
A Joint Segmentation and Classification of Object Shapes with Feedback
for 3D Point Clouds
Frauke W
¨
ubbold and Bernardo Wagner
Institute of Systems Engineering, Real Time Systems Group, Leibniz Universit
¨
at Hannover,
Appelstraße 9A, D-30167 Hannover, Germany
Keywords:
Object Classification, Segmentation, Feedback, 3D Point Cloud, 3D Shape.
Abstract:
Limited knowledge and limited deduction abilities are among the main restraints of autonomous robots for
acting truly autonomously. This especially becomes obvious in the area of object recognition and classifi-
cation, where many methods rely on knowledge teached manually in a prior setup step. Self-generating this
knowledge from environment perception with a set of rules would significantly increase the robots autonomy
as well as supersede manual training effort. In this paper, we propose a novel approach to rule-based classifi-
cation for 3D point clouds by means of object shape, which additionally overcomes typical problems from a
separate prior segmentation by integrating classification feedback into the segmentation process. Although it
is still in its conceptual state, we explain in detail why we consider this approach to be very promising.
1 INTRODUCTION
Limited knowledge and the missing ability to detect
and deduce like humans do are the main restraints
for autonomous robots to act truely autonomously. In
consequence, each autonomous robot has been built
and trained for a set of specific tasks. This especially
becomes clear in the area of object detection, where
it is common practise to actively train an algorithm
for recognising a set of specified objects. The set is
chosen and trained manually and contains the objects
which are considered most important for the tasks the
robot is to fulfill. Traditionally, providing as well
as training the set is a time-consuming task. Widely
used training algorithms are Support Vector Machines
(Chen and Ellis, 2011) (Knopp et al., 2010). Over the
last years, increased efforts to improve classification
autonomy by reducing manual preparation and super-
vision have resulted in training sets largely consist-
ing of web data (Lai and Fox, 2009). They propose
a classification which is able to transfer object infor-
mation between different domains, e.g. with differ-
ent backgrounds or pictures taken with different cam-
eras, based on a small subset of object samples from
both domains. (Endres et al., 2009) eliminated the
training process by adapting unsupervised learning
techniques from information retrieval and proposed
a method which successfully and truly autonomously
classifies objects into a predefined, i.e. manually pre-
dicted, number of classes. The major drawback of
this approch it that initial knowledge of the number of
classes is required, which is impossible to provide for
a robot operating in an incompletely known environ-
ment. For a truly autonomous classification no pre-
requisite information should be necessary, because it
is diffucult to specify already in advance the objects to
be encountered or the number of classes to be seen. In
an ever-changing environment, where changes could
occur e.g. due to a human carrying an exemplar of
a new object class into the robot’s working area, it
is impossible to provide these information. Instead
we propose to use more general information like a
set of rules much less dependant on the environment.
Applying these rules to sensed environment data the
approach will be able to generate object class defini-
tions, to classify new objects and to permanently en-
hance existing class definitions by new classified ob-
jects.
Typically classification approaches require a pre-
vious segmentation of the sensor data into segments
corresponding to real-world objects. As a result they
are prone to incorporating segmentation errors with-
out providing methods for their detection and correc-
tion. Thus, the success of a classification is directly
linked to the quality of its preceding segmentation.
We believe that a joint segmentation and classification
scheme which feeds back classification results to the
segmentation process would solve this problem. Ac-
388
Wübbold F. and Wagner B..
A Joint Segmentation and Classification of Object Shapes with Feedback for 3D Point Clouds.
DOI: 10.5220/0004121703880393
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 388-393
ISBN: 978-989-8565-22-8
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
cording to our knowledge few work exist that fully or
partially incorporate this idea in the combined area of
object detection, recognition and classification, con-
sidering image-based approaches as well as those for
3D point clouds. Section 2 provides an overview of
related approaches and section 3 gives a detailed de-
scription of our concept. Future work is outlined in
section 4 and we offer our conclusions in section 5.
