexibility at Layer 2, we anal-
ysed three different approaches to modify the existing
optimisation heuristic to be flexible in terms of OC:
• Multi-criterial Approach. Use a standard
Multi-criterial optimisation algorithm like the
S -Metric Selection Evolutionary Multi-Objective
Algorithm (SMS-EMOA) (Naujoks and Beume,
2005) and add the resulting set of rules to the pop-
ulation.
• Selective Approach. Minimise the amount of
evaluation calls and start optimisations for each
goal function with these minimised evaluation
calls.
• Cumulative Approach. Accumulate all goal
functions to a new one and optimise that new goal
function. We have chosen the same cumulative
function f
Cumulative
(K) as in Layer 1 (see 3.2).
FlexibilityinOrganicSystems-RemarksonMechanismsforAdaptingSystemGoalsatRuntime
289

Table 1: Variable parameters of the R-BCast protocol.
Parameter Standard configuration
Delay 0.1 s
AllowedHelloLoss 3 messages
HelloInterval 2.0 s
δHelloInterval 0.5 s
Packet count 30 messages
Minimum difference 0.7 s
NACK timeout 0.2 s
NACK retries 3 retries
In contrast to the approach at Layer 1 of the archi-
tecture, the basic flexibility concepts at Layer 2 can
be implemented using standard techniques in the first
step. Therefore, the focus of this paper is confined to
the Layer 1 aspects.
4 EVALUATION
The following section discusses the experimental in-
vestigation of the different flexibility concepts for
Layer 1. The content is based on initial work as pub-
lished in (Becker, 2011).
4.1 Example Application
The basic design approach as presented in section 3.1
has been applied to various application scenarios,
including vehicular traffic control, production, and
mainframe systems (Tomforde, 2012). In the con-
text of this paper, we turn our attention to the Organic
Network Control (ONC) (Tomforde et al., 2011) sys-
tem as example application. ONC has been developed
to dynamically adapt parameters of data communica-
tion protocols (i.e. buffer sizes, delays, or counters)
in response to changing environmental conditions. It
learns the best mapping between an observed descrip-
tion of the environment and the most promising re-
sponse in terms of a parameter configuration.
Especially when applying ONC to broadcast al-
gorithms in mobile ad-hoc networks (MANET), we
demonstrated the significant benefit of the additional
ONC control. For instance, when applying ONC to
the R-BCast protocol (Kunz, 2003) ONC increased
the algorithm’s reliability and decreased the arising
overhead. Within this paper, we reuse the implemen-
tation of ONC controlling this R-BCast protocol to
demonstrate different flexibility strategies. Table 1
lists the variable parameters of R-BCast and thereby
defines the configuration space K. Details about the
parameters’ functionality and impact on the proto-
col’s logic as well as an explanation of the algorithm
can be found in (Kunz, 2003).
The online learning system relies on a situation
description as conditional part of each rule. In this
scenario, the distribution of other nodes in the direct
neighbourhood according to a sector-based model as
depicted in figure 2 serves as condition part, while the
parameter configuration according to table 1 defines
the action part.
Figure 2: Environment representation.
4.2 Experimental Setup
We define the set of goal functions for the parameter
setting K ∈ K at the environment situation S by the
following family f
α,S
: K → [0, 1] with 0 < α < 1
f
α,S
(K) = α · f
PDR,S
(K) + (1 − α) · f
IOH,S
(K) (1)
where α is the weight for the sub goal functions
Packet-Delivery-Ratio (PDR) and Inverse-Overhead
(IOH). These goal functions comprise the most
prominent aspects when evaluating MANET-based
broadcast protocols – see e.g. (Williams and Camp,
2002) – and are defined as follows:
• Packet-Delivery-Ratio f
PDR,S
(K):
AgentReceived
MaxSentMessages · #Nodes · #Senders
• Inverse-Overhead f
IOH,S
(K):
AgentSent
MacSent
We use the inverse function of the Overhead since our
optimisation problem should maximise its function.
This structure of the goal functions allows to change
them at runtime by simply manipulating the weight
factor α. An important reason for the selection of
those sub goal functions is the fact that a maximisa-
tion of the PDR is assumed to result in a minimisation
of the IOH and vice versa. We therefore have contrary
oriented goal functions which also increases the learn-
ing problem’s complexity as a simple coupling is not
possible with contrary aspects.
