
Improving Network Performane
Management of Nonlinear Dynamics
Seyed Shahrestani
School of Computing and Mathematics, University of Western Sydney, Sydney, Australia
Keywords: AQM/RED, Bifurcation Analysis, Delay Control, Internet, Nonlinear Dynamics.
Abstract: To manage the huge amount of traffic that is to be carried using the limited bandwidth and other resources,
large networks and the Internet are heavily dependent on the use of protocols, and in particular, on TCP/IP
protocol suite. While the utilization of TCP/IP is of significant practical value, for most large complex
networks it can be inefficient, as it fails to fully take into consideration the importance of the major parts of
the system. To overcome this, more complicated congestion control mechanisms, such as AQM/RED are
widely utilized. However, these complex mechanisms exhibit nonlinear dynamics, which are not well
understood and are usually unaccounted for. As a result of this, to avoid oscillatory behavior or loss of
stability, the parameters of these systems are often set too conservatively. In turn, this will lead to
unnecessary underutilization of the network resources. On the other hand, through the analysis and
management of nonlinearities, the operability regions for the networked systems can be expanded, while its
performance is also improved. This paper presents our visionary works of applying these ideas to networked
systems, resulting in higher loading and throughput, and avoiding oscillatory or unstable behavior.
1 INTRODUCTION
The explosive growth of the Internet has provided
modern societies with many new opportunities and
challenges. Apart from the two end-systems,
invariably for communications outside a LAN,
routers play dominant roles in establishing the
communication paths. In general, given the store-
forward nature of the Internet, queuing and delay of
packets are inventible.
Obviously, the utilized transport protocols play a
major role in delay and reliability of communications
of the packets. However, it is well established that
for most large networks this simplistic utilization of
TCP/IP can result in severe inefficiencies (Fan,
2010). Such approaches tend to ignore to fully take
into consideration the importance of the major parts
of the system, namely the routers and the links or the
network itself.
To overcome such inefficiencies, many
approaches have been proposed and implemented. Of
the well established approaches, among these, is the
so-called Active Queue Management (AQM).
Random Early Detection (RED) is the most widely
used AQM scheme (Hollot, 2002). While the
concepts behind RED mechanism are very
straightforward, its interfaces with TCP can lead to
nonlinear dynamics that are not well understood. The
rather complex Internet behavior arising from the
existence of inherent nonlinearities can cause
instability and oscillatory dynamics. To avoid such
undesirable dynamics, in practice the parameters of
AQM/RED mechanisms may be set more
constrained, compared to what the system is actually
capable of. In other words, underutilization of the
networks and resources has been a common practice
as the system is set to operate below its operation
limits.
Nonlinearities of TCP/AQM and the drastic
changes of the system behavior that they can cause,
even with small loading changes for example, are
well established (Chen, 2005). Such variations in
behavior and the existence of chaos can in turn be
linked to bifurcations in the networked systems (Liu,
2007). Consequently, rather than ignoring the
nonlinearities, it is advantageous to exploit them and
employ strategies to manage and control the chaotic
behavior and bifurcations. This must be based on a
global view of the system and can improve
performance of the underlying networks, leading to
higher loading possibility of the Internet without the
oscillatory or unstable behavior (Shahrestani, 2000).
52
Shahrestani S..
Improving Network Performane - Management of Nonlinear Dynamics .
DOI: 10.5220/0004129900520057
In Proceedings of the International Conference on Data Communication Networking, e-Business and Optical Communication Systems (DCNET-2012),
pages 52-57
ISBN: 978-989-8565-23-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

To facilitate the discussion of these points, this
paper is organized as follows. The bifurcation and
structural stability analysis are introduced in the next
section. Such analysis is used to study the
performance of the AQM/RED based networks. The
results along with strategies to manage such
networks to improve their performance are presented
in Section III. The conclusions and potential future
works are given in the last section.
2 MANAGEMENT OF COMPLEX
NETWORKS
Many complex systems, such as large networks,
exhibit multiple equilibrium points leading to several
potential steady-state operating states. Such systems
require a management scheme capable of
administration over a wide range of anticipated
operating conditions. In developing such schemes,
the qualitative changes that occur in the behavior of
the system in different operating regions must be
taken into account.
