
A Framework for Situation Inference based on Belief Function
Theory
Ladislav Beranek
Department of Applied Mathematics and Informatics, Faculty of Economics, University of South Bohemia,
Ceske Budejovice, Czech Republic
Keywords: Information Extraction, Situation Recognition, Context Discovery, Belief Function Theory.
Abstract: The ability to identify the occurrence of a situation is the main function of context-aware systems. The
process of identifying a situation is not easy due to the uncertain nature of the processed information. We
use the belief function theory to detect specific situations on the basis of uncertain sensor data. In this paper,
we propose a framework for situation awareness based on the belief function theory which is applied to
determination of situation occurrence from uncertain sensor data. The framework consists of the situation
sensors data processing (filtering, integration) and of situation detection based on alternative frames of
discernment generation. The case study demonstrates that the proposed framework is effective and can be
used to situation detection.
1 INTRODUCTION
Context-aware systems take into account the context
of the user, i.e. data that characterizes the situation
in which the user is currently finding himself. To
determine such a situation, a number of sensors are
required and the subsequent evaluation of data from
those sensors has to be performed. By default, these
sensors operate independently. The data they
generate is then used to determine the situation in
which the user is finding himself; for example, the
user wakes up and gets up. The whole procedure of
identifying the situation occurrence lies in the
collection of reports and records of events from all
sensors in a certain period of time, the integration of
this data and its analyzing in order to obtain an
overall overview of the situation. The aim is to
assess the situation and also to predict future
development of the situation. However, there are
several problems in the processing of data from
sensors and systems for obtaining such an overview
of the situation:
Large amounts of data and reports (here we call
them evidence) are generated from different
sensors.
Data are variable in time, can be loaded with
noise.
It can be quite difficult to determine the
relationships between data from different
sensors; for example, from the perspective of
time or the delay in data transmission over the
network.
In order to determine the occurrence of a
situation, various sensors are located in different
places, for example in one household to monitor and
to collect data to determine the situation. This data
provides only symptomatic evidence and requires
appropriate analysis of these symptomatic symptoms
that can lead to a corresponding judgement about the
situation (Beranek, 2012). The problem is how to
combine and analyze these indicative evidences of
such situation to determine the occurrence of a real
situation.
In this paper, we propose an approach based on
the use of belief functions. We use the theory of
belief functions in two basic areas: to integrate the
data from the respective sensors and to construct a
frame of discernment which serves to the reasoning
about the occurrence of situation. This method of
construction of the frame of discernment is based on
the work of Shubert (Shubert, 2012). The frame of
discernment must consist of mutually exclusive
elements. Often, also in context-aware systems using
the belief function theory, the frame of discernment
is chosen inappropriately (Daniel, 2010). A classic
error is described in a paper presented by Zadeh
(Zadeh, 1984). In his work three non-exclusive
358
Beranek L..
A Framework for Situation Inference based on Belief Function Theory.
DOI: 10.5220/0004143703580361
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2012), pages 358-361
ISBN: 978-989-8565-29-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

diseases: meningitis (M), concussion (C) and brain
tumor (T) are represented as elements of the frame
of discernment
= {M, C, T}. This is not in
compliance with the requirements that the frame of
discernment should include only exclusive elements.
Such error can lead to misleading results which are
described in Zadeh’s paper. Haenni (Haenni, 2005)
presented a correction of this error. He suggested to
use, in this case, the other frame Ω created as a cross
product of the mentioned elements-diseases:
Ω = {{M,NM}×{C,NC}×{T,NT}},
where NM means no M and similarly NC means
no C and NT means no T. The frame Ω will have
eight elements. Haenni (Haenni, 2005) proved that
the choosing of proper frame eliminates the
problem. The conclusion differs substantially from
the one presented by Zadeh (Zadeh, 1984).
In context-aware systems the situation inference
is reliant on information from various sensors. But
the information from these sensors may not be
exclusive and even may display a high degree of
conflict. We used the method of alternative frames
of discernment generation based on the work
Schubert (Schubert, 2012) in the phase of situation
detection. This approach takes away the problems
with possible non-exclusive data from sensors. This
is important when this data is high conflicting. This
approach is a new and effective application of belief
functions in this area based on Schubert’s work
(Schubert, 2012).
