
Some Empirical Evaluations of a Temperature Forecasting Module based
on Artificial Neural Networks for a Domotic Home Environment
F. Zamora-Mart
´
ınez, P. Romeu, J. Pardo and D. Tormo
Embedded Systems and Artificial Intelligence Group, Departamento de Ciencias F
´
ısicas, Matem
´
aticas y de la
Computaci
´
on, Escuela Superior de Ense
˜
nanzas T
´
ecnicas (ESET), Universidad CEU Cardenal Herrera,
46115 Alfara del Patriarca, Valencia, Spain
Keywords:
Artificial Neural Networks, Temporal Series Forecasting, Domotic Home Automation.
Abstract:
This work presents the empirical evaluation of an indoor temperature prediction module which is integrated
in an ambient intelligence control software. This software is running on the SMLhouse, a domotic house built
by our university. A study of impact on prediction error of future window size has been performed. We use
Artificial Neural Networks models for a multi-step-ahead direct forecasting, using an output size of 60, 120,
and 180. Interesting results have been obtained, in the worst case a Mean Absolute Error of 0.223
◦
C over a
validation set, and 0.566
◦
C over a hard unseen test set. This results inspire the development of an automatic
control built over this predictions, that could manage the climate system in order to enhance the comfort and
energy efficiency of our house.
1 INTRODUCTION
In recent years the use of Artificial Neural Net-
works (ANNs) for prediction applications is grow-
ing (Zhang et al., 1998; Carney et al., 1999; Thomas
and Soleimani-Mohseni, 2006; Cheng et al., 2006; Yu
et al., 2008). ANNs have shown to have powerful pat-
tern classification and pattern recognition capabilities.
It is well known that one major application area of
ANNs has been forecasting (Zhang et al., 1998). They
learn from examples and capture subtle functional re-
lationships among the data even if the underlying re-
lationships are unknown or hard to describe. Thus
ANNs are well suited for problems whose solutions
require knowledge that is difficult to specify but for
which there are enough data or observations (Zhang
et al., 1998).
Moreover ANNs have proven to be successful on
nonlinear forecasting of time series, more even if the
time series are chaotic or the underlying model is un-
known. Indoor temperature behavior is an example
of this kind of problems. It is directly related to the
meaning of comfort. A person can much easier per-
form its activities if its comfort, at home or at office,
is ensured and there are no negative factors (e.g. cold,
heat, low light, noise, low air quality, etc.) to disturb
him. In most cases keeping adequate comfort parame-
ters involves a considerable energy consumption. Ac-
cording to IDAE (Instituto para la diversificaci
´
on y
ahorro de la energ
´
ıa (IDAE), 2011), Spanish house-
holds consume a 30% of the total energy expenditure
of the country. This means an important percentage
value that makes it worth to think about how to man-
age such consumption efficiently.
Our University has built a house supplied by solar
energy (SMLhouse), which integrates a whole range
of different technologies to improve energy efficiency
consumption. The house has been constructed to par-
ticipate in international competitions on energy effi-
ciency. To fulfill with the efficiency issues of this in-
ternational competitions, a Computer Aided Energy
Saving (CAES) system is being developed. It aims
to improve energy efficiency and home automation
using artificial intelligence techniques. It has been
designed and implemented a hardware architecture
that uses KNX network protocol as the basis for con-
nection and selection of monitoring devices and sig-
nal capture. Although there are other interconnec-
tion protocols, KNX is used because it is one of the
most widely used standards in the industry of home
automation in Europe. Regarding the software archi-
tecture, it has been implemented a system that allows
massive data capture for the development of ambient
intelligence modules. The goal is to design a stan-
dalone module for each subsystem, playing the role of
intelligent agent inside a network of different agents.
206
Zamora-Martinez F., Romeu P., Pardo J. and Tormo D..
Some Empirical Evaluations of a Temperature Forecasting Module based on Artificial Neural Networks for a Domotic Home Environment.