The limits, at which qualitative changes in
complex system behavior occur, may be related to
the structural stability of the system. The structural
stability limits of a nonlinear system can in turn be
related to bifurcation points in the mathematical
model of the system. The bifurcations refer to
qualitative changes in the system behavior as some of
the system parameters vary quasi-statically (Seydle,
2010).
Complex nonlinear dynamical systems can
generally be described by a number of coupled
differential-algebraic equations
(1)
Where t is time, x(t) and a are the dynamic and
instantaneous states of the system and w represents
external influences, such as system input, time
varying parameters, disturbances, and the like. Now,
consider a single-output case where the variations of
the control input u(x,a,t) and another one of the
system parameters
min max
( ) [ , ]t
, dominate other
variations in the system. For example, in networked
systems there is a rather clear separation between the
time-frames involved in the analysis (and design of
the required management actions) for transient
congestion and delay and longer-term bandwidth and
capacity management consideration (Shahrestani,
2011). To emphasis these points, the model (1) can
be put in the following form
(2)
A typical network management problem can be
considered as identification and setting of system
parameters such that a point
d
x
is a secure operating
point of the system (2). Additionally, there may be
constraints on the manageable parameters or the
specification of transient characteristics of the
network. Naturally, if with
,
d
xx
no proper
manageable and controlled parameters satisfying (2)
can be identified, then the network will not be
operable steadily at that point.
More generally though, the system state may be
considered to be constrained to a certain operating
region
,
d
X
containing steady operating points (or in
some cases, to some operating region containing
secure oscillatory solutions with restrained
amplitudes). Consequently, with properly identified
parameters at the operating points, the state space
region of interest for system (2) can be considered as
min max
{ },
d e e e e
X x x x x
(3)
while
varies slowly with time within a certain
range of interest
{
d
min max
},
e e e e
(4)
The value of the managed parameters with the
network operating at some steady-state, is to be
chosen such that the existence of some
ed
xX
for
some
d
is assured. Therefore, with a particular
and proper value of
,
e
u
say
,e e j
uu
, the network
operation constrained to region
d
X
may happen to
exist for only a range
,
jd
defined by
min max
{ | }
d
(5)
That is, to cover the complete range of interest
d
in general, multiple sub-ranges may need to be
considered, with each sub-range corresponding to a
different set of managed parameters with the system
at steady-state. These points are illustrated in Figure
1. It can also be noted that each value of
,ej
u