The remainder of this paper is organized as
follows: Section 2 gives a brief overview of related
works in this area; Section 3 contains the
methodology, a description of the proposed
framework for obtaining of an overview of the
situation based on processing data from sensors;
Section 4 shows experiments and their results;
Section 5 describes conclusion and further research
plans.
2 RELATED WORK
The ability to determine the occurrence of a situation
in which the user has found himself is an essential
function for context-aware systems. This ability
depends on the activities of the various sensors and
the correct way to evaluate data from these sensors.
Evaluation of data from the sensors, because of their
nature, is not easy. Many reasoning techniques are
used to evaluate and infer the current situation.
Bayesian methods are quite popular, for example
(Ulicny et al., 2011), (Ranganathan et al., 2004).
Further techniques such as fuzzy logic (Furno et al.,
2010), also in combination with semantic web
(Ciaramella et al., 2020), or ontologies (Matheus et
al., 2003) or hidden Markov models (van Kasteren et
al., 2008) are used as well. However, these models
usually require some preliminary information.
Preferably, there is also belief functions theory used,
see for example McKeever et al., 2009), (Liao et al.,
2010). McKeever constructs sensor mass functions
and uses theory of belief function primarily for
combination of evidences. Liao tries to monitor
human activities. He proposes a three-layer lattice
structure. It is then used to combine the mass
functions derived from sensors along with the sensor
context and subsequently to infer occurrence of
situation.
The use of the belief function theory is especially
useful in situations in which we have no previous
data (lack of training data), data is very inaccurate,
and some data is missing. However, the proper
application of the belief function theory has to deal
with two problems. The first problem is the right
application of Dempster’s rule. To apply this rule
correctly, input belief functions must be independent
and reliable, i.e. obtained from reliable sources and
correctly constructed in such a way that they reliably
represent the corresponding source of evidence
(Daniel, 2010). The second problem is that data
from sensors is often non-exclusive. The
construction of the frame of discernment must
correspond to these conditions. The solution is
presented in a paper by Schubert (Schubert, 2012).
We will apply an approach suggested in this paper
for construction frames of discernment in the
situation detection phase.
3 BASIC CONCEPTS OF OUR
FRAMEWORK
The framework for situation awareness proposed in
this paper is based on the processing of the data and
tabs from various sensors. It consists of two parts, as
shown in figure 1:
1. In the first part, data from the sensors are
processed by means of filtration and data
integration;
2. In the second part, mass functions are derived,
alternative frames of discernment are
constructed, and the comparisons with adequate
frames of discernment stored in the database are
accomplished.
AFrameworkforSituationInferencebasedonBeliefFunctionTheory
359
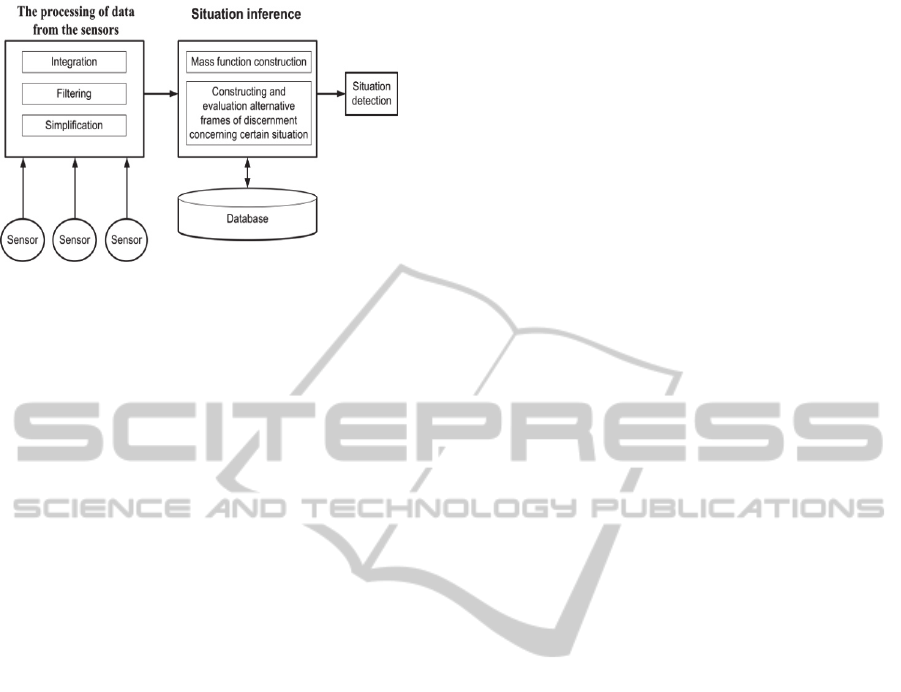
Figure 1: The framework for network security situation
awareness consists of two parts, one is to process various
events and construct the formal model of network security
situation, the other is to acquire attack patterns through
knowledge discovery and generate dynamically the
network security situation graph.