2 STATE OF THE ART
(Triebel et al., 2010) successfully integrate the gener-
ation of object hypotheses by means of segmentation
into their repetetive object detection. Starting with
the over-segmentation of a 3D point cloud into homo-
geneous surface parts, the authors take advantage of
multiple occurrences of a group of segments for de-
ducing the individual segments of which belong to a
real-world object. Thus, object detection is robust to
random and some perception-point specific segmenta-
tion faults. As the authors focus on detection of repet-
itive objects, single occurrences of a real-world object
are neglected.
A combined approach to image segmentation and
classification based on pattern recognition and using
shape models is introduced by (Lecumberry et al.,
2010). By fitting these models to images the com-
bined framework identifies the best matches between
an image region and a shape model, thus simultane-
ously conducting segmentation and classification. As
the shape models are obtained in an initial training
step, this approach requires a priori object knowledge
and classification is restricted to the trained classes
only.
(Farmer and Jain, 2004) propose an approach to-
wards closed-loop segmentation and classification for
images. After an initial background removal step the
authors suggest to apply multiple segmentations each
time using a different feature. For each segmenta-
tion groups of segments are classified according to
the most probable class with regard to the previously
trained classes. By evaluating the best-matching clas-
sified groups regarding their subjacent segmentation
the most feasible segmentation feature is identified.
The authors do not state clearly how the knowledge
about which feature performs best is integrated into
the overall process, i.e. how exactly the loop is closed.
Additionally, this approach is limited to classification
into the pre-trained classes.
For segmenting overlapping chromosomes in
images (Schwartzkopf et al., 2005) introduce a
maximum-likelihood test. Based on an erroneous seg-
mentation, the authors achieve a reliable localisation
and classification of the chromosomes due to prior
knowlege about the total number of chromosomes ex-
pected in human cells as well as their composition.
(Guyet et al., 2007) suggest a collaborative
human-machine learning approach based on a multi-
agent feedback system for interpreting medical im-
ages. A pattern recognition segments the image into
the currently known classes which subsequently are
updated in order to adapt to the latest perceptions.
Feedback from classification to segmentation is pro-
vided by adding a new pattern for each new class. The
overall process is supervised by a human and thus in-
congruous for autonomous robots.
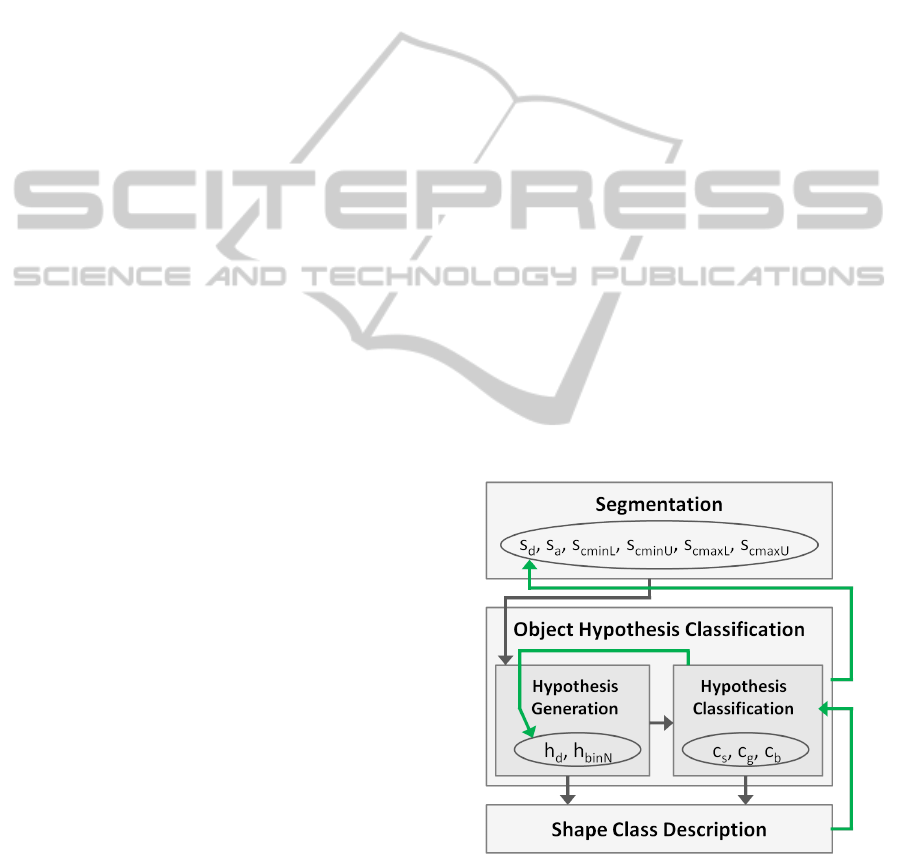
3 CONCEPT
This paper presents a novel concept of joint segmen-
tation and classification based on a set of rules which
is visualised in figure 1. Its benefits will be i) im-