00
.
( , , , ),
0 ( , , , ),
( , , , ); ( ) .
x f t x a w
t x a w
y h t x a w x t x
.
( , , , ),
0 ( , , , ),
( , ).
x f x a u v
x a u v
y h x a
Improving Network Performane - Management of Nonlinear Dynamics
53
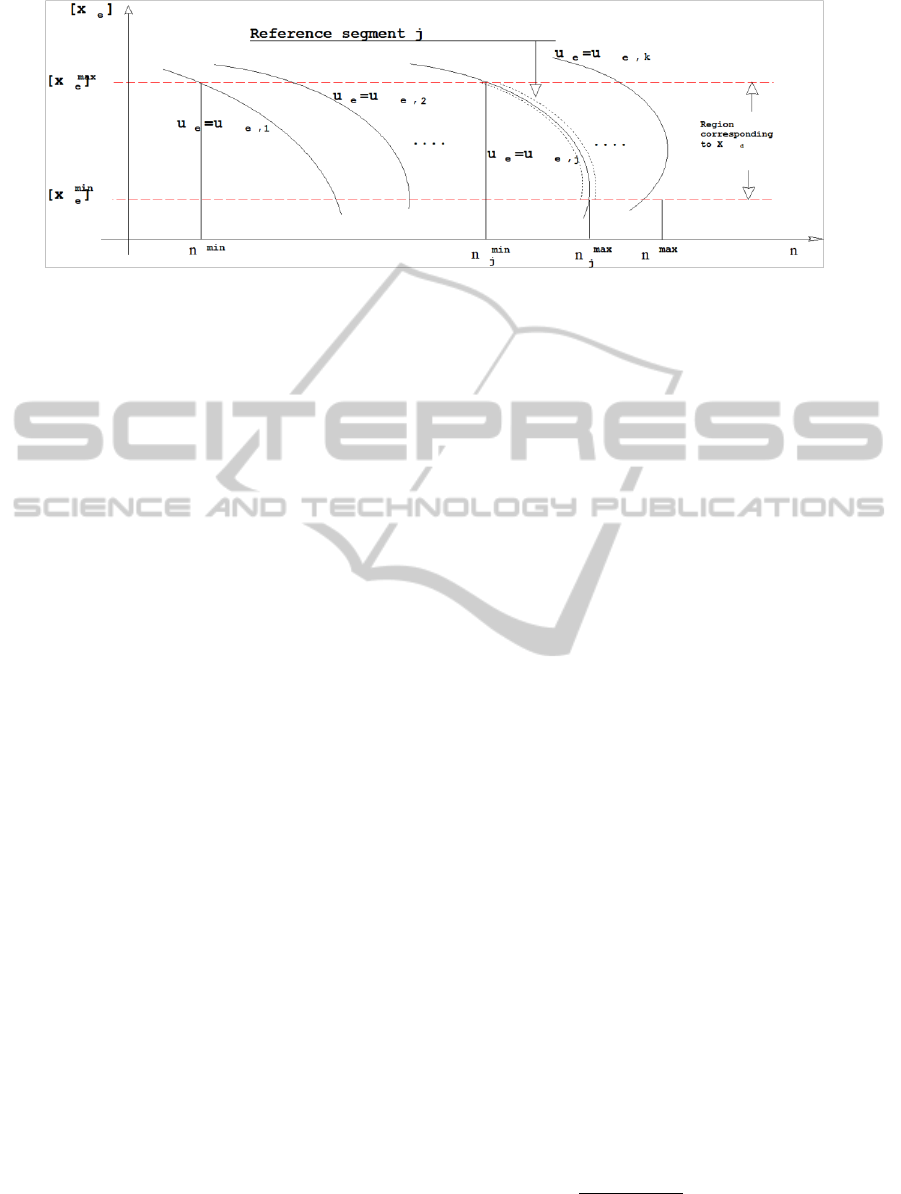
Figure 1: An illustration of parameter dependent steady-state operation manifolds.
corresponds to some reference segment on the
parameter dependent steady-state operation manifold
of a nonlinear system such as (1).
As pointed out earlier, in general, the region
d
X
may contain steady-state operating points with
different characteristics. That is, as
varies within
its limits, the system with the managed parameters
being simply set as
,
,
ej
uu
may exhibit
qualitatively different behavior for different levels of
. To account for the manager capability in handling
the system dynamics appropriately, the managed
parameters are now considered as
,
.
e j j
u u u
The critical values of the slowly changing parameter
that are associated with the boundaries of
operating regions with distinct dynamic behaviors,
correspond to bifurcation points of the system (2).
In some cases, the management of bifurcating
systems is achieved by ensuring that the system
operation is such that the bifurcation parameter is
always below its critical values, and the bifurcations
are ultimately avoided (Shahrestani, 2000). While this
approach solves part of the operation problems, it can
result in a conservative design with for example
loading margins larger than what is really required.
For a bifurcating system exhibiting regions with
non-identical structural stability behavior, the
bifurcation points may be used to establish the
bounds on segments of the state space of the system
with different management requirements.
Consequently, depending on the ranges of the
bifurcation parameter, several regional management
schemes will be needed, while each scheme may
pursue a different objective. For example, in some
range of the bifurcation parameter the manager may
force the system to track the existing steady-state
operation points while in some other range, the
stabilization of the bifurcated solutions may be the
primary objective of the managing scheme. These
points are further illustrated through management of
delay and congestions to improve the network
performance, in the next section.
3 SHAPING THE NETWORK
BEHAVIOR
To reduce the delay and to achieve improved
throughput, many adaptive Random Early Detection
(RED) algorithms have been developed and studied.
As discussed before, to overcome the shortcomings
associated with the linear dropping probability
functions originally used by adaptive RED, the
utilization of nonlinear adaptive approaches have
found widespread acceptance. These approaches are
mainly based on Active Queue Management (AQM).
As mentioned before, utilization of AQM/RED
introduces complex nonlinearities. Such
nonlinearities can in turn induce several bifurcated
solutions.
