
Monitoring Agents in Complex Products
Enhancing a Discovery Robot with an Agent for Monitoring, Maintenance
and Disaster Prevention
Leo van Moergestel
1
, Erik Puik
1
, Dani
¨
el Telgen
1
, Hendrik Folmer
1
, Matthijs Gr
¨
unbauer
1
,
Robbert Proost
1
, Hielke Veringa
1
and John-Jules Meyer
2
1
HU Utrecht University of Applied Sciences, Utrecht, The Netherlands
2
Utrecht University, Utrecht, The Netherlands
Keywords:
Agents, Monitoring Agent, Product Life Cycle.
Abstract:
Monitoring of computernetworks, complex technical systems like aeroplanes is common practice. In this paper
we discuss the use of a monitoring agent in a product. The product itself could be any product with sufficient
hardware capabilities, but the focus is on the product enhancement by adding an embedded agent. This so-
called product agent can be a member of a multiagent system. In this way exchange of parts and subsystems
is possible. The possibilities and advantages of this concept are discussed as well as a more elaborate example
of the implementation in an experimental discovery robot.
1 INTRODUCTION
Agent technology for agile manufacturing was the
starting point of this research. In this research the
concept of a product agent was introduced. Every
product to be made starts as a software entity or agent
that is programmed to meet its goal: the production
of a single product. To be able to reach its goal this
agent knows what should be done to create the prod-
uct. This entity is called a product agent and it guides
the product along the production cells to be used for
manufacturing and it will collect all kinds of impor-
tant manufacturing data during the production pro-
cess. When the product is finished, this agent has all
the manufacturing details and this agent is still avail-
able for further use containing valuable information
about the product. The next step in this approach is to
investigate and study the roles of this product agent in
the other phases of the life cycle of the product.
In this paper we study the implementation of a
product agent that has not been used to create the
product itself, but this agent is created for a specific
phase in the life cycle of the product. First the use and
roles of agents in all phases of the life cycle are dis-
cussed as well as how agents could be implemented
for these different phases. Next we focus on the use
phase. The case study for our product agent in the
use phase is based on a discovery robot. This robot is
also introduced and globally described. After this de-
scription of the product, the embedding of the product
agent is discussed and some results of the implemen-
tation of the product agent in this complex system are
shown.
2 ROLE OF AGENTS IN THE
LIFECYCLE OF A PRODUCT
In figure 1 the life cycle of an arbitrary product is
shown. After the design, the product is manufac-
tured in the production phase, next the product is dis-
tributed. A very important phase is the use of the
product and finally the product should be recycled. In
all these phases, the product agent can play a role that
will be globally described in the next sections
Design Manufacturing Distribution Use Recycling
Figure 1: Life cycle of a product.
2.1 Design and Production
In our view the design of a product will be greatly
influenced by the individual end-user requirements.
This means that cost-effective small scale manu-
facturing will become more and more important.
In (Puik and Moergestel, 2010) and (Moergestel et al.,
2010) a manufacturing system based on a grid of
5
van Moergestel L., Puik E., Telgen D., Folmer H., Grünbauer M., Proost R., Veringa H. and Meyer J..
Monitoring Agents in Complex Products - Enhancing a Discovery Robot with an Agent for Monitoring, Maintenance and Disaster Prevention.
DOI: 10.5220/0004184500050013
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 5-13
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
cheap and versatile production units called equiplets
is described. This grid is capable of agile multipar-
allel production. In this model every single prod-
uct is guided through the production environment by
the already introduced product agent. This agent is
responsible for the manufacturing of the product as
well as for collecting relevant production information
of this product. This is normally a function of the
so-called Manufacturing Execution System (MES)
(Kletti, 2007). The result is that every product has
its own production journal in contrast to batch pro-
duction using a MES that generates one journal for a
whole batch of products. In figure 2 the agent based
manufacturing is depicted. In this figure the product
agent is hopping from equiplet to equiplet to guide the
product along the production machines or equiplets
and monitor success or failure of the production steps
(Moergestel et al., 2011). To make a smooth transition
equiplet A
equiplet A
equiplet C
equiplet B
equiplet agent
frontend A
product agent
product
agent
path
product flow
equiplet agent
frontend B
equiplet agent
frontend A
equiplet agent
frontend C
Figure 2: Product agent and equiplet agents during produc-
tion.
from design to production possible, the product agent
is designed as a co-design for the product. Because
of the fact that the same equiplets that are used in the
production phase are also used in the product design
phase, a short time-to-market can be realised. Though
this is all based on our own special production envi-
ronment, we expect this approach to be useful in other
production environments as well.
The concept of using agents for production is not
new. Among others a multiagent-based production
system is also developed by Jennings and Bussmann
(Bussmann et al., 2004). This system focuses on relia-
bility and minimizing downtime in a production line.
This approach is used in the production of cylinder-
heads in car manufacturing. The roles of the agents in
this production system differ from our approach.