The evaluation of the three different approaches
uses the settings as depicted in table 2 for the simu-
lation. The first eight hours rely on the goal function
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
290
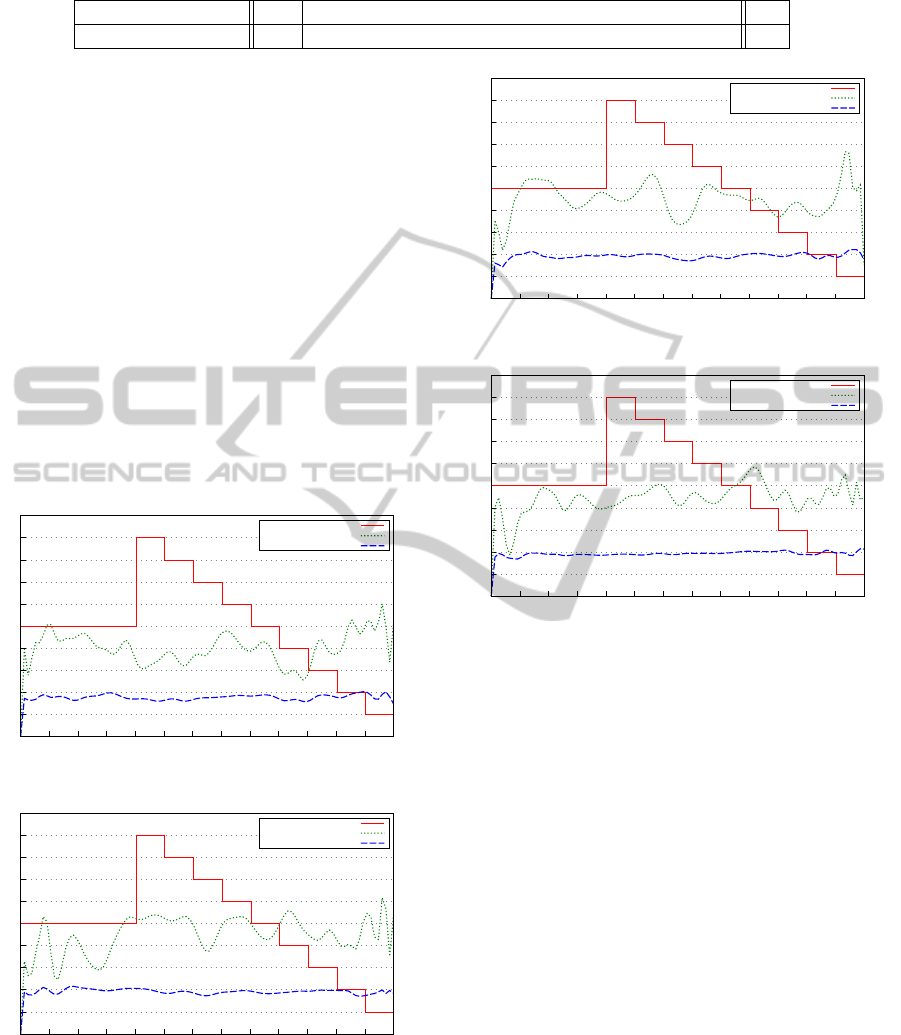
Table 2: Setting of the ONC simulation used for the evaluation.
Goal function by α 0.5 0.9 0.8 0.7 0.6 0.5 0.4 0.3 0.2 0.1 Σ
Duration in hours 8 2 2 2 2 2 2 2 2 2 26
f
0.5,S
to build up the XCS’ population and the corre-
sponding 5-tuples for each classifier. After this build-
up time the XCS uses time slots of two hours for the
goal functions starting with f
0.9,S
and a decreasing α.
We used this setting to let the XCS find a constant
population before changes in the goal function occur.
4.3 Results of the Evaluation
The figures 3 - 6 contain the evaluation results of the
simulation as explained in table 2 for the three differ-
ent approaches as presented in 3.2. They show the
Packet-Delivery-Ratio (green line) and the Inverse-
Overhead (blue line) in addition to the progress of
the weight factor α of the goal function f
α,S
(K) (red
line). Table 3 contains the averaged results. All ap-
proaches outperform the “ground-truth” of using the
protocol’s default values.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Alpha
Packet-Delivery-Ratio
Inverse-Overhead
Figure 3: Default values.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Alpha
Packet-Delivery-Ratio
Inverse-Overhead
Figure 4: Selective approach.