Effectively, the RED controller output that
provides the feedback to sender, is a probability of
drop rate p(t). This probability is a function of
average queue length q(t). The nonlinearities of the
AQM/RED model are essentially a consequence of
the multiplicative characteristics of packet loss and
are represented through describing TCP window
control mechanism (Rezaie, 2007).
Ignoring secondary effects and with D denoting
the propagation delay, it can be shown that R(t), the
round trip delay, will be ((ω/c) + D). The packet drop
probability, as a function of queue length q(t), can
then be put in the following form (Raina, 2005).
(6)
( ) 0, ;p q q qMin
()
( ) ( ), qMin<
q t qMin
p q pMax q qMa
qMax qMin
( ) 1, p q q qMax
DCNET 2012 - International Conference on Data Communication Networking
54
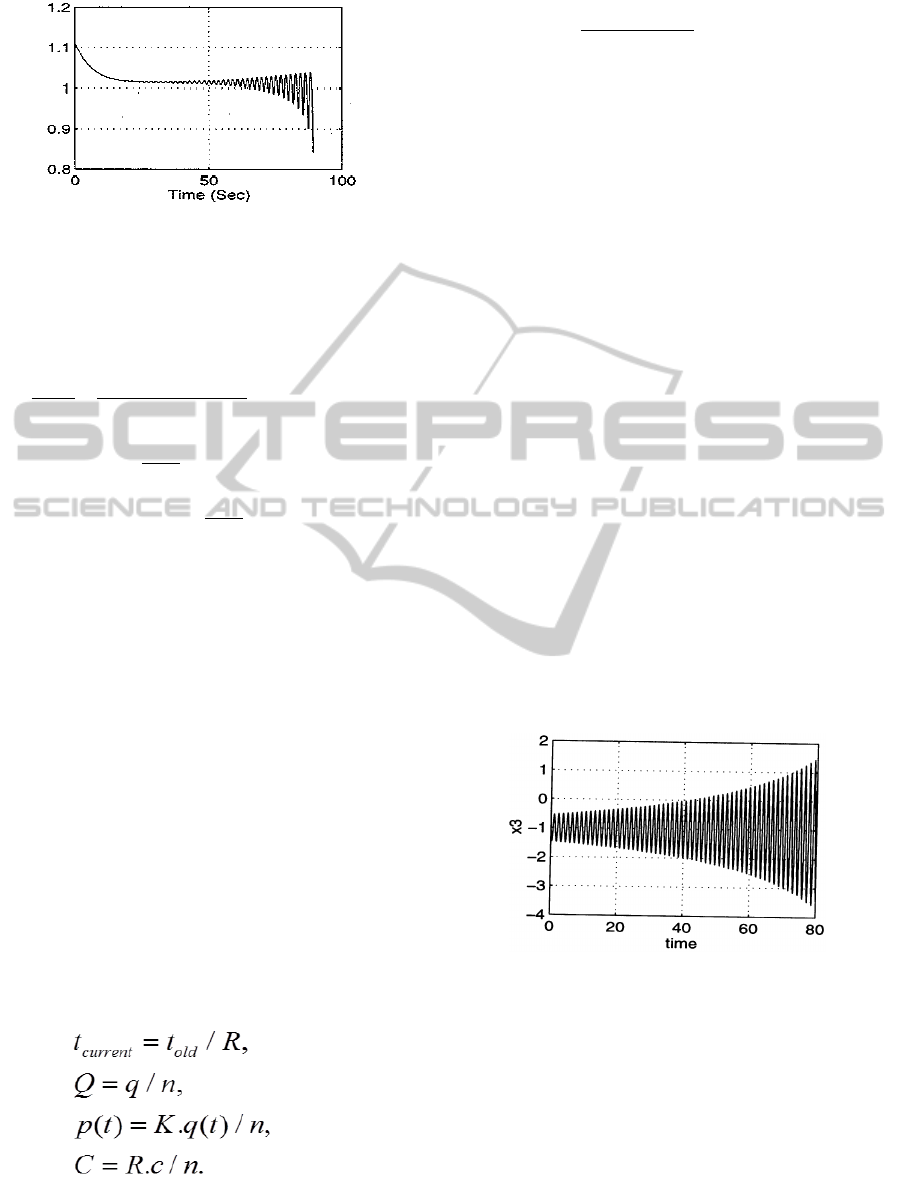
Figure 2: Unstable oscillatory behavior, at network loading
near but after a bifurcation point.