2.2 Distribution
Product agents can negotiate with logistic systems
to reach their final destination. Logistic applications
based on multi agents systems already exist (Burmeis-
ter et al., 1997). Information of product handling and
external conditions, like temperature, shocks etcetera
can be measured by cheap wireless sensors and col-
lected by the guidance agent during the transport or
after arrival at the destination. The handling and ex-
ternal conditions during transport can be important
during product use, especially for product quality,
maintenance and repair.
2.3 Use
The role of the product agent during the use of the
product could focus on several topics. The first ques-
tion one should ask is: who will benefit from these
agents, i.e. who are the stakeholders. In a win win sit-
uation both the end-user as well as the manufacturer
could benefit from the information. If a product is a
potential hazard (in case of misuse) for the environ-
ment, the environment could also be a winner if the
agent is capable of minimizing the effects of misuse
or even prevent it.
2.3.1 Collecting Information
A product agent can log information about the use of
the product as well as the use of the subsystems of the
product. Testing the health of the product and its sub-
systems can also be done by the agent. These actions
should be transparent for the end-user. If a product
needs resources like fuel or electric power, the agent
can advise about this. An agent can suggest a product
to wait for operation until the cost of electric power is
low i.e. during the night.
2.3.2 Maintenance and Repair
Based on the logging information about the product
use and the use of the subsystems, an agent can sug-
gest maintenance and repair or replacement of parts.
Repairing a product is easier if information about its
construction is available. Also the use of a product or
the information about transport circumstances during
distribution can give a clue for repair. An agent can
also identify a broken or malfunctioning part or sub-
system. This could be achieved by continuous mon-
itoring, monitoring at certain intervals or a power-on
self test (POST).
An important aspect of complex modern products
is the issue of updates or callbacks in case of a lately
discovered manufacturing problem or flaw. In the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
6

worst situation, a product should be revised at a ser-
vice center or the manufacturing site. Information
about updates or callbacks can be send to the prod-
uct agent that can alert the end-user in case it discov-
ers that it fits the callback or update criteria. This is
a better solution for a callback than globally advertis-
ing the problem and alert all users of a certain product
when only a subgroup is involved.
2.3.3 Miscellaneous
Use of product agents could result in transparency of
the status of a product after maintenance by a third
party. The agent can report to the end-user what hap-
pened during repair so there is a possibility to check
claimed repairs. Of course the agent should be iso-
lated from the system during repair to prevent tamper-
ing with it. Recovery, tracking and tracing in case of
theft or loss are also possible by using this technique.
When the end-user wants to replace a certain device
by a new one, the product agent can give advice about
the properties the replacing device should have, based
on what the product agent has learned during the use
phase.
2.4 Recycling
Complex products will have a lot of working subsys-
tems at the moment the end-user decides it has come
to the end of its life cycle. This is normally the case
when a certain part or subsystem is broken. The other
remaining parts or subsystems of the product are still
functional, because in a lot of complex products the
mean times between failure (MTBF) of the subsys-
tems are quite different. The product agent is aware
of these subsystems or components and depending on
the economical value and the remaining expected life-
time these components can be reused. This could be
an important aspect of ’green manufacturing’. An im-
portant issue here is that designers should also take in
account the phase of destruction or recycling. Disas-
sembly and reuse of subsystems should be a feature
of a product for this approach to be successful.
The product agent can reveal where rare or expen-
sive material is situated in the product so this material
can be recovered and recycled. This way the prod-
uct agent can contribute to the concept of zero waste.
Zero waste is just what it sounds like - producing, con-
suming, and recycling products without throwing any-
thing away (Gunther, 2007).
3 PRODUCT TYPES
This approach of having an agent for a product could
be used on different kind of products, but one should
investigate if the final product has intelligence and
hardware to communicate with the agent. Some prod-
ucts have this by nature (computers, cell-phones); for
other products (cars, machinery, domestic appliances)
it should be a small investment. An important aspect
will be the possibility to connect to certain subsys-
tems for monitoring important events. If temperature
is an important item for the product agent, connection
to a temperature sensor or at least a place where this
temperature data is available is a must. If this con-
nection is not available, a temperature measurement
system should be added to the agent.
3.1 Where do these Agents Reside?
A product agent should stay alive or at least the infor-
mation the agent has collected and the knowledge the
agent has learned should be available under all cir-
cumstances. To accomplish this, two solutions are
available. The agent can be a mobile agent moving
from platform x to platform y as depicted in figure 3a.
The other solution requires moving data (beliefs of
the agent) from one agent to a newly created agent as
shown in figure 3b. In our case both agents should
be product agents. The second solution is much eas-
product agent
product agent
product agent
Beliefs
product agent
a)
b)
Figure 3: Mobile agent versus moving data.
ier to implement because of the fact that only trans-
port of data is required, while in the case of mov-
ing agents, the whole executable should be adapted
to the new situation. Another advantage of the sec-
ond approach is that a product agent can be added
in any phase of the life cycle. This is also what has
been done for this specific research. A product agent
was added to a system in the use phase. The biggest
challenge for implementing the approach of a prod-
uct agent or guidance agent will be in the use phase.