proved robustness to segmentation errors due to feed-
back from the classification and ii) significantly in-
creased robot autonomy owing to autonomous class
generation. Designed for autonomous service robots,
our approach enables the robot’s main task, e.g. a
transportation assignment, neither obstructing nor de-
laying it. Therefore, the classification has to cope
with the well-known results of driving past an object,
i.e. partial views, and hence to use local features for
both segmentation and classification.
Figure 1: Schematic of the joint segmentation and classifi-
cation with feedback visualised in Green. All variables are
defined in the related subsections of section 3.
In human object classification, 3D object shape
is an important feature providing good classification
results even when the other features like colour, tex-
ture or smell are missing, and/or the object shape is
AJointSegmentationandClassificationofObjectShapeswithFeedbackfor3DPointClouds
389
merely partially visible. Taking advantage of this ob-
servation, our classification relies on the 3D object
shape. Note that we do not exactly intend to clas-
sify into real-world object classes as they are known
to humans, but into classes of similar object shapes.
A detailed sampling of surface shapes can easily be
obtained by commertial 3D sensors like the XBox
Kinect or the Velodyne HDL-64E, both providing
high-resolution 3D point clouds.
The main components of our approach are i) the
autonomous generation of shape class descriptions
and ii) the feedback part for improving the overall re-
sult. The first component will be described in subsec-
tions 3.1 to 3.3, covering the segmentation, the gen-
eration and classification of object hypothesis and the
generation of shape class descriptions. Subsection 3.4
details the feedback from classification to segmenta-
tion as well as to object hypothesis generation.
3.1 Segmentation
Many real-world objects can easily be imagined as
groups of homogeneous shape parts, thus we adapt the
idea of part-based shape description from e.g. (Mar-
ton et al., 2011). Instead of restricting shape parts to
shape primitives (i.e. planes, cylinders and spheres),
we intend to enable more flexible shapes by using sur-
face orientation and principal curvatures as segmenta-
tion features as well as part descriptors. Orientation
and principal curvatures, which express a 3D curva-
ture at a surface point by its minimum and maximum
2D curvature, have repeatedly been proven powerful
local surface descriptors. We consider the surfaces at
two points to be homogeneous if they observe three
threshold-based rules:
• The differences in principal curvatures are re-
stricted by lower and upper bounds for the min-
imum as well as the maximum curvature: s
cminL
,
s
cminU
, s
cmaxL
and s
cmaxU
, while curvature direc-
tions have to be similar.
• The angle between both surface normal vectors is
to deceed s
a
.
• The Euclidean distance between the points is less
than s
d
.