DOI: 10.5220/0004133502060211
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2012), pages 206-211
ISBN: 978-989-8565-29-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
This paper is focused on our research and devel-
opment of an ANN module to predict the indoor tem-
perature behavior. The predicting results will be in-
tegrated with the prediction of other agents, which
interact between them to establish acceptable com-
fort levels and consumption parameters of our SML-
house. Some experiments were conducted to select
the best ANN parameters for our task. We need a sys-
tem that will work at different future prediction levels,
as minutes, hours or days. Nevertheless this work is
focused on a future prediction of one, two and three
hours that are interesting for the most immediate ac-
tions. We compare our model with a widely ANN ap-
proach, finding that we are achieving interesting im-
provement.
2 DOMOTIC HOME
ENVIRONMENT SETUP
This section describes the setup of the SMLhouse.
The control and monitoring system is called Com-
puter Assisted Energy Saving (CAES) system. The
CAES system is essentially a software architecture,
built over hardware architecture which offers diverse
devices for acting and sense purposes. The CAES sys-
tem is running at a computer called the Master Con-
trol Server (MCS).
2.1 Hardware Architecture
The European standard KNX has been chosen. KNX
modules are grouped by functionality: analog or bi-
nary inputs/outputs, gateways between transmission
mediums, weather stations, motion detectors, smoke
detectors, etc. In the proposed system the immedi-
ate execution actions had been programmed to oper-
ate without the involvement of the MCS, such as turn-
ing lights on/off and raise/lower stores. Beyond this
basic level the MCS can read the status of sensors and
actuators at any time and can perform actions on them
via one TCP/IP gateway.
2.2 Software Architecture
This section describes the software architecture devel-
oped for the SMLhouse to deal with capturing, moni-
toring, and manual controlling tasks. The indoor tem-
perature forecasting module is built on the top of a
three-layered software (Figure 1 illustrates the archi-
tecture). The complete integration of all the software
layers plus the intelligence modules are the control
and monitoring system.
In the first layer, data is acquired from the KNX
KNX-IP Bridge
Persistance
iOS Interface
ANN Modules
Figure 1: Three layer software topology.
bus using a KNX-IP bridge device The Open Home
Automation Bus (Kreuzer and Eichst
¨
adt-Engelen,
2011) performs the communication between KNX
and our software. At the second layer it is possible
to find a data persistence module that has been devel-
oped to collect the values offered by openHAB with a
sampling period of 60 seconds. Finally, the third layer
is composed of different applications that are able to
communicate between themselves:
• A native iOS application has been developed to
let the user watch and control the current state of
domotic devices through a mobile device.
• Different intelligent modules are being developed.
For instance, the ANN dining room temperature
forecasting module.
3 DATA PREPROCESSING
The data temperature signal is a sequence s
1
s
2
...s
N
of values read from temperature sensor locate at
the dinning room with a sampling period of T =
60 seconds. The signal is preprocessed using a
low-pass filter consisting in a mean computation
with 5 samples (current plus four previous sam-
ples). The sequence becomes s
0
1
s
0
2
...s
0
N
where s
0
i
=
(s
i
+ s
i−1
+ s
i−2
+ s
i−3
+ s
i−4
)/5.
After, the data is normalized subtracting the mean
¯s
0
and dividing by the standard deviation σ(s
0
) to en-
hance the ANN performance. The final sequence of
data is s
00
1
s
00
2
...s
00
N
where s
00
i
=
s
0
i
− ¯s
0
σ(s
0
)
.
The temperature signal is divided in three parti-
tions, one for training (30 240 patterns, 21 days), one
for validation (10 080 patterns, 7 days) during train-
ing and parameters setup, and another one for test the
ANN performance in an unseen data set (10080 pat-
terns, 7 days). The mean and standard deviation nor-
malization values are computed over the training plus
validation partitions. The validation partition is se-
SomeEmpiricalEvaluationsofaTemperatureForecastingModulebasedonArtificialNeuralNetworksforaDomotic
HomeEnvironment
207

quential with training partition, but the test partition
is one week ahead from last validation point.