This is where the product is under control of the end-
user and not as during the production under control
of the manufacturer. In the latter case an agent-based
MonitoringAgentsinComplexProducts-EnhancingaDiscoveryRobotwithanAgentforMonitoring,Maintenanceand
DisasterPrevention
7
infrastructure can be implemented for the production
system or production line. The same is true for trans-
port and even disassembly of the product. In case of
the use phase, the agents should reside in a system
that is connected to the product, but should be avail-
able at the moment the product itself is broken. This
is comparable to the case of the so-called black box in
aeroplanes. There are several possibilities, depending
on the type of product:
• The agent runs on its own separate hardware that
is closely tied to the product;
• The agent runs on the hardware of the product but
stores information on a special place on the prod-
uct itself. This information can be recovered after
breakdown;
• The agent runs on the hardware of the product but
stores information on a remote system;
• The agent runs on a remote system that has a con-
tinuous connection;
• The agent runs remote on a system using a ’con-
nect when necessary’ approach.
The last two options require a stub or entry point for
the remote agent to make contact with the product
system. The connection with the environment could
be established by wired or wireless sensors or sen-
sor networks as well as computer subsystems in the
product. Interaction with humans in the environment
could be established by a messaging system or human
computer interface (HCI).
4 DISCOVERY ROBOT
This section gives details of the a discovery robot that
was built by our research group. To investigate the
implementation of the product agent during the use
phase, the product agent was embedded in this com-
plex technical system. To understand the details of the
product agent implementation, it is important to have
a global understanding of the construction and work-
ing of the discovery robot. In this section we present a
short overview of the robot capabilities, the architec-
ture, the software and an example of a result produced
by the robot system.
4.1 Robot Capabilities
The robot that will be used as a platform for the prod-
uct agent is capable of mapping a room with objects
by using a laser scanner. The robot can move by itself
using the map that has been created by the laser-scan.
It is possible to direct the robot to a certain point in its
map. The robot is also capable to avoid newly intro-
duced obstacles and other moving objects. This robot
is used as a system that will be enhanced by a product
agent.
4.2 Architecture
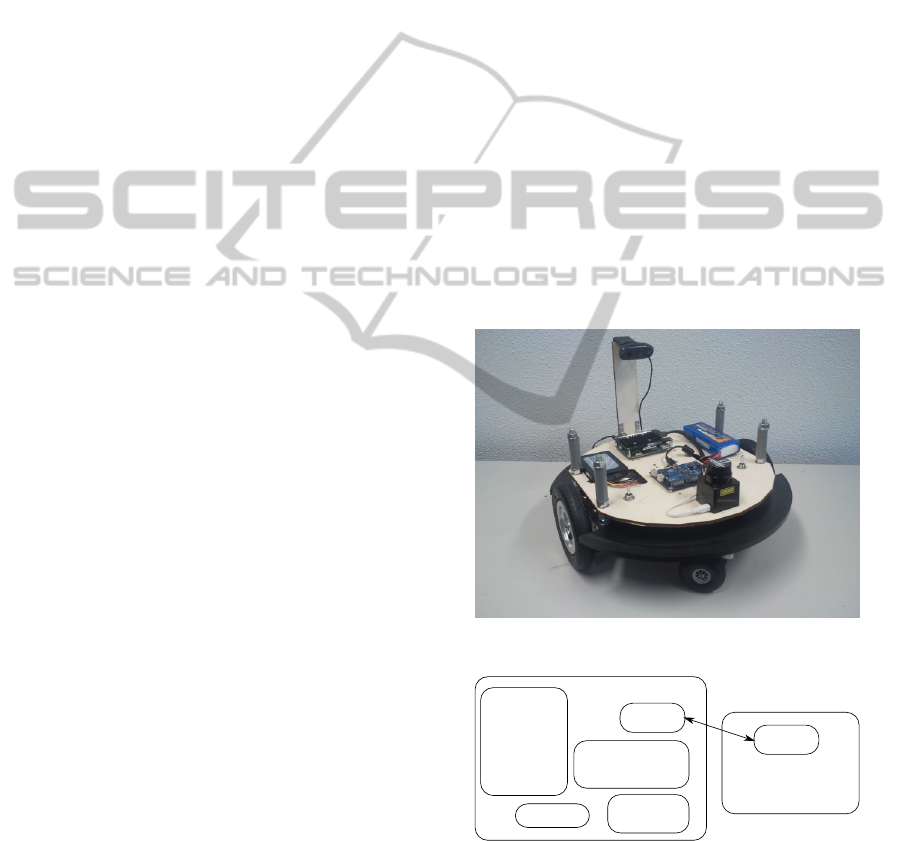
Figure 4 shows a picture of the hardware of the robot.