The second rule we found helpful in first experiments
for surface partitioning at sharp corners in an over-
all curved surface due to our fast but rough estima-
tion of the principal curvatures which is subsequently
defined. The last rule serves as an initial guess for
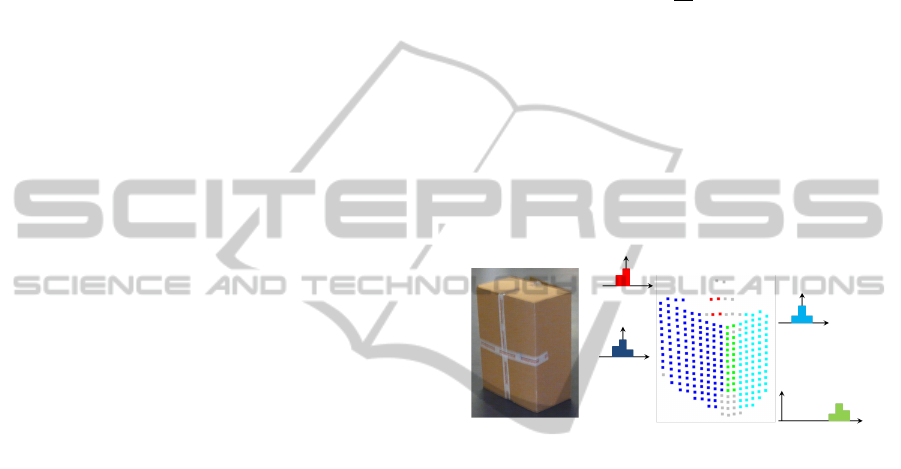
division into real-world objects. Figure 2 shows the
homogeneous shape parts of a box-shaped object.
Taking advantage of our point clouds being or-
dered in a 2D matrix according to the horizontal and
vertical sensor beam emitting angles, a search for
neighbouring scan points is obsolete. Instead, point
neighbourhoods can directly be extracted from the
matrix. An approximation of the local surface nor-
mal vector at a distinct scan point typically is obtained
by applying the Principal Component Analysis to a
small neighbourhood, discarding all points which ex-
ceed the Euclidean distance threshold s
d
. For prin-
cipal curvature calculation, we approximate the lo-
cal 2D curvature with c =
∆α
∆s
, where ∆α denotes the
angle between the surface normals of two neighbour
points and ∆s the Euclidean distance of the points. In-
stead of calculating 2D curvatures for all planes con-
taining the surface normal, we restrict these calcula-
tions to four pre-defined planes: the vertical, the hor-
izontal and both diagonal planes in between. Thus,
we achieve approximations for the principal curva-
ture at a distinct point by evaluating the curvatures to
each point of its direct neighbourhood while neglect-
ing neighbours with a distance higher than s
d
.
Figure 2: Homogeneous shape parts of a simple box-shaped
object with reduced maximum curvature histogram for each
surface part. Colours identify points and histograms of the
different shape parts, while for grey points no curvature
could be calculated because of too few neighbours.
Depending on point density and operating envi-
ronment, very small and very large segments are ex-
cluded from further processing, as they either contain
too few surface information or they most likely derive
from huge homogeneous surfaces like the ground or
walls of buildings. Note that this heuristic does not
exclude uneven ground, which we do not consider at
the present state of our research although it is most
likely to occur in outdoor environments.
3.2 Object Hypothesis Classification
For an initial guess at the group of homogeneous sur-
face parts belonging to the same real-world object,
we cluster segments if the minimum point-wise Eu-
clidean distance between the surface parts deceeds the
threshold h
d
. This simple relation serves as initial
rule for object hypothesis generation and will be re-
fined based on classification feedback. The resulting
groups of surface parts are called object hypotheses.
Aiming at autonomous generation of object shape
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
390

classes, we suggest clustering similarly shaped object
hypotheses and define each cluster a shape class. A
cluster will be generalised to an object shape descrip-
tor representing the shape class as outlined in sub-
section 3.3. Subsequently generated object hypothe-
ses will be clustered with other hypotheses, a shape
class or both. Clustering is based on a similarity mea-
sure which firstly has to enable classifying partial ob-
ject views thus encorporating local components. Sec-
ondly, it has to account for similar but not identical
shapes where even a small number of surface parts
might not match at all as visualised in figure 3, details
given in subsection 3.3. We intend to achieve both
goals by incorporating curvature information of each
surface part as well as the relative positions between
the parts of an object hypothesis. In the following an
object hypothesis description feasible for fast shape
comparison and a rule-based heuristic for shape simi-
larity detection are introduced.
