
An Agent-based Framework for Intelligent Optimization
of Interactive Visualizations
Pedro Miguel Moreira
1,2
, Lu
´
ıs Paulo Reis
2,3
and A. Augusto Sousa
4
1
ESTG-IPVC, School of Technology & Management, Polytechnic Institute of Viana do Castelo, Viana do Castelo, Portugal
2
LIACC-Artificial Intelligence and Computer Science Lab., Univ. of Porto, Porto, Portugal
3
EEUM-School of Engineering, Univ. of Minho-DSI, Campus de Azur
´
em, 4800-058 Guimar
˜
aes, Portugal
4
INESC-TEC / DEI - Faculty of Engineering, Univ. of Porto, R. Dr. Roberto Frias, 4200-465 Porto, Portugal
Keywords:
Optimization, Multi-Agent Systems, Visualization.
Abstract:
Interactive visualization of virtual environments is an active research topic. There is a multiplicity of appli-
cations such as simulation systems, augmented and mixed reality environments, computer games, amongst
others, which endlessly demand for greater levels of realism and interaction. At every stage of the process,
including modeling, image synthesis, transmission and navigation, there are identifiable circumstances which
may compromise the achievement of high quality solutions for the posed problems. For many of these prob-
lems, an effective use of optimization tools can play a major role in order to achieve solutions with better
quality. Within this context, an innovative optimization architecture is presented regarding to two major prin-
ciples. The first principle comprises the possibility to integrate, with reduced effort, the optimization tools with
existent applications and systems. Thus, we propose an agent-based framework where the optimization appli-
cation may operate as an independent process in respect to the visualization application where communication
is achieved by means of a specifically developed high-level message based protocol. The second principle
establishes on the utilization of a class of intelligent optimization methods, known as metaheuristics, which
major distinguishing quality is their great level of problem-independence, thus, enabling a wider application.
The paper describes conducted experiments and presents results that demonstrate the utility and efficacy of the
proposed framework.
1 INTRODUCTION
There are many visualization related tasks in the con-
text of virtual environments that pose problems which
may benefit from the adoption of optimization tools.
Although, the works found in the literature typically
tend to embed optimization deeply in the application.
Such course of action conducts, as a result, to design
and development efforts that are likely to have a lim-
ited reuse, besides the context for which they were
taken.
In this paper we introduce an agent based opti-
mization framework aiming to provide visualization
related problems the ability to interact with an opti-
mization agent in order to obtain optimized solutions.
The target applications are those that include some
kind of hard problems, e.g. combinatorial optimiza-
tion, for which there is not an efficient algorithm to
achieve optimal solutions.
A key requirement of such agent-based framework
is to provide tools to attain, as much as possible, a
seamless integration to existing visualization appli-
cations or related algorithms. Thus, a minimal re-
design or re-code effort is expected in order to make
use and take benefit of such tools. Besides, the agent
based architecture innately qualifies for remote opera-
tion with respect to the optimizer and the applications.
Communication and interoperability is achieved via a
high-level message protocol over a standard (or exis-
tent) communication infrastructure (e.g. a computer
network with TCP/IP). The remote operation capabil-
ities open a wide range of application scenarios such
as the deployment on heterogeneous target platforms
(e.g mobile) or a better load balancing between op-
timization and visualization tasks using a distributed
architecture, as depicted by Figure 1.
The herein presented agent-based framework en-
deavors applicability and utility for a wide range of
distinct problems with reduced effort and significant
levels of reuse. As a result, the strong decoupling
154
Moreira P., Reis L. and Sousa A..
An Agent-based Framework for Intelligent Optimization of Interactive Visualizations.
DOI: 10.5220/0004185301540159
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 154-159
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

Optimizer I
(agent)
Optimizer II
(agent)
Visualization
Application II
(agent)
Visualization
Application I
(agent)
Figure 1: Agent-Based Optimization Architecture.
between the optimization process and the problem
comes into a major requirement. Ultimately, the
framework endeavors the application with a mini-
mal amount of domain specific knowledge. To fulfill
such requirements it is established on general purpose
intelligent optimization methods, specifically meta-
heuristics, that are made available through optimiza-
tion agents. Metaheuristics have several interesting
features(Blum and Roli, 2003), that can be summa-
rized as folllows: they guide the search process mak-
ing use of techniques ranging from basic local search
to complex learning processes; they are defined at a
high level of abstraction, thus they are not problem-
specific; they can usually find an optimal or near-
optimal solution in bounded time; they may use forms
of memory, thus benefiting from acquired search ex-
perience; they make use of randomized processes in
order to promote diversification and to increase ro-
bustness; and they are often inspired by natural phe-
nomena (biological, physical, ethological, etc).
2 FRAMEWORK DESIGN
This section introduces the agent-based framework
design methodology, stating its main principles, goals
and requirements. The main requirements of the pro-
posed optimization framework are based on the fol-
lowing observations:
• There are many problems related to visualization
and rendering tasks that can benefit from the use
of optimization. Some of these problems are dif-
ficult in the sense that there is not a known algo-
rithm that can obtain optimal solutions efficiently.
• In the visualization and computer graphics do-
mains, researchers often develop their own opti-
mization systems. This happens mainly because,
as there is not any generic framework, it turns eas-
ier to develop a good optimization system from
scratch. However, having such a generic op-
timization system shall enable the developer to
test using different optimization methodologies
for each visualization problem.