Two motors are connected to two wheels. Two swiv-
elling wheels are added to keep the platform in bal-
ance. Attached to the platform is the laser scanner,
printed circuit boards, a WiFi transceiver, a camera
and a set of ultrasonic sensors placed in a circle at the
edges of the platform. These ultrasonic sensors are
not yet used at this stage.
A block diagram of the robot is depicted in fig-
ure 5. An important aspect is shown in this figure. An
external computer is part of the system. This com-
puter is used to do the heavy calculation to generate
the map information, to display the map in real-time
and to plan the path the robot has to follow. A wireless
Ethernet connection (WiFi) connects the robot with
this external system.
Figure 4: Discovery robot.
WiFi
Main board
(Debian Linux)
Laser
scanner
Camera
Mechanical
Subsystem
(motors,
wheels
controller,
encoder)
External System
(Ubuntu Linux)
Robot
WiFi
Figure 5: Block diagram of the robot.
4.3 Software
The software for this robot is based on ROS. ROS
is an acronym for Robot Operating System (Quigley
et al., 2009). ROS is not really an operating system
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
8

/talker
/chatter
/listener
node
node
topic
Figure 6: Two nodes connected by a topic.
but it is middle-ware specially designed for robot con-
trol and it runs on Linux. In ROS a process is called
a node. These nodes can communicate by a publish
and subscribe mechanism. In ROS this communica-
tion mechanism is called a topic. Figure 6 shows the
relation between two nodes and one topic.
A node that produces data can publish this in one
or more topics. Other nodes interested in these data
can subscribe to one or more topics. TCP/IP is used to
actually carry out the communication. This platform
has been chosen for the following reasons:
• open source, so easy to adapt, compliant with a lot
of open source tools;
• wide support by an active community;
• huge amount of modules already available;
• nodes that are parts of ROS can live on several
different platforms, assumed that a TCP/IP con-
nection is available.
The mapping is done using SLAM. SLAM stands for
Simultaneous Localisation And Mapping (Durrant-
Whyte and Bailey, 2006). This module was already
available in ROS and fitted well to the on board laser
scanner.
4.4 Results
The results of a mapping in progress are displayed in
figure 7.
Here the robot mapped the corridors in a rather
big building with three wings. The corridors are plot-
ted as a light grey shape. The length of the longest
corridor in this map is about 50 meters. In this stage,
the robot is not yet autonomous, but is controlled by a
human operator that uses the external system and the
on-board camera to guide the robot during the map-
ping. When the map is completed, the robot is capa-
ble to navigate autonomously to a given point in the
map, even if new or moving obstacles are introduced
in the mapped environment.
5 EMBEDDED PRODUCT AGENT
This section describes the product agent and also
shows some results of its functioning.
Figure 7: 2D Mapping of a building.
5.1 Functional Requirements
The product agent that is added to the robot has the
following requirements:
• monitoring status of the system or subsystems;
• monitoring health of the system or subsystems.
The difference between health and status will be
explained in the next subsection;
• react only in case of emergency;
• the robot should operate without the agent;
• making useful data available to the outside world,
like construction details, materials used and its lo-
calisation in the robot.
5.2 Implementation
The first step in implementing this robot is to make
an overview of information available in the system.
Different types of information are considered:
1. status: is data available and of interest to the prod-
uct agent and/or the end-user;
2. health: has to do with the condition of compo-
nents that have mechanical parts or deteriorate
during use;
3. alarm: an internal condition that could result in a
troublesome situation or disaster;
4. additional information: this is the information that
was conceived in earlier phases of the life-cycle.