3.1 Processing Data from Sensors
Data sources used for situation detection are very
different, derived from various sensors (time sensor,
water intake, position sensor, etc.). Therefore, in the
first phase, it is necessary to convert all messages
received on the situation observed in a standard
format. In addition, these standardized records are
filtered and integrated. The aim is to simplify and
eliminate redundant records, to remove records that
do not meet certain requirements. These
requirements may be stored in the knowledge base
in the form of attribute rules and be used according
to the status of the situation. The record can be
removed; for example, in the absence of a key
attribute of the described events or when its value is
out of range and thus not relevant for the analysis of
the situation.
3.2 Construction of Alternative Frames
of Discernment and Situation
Inference
Mass functions are calculated at first. They can be
derived from sensor reliability or can be quantified
on the basis of inference rules. For example, in the
home data set, a user “usually” uses the coffee
maker when preparing breakfast and this is
quantified as 90% of the time by examining sample
occurrences of the “breakfast preparation” situation
in the data. Therefore, a mass function value of 0.9
is applied on the basis of inference rule from the
context value “coffee maker is used” to the situation
of “breakfast preparation”.
Now, we have some uncertainty about the
different aspects of a situation. This information is
expressed using established belief functions. We
have no assumption that the atomic elements are sets
of elements of the same frame, because they can
relate to different aspects of the same phenomenon
(the situation). Instead, we believe that they can be
part of various homogeneous parts of frames whose
Cartesian product will be a framework that
represents all the possibilities of the problem. Even
further, this may be revised whenever there is new
information and framework may need to be
expanded to include the possible outcomes that were
not previously known (Shubert, 2012).
Since there may be several different alternative
frameworks for each time point, we determine the
most suitable framework for resolution. We define
the fitness resolution framework to meet two
different aspects simultaneously. Hence we
construct the frames of discernment over the data
obtained from the first phase. We then choose the
most appropriate frame which has the lowest internal
conflict.
We scan the data about the situation (first part)
and, in the second part, construct alternative frames
from which we chose the most appropriate one. We
take this actual frame of discernment and process it.
We compare it with the frames of discernment saved
in the database (for example with the typical one
when the user performs an activity - “breakfast
preparation”). At the end, we deduce a description of
the situation which corresponds to the actual user’s
activity.
Thus the function of the second part of our
framework is as follows. We have two situation
data sources available for actual situation detection:
the belief functions generated from the first part on
the basis of sensor data, and the set of historical
situation descriptions. We have to determine and
extract the knowledge from these pieces of
information to perform the actual situation detection.
4 EXPERIMENTAL RESULTS
To verify the proposed framework for the situation
inference, we created simulated home environment
with six various sensors. In the first phase, we
focused ourselves on the kitchen activities. We
selected consecutive time slices describing the
“prepare breakfast” activity (see table 1).
Looking at Table 1, the situation “preparing
breakfast” is supposed to be occurring at 7.10. The
same situation continues till 7.15. The sensor tells us
that the coffee maker is in operation at 7.15. Here,
the frame of discernment = {eating, preparing
KDIR2012-InternationalConferenceonKnowledgeDiscoveryandInformationRetrieval
360

Table 1: Example of data processed within the framework.