4 NEURAL NETWORK
DESCRIPTION
ANNs has an impressive ability to learn complex
mapping functions as they are an universal function
approximator (Bishop, 1995). Therefore we decided
to begin our forecasting module using this kind of ma-
chine learning models.
Each ANN is formed by one input layer, one or
more hidden layers, and one output layer. If we are at
the time step i, the ANN input receives the hour com-
ponent of the current time, and a window of the previ-
ous temperature values s
00
i
s
00
i−α
s
00
i−2α
...s
00
i−(M−1)·α
, and
computes at the output a window with the next pre-
dicted temperature values s
00
i+1
s
00
i+2
s
00
i+3
...s
00
i+L
. The
current time is locally-encoded, which means that
we need 24 input neurons where only one is acti-
vated with 1 and others with 0. The values of the
step α, the input window size M and the output
window size L will be selected during experimenta-
tion (Figure 2 shows the ANN architecture described
here). Following this approach the ANN is used to
compute the whole future window at one time. It
is called multi-step-ahead direct forecasting (Zhang
et al., 1998; Cheng et al., 2006). In literature the
more extended approach is multi-step-ahead iterative
forecasting, that consists on train an ANN that pre-
dicts only the next value of the series, and then it-
eratively use this output as new input (Zhang et al.,
1998). The direct approach demonstrated to be better
in some tasks, but worst in others (Zhang et al., 1998).
Nevertheless due to the large values for L, between
20 and 180 minutes to be predicted, the iterative ap-
proach seems to be inaccurate.
Being o
i
the output neuron i, h
j
the hidden layer
neuron j, W
HO
i, j
the weight that connects hidden layer
neuron j with output layer neuron i, I
k
the input neu-
ron k, W
IH
j,k
the weight that connects the hidden layer
neuron j and the input layer neuron k, and g(·) the sig-
moid or logistic activation function, the computation
of the ANN could be written as:
o
i
=
∑
j
h
j
·W
HO
i, j
+ b
i
(1)
h
j
= g(
∑
k
I
k
·W
IH
j,k
+ d
j
) (2)
where b
i
and d
j
are the biases of output and hidden
layers respectively. Note that could be more than one
hidden layer.
Figure 2: Artificial Neural Network topology for tempera-
ture forecasting.
During training the ANN computes the future val-
ues, and the weights will be updated in order to mini-
mize the Mean Square Error (MSE) with a regulariza-
tion term (weight decay):
MSE =
1
2L
∑
i
(o
i
− p
?
i
)
2
+ ε
∑
w∈{W
HO
S
W
IH
}
w
2
2
where ε is the regularization term, added to avoid
over-fitting and improve the generalization of the
ANN, and p
?
i
is the ground truth predicted value.
The error back-propagation algorithm with momen-
tum term (BPm) were used to train all ANNs.
5 EXPERIMENTATION
An exhaustive exploration of ANN hidden layer
sizes, learning rate, momentum, weight decay, in-
put window step, and input window size parame-
ters has been done using a fixed output window
size of L = 180. The best configuration was α =
2, M = 30, learning rate of 0.001, momentum of
0.0005, weight decay of 1 × 10
−7
, 8 hidden layer
neurons, logistic hidden layer activation function
and linear output activation function. Using this
set of parameters, ANNs with an output window
size of L = 20,40,60,80,100,120,140,160,180 were
trained. The experimentation results will focus on
L = 60,120,180 as the best representative values of
the full experimentation. We denote each of the mod-
els with NN–060, NN–120, and NN–180 respectively.