The cumulative approach performs worst com-
pared to the selective and the multi-dimensional ap-
proach. It was not possible to accumulate the contrary
character of the different goal functions to a mean-
ingful single value. Instead, the cumulative function
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Alpha
Packet-Delivery-Ratio
Inverse-Overhead
Figure 5: Multi-dimensional approach.
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0 2 4 6 8 10 12 14 16 18 20 22 24 26
Alpha
Packet-Delivery-Ratio
Inverse-Overhead
Figure 6: Cumulative approach.
f
Cumulative
results in a good rating of those classifiers
that a) perform better than the default values for all
goal functions but b) not optimal in any goal function.
The selective and multi-dimensional approaches
are similar in terms of the two goal functions. The
selective approach performs better for the Packet-
Delivery-Ratio while the multi-dimensional approach
results in a higher averaged value for the Inverse-
Overhead. In contrast, the averaged number of classi-
fiers needed to achieve this behaviour is different: the
multi-dimensional approach outperforms the selective
approach due to the disjunctive character of the latter
one’s population setup. In particular, the former ap-
proach does not rely on evolving a novel rule in each
occurring situation as it has broader knowledge from
other goal-aspects kept in the same population.
5 CONCLUSIONS
This paper discussed the need of novel mechanisms
to allow for flexibility in organic systems. We named
different approaches from various domains where the
FlexibilityinOrganicSystems-RemarksonMechanismsforAdaptingSystemGoalsatRuntime
291
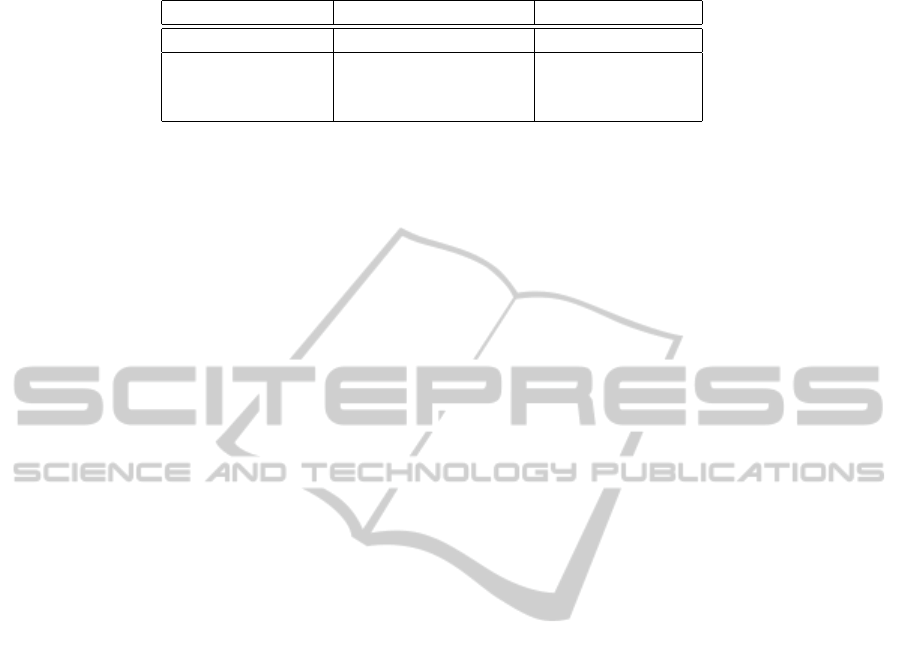
Table 3: Averaged rewards of the different approaches.
Approach Packet-Delivery-Ratio Inverse-Overhead
Default values 0.4006 0.1772
Selective 0.4509(+12.6%) 0.1923(+8.5%)
Multi-dimensional 0.4495(+12.2%) 0.1928(+8.8%)
Cumulative 0.4438(+10.8%) 0.1921(+8.4%)
term flexibility is used and defined what we want to
achieve in technical systems. Afterwards, we ex-
plained the need for novel techniques and mecha-
nisms to allow for a flexible system behaviour in case
of learning and organic systems. Therefore, the basic
Observer/Controller pattern and its technical imple-
mentation have been mentioned.
