A Bayesian Approach for Constructing Ensemble Neural Network
Sai Hung Cheung, Yun Zhang and Zhiye Zhao
School of Civil and Environmental Engineering, Nanyang Technological University,
Nanyang Avenue, Singapore, Singapore
Keywords: Neural Network, Bayesian Approach.
Abstract: Ensemble neural networks (ENNs) are commonly used in many engineering applications due to its better
generalization properties compared with a single neural network (NN). As the NN architecture has a
significant influence on the generalization ability of an NN, it is crucial to develop a proper algorithm to
design the NN architecture. In this paper, an ENN which combines the component networks by using the
Bayesian approach and stochastic modelling is proposed. The cross validation data set is used not only to
stop the network training, but also to determine the weights of the component networks. The proposed ENN
searches the best structure of each component network first and employs the Bayesian approach as an
automating design tool to determine the best combining weights of the ENN. Peak function is used to assess
the accuracy of the proposed ensemble approach. The results show that the proposed ENN outperforms
ENN obtained by simple averaging and the single NN.
1 INTRODUCTION
The artificial neural network (NN) is a mathematical
or computational model for information processing
based on the biological neural networks (McCulloch
and Pitts, 1943). The ensemble neural network
(ENN) can be significantly improved through
ensembling a number of NNs (Hansen and Salamon,
1990). Since this approach behaves remarkably well,
nowadays it has been widely applied in many
engineering areas.
In Bayesian data analysis, all uncertain quantities
are quantified by probability distributions, and
inference is performed by constructing the posterior
conditional probabilities for the unobserved
variables of interest, given the observed data sample
and prior assumptions (Lampinen and Vehtari,
2001). The application of Bayesian theory to NNs
was started by Buntine and Weigend (1991).
Marwala (2007) proposed a Bayesian neural
network trained using Markov Chain Monte Carlo
(MCMC) and genetic programming (GP) in binary
space. Wang et al. (2010) proposed a sequential
Bayesian learning for ENNs. This paper proposes a
method based on a Bayesian approach and stochastic
modelling. One simulated example is used to
illustrate the performance of the proposed method.
2 PROPOSED BAYESIAN
APPROACH FOR DESIGNING
ENN
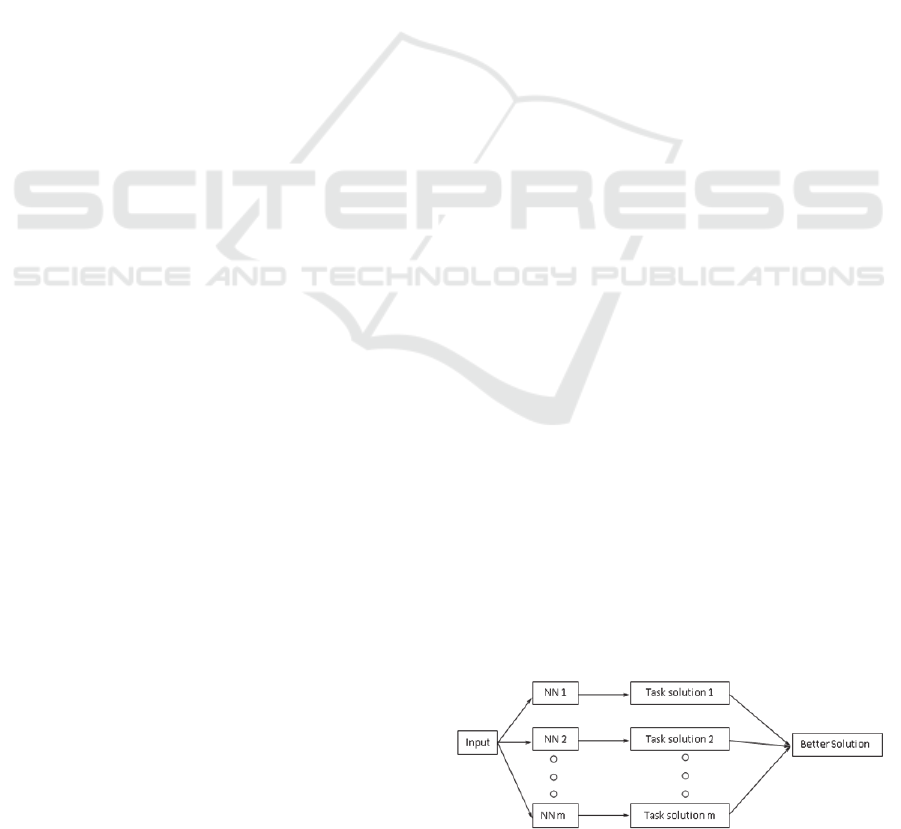
An ENN is a collection of a finite number of NNs
that are trained for the same task. Usually the
networks in the ensemble are trained independently
and then their predictions are combined (Sollich and
Krogh, 1996). The architecture of the ENN is shown
in Figure 1. The two main steps to construct an ENN
are: Step 1 - creating component networks; Step 2 -
combining these component networks in ENN.