Time Sensor events Generated frame
of discernment
Resulting
identified
situation
7.10 foodstuffs, fridge,
cook-stove,
{preparing
breakfast}
preparing
breakfast
7.15 foodstuffs, fridge,
cook-stove,
{preparing
breakfast}
preparing
breakfast
7.20 coffee maker {eating, preparing
coffee, {eating
prep. coffee}}
eating and at
the same time
preparing
coffee
7.25 dishwasher,
coffee maker
{eating, get
coffee}
eating
coffee, {eating preparing coffee}} with relevant
values of mass belief function is constructed. After
processing this data together with the data from the
database, we obtain the specification of the actual
situation with the highest value of belief function.
We are describing this process very briefly here and
on a simple example.
Our approach incorporates the context quality
information into sensor evidence by using the
construction of alternative frames of discernment
concerning situation. We also provide a mechanism
to accumulate evidence for time-distributed
situations. We demonstrate here our approach on a
simple case study. Our approach enables situation
inference with uncertain information with limited or
no need for training data.
5 DISCUSSION AND
CONCLUSION
In this paper, we propose a framework intended for
situation identification. This framework is mainly
based on the use of the belief function theory which
reflects better the uncertain character of the process
of situation detection. We describe here some results
of our initial study. In our future activities, we want
to analyze these procedures more deeply. We are
preparing more experiments with the aim to
especially improve the procedures concerning the
resulting description of the situation, i.e. procedures
pertaining to the extraction of the knowledge from
processed data from sensors and from data stored in
the database.
REFERENCES
Beranek, L., Knizek, J., 2012. The Usage of Contextual
Discounting and Opposition in Determining the
Trustfulness of Users in Online Auctions. Journal of
Theoretical and Applied Electronic Commerce
Research, vol. 7, No. 1, pp. 3450.
Ciaramella A., Cimino M., Marcelloni F., Straccia U.,
2010. DEXA'10 Proceedings of the 21st international
conference on Database and expert systems
applications. Berlin: Springer, pp. 31-45.
Daniel, M., 2010. Several Notes on Belief Combination.
In Proceedings of the Theory of Belief Functions
Workshop. Brest: ENSIETA, 2010. pp. 1-5.
Furno D., Loia V., Veniero M., 2010. A fuzzy cognitive
situation awareness for airport security. Control and
Cybernetics, vol. 39, No. 4, pp. 959982.
Haenni, R., 2005. Shedding new light on Zadeh’s criticism
of Dempster’s rule of combination. In Proceedings of
the Eighth Int. Conf. on Information Fusion,
Philadelphia, IEEE, pp. 879–884.
Liao J., Bi X., Nugent Ch., 2010. Activity Recognition for
Smart Homes Using Dempster-Shafer Theory of
Evidence Based on a Revised Lattice Structure. In
Proceeding of the 2010 Sixth Int. Conf. on Intelligent
Environments. Washington IEEE, pp. 4651.
van Kasteren T., Noulas A., Englebienne G., Krose B.,
2008. Accurate activity recognition in a home setting.
In Proceedings of 10th International Conference on
Ubiquitous Computing, South Korea, pp. 19.
Matheus C. J., Kokar M. M., Baclawski K., 2003. A Core
Ontology for Situation Awareness. In Proceedings of
Sixth International Conference on Information Fusion.
Cairns, Australia, pp. 545552
McKeever S., Ye J., Coyle L., Dobson S., 2009. Using
Dempster-Shafer Theory of Evidence for Situation
Inference. In Proceedingd of the Fourth European
Conference Smart Sensing and Context. Lecture Notes
in Computer Science 5741, pp. 149-162
Ranganathan, A. et al., 2004. Reasoning about uncertain
contexts in pervasive computing environments.
Pervasive Computing, IEEE , 3(2):6270, 2004.
Shafer, G., 1975. A mathematical theory of evidence.
Princeton University Press, Princeton, NJ.
Shubert, J., 2012. Constructing and reasoning about
frames of discernment, International Journal of
Approximate Reasoning, vol. 53, no. 1, pp. 176-189.
Ulicny, B. et al., 2011. Augmenting the Analyst via
Situation-Dependent Reasoning with Trust-Annotated
Facts. In Int. Conf. on Cognitive Methods in Situation
Awareness. Miami Beach: IEEE, pp. 1724.
Zadeh, L. A., 1984. Review of a mathematical theory of
evidence, AI Magazine, vol. 5, pp. 81–83.
AFrameworkforSituationInferencebasedonBeliefFunctionTheory
361