We measure the error of the models using this two
functions:
KDIR2012-InternationalConferenceonKnowledgeDiscoveryandInformationRetrieval
208
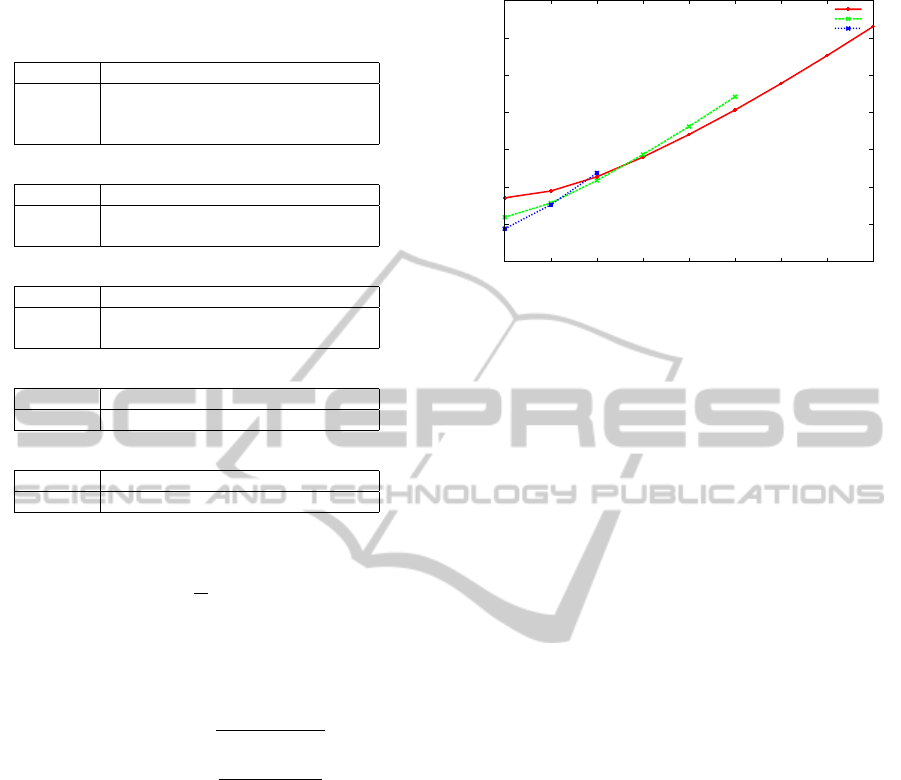
Table 1: MAE with its 95% confidence interval, measured
on validation partition over different future windows.
Future window 0–60
Model MAE Maximum error
NN–060 0.052 ±0.00093 0.625
NN–120 0.049 ±0.00087 0.576
NN–180 0.051 ±0.00082 0.626
Future window 0–120
Model MAE Maximum error
NN–120 0.094 ±0.0018 1.172
NN–180 0.087 ±0.0016 1.236
Future window 60–120
Model MAE Maximum error
NN–120 0.139 ±0.0027 1.172
NN–180 0.124 ±0.0025 1.236
Future window 0–180
Model MAE Maximum error
NN–180 0.133 ±0.0025 1.981
Future window 120–180
Model MAE Maximum error
NN–180 0.224 ±0.0045 1.981
• Mean Absolute Error (MAE):
MAE =
1
N
∑
i
|p
i
− p
?
i
| (3)
where p
i
is the predicted i-th value and p
?
i
its
ground truth.
• Normalized Root Mean Square Error (NRMSE):
NRMSE =
v
u
u
u
u
t
∑
i
(p
i
− p
?
i
)
2
∑
i
( ¯p
i
− p
?
i
)
2
(4)
where ¯p
i
is the mean value of p
i
.
The MAE value is the result of computing their
mean for each prediction sequence extracted from the
validation partition patterns. We select a slice of the
ANN output units that correspond to the future win-
dow where table rows are focused (0–60, 0–120, 60–
120, 0–180, 120–180). Additionally we computed the
95% confidence interval of MAE. The last column is
the maximum error of an output neuron on the valida-
tion partition.