The TCP/AQM and the router queuing dynamics can
be described by the following set of differential
equations (Misra, 2000) and (Ranjan, 2004).
(7)
In this model, p(t) is the probability of packet drop
within the closed interval [0, 1], R is the round trip
delay in seconds, ω(t) is the average TCP window
size in packets, q(t) is the average length of the queue
in packets, , c is the link capacity in packets per
second, and n is the load factor or the number of TCP
sessions.
In most network management analysis, it is
assumed that the load n(t) and the round trip delay
R(t) are time-invariant. Given their slow variations
compared to other network parameters, this is usually
a reasonable assumption. But it is more realistic to
consider them varying slowly with time. This is in
line with bifurcation analysis approaches.
With these considerations, the second set of
differential equations (7) can be normalized by noting
that the dropping probability p(t) is proportional to the
queue length. The normalization can be carried out by
using the following substituting in those equations
(Rezaie, 2007).
(8)
These substitutions will result in the following
normalized equations.
(9)
The system described by the normalized
differential equations in (9) has a unique equilibrium
point,
2
( ,2/( . )).c K c
Due to space limitations, only
the results of bifurcation analysis of this model are
presented here. The eigenvalue analysis of this system
shows that a zero eigenvalue occurs for
0.K
This
corresponds to one of the bifurcation points, at which
the system behavior changes and bifurcated solutions
are expected to emerge.
It can be noted that generally speaking, most of
the RED parameters are set based on network
manager experiences or at best based on experiential
data. This may lead to very conservative set-ups to
avoid instability or cyclic behavior similar to those
discussed so far and portrayed in Figure 2.
The choice of the RED parameters, selected by
the network administrator, dictates the value of K. In
other words, if the network manager sets the RED
parameters in a way that K is close to zero, a small
disturbance, such as small variations in network
traffic can destabilize the network through
disappearance of a stable steady-state operating
point. This means that under such conditions, even
vey small variation in network traffic can result in
the collapse of the whole network operation.
Figure 3: Growing oscillatory behavior, at network loading
near a bifurcation point.
Perhaps, more interestingly, it can be shown that
for each value of c, while K remains below some
certain limit, say K
s
, there exist exactly one stability
nterval that is a function of K. In that interval, the
network is operable, although at high levels of traffic,
oscillatory responses can come into picture. On the
other side of this point, with the RED parameters
chosen such that K>K
S
, growing oscillatory solutions
can be expected. Obviously the growing oscillations
.
1 ( ). ( ( ))
( ( ))
( ) 2( ( ))
t t R t
p t R t
R t t R t
()
( ), 0
()
()
max[0, ( )], 0.
()
.
() {
nt
c t q
Rt
nt
c t q
Rt
tq
.
( ) ( 1)
1 ( 1)
2
tt
KQ t
.
( ) , 0
max[0, ( ) ], 0
() {
t c Q
t c Q
tQ
Improving Network Performane - Management of Nonlinear Dynamics
55
lead to unstable operation of the system and collapse
of the network. The expected system behavior for
values of K just after K
S
, will be similar to that shown
in Figure 2. K
S
corresponds to a subcritical Hopf
bifurcation of the original nonlinear system
describing AQM/RED. In the Hopf bifurcation a
branch of stable periodic solutions originates, which
again becomes unstable after a period doubling
bifurcation. The sequence of period doubling
bifurcations ultimately leads to chaos. For more
details see (Shahrestani, 2000). For the chaotic
situation, the unstable oscillatory behavior that the
network exhibits will be dependent on its initial state.
The behavior will be similar to those depicted in
Figure 4.
Clearly, more analytical approaches for selection
of RED controller parameters and analysis of their
effects on the network performance will be
advantageous. In our previous works, we have
developed a framework for design of management
schemes and control laws for a parameter dependent
complex nonlinear system (Shahrestani, 2000) and
(Shahrestani, 2008).