Because the ROS environment is already available, it
seems a natural choice to use this environment to im-
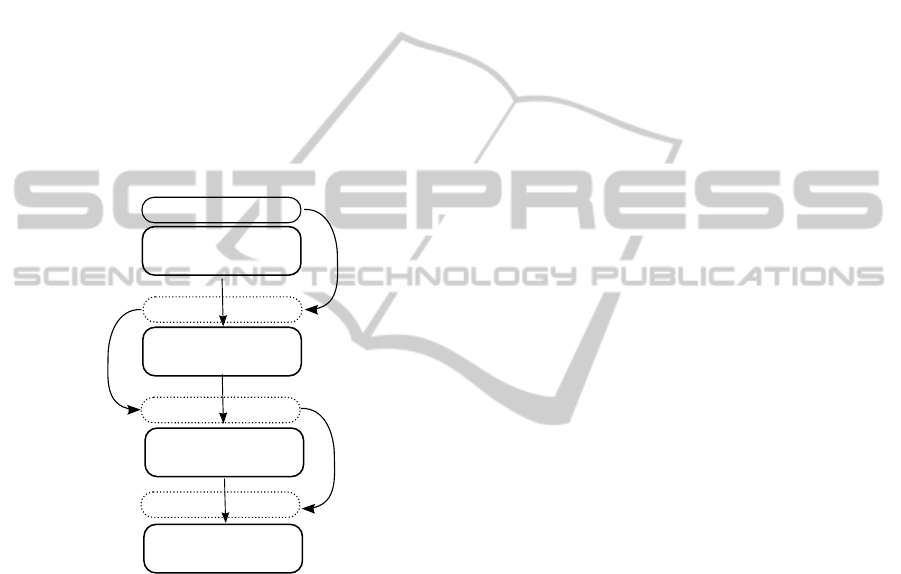
plement the agent. The agent consists of ROS-nodes,
ROS topics and some other subsystems. In figure 8
the internal modules of the agent are shown. All parts
surrounded by an ellipse are ROS nodes. The rectan-
gles represent topics. For human interfacing a small
MonitoringAgentsinComplexProducts-EnhancingaDiscoveryRobotwithanAgentforMonitoring,Maintenanceand
DisasterPrevention
9
health
status
alarm
System_logger
WiFi_monitor
R_motor_monitor
L_motor_monitor
Battery_monitor
Product Agent
Web_server
Alarm_Handler
Figure 8: Architecture of the product agent.
Product
Agent
Web_client
Data_storage
OS Shutdown
WiFi
Motors
Battery
Linux OS
Figure 9: The product agent and its environment.
web server is included. This server is capable to serve
static pages, containing technical data about the robot
as well as dynamic pages containing data collected
during use. Figure 8 shows the the internal parts of the
product agent and figure 9 shows the product agent in
its the environment. The product agent interacts with
its environment. The agent gets its information from
the robot and its operating system. The agent will log
this information and can also display information on
a web browser (web client) by using the aforemen-
tioned webserver. A shutdown can be performed in
case of a certain alarm condition.
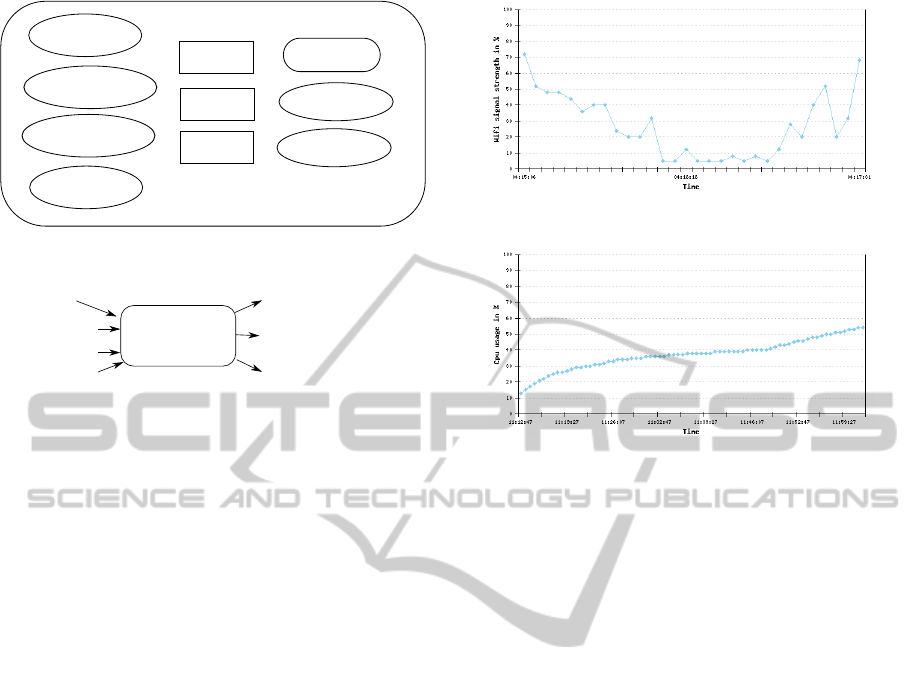
5.3 Monitoring Status
The monitoring function is an important aspect of the
product agent. In our prototype a selection of pos-
sibilities was made. A node will monitor the use of
the motors and this will be available to subscribers of
the health topic. The status topic is comparable to the
health topic, but here information is made available
that is not a result of the wear and tear of for example
mechanical parts or of the de-charging of the battery,
but is a result of measurements of interesting data like
the strength of the WiFi signal. There is one topic
that can trigger a node that will issue a system shut-
down. This topic is called the alarm topic. Apart from
these nodes, the agent can also retrieve its information
directly from the Linux environment. Commands are
available to get the CPU-load and memory usage. The
pseudo filesystem /proc offers also a wealth of tech-
nical information that can be useful for the product
agent. Examples of what can be retrieved from the
product agent are plots displayed in the following two
figures. Figure 10 shows a picture of the strength of
Figure 10: Strength of the WiFi signal.