Observing this table we could see how all the er-
ror measures increase with the size of the forecasting
window. The more distant in time the forecasting is,
the bigger the error is. Nevertheless, the confidence
intervals of the error are small, in the worst case it is
0.0045
◦
C. MAE errors are very acceptable achieving
in worst case 0.224
◦
C.
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
20 40 60 80 100 120 140 160 180
MAE
Window upper bound
NN−060
NN−120
NN−180
Figure 3: Plot of the MAE error computed over the mean of
forecasting windows 0–20, 0–40, 0–60, 0–80, . . . , 0–180,
using ANN models trained with L = 60,120,180.
5.1 Forecasting Mean Temperatures
In order to focus the temperature forecasting mea-
sured errors on their future use on an automatic con-
trol system, we will compute the mean temperature
forecasted by the model in the selected forecasting
window. Then we could measure the MAE value be-
tween this mean and the ground truth mean on the
same window. This values are interesting because
a rule-based system could be implemented over the
mean/max/min values of forecasted temperature.
Table 2 shows the NRMSE and MAE results of
this mean values on the validation partition. The same
conclusion as in previous section is observed. The
bigger the forecasting window is, the bigger the error
is, and, the more distant in time the window is, the
bigger the error is. Mean temperature errors are lower
or equal than absolute raw errors obtained in previous
section. Here the worst case is of 0.144 NRMSE and
0.223
◦
C MAE. In each forecasting window the bold
values are the best. To better illustrate the behavior of
each model the figure 3 shows the MAE error of the
mean temperature for forecasting windows beginning
in 0.
5.2 Ensemble of Models
In order to ensure the best performance we combine
the NN–060 model and NN–180 model producing a
new model denoted by NN–MIX. Different ensemble
approaches exists in literature (Yu et al., 2008). In this
work we decide to combine the models in a prelimi-
nary experiment following a linear combination with
the same weight to each of the models on the 0–60
forecasting window size, and only the NN–180 model
on the 60–180 forecasting window size, following this
equation:
SomeEmpiricalEvaluationsofaTemperatureForecastingModulebasedonArtificialNeuralNetworksforaDomotic
HomeEnvironment
209
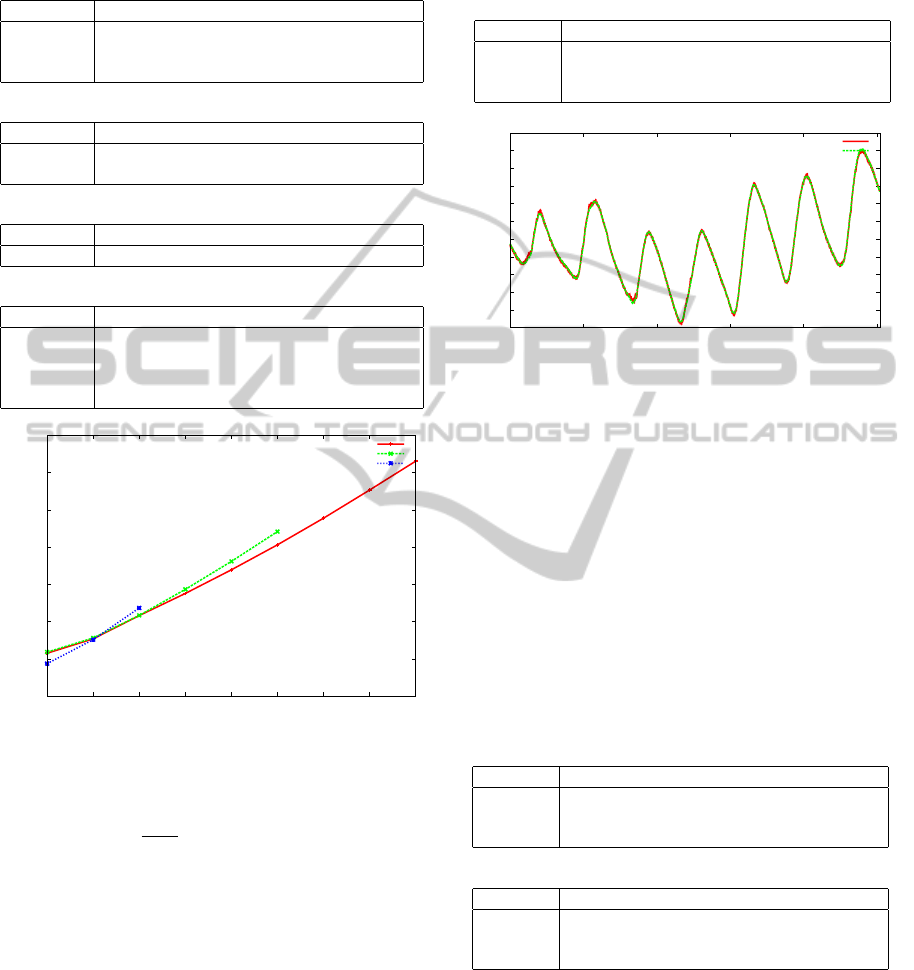