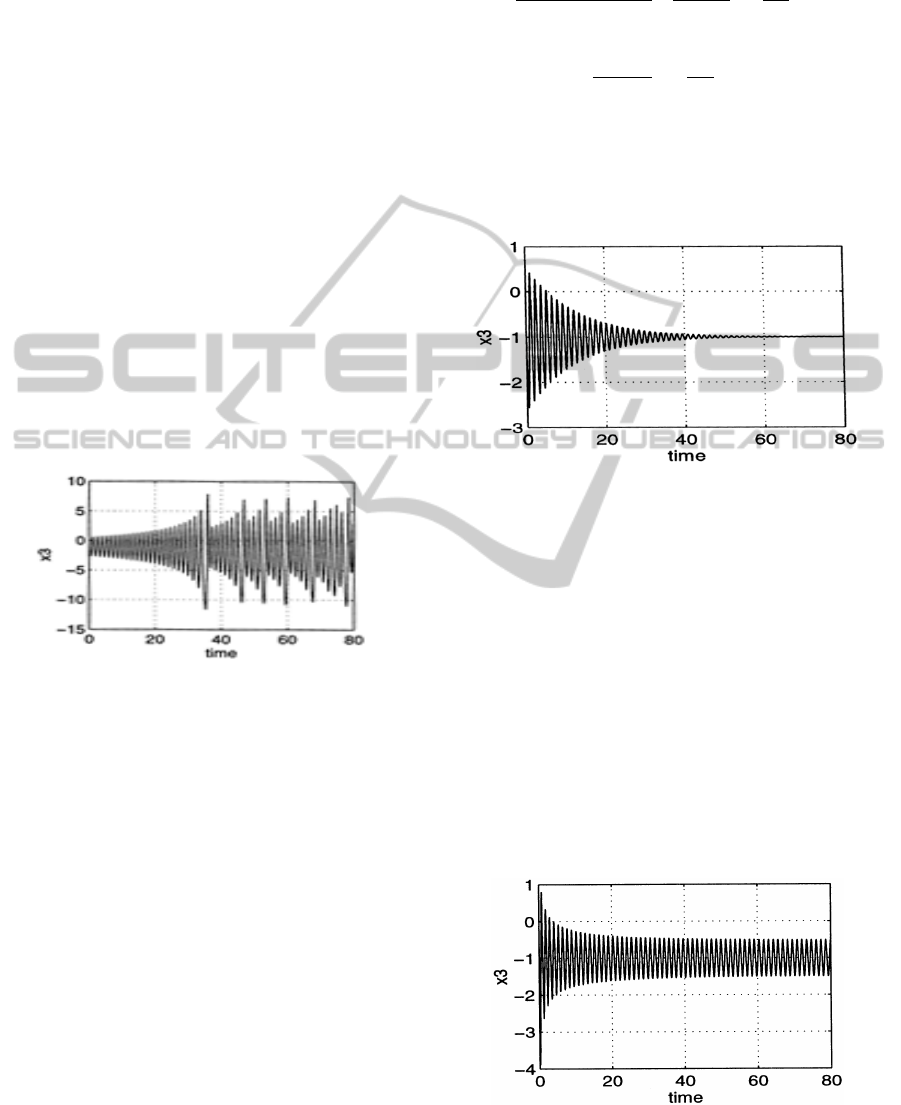
Figure 4: Unstable oscillatory behavior.
The result is a global multilevel management and
control scheme, where the first level depending on
signal and loading levels switches the parameters, so
that the system states are confined to the
neighborhood of some desired reference segment.
For each reference segment, the information gained
through bifurcation analysis is used for further
segmentation of the state space of the system, similar
to that shown in Figure 1.
To move the eigenvalues, λ,
,
,
ˆ
to ( )
i
i
jk
jk
jj
(10)
to locations,
corresponding to more desirable
behavior and operations, the so-called modal control
approach will require the feedback
2
1
( ( ) ) ;
i i i T
nn
n
u k l x
(11)
where the gains are
ˆˆ
( )( )
(1 ),
( ) ( ) 2
()
i i i i
j j j k
i
j
i T i i
j j j
k
iT
lb
lb
j
(1 ).
2
()
i
k
k
iT
lb
j
(12)
With such modal control, the response of the
system with the situation the same as that shown in
Figure 4 will be improved to the stabilized behavior
shown in Figure 5.