Figure 3: Objects belonging to two shape classes: mostly
clyindrical (left), more free-form (right). Similarly curved
shape parts are marked with solid lines in matching colours,
dashed red lines indicate not-matching curvature indicators
while neglecting small shape parts.
The object hypothesis description bases on a
neighbourhood graph where the nodes contain infor-
mation on the segments and the edges connect ad-
jacent segments satisfying the distance threshold h
d
.
Surface part information consist of i) the mean posi-
ton, ii) an approximation of its size, and iii) a curva-
ture indicator for fast detection of similar surface cur-
vature. The mean position is relevant for generating
the shape class description as well as for the feedback
(subsections 3.3 and 3.4, respectively). The size en-
ables a scale-variant classification and is obtained by
an oriented bounding box.
For a compact description of the local shape part
curvature we suggest principal curvature histograms,
which will serve as curvature indicator and offer a
simple method for curvature similarity measure by
comparing the number of elements in analog his-
togram bins. As the point density on a surface -
among others - depends on the distance to the sen-
sor and the angle of incident, we normalise the bins
by the total number of points in the segment. The re-
sulting histograms can efficiently be represented by i)
discarding the entries of a (normalised) bin if its value
deceeds a mimimum threshold h
binN
, and ii) storing
only the continuous set of remaining filled bins, start-
ing at the lowest and stopping at the highest non-
empty bin. h
binN
ensures to discard noisy values and
to focus on the most prominent curvatures. A high
threshold additionally facilitates comparison, as only
a small number of bins has to be considered. For sim-
plicity, we are neglecting the curvature orientations
at the current state of research, although they might
improve the overall result. For each homogeneous
shape part of figure 2, the reduced representation of
the maximum curvature is visualised.
Based on this object hypothesis description, a pair
of hypotheses or an hypothesis and a shape class are
considered to be similar if they comply with the fol-
lowing threshold-based rules: i) the deviation in size
deceeds c
s
, and ii) more than c
g
percent of the over-
lapping neighbourhood graphs are similar. The latter
rule states that more than c
g
percent of the overlap-
ping graphs contain nodes of similar curvature with
matching adjacent nodes. Similar curvature is de-
noted by no more than c
b
different bins in each corre-
sponding pair of principal curvatures.
Object hypotheses which contain very few shape
information, e.g. because they consist of a single
shape part, are improved by adding information from
subsequent scans of the (assumed) same real-world
object. Restricting our approach to a static environ-
ment at the current state of our research, identification
of hypotheses belonging to the same real-world object
relies on the positions of their shape parts. Hypothesis
enhancement involves detection and merging of simi-
lar parts, the first of which is covered by the hypothe-
sis similarity detection; the latter is part of generating
of shape class descriptions and detailed in the follow-
ing subsection.