Figure 1: The architecture of the ENN.
In Step 1, Creation of the component network
can also be divided into two steps. The first step is to
create the training data, the test data and the cross
validation data sets, and the second step is to create
the component networks. For creating the training
data, the test data and the cross validation data sets,
374
Hung Cheung S., Zhang Y. and Zhao Z..
A Bayesian Approach for Constructing Ensemble Neural Network.
DOI: 10.5220/0004147103740377
In Proceedings of the International Conference on Knowledge Discovery and Information Retrieval (KDIR-2012), pages 374-377
ISBN: 978-989-8565-29-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

some common ratio of them will be used in the
analyses. All training data are used for each
component network. To avoid the overfitting of the
component network, the cross validation data set is
used to stop the training network. The test data set is
used to verify the performance of the network and
will not be used in network training. For creating
component networks, each component network is
created several times, but the best structure will be
used in the ENN. The procedure to define the
number of hidden nodes in each component network
is similar to the method presented in Zhao et al.
(2008). The best number of hidden nodes for a
single NN is chosen to achieve the smallest training
mean squared error (MSE) for sufficient training and
smallest test MSE to avoid network overfitting.
After a set of component networks has been
created, the method to combine these networks has
to be considered. The most widely used method is to
use the equal combination weights to combine the
members of an ensemble (Hashen, 1993). This set of
outputs combined by a uniform weighting is referred
to as the simple ensemble (or simple averaging
method).
The stochastic system based framework for
Bayesian model updating presented in Beck and
Katafygiotis (1998) and part of the methodology
presented in Cheung and Beck (2010, 2012) are used
as a basis for the proposed method presented here.
For the proposed ENN, the weight of each best
component network will be calculated using the
cross validation data set or by the training data set
for comparison purpose. Without loss of generality,
for illustration, only the case where the output
variable is a scalar is considered here. The output
y(x) of the ENN is modelled as a stochastic process
in continuous input variables x given as follows:
() () ()
T
yx f x w xe=+
(1)
where f(x) is a vector with components given by the
output of the component networks corresponding to
the input variables x; the error term
is modelled
as a stochastic process in x which is chosen to be
Gaussian here with mean zero and covariance
function cov(
,
; ,) which is a
function of x
(i)
and x
(j)
with parameters and . The
weight of the component network together with
and
are treated as uncertain parameters. Given the
measured input X=[x
(1)
... x
(N)
]
T
and output data
=[y
1
...y
N
]
T
, the probabilistic information about
these parameters is encapsulated in the posterior
probability density distribution (PDF) given as
follows by Bayes’ Theorem:
1
/2 1/2
(,,| ,)
1
exp[ ( ) ( , )( )]
2
(,,)
(2 ) | ( , ) |
T
N
pw l X y
yFw lyFw
pw l
l
s
s
s
ps
-
=
-- å -
å
(2)
where
(,,)pw ls
is the prior PDF taken as uniform
here; F=[
(1)
()
f
x ...