Table 2: Validation partition NRMSE/MAE on mean tem-
perature computed over different future windows.
First hour
Model 0–20 0–40 0–60
NN–060 0.011/0.018 0.019/0.030 0.030/0.047
NN–120 0.014/0.024 0.020/0.031 0.028/0.043
NN–180 0.021/0.034 0.024/0.038 0.029/0.045
Second hour
Model 60–80 60–100 60–120
NN–120 0.067/0.103 0.077/0.120 0.088/0.137
NN–180 0.060/0.094 0.069/0.108 0.079/0.122
Third hour
Model 120–140 120–160 120–180
NN–180 0.121/0.188 0.132/0.205 0.144/0.223
Full interval
Model 0–60 0–120 0–180
NN–060 0.030/0.047 – –
NN–120 0.028/0.043 0.057/0.088 –
NN–180 0.029/0.045 0.052/0.081 0.082/0.126
NN–MIX 0.027/0.043 0.052/0.081 0.082/0.126
0.00
0.02
0.04
0.06
0.08
0.10
0.12
0.14
20 40 60 80 100 120 140 160 180
MAE
Window upper bound
NN−060
NN−120
NN−MIX
Figure 4: Plot of the MAE error computed over the mean of
forecasting windows 0–20, 0–40, 0–60, 0–80, . . . , 0–180,
using NN–060, NN–120, and NN–MIX models.
o
i
=
(
o
s
i
+o
l
i
2
for 0 ≤ i < 60
o
l
i
for 60 ≤ i < 180
(5)
being o
s
i
the i-th output of the NN–060 (small model),
and o
l
i
the i-th output of the NN–180 (large model).
The combination results are shown on Table 2 and
Figure 4. As we could predict, the NN–MIX model
has a behavior comparable to NN–060 on windows of
size less than 60, and the same behavior as NN–180
for bigger windows.
5.3 Final Results
In order to do a further evaluation of the NN–MIX
model, we compute the NRMSE and MAE measures
for the mean, maximum, and minimum temperatures
Table 3: NRMSE/MAE on minimum, maximum, and mean
temperature forecasting on validation dataset and window
intervals for one, two, and three hours ahead, using the NN–
MIX model.
Window Min Max Mean
0–60 0.029/0.050 0.047/0.061 0.027/0.043
60–120 0.068/0.115 0.099/0.135 0.079/0.122
120–180 0.129/0.214 0.165/0.233 0.143/0.223
15
16
17
18
19
20
21
22
23
24
25
26
0 2000 4000 6000 8000 10000
ºC
Time (minutes)
NN−MIX
Ground Truth
Figure 5: Plot of the forecasted mean temperature versus
ground truth mean temperature using a forecasting window
of 0–60 and the NN–MIX model on the validation partition.
of each forecasting window. The results are shown
on Table 3, showing that mean and minimum temper-
ature measures achieve similar errors, and maximum
temperatures are little worst. We do the same exper-
iment using the unseen test partition. Figure 5 plots
the mean temperature forecasted for the window 0–
60 compared with the ground truth mean temperature
on validation partition.