Figure 5: Stablized behavior through modal control,
corresponding to the response shown in Figure 4.
In our previous works we have also shown that
only the feedback of critical variables up to cubic
terms may have any effect on the existence of a Hopf
bifurcation or changing the stability behavior of the
bifurcated solutions. Obviously, even for a system
with controllable modes only linear terms have any
effect on the location of the eigenvalues.
Consequently, to change a subcritical bifurcation to a
supercritical one, quadratic and/or cubic (critical)
state feedback can be identified. These relate to
improving the network behavior, when the dynamics
exhibit oscillatory behavior. Figure 6 for instance,
shows the effect of cubic state feedback for the same
situation depicted in Figure 4.
Figure 6: Stablized behavior by cubic state feedback,
corresponding to the response shown in Figure 4.
DCNET 2012 - International Conference on Data Communication Networking
56

4 CONCLUDING REMARKS
In this paper, some approaches to improve the
performance of complex networks are proposed.
These are based on the analysis and management of
the system nonlinear dynamics and bifurcations. By
managing the bifurcations, performance of these
networks can be improved while their operability
region can also be expanded. We also reported the
works in-progress towards applying these ideas to
establish a more analytical management scheme for
networked systems. Choosing and regulating the
parameters, based on these types of analysis and
management and their utilization in communication
systems and the Internet can result in expanding their
stability and operability regions, for instance over a
wide range of loading, throughput, delay and
congestion levels over TCP connections. In our
future works, we aim to expand these ideas and
validate the analytical results through more
experimental works.
REFERENCES
Chen, Z., Yu, P., 2005. “Hopf bifurcation control for an
internet congestion model,” Int. J. of Bifurcation and
Chaos, vol. 15, no. 8, pp. 2643-2651.
Fan, X., Zheng, F., Guan, L., Wang, X., 2010. "NLAR: A
New Approach to AQM," IEEE 24th International
Conference on Advanced Information Networking and
Applications Workshops (WAINA).
Hollot, Misra, V., Towsely, D. and Gong, W., 2002.
“Analysis and design of controllers for AQM routers
supporting TCP flows,” IEEE Trans. Automatic
Control, vol. 47, no. 6, pp. 945–959.
Liu, F., Guang, Z., Wang, H., 2007. “Impulsive Control
Bifurcation and Chaos in Internet TCP-RED
Congestion Control System,” Proc. IEEE International
Conference on Control and Automation, Guangzhou,
CHINA, pp. 224-227.
Misra, V., Gong, W., and Towlsey, D., 2000. “Fluid-based
analysis of a network of AQM routers supporting TCP
flows with an application to RED,” Proc. ACM
SIGCOMM, Stockholm, Sweden.
Raina, G., 2005. “Local bifurcation analysis of some dual
congestion control algorithms,” IEEE Trans. Automatic
Control, vol. 50, no. 8.
Ranjan, P., Abed, E., and La, R., 2004.“Nonlinear
instabilities in TCP-RED,” IEEE/ACM Trans.
Networking, vol. 12, no. 6, pp. 1079-1092.
Rezaie, M., Jahed Motlagh, Khorsandi, S., Analoui, M.,
2007. “Analysis and Control of Bifurcation and Chaos
in TCP-Like Internet Congestion Control Model,”
Proc. 15th International Conference on Advanced
Computing and Communications.
S. Shahrestani, S., 2008. “Utilization of Soft Computing to
Improve Cooperative Management Efficiency,”
WSEAS Transactions on Circuits and Systems, vol 7,
no. 7, pp 620-629.
Seydle, R., 2010. Practical Bifurcation and Stability
Analysis, 3rd ed., Springer.
Shahrestani, S., 2011. “Improving the Network
Performance and Management of Operability
Regions,” in Proc. 36th LCN, Bonn, Germany, pp. 946-
950.
Shahrestani, S., and Hill, D., 2000. “Global Control of
Stressed Power Systems,” in Proc. 39th IEEE
Conference on Decision and Control, Sydney, pp. 3080
–3085.
Shahrestani, S., and Hill, D., 2000. “Global control with
application to bifurcating power systems,” Systems and
Control Letters, vol. 41, no. 3, pp. 145-155.
Improving Network Performane - Management of Nonlinear Dynamics
57