()
()
N
fx ]
T
is a matrix with
entries given by the output or the predictor of the
component networks corresponding to the measured
inputs given in X; the (i,j) element of the covariance
matrix
(,)lså
=cov(
,
; ,). In the
globally identifiable case (Beck and Katafygiotis,
1998) where there is only one optimal solution θ
*
(called the most probable solution) maximizing the
posterior PDF of the uncertain parameters θ, it can
be shown that given a sufficient amount of data, the
posterior PDF can be well approximated by a
Gaussian distribution with mean equal to θ
*
and
covariance matrix given by the inverse of the
Hessian matrix of the negative natural logarithm of
the posterior PDF evaluated at θ = θ
*
.
For the important special case where
cov(
,
; ,) = σ
2
g(x
(i)
, x
(j)
;),
(,)lså
=
σ
2
R(l) where the (i,j) element of the matrix R(l) =
g(x
(i)
, x
(j)
; l) and g(x
(i)
, x
(j)
;) takes the form such that
R(l) approaches an identity matrix if l approaches a
zero vector. For this case, θ
*
= [w
*T
σ
2*
l
*T
]
T
can be
determined by using the proposed iterative algorithm
as shown in Figure 2. The objective function
J
of
the sub-optimization problem as shown in the figure
is given by the negative natural logarithm of
(,,| ,)
p
wlXys as follows:
2
2
1
2
(, ,)
1
ln(2 ) ln | ( ) |
22
1
()()()ln(,,)
2
T
Jw l
N
Rl
y
Fw R l y Fw p w l
s
ps
s
s
-
=
+
+- --
(3)
The solution of this optimization problem can be
obtained using Newton’s method because analytical
expression for the gradient and Hessian matrix of the
objective function can be derived. The algorithm can
be modified easily to tackle other forms of
covariance function. It is worth noting that when l
approaches a zero vector, becomes a Gaussian
white noise implying there is no probabilistic
dependence between the outputs corresponding to
different inputs for given w and
.
ABayesianApproachforConstructingEnsembleNeuralNetwork
375
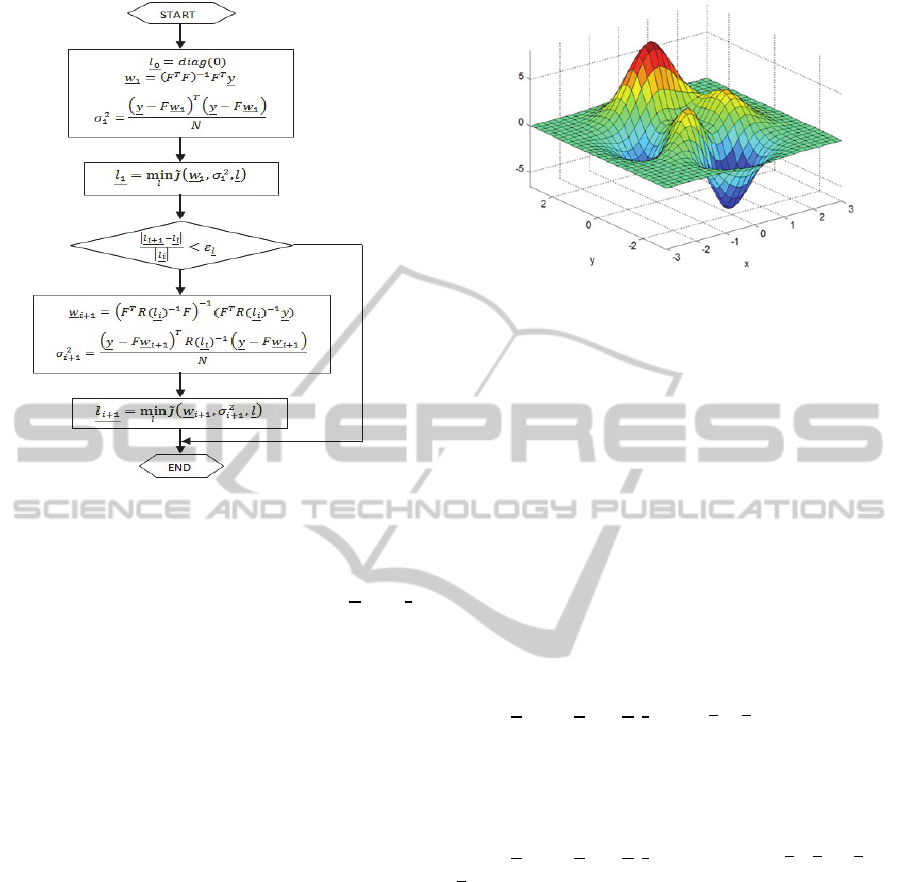
Figure 2: Iterative algorithm for determining the most
probable uncertain parameters.