Table 4: NRMSE/MAE on minimum, maximum, and mean
errors on test dataset and window intervals for one, two, and
three hours ahead, using the NN–MIX model. For compar-
ison purposes NN–ITE model results are shown.
NN–MIX model results
Window Min Max Mean
0–60 0.139/0.188 0.173/0.254 0.150/0.205
60–120 0.255/0.371 0.239/0.360 0.270/0.394
120–180 0.334/0.539 0.381/0.603 0.352/0.566
NN–ITE model results
Window Min Max Mean
0–60 0.402/0.605 0.164/0.257 0.275/0.441
60–120 0.605/0.996 0.519/0.888 0.567/0.956
120–180 0.727/1.249 0.717/1.260 0.723/1.260
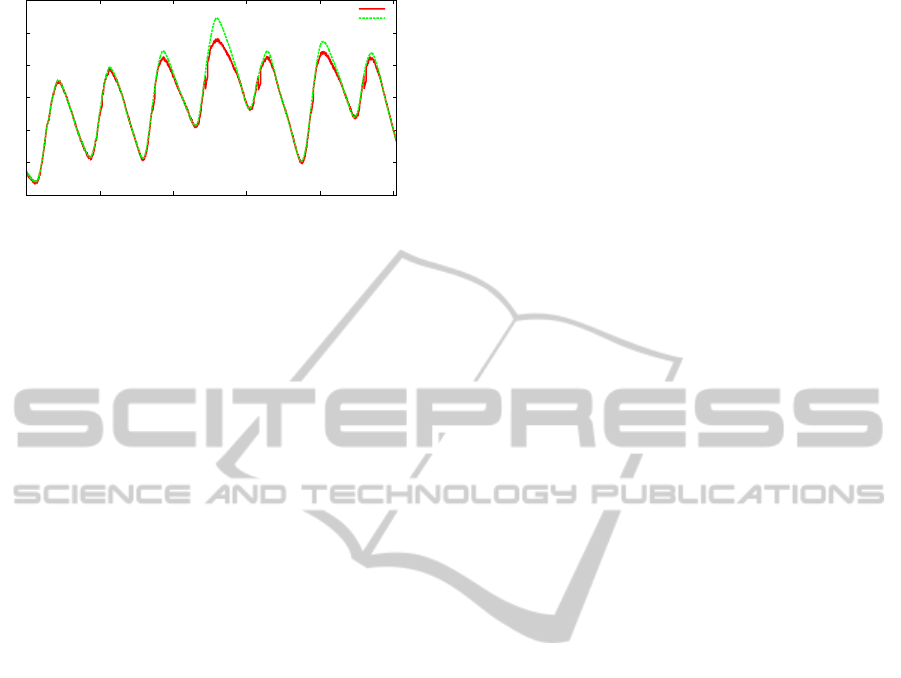
The test partition results are shown on Table 4.
Test partition temperatures are bigger than training
partition temperatures. This leads to bigger errors
on forecasted values. Figure 6 plots the mean tem-
perature forecasted for the window 0–60 compared
with the ground truth mean temperature on test par-
tition. The addition of more training data from differ-
ent months will improve the errors of the model due
to the differences of temperatures between months.
KDIR2012-InternationalConferenceonKnowledgeDiscoveryandInformationRetrieval
210
18
20
22
24
26
28
30
0 2000 4000 6000 8000 10000
ºC
Time (minutes)
NN−MIX
Ground Truth
Figure 6: Plot of the forecasted mean temperature versus
ground truth mean temperature using a forecasting window
of 0–60 and the NN–MIX model on the test partition.