3.3 Shape Class Description
Combining a cluster of object hypotheses into a con-
sistent shape class description significantly reduces
the amount of data which has to be stored in order
to retain meaningful shape information. Additionally,
the fusion of multiple hypotheses enables a speed-up
in classification due to a reduced number of shape
comparisons. Presuming measurement noise to suf-
fice a Gaussian distribution, the combined description
is less susceptible to measurement noise whilst incor-
porating all distinct shapes of the object hypotheses
assigned to this class and thus providing a compact
representation of its homogenous parts. Furthermore,
a shape class descriptor has to contain information on
how relevant each of its surface parts is for the shape
AJointSegmentationandClassificationofObjectShapeswithFeedbackfor3DPointClouds
391
class. Shape parts, which are quite similar in all ob-
ject hypotheses assigned to a shape class, can be con-
sidered to contain relevant information of the overall
shape and thus to be very descriptive for this class. In
contrast, shape parts with a large variety of different
shapes among the hypotheses of this class do not con-
tain much information about the overall shape. Fig-
ure 3 shows four differently shaped objects belong-
ing to a total of two object shape classes: primar-
ily cylindrical bottles in the left and more free-form
flasks in the right. Shape parts with matching curva-
ture indicators are emphasised with solid lines of the
same colour. Most pairs of shape parts can be con-
sidered as descriptive for their shape class except for
the pair marked in Yellow whose curvatures in verti-
cal direction differ significantly. Although keeping in
mind the wide variety of object shapes and the result-
ing difficulty of precise boundaries of shape classes,
our intention is to prove our approach in principle.
Thus, we currently focus on a limited number of well-
distinguishable shape classes like those shown in fig-
ures 2 and 3 permitting inner-class shape variations.
For combining shape descriptions we suggest to
merge the points of the hypotheses with the 3dimen-
sional Normal Distribution Transform (NDT) (Huhle
et al., 2008) and to down-sample the resulting point
cloud to the initial point density. For this new point
cloud, homogeneous surface parts and a new shape
parts graph have to be created. The shape class de-
scriptor consists of the combined point cloud, the
graph and, for each node in the graph, the number
of object hypotheses involved. Thus, the descrip-
tion contains the combined shape information with
reduced noise owing to matching and down-sampling.
A new hypothesis can easily be integrated by repeat-
ing NDT merging while weighting the points of a
class description part with its number of involved hy-
potheses and the points of the new hypothesis with
1. This ensures a true mean shape of the previously
combined and the single new hypothesis.
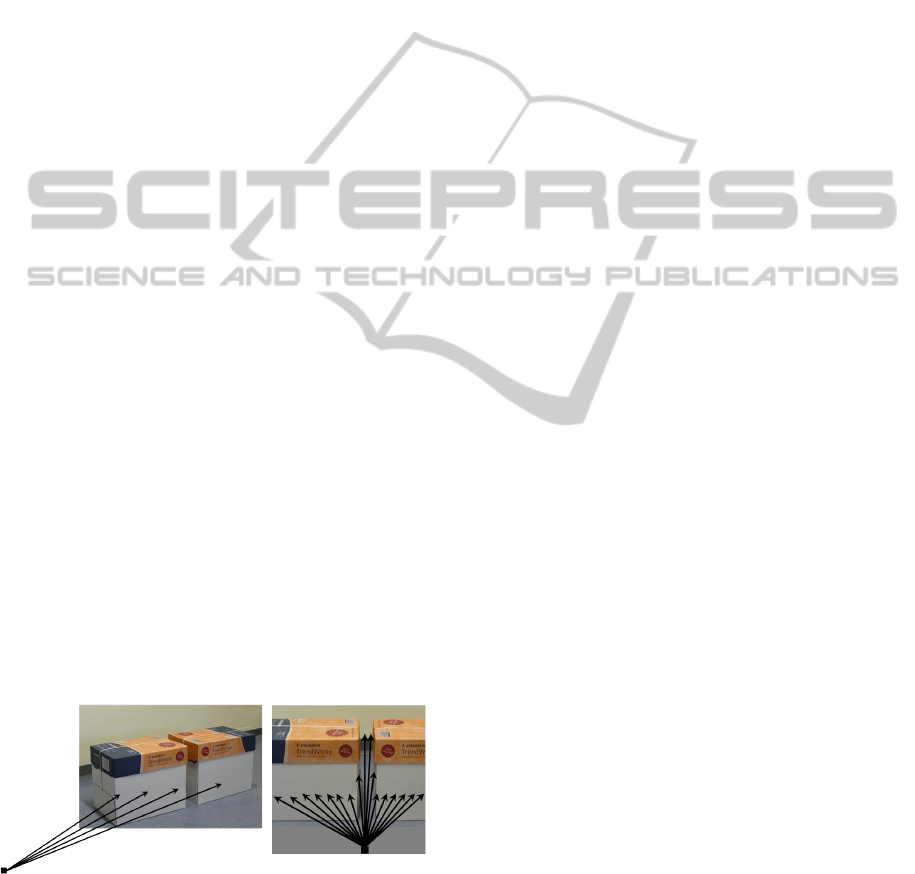
Figure 4: Relationships between incident angle of the sen-
sor beam and point density at the surface. More dense sur-
face sampling offers more reliable surface information.