Thus using the proposed method, the optimal
combined weights of component networks,
and
are given by the most probable solution and the
uncertainty in these parameters is quantified by the
corresponding posterior PDF.
3 COMPUTATIONAL
EXPERIMENTS
To verify the performance of the Bayesian based
ENN proposed in this paper, peak function is carried
out by an ENN program written in MATLAB. The
peak function, which is shown in Figure 3, is a
function of two variables and obtained by translating
and scaling Gaussian distributions. It is a typical
complex two-dimensional function as follows:
3/)5/(10)1(3
))1(()(53))1((2
222222
yxyxyx
eeyxxexZ
(4)
The peak function contaminated by additive
Gaussian white noise with mean 0 and variance 0.05
is used to generate the training data, the cross
validation data and the test data. First, 11
11
evenly distributed data along both the x-axis and the
y-axis are selected from the domain [-3, 3] as the
training data for the simulation. Two other 10
10
evenly distributed points from the same domain are
used as the cross validation data and the test data.
Figure 3: Peak function.
5 cases of ENNs will be investigated later. All
ENNs have the same input and output layers: the
number of the input nodes is 2 and the number of the
output nodes is 1. There are 3 component networks,
and the numbers of hidden nodes in the component
networks are 11, 14 and 17, respectively. Each
component network is trained 3 times randomly to
find the best weight configuration within the
network. The ENNs will then combine the
component networks with the best weight
configuration within each component network. For
the simple averaging ENN, the output of the ENNs
is combined with the simple averaging method
(denoted by Ave-ENN). The proposed Bayesian
based ENN constructed using the training data and
the error covariance function
cov(
,
; ,) = σ
2
δ(x
(i)
- x
(j)
) is denoted by
Btr-ENN and the one using the cross validation data
with the same error covariance function is denoted
by Bcv-ENN. Btrdp_ENN and Bcvdp-ENN are the
same as Btr-ENN and Bcv-ENN, respectively except
that the error covariance function
cov(
,
; ,) = σ
2
exp[-(x
(i)
-x
(j)
)
T
(x
(i)
-
x
(j)
)/l
2
]. For a fair comparison, the results using
single NNs which are used as the component
networks in the ENN are also obtained.
The statistical results on the test data set for 20
runs are shown in Table 1, in which Single 11, 14
and 17 denote the single NNs with 11, 14 and 17
hidden nodes, respectively. It can be observed that
ENNs have better accuracy than the single NNs. For
the single networks, the network with higher number
of the hidden nodes has the better performance.
When these 3 component networks combined, the
performance of ENNs becomes better than any of
the single one. Among the ENNs, Bcvdp-ENN has
the smallest mean and standard deviation (S.D.) of
MSEs for the test data, indicating the best
generalization capability and the most stable
performance. From the mean and S.D. of MSEs for
KDIR2012-InternationalConferenceonKnowledgeDiscoveryandInformationRetrieval
376

the test data, it can be seen that the proposed
Bayesian ENN outperforms both the single NNs and
the simple averaging ENN.
Table 1: Test MSE of twenty runs on peak function with
three component networks.