For comparison purposes we trained an ANN to
predict only the next future value, building iteratively
a window of 180 minutes forecasted values (iterative
multi-step-ahead forecasting). Table 4 shows their re-
sults denoted by NN–ITE. We observe that our ap-
proach outperforms NN–ITE because ANNs trained
using a future window of size greater than one, could
update all their weights using the whole output pre-
diction, and better results are expected (Zhang et al.,
1998).
6 CONCLUSIONS AND FUTURE
WORK
The present paper has shown, in a slightly manner,
the architecture of both hardware and software CAES
system. This has been developed for the SMLhouse
project at our University, which will compete in in-
ternational events. The system is already running and
preliminary data for system validation has been ob-
tained. At the first stage, it has been developed all the
monitoring and control architecture, ensuring overall
system reliability. Regarding the intelligent control of
the house, a preliminary version of a rule-based sys-
tem has been developed .
An ANN for indoor temperature prediction has
been implemented, which seems very promising, but
it has to be applied to the rest of the subsystems. Er-
ror achieved by ANNs is little enough to be accepted
by a human being, i.e. it is not perceptible by a per-
son. The proposed ANN model achieve its goals; it is
possible to obtain predictions about maximum, min-
imum and average temperature up to 3 hours with a
MAE close to 0.6
◦
C, and a prediction from one to two
hours with a MAE less than 0.5
◦
C. Such error degree
allows us to think about the possibility of developing
a more complex intelligent module as stated before. It
will be necessary to include other parameters such as
solar intensity, external temperature, humidity, CO
2
,
etc. as inputs of the neural network to improve the
predictions. Another idea is to calculate the level of
confidence in the prediction, based on works as (Car-
ney et al., 1999). Other interesting future work will
be to replace current feed-forward ANN with a Long-
Short Term Memory (LSTM) (Graves et al., 2009)
which are a kind of recurrent neural network that is
obtaining impressive results on automatic process and
labeling of sequences due to their superior ability to
model long term dependencies.
ACKNOWLEDGEMENTS
This work was partially supported by IDIT-Santander.
REFERENCES
Bishop, C. M. (1995). Neural networks for pattern recog-
nition. Oxford University Press.
Carney, J., Cunningham, P., Bhagwan, U., and England, L.
(1999). Confidence and Prediction Intervals for Neu-
ral Network Ensembles. In IEEE IJCNN, pages 1215–
1218.
Cheng, H., Tan, P.-n., Gao, J., and Scripps, J. (2006).
Multistep-ahead time series prediction. LNCS,
3918:765–774.
Graves, A. et al. (2009). A Novel Connectionist System
for Unconstrained Handwriting Recognition. IEEE
TPAMI, 31(5):855–868.
Instituto para la diversificaci
´
on y ahorro de la energ
´
ıa
(IDAE) (2011). Practical Guide to Energy. Efficient
and Responsible Consumption. Madrid.
Kreuzer, K. and Eichst
¨
adt-Engelen, T. (2011). The
OSGI-based Open Home Automation Bus.
http://www.openhab.org.
Thomas, B. and Soleimani-Mohseni, M. (2006). Artificial
neural network models for indoor temperature predic-
tion: investigations in two buildings. Neural Comput.
Appl., 16(1):81–89.
Yu, L., Wang, S., and Lai, K. K. (2008). Forecasting crude
oil price with an EMD-based neural network ensemble
learning paradigm. Energy Economics, 30(5):2623–
2635.
Zhang, G., Patuwo, B. E., and Hu, M. Y. (1998). Forecast-
ing with artificial neural networks: The state of the art.
International Journal of Forecasting, 14(1):35–62.
SomeEmpiricalEvaluationsofaTemperatureForecastingModulebasedonArtificialNeuralNetworksforaDomotic
HomeEnvironment
211