Figure 11: CPU load.
the WiFi signal. The robot first moved away from the
wifi access point and then returned towards the wifi
access point again. The plotted data show a global
decreasing and again an increasing trend but there are
also strong fluctuations. These fluctuations are nor-
mal and due to all kinds of reflections and interference
that occur in an indoor environment. In figure 11 the
load of the processor is plotted. This curve is quite
smooth and shows that the available processor power
is adequate to operate the robot platform.
5.4 Monitoring Health
In the robot there are two candidates for monitoring
the health. The motors and the battery. The battery
should be monitored because of the fact that, like al-
most all rechargeable batteries, it can be re-charged
and de-charged a finite amount of times and informa-
tion of its remaining charge is valuable information to
the end-user that operates the robot. In figure 12 the
status of the battery is plotted during 90 minutes of
operation of the robot. A steady decrease is shown as
might be expected.
5.5 Alarm Conditions
In this section an alarm condition will be described.
The fact that the type of battery that is used in the
robot should never be completely discharged gives
rise to such an alarm condition. When the charge ca-
pacity drops below 10% a system shut-down action
should be triggered. By shutting down the system,
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
10
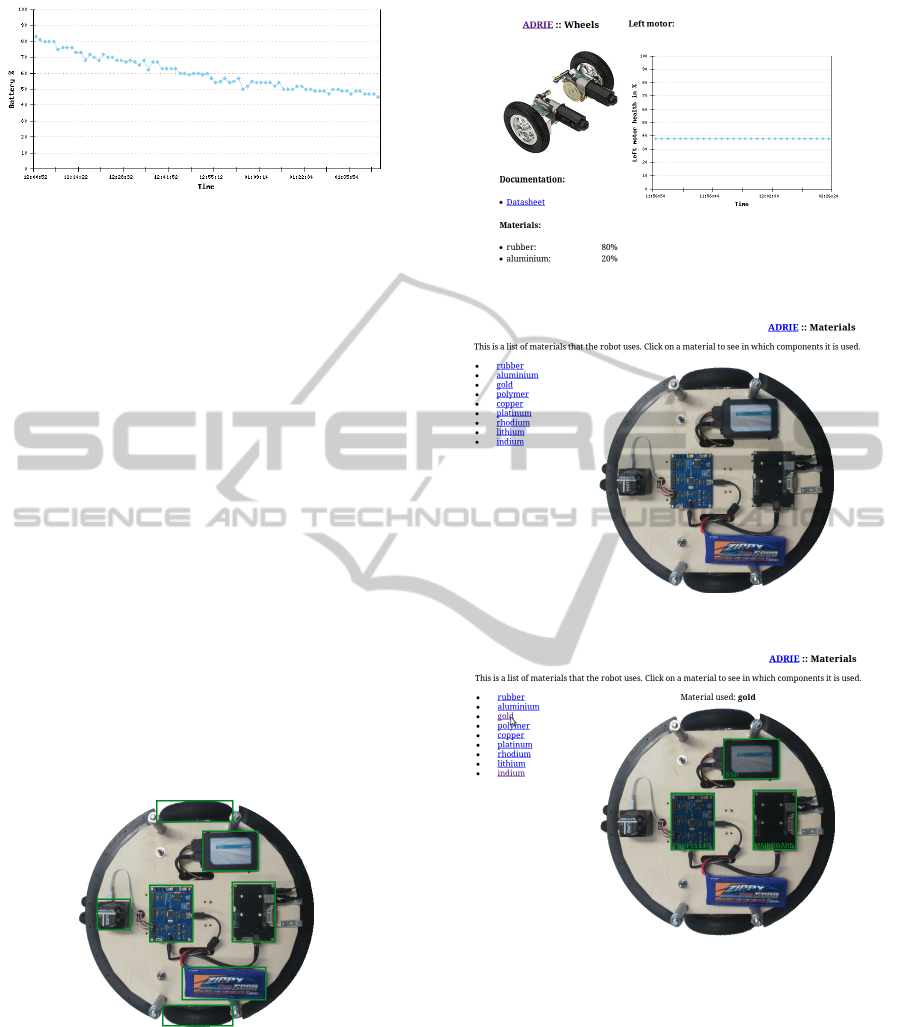
Figure 12: Charge status of the battery.
the discharge of the battery will stop, thus prevent-
ing the loss of a rather expensive component. To im-
plement this feature an Analog to Digital Converter
(ADC) should be available to check the status of the
battery.
5.6 Extra Functionality
The extra functionality that is offered by our imple-
mentation is embedded documentation and a mapping
of materials and components that are of interest dur-
ing the recycle phase. The information is offered us-
ing the same web-interface as was used in the moni-
tor section previously discussed. The documentation
is comparable to printed documentation that could be
bundled with any device. This includes a user manual,
a technical manual and a maintenance manual includ-
ing a trouble shooting section.