MSE Minimum Mean S.D.
single 11 0.3418 0.5617 0.1361
single 14 0.2485 0.3683 0.1089
single 17 0.1989 0.3013 0.1049
Ave-ENN 0.2114 0.2726 0.0419
Btr-ENN 0.1756 0.2400 0.0484
Btrdp-ENN 0.1756 0.2397 0.0484
Bcv-ENN 0.1768 0.2331 0.0431
Bcvdp-ENN 0.1766 0.2323 0.0415
4 CONCLUSIONS
This paper improves the existing ENN by the
following ways: 1) instead of using component NN
directly, a preliminary selecting process is used to
get the best component NN; 2) the stochastic system
based Bayesian is adopted to construct a
methodology to determine the weights of the
component networks by using the cross validation
data set in the ENN with error term being modelled
as a stochastic process in network input variables.
Peak function is used to verify the performance
of the proposed ENN. The results show that the
proposed Bayesian based ENN outperforms the
single NNs and the simple averaging ENN. These
results also show the potential of the proposed ENN
can be applied to other kinds of problems.
Moreover, comparison with other ensemble
methodologies is currently under investigation and
experiments with additional data sets will be carried
out. Further improvements to the proposed method
by considering the dependence of measured output
with predicted output, multiple optimal models,
improving the stochastic modelling, using advanced
stochastic simulation algorithms and coupling the
construction and combination of component
networks for prediction improvement are currently
under investigation.
REFERENCES
Beck, J. L., Katafygiotis, L. S., 1998. Updating models
and their uncertainties. I: Bayesian statistical
framework. Journal of Engineering Mechanics 124(4),
455-461.
Buntine, W. L., Weigend, A.S.1991. Bayesian Back-
propagation. Complex Systems 5, 603-643.
Cheung, S. H., Beck, J. L., 2010. Calculation of posterior
probabilities for Bayesian model class assessment and
averaging from posterior samples based on dynamic
system data. Computer-Aided Civil and Infrastructure
Engineering 25, 304-321.
Cheung, S. H. and Beck, J. L., 2012. New Bayesian
updating methodology for model validation and robust
predictions of a target system based on hierarchical
subsystem tests. Computer Methods in Applied
Mechanics and Engineering, accepted for publication.
Friedman, J. H., 1991. Multivariate adaptive regression
splines. Ann Statist 19(1): 1-82.
Hansen, L. K., Salamon, P., 1990. Neural network
ensembles. IEEE Transactions on Pattern Analysis
Machine Intelligence 12 (10), 993-1001.
Hashem, S., 1993. Optimal Linear Combinations of
Neural Networks. PhD thesis, School of Industrial
Engineering, Purdue University.
Hippert, H. S., Taylor, J. W., 2010. An evalution of
Bayesian techniques for controlling model complexity
and selecting inputs in a neural network for short-term
load forecasting, Neural Networks 23, 386-395.
Lampinen, J., Vehtari, A., 2001. Bayesian approach for
neural networks—review and case studies. Neural
Networks 14, 257-274.
Marwala, T., 2007. Bayesian training of neural networks
using genetic programming. Pattern Recognition
Letters 28, 1452-1458.
McCulloch, W. S., Pitts, W., 1943. A logical calculus of
the ideas immanent in nervous activity. Bulletin of
Mathematical Biophysics 1943; 5, 115-133. Reprinted
in Anderson & Rosenfeld 1988, 18-28.
Posada, D., Buckley, T. P., 2004. Model selection and
model averaging in phylogenetics: advantages of
Akaike information criterion and Bayesian approaches
over likelihood ratio tests. Systematic Biology 53, 793-
808.
Sollich, P., Krogh, A., 1996. Learning with ensembles:
How over-fitting can be useful, in: Touretzky, D. S.,
Mozer, M. C., Hasselmo, M. E. (Eds.), Advances in
Neural Information Processing Systems 8, Denver,
CO, MIT press, Cambridge, MA, pp. 190-196.
Wang, P., Xu, L., Zhou, S., Fan, Z., Li, Y., Feng, S., 2010.
A novel Bayesian learning method for information
aggregation in modular neural networks. Expert
Systems with Applications 37, 1071-1074.
Zhao, Z. Y., Zhang, Y., Liao, H. J., 2008. Design of
ensemble neural network using the Akaike information
criterion. Engineering Applications of Artificial
Intelligence 21, 1182-1188.
ABayesianApproachforConstructingEnsembleNeuralNetwork
377