The evaluation part introduced three different ap-
proaches to achieve flexibility for the rule-based on-
line learning activities. According to the Organic
Network Control system as example application, we
compared the different concepts in a realistic envi-
ronment. Based on these first insights, we will con-
tinue to find solutions that keep the existing experi-
ence in case of changing goals and allow for an effi-
cient learning. The paper showed that flexibility is an
important issue and needs further research activities.
In upcoming OC systems, flexibility will gain in-
creasing attention. Therefore, future work will explic-
itly have to cope with related mechanisms and strate-
gies. One possibility to investigate the problem sepa-
rated from the limitations and noisy effects of realistic
applications is the previously mentioned animat sce-
nario (see section 2). This scenario will serve as one
example and basis for more abstract investigations of
the flexibility problem.
REFERENCES
Becker, C. (2011). Untersuchung von Mechanismen zur
technischen Umsetzbarkeit von Flexibilitaet in Organ-
ischen Systemen. Diploma thesis, Leibniz Universit
¨
at
Hannover.
Benjaafar, S. and Ramakrishnan, R. (1996). Modeling,
Measurement and Evaluation of Sequencing Flexibil-
ity in Manufacturing Systems. Int. J. of Production
Research, 34:1195 – 1220.
Compton, K. (2004). Flexibility Measurement of Domain-
Specific Reconfigurable. In ACM/SIGDA Symp. on
Field-Programmable Gate Arrays, pages 155 – 161.
Eden, A. H. and Mens, T. (2006). Measuring software flex-
ibility. IEE Proceedings - Software, 153(3):113–125.
Grefenstette, J. J. and Ramsey, C. L. (1992). An Approach
to Anytime Learning. In Proc. of the 9th Int. Workshop
on Machine Learning, pages 189–195.
Hassanzadeh, P. and Maier-Speredelozzi, V. (2007). Dy-
namic flexibility metrics for capability and capacity.
Int. J. of Flexible Manufacturing Systems, 19:195 –
216.
Kephart, J. O. and Chess, D. M. (2003). The Vision of
Autonomic Computing. IEEE Computer, 36(1):41–
50.
Kunz, T. (2003). Reliable Multicasting in MANETs. PhD
thesis, Carleton University.
Naujoks, B. and Beume, N. (2005). Multi-objective optimi-
sation using S-metric selection: Application to three-
dimensional solution spaces. In Proc. of CEC’05,
pages 1282 – 1289. IEEE.
Schmeck, H. (2005a). Organic Computing. K
¨
unstliche In-
telligenz, 3:68 – 69.
Schmeck, H. (2005b). Organic Computing – A new vision
for distributed embedded systems. In Proc. of the 8th
IEEE Int. Symp. on Object-Oriented Real-Time Dis-
tributed Computing, pages 201 – 203.
Schmeck, H., M
¨
uller-Schloer, C., C¸ akar, E., Mnif, M., and
Richter, U. (2010). Adaptivity and self-organization
in organic computing systems. ACM Transactions on
Autonomous and Adaptive Systems (TAAS), 5(3):1–32.
Shuiabi, E., Thomson, V., and Bhuiyan, N. (2005). Entropy
as a measure of operational flexibility. European Jour-
nal of Operational Research, 165(3):696 – 707.
Tennenhouse, D. (2000). Proactive computing. Communi-
cations of the ACM, 43(5):43–50.
Tomforde, S. (2012). Runtime adaptation of tech-
nical systems: An architectural framework for
self-configuration and self-improvement at runtime.
S
¨
udwestdeutscher Verlag f
¨
ur Hochschulschriften.
ISBN: 978-3838131337.
Tomforde, S., Hurling, B., and H
¨
ahner, J. (2011). Dis-
tributed Network Protocol Parameter Adaptation in
Mobile Ad-Hoc Networks. In Informatics in Control,
Automation and Robotics, volume 89 of LNEE, pages
91 – 104. Springer.
Williams, B. and Camp, T. (2002). Comparison of broad-
casting techniques for mobile ad hoc networks. In
Proc. of the 3rd ACM int. symp. on Mobile ad hoc net-
working & computing, pages 194–205. ACM.
Wilson, S. W. (1994). ZCS: A zeroth level classifier system.
Evolutionary Computation, 2(1):1–18.
Wilson, S. W. (1995). Classifier fitness based on accuracy.
Evolutionary Computation, 3(2):149–175.
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
292