The shape descriptiveness of a class part is recip-
rocal to its variety among a group of corresponding
shape parts from different hypotheses and can be mea-
sured by the curvature variance, more specificly by
the maximum deviation of the hypotheses shape parts
to their corresponding part in the shape class descrip-
tor. Applying the curvature indicator from subsection
3.2 for example would result in the maximum number
of different bins for the minimum and the maximum
curvature, respectively. This measure of shape part
descriptiveness could be fed back into the hypothesis
classification scheme to achieve a faster and more re-
liable classification, but is not integrated into our clas-
sification scheme at the present state of our research.
3.4 Classification Feedback
Perceptions from perspectives normal to the object
surface in general contain the most reliable informa-
tion. The more the perspective deviates from the sur-
face normal, i.e. the more shallow the incident an-
gle of e.g. the laser beam becomes, the lesser is the
intensity of the reflected beam, which could lead to
less reliable distance measurements. But more im-
portant, for more shallow angles the point density
on the surface decreases significantly, as visualised
in figure 4. In consequence perceptions from shal-
low incident angles contain considerable less infor-
mation on the surface shape. Additionally, from a
disadvantageous perspective, several object config-
urations might be percieved as a single object be-
cause the non-connected parts are not detected. On
the one hand, sparse sampling at a shallow angle of
incident could cause the erroneous seperation of a
single object into several segments and thus under-
segmentation. On the other hand, it could result in
the erronous merging of multiple objects to a single
segment, i.e. to under-segmentation, due to invisibil-
ity of non-connected parts. Both cases of segmenta-
tion faults would cause significant errors in the clas-
sification results and, as a consequence, in the shape
class descriptors, if they were not detected and elim-
inated. For detection, we suggest to use the shape
information of several perceptions of the (assumed)
same real-world object from different perspectives re-
dundant in most parts. As we restrict the environment
to be static, perceptions of the same real-world ob-
ject are those which cover the same global position.
We suggest to evaluate differences in shape parts in
combination with the reliability of the shape parts. In
consistency with the above considerations, the steep-
ness of the incident angle results in an approximation
of the reliability of a surface part, which can be used
for selecting the most reliable of several contradictory
perceptions of the (assumed) same real-world object.
If a less reliable shape contrasts a reliable one, the
latter is chosen for further processing. Additionally,
ICINCO2012-9thInternationalConferenceonInformaticsinControl,AutomationandRobotics
392

the segmentation distance threshold s
d
is adapted to
prevent future false segmentations. As the reliability
of a perception depends on its perspective, the new
distance threshold s
f d
is defined as a function of the
perspective, strictly speaking, of the angle between
surface normal and the connecting line of the position
of the surface part and the sensor. Initialising s
f d
with
s
d
for all angles, the value assigned to a certain angle
has to be reduced in case of under-segmentation and
to be increased in case of over-segmentation. Analo-
gously, a threshold function h
f d
has to be applied for
object hypothesis generation instead of h
d
.
4 FUTURE WORK
Currently, we are working on the object hypothe-
sis generation, which partially includes the proposed
segmentation. Thus, the main parts of the concept,
class generation and feedback, have still to be set up,
verified and evaluated. For the sake of simplicity,
we will restrict our system to a static environment,
which would not result in loss of generality. Addition-
ally, we will start feedback verification with simply
shaped objects like boxes and self-generation of ob-
ject classes with a set of well distinguishable shapes
with slight variations within each class, like those il-
lustrated in figures 2 and 3. The final part of our fu-
ture work will be the evaluation of the overall system.