In figure 13 a webpage is displayed showing the
subsystems of the robot. This allows the user to select
a subsystem to get more dertailed information about
that specific subsystem. Important information for the
recycle phase is also offered using the web interface.
Figure 13: Discovery robot.
Two different approaches are implemented. Using the
web interface, one could point at any part of the robot
and receive information about the ’ingredients’. An
example is given in figure 15. Here the wheels are se-
lected and as a response the information about the ma-
terial available in these parts is displayed (figure 14).
The materials as well as other relevant information
is displayed. Another approach is presented in fig-
Figure 14: Motor and wheel subsystem.
Figure 15: Materials in the robot.
Figure 16: Where is the gold hidden?
ure 15. A list of interesting materials is presented and
by clicking on an item, the subsystems containing this
material are highlighted as shown in figure 16, where
the subsystems containing gold are shown.
These examples only show the interface designed
for human users. The information is also available in
a machine readable form using XML.
MonitoringAgentsinComplexProducts-EnhancingaDiscoveryRobotwithanAgentforMonitoring,Maintenanceand
DisasterPrevention
11

6 RELATED WORK
The work on ROS played a very important role in
this research. By using ROS we had a stable and
well developed platform for our robot. The use of
proven modules prevented reinventing solutions to al-
ready solved problems. The work on discovery robots
is huge, (Wnuk et al., 2006) and (Blazovics et al.,
2011) show some developments focussing on multi-
agent and swarm solutions. Agents for distribution,
logistic applications and product manufacturing al-
ready exist (Paolucci and Sacile, 2005). In most sit-
uations agents represent human operators or negotia-
tors. Jennings and Bussmann introduce the concept of
a product agent, in their terms workpiece agents, dur-
ing the production. These agents do not however per-
form individual product logging. The use of a product
is also studied by observing and/or interviewing end-
users (Nielsen and Levy, 1994) (Nielsen and Mack,
1994). Some software applications do connect with
their originating company to report the use by end-
users.
Several proposals and implementations of includ-
ing monitoring and documentation within the product
itself are made and implemented. Burgess (Burgess,
1998) (Burgess et al., 2002) describes Cfengine that
uses agent technology in monitoring computer sys-
tems and ICT network infrastructure. In Cfengine,
agents will monitor the status and health of software
parts of a complex network infrastructure. These
agents are developed and introduced in the use phase
of this infrastructure and focus on the condition of the
software subsystems. In our approach this monitoring
function for hardware and software is the role of the
product agent but that role has been played already by
an agent during the manufacturing phase where valu-
able information that can be useful to the end-user has
been collected. Actually this product agent in the use
phase is not necessarily the same software entity that
played the role of product agent during production,
but the belief base of the product agent is kept intact
and handed over to a new incarnation of the product
agent.
In (Hamilton et al., 2007) an integrated diagnos-
tic architecture for autonomous underwater vehicles
is described. In this work the focus is on an intelligent
system for system diagnostics. The architecture uses
a variety of domain dependent diagnostic tools (rule-
base, model-based methods) and domain independent
tools (correlator, topology analyzer, watcher) to first
detect and then diagnose the location of faults. This
work could be used and combined with the model
present in the current paper, because the artificial in-
telligence based techniques can applied in the product
agent. Our work expands the idea of diagnosis and
related data to the whole lifecycle of a product. By
using this same agent again in the final phase of the
life-cycle, component reuse and smart disassembly is
a very important aspect when it comes to recycling of
rare or expensive building material. The status of the
quality of used sub-parts is available from and pre-
sented by the product agent.
In (Ashton, 2009) the concept of the ’Internet of
Things’ is explained by the first user of the term ’In-
ternet of Things’. The main idea of this concept is that
the content of Internet is not only built and used by
humans and therefore largely depending on humans,
but the content will also be built by things connected
to the Internet that are programmed to do so. The
work presented in the current paper shows a possible
technique to implement this concept of the ’Internet
of Things’.
7 DISCUSSION
In this paper the focus was on implementing a prod-
uct agent in a complex product. This product was a
discovery robot but could have been any other tech-
nical system. For every system the requirements for
a product agent should be specified. However some
global specifications are applicable for every system.
The choices for monitoring subsystems made in this
research were limited only to a few due to the fact that
a proof of concept was the goal of this research. The
actions the agent can perform are in this case display-
ing and storing system status and system health sta-
tus as well as system design and technical data. The
agent is not influencing the robot itself however one
alarm condition is implemented resulting in a system
shut-down. It is not a difficult task to expand the ca-
pabilities of the agent. The robot itself will be further
developed. For the product agent a wide variety of fu-
ture enhancements is possible, especially when prod-
uct agents of a certain type of product are united in a
multiagent system:
• A model that builds a failure overview of subsys-
tems. This way an accurate insight in the relia-
bility of subsystems and components can be ob-
tained. This model only works if a huge amount
of product agent are participating.
• On behalf of the end-user, a product agent can re-
port component failure and suggest or order re-
placement parts.
• An interesting model to implement the previ-
ous feature could be a marketplace in cyberspace
where product agents can negotiate with other
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
12

product agents about exchanging parts.
In all these enhancements special attention should be
paid to security and the protection of privacy of the
end-users of product agent enhanced systems. An im-
portant aspect is the fact that the agent should store its
information at a safe place in case the robot hardware
will fail. In our case this is the remote system where
the agent has the possibility to store important data.
8 CONCLUSIONS
Product agents can play an important role in every
part of the life cycle of a product. An important prop-
erty of these agents is that they should have no direct
impact on the product or system they are living in.
However useful information should be collected and
in case of disaster, these agents should keep a log of
the events leading to the disaster.
Product agents can be a virtual digital equivalent
of a product and this concept will be an enabling tech-
nology in implementing the internet of things.
The concept presented here is a natural evolu-
tion of the concept of using agents during produc-
tion. However in case of products made by production
technology not based on agent technology, a product
agent can be added afterwards, as described in our
case study. The information that could have been
collected during design and production is added af-
terwards and will play a role in the recycle phase or
maintenance during use phase.
The ROS platform proved to a very good plat-
form to implement the product agent. This is because
of the fact that the data-communication infrastructure
between nodes is already implemented in a way that
helps a lot in both the design and the implementation
of the product agent.
REFERENCES
Ashton, K. (2009). That ’the internet of things’ thing. RFID
Journal, (22 july).
Blazovics, L., Varga, C., Csorba, K., Fehr, M., Forstner,
B., and Charaf, H. (2011). Vision based area dis-
covery with swarm robots. Second Eastern European
Regional Conference on the Engineering of Computer
Based Systems, ecbs-eerc, pages 149–150.
Burgess, M. (1998). Cfengine as a component of computer
immune-systems,. Proceedings of the Norwegian In-
formatics Conference.
Burgess, M., Hagerud, H., Straumnes, S., and Reitan, T.
(2002). Measuring system normality. ACM Transac-
tions on Computer Systems (TOCS) Volume 20 Issue
2, pages 125–160.
Burmeister, B., Haddadi, A., and Matylis, G. (1997). Appli-
cation of multi-agent systems in trafc and transporta-
tion. IEEE Proceedings on Software Engineering 144
(1), page 5160.
Bussmann, S., Jennings, N., and Wooldridge, M.
(2004). Multiagent Systems for Manufacturing Con-
trol. Springer-Verlag, Berlin Heidelberg.
Durrant-Whyte, H. and Bailey, T. (2006). Simultaneous lo-
calization and mapping (slam): Part i the essential al-
gorithms. Robotics and Automation Magazine 13 (2),
pages 99–110.
Gunther, M. (2007). The end of garbage. Fortune.
Hamilton, K., Lane, D., Brown, K., and Taylor, J. (2007).
An integrated diagnostic architecture for autonomous
underwater vehicles. Journal of Field Robotics,
(24(6)):497–526.
Kletti, J. (2007). Manufacturing Execution System - MES.
Springer-Verlag, Berlin Heidelberg.
Moergestel, L. v., Meyer, J., Puik, E., and Telgen, D. (2010).
Simulation of multiagent-based agile manufacturing.
CMD 2010 proceedings, pages 23–27.
Moergestel, L. v., Meyer, J., Puik, E., and Telgen, D. (2011).
Decentralized autonomous-agent-based infrastructure
for agile multiparallel manufacturing. ISADS 2011
proceedings, pages 281–288.
Nielsen, J. and Levy, J. (1994). Measuring usability: pref-
erence vs. performance. ACM.
Nielsen, J. and Mack, R. (1994). Usability Inspection Meth-
ods. John Wiley & Sons.
Paolucci, M. and Sacile, R. (2005). Agent-based manufac-
turing and control systems : new agile manufacturing
solutions for achieving peak performance. CRC Press,
Boca Raton, Fla.
Puik, E. and Moergestel, L. v. (2010). Agile multi-parallel
micro manufacturing using a grid of equiplets. IPAS
2010 proceedings, pages 271–282.
Quigley, M., Gerkey, B., Conley, K., Faust, J., Foote, T.,
Leibs, J., Berger, E., Eheeler, R., and A., N. (2009).
Ros: an open source robot operating system. Open-
Source Software workshop of the International Con-
ference on Robotics and Automation (ICRA).
Wnuk, K., Fulkerson, B., and Sudol, J. (2006). A scal-
able architecture for multi agent vision based robot
scavenging. American Association for Articial Intelli-
gence.
MonitoringAgentsinComplexProducts-EnhancingaDiscoveryRobotwithanAgentforMonitoring,Maintenanceand
DisasterPrevention
13