For further improvement of the classification scheme,
it will include the feedback of shape part descrip-
tiveness, derived while generating the shape class de-
scriptions, into the hypothesis classification step.
5 CONCLUSIONS
In this paper, we introduced our idea for a joint seg-
mentation and classification with feedback. We are
confident that our approach can significantly con-
tribute to a more robust as well as a more autonomous
object classification thus overcoming traditional clas-
sification methods which either rely on an initial train-
ing set or some other specific information. As this
kind of information has a priori to be provided by a
human, the robot cannot act truly autonomously. Ad-
ditionally, this kind of information is difficult to ob-
tain even for humans, given the incompletely-known
and ever-changing environment, in which the robot
typically operates. In contrast, our approach au-
tonomously generates object classes. Consequently,
we expect a considerable improvement of autonomy
due to our self-generating object classes fom environ-
ment perceptions based only on a simple set of rules.
Furthermore, the joint segmentation and classification
feeds back classification results into both the segmen-
tation and the object hypothesis generation, and thus
is able to prevent many cases of over- and under-
segmentation, which typically occur due to incorrect
assumptions and thresholds in both segmentation and
hypothesis generation.
REFERENCES
Chen, Z. and Ellis, T. (2011). Multi-shape descriptor vehi-
cle classification for urban traffic. In Proceedings of
Digital Image Computing: Techniques and Applica-
tions. IEEE.
Endres, F., Plagemann, C., Stachniss, C., and Burgard, W.
(2009). Unsupervised discovery of object classes from
range data using latent dirichlet allocation. In Pro-
ceedings of Robotics: Science and Systems. The MIT
Press.
Farmer, M. and Jain, A. (2004). A wrapper-based approach
to image segmentation and classification. In Transac-
tions on Image Processing Volume 14 Issue 12. IEEE.
Guyet, T., Garbay, C., and Dojat, M. (2007). A human-
machine cooperative approach for time series data in-
terpretation. In Proceedings on Artificial Intelligence
in Medicine. IEEE.
Huhle, B., Magnusson, M., Strasser, W., and Lilienthal, A.
(2008). Registration of colored 3d point clouds with
a kernel-based extension to the normal distributions
transform. In Proceedings on Robotics and Automa-
tion. IEEE.
Knopp, J., Prasad, M., and Van Gool, L. (2010). Orien-
tation invariant 3d object classification using hough
transform based methods. In Proceedings of the ACM
workshop on 3D object retrieval. ACM.
Lai, K. and Fox, D. (2009). 3D laser scan classification us-
ing web data and domain adaptation. In Proceedings
of Robotics: Science and Systems. The MIT Press.
Lecumberry, F., Pardo, A., and Sapiro, G. (2010). Simul-
taneous object classification and segmentation with
high-order multiple shape models. In Transactions on
Image Processing Volume 19 Issue 3. IEEE.
Marton, Z.-C., Pangercic, D., Blodow, N., and Beetz, M.
(2011). Combined 2d-3d categorization and classifi-
cation for multimodal perception systems. In Interna-
tional Journal of Robotics Research. SAGE Publica-
tions.
Schwartzkopf, W., Bovik, A., and Evans, B. (2005).
Maximum-likelihood techniques for joint
segmentation-classification of multispectral chromo-
some images. In Transactions on Medical Imaging
Volume 24 Issue 12. IEEE.
Triebel, R., Shin, J., and Siegwart, R. (2010). Segmenta-
tion and unsupervised part-based discovery of repet-
itive objects. In Proceedings Robotics: Science and
Systems. The MIT Press.
AJointSegmentationandClassificationofObjectShapeswithFeedbackfor3DPointClouds
393