• When used, optimization techniques are tightly
and deeply entangled in the visualization or ren-
dering algorithms resulting in an increased intri-
cacy of them. As this course of action does not
promote code and design reuse, bigger efforts are
required to test different optimization techniques
and to apply similar optimization techniques to
new problems.
• Graphical applications are regularly computation-
ally intensive. Moreover, optimization applica-
tions are also computationally intensive. There-
fore, the separation of the visualization from the
optimization tasks may be a way to improve the
overall performance. These tasks may be exe-
cuted at different machines (or cores) enabling the
the workload to be distributed and increasing the
overall performance thus.
As a result, and in order to overcome the afore-
mentioned problems and limitations, the proposed
methodology has the following fundamental princi-
ples, which will be further developed in the next sec-
tions respecting to the design and implementation.
The optimization process must:
• Be as independent as possible from the applica-
tion domain to permit its applicability to a wide
range of problems;
• Provide a conceptual decoupling from the visual-
ization application;
• Be implemented as autonomous agents; provide
with suitable interoperability and communication
mechanisms;
• Provide a set of algorithms and tools to make pos-
sible to test and compare the application of differ-
ent algorithms and parameters;
• Permit the easy integration and reuse of new opti-
mization algorithms and modules.
3 FRAMEWORK
IMPLEMENTATION
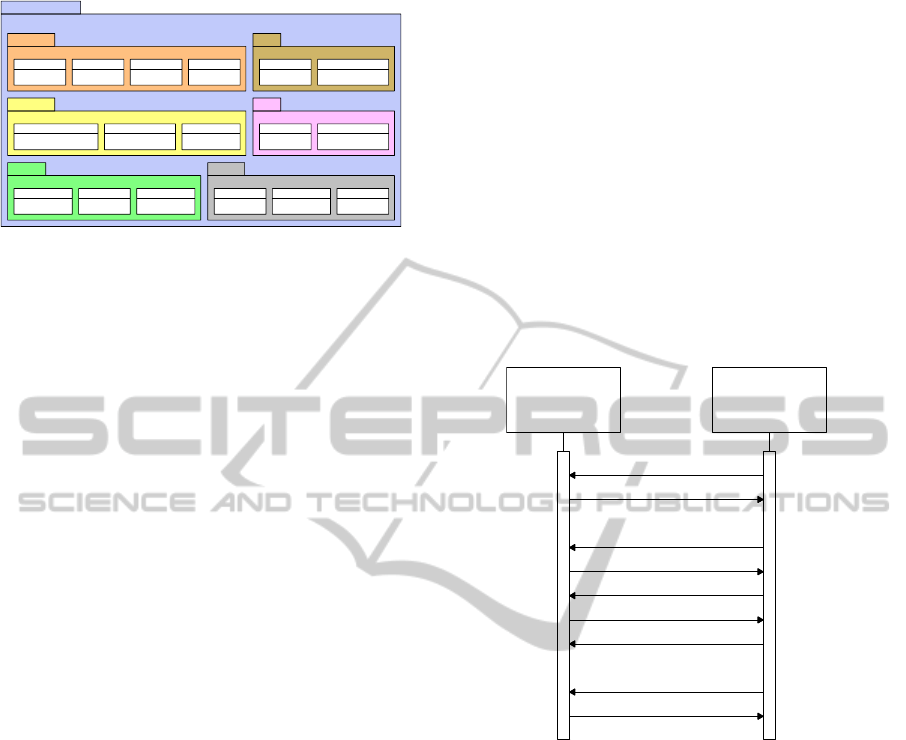
The framework core architecture is composed of six
core sets of classes, in respect to their responsibility
on the optimization process. The proposed and im-
plemented architecture is depicted in Figure 2. A de-
scription of each set of classes follows.
MetaHeuristics Classes. The MetaHeuristics set of
classes is defined the different metaheuristics al-
gorithmic templates. These classes are explicitly
designed to do not have a particular representation
of the problem. They delegate on other classes
to perform generic actions, such as neighborhood
AnAgent-basedFrameworkforIntelligentOptimizationofInteractiveVisualizations
155
IOMFramework
O
p
erators
Metaheuristics
Data
Problem
Utility
iomGA iomHCiomSA
iomTerminatoriomCoolScheduler
...
...
iomIndividual iomRNG iomParser
iomProxyProblemiomProblem
...iomMove iomPopulation
Communication
iomClientiomServer
Figure 2: Core sets of classes.
selection, mutation, cross over, or termination cri-
teria. Implemented and available classes include
algorithmic templates for single point metaheuris-
tics, concretely Hill Climbing and Simulated An-
nealing(Kirkpatrick et al., 1983; Cern, 1985), and
also for a population based metaheuristic - Ge-
netic Algorithms(Holland, 1975). Variations to a
given metaheuristic can be achieved by instanti-
ating them with operators performing distinct be-
haviors or strategies. New metaheuristic algorith-
mic templates can be easily integrated into the
framework by inheriting from the abstract base
Metaheuristic class.
Operator Classes. Operators are mid level classes
which implement a vast set of components and
actions required by metaheuristics. Examples are
neighborhood explorers, termination criteria and
selection mechanisms. It is provided a set of ab-
stract template classes for each of these operators
together with a set of concrete classes implement-
ing commonly used operators.
Data Classes. This set of classes is designed to hold
of the basic data structures such as fitness rep-
resentation, individuals (solutions are treated as
individuals with an associated fitness value) and
moves. They have to be implemented in depen-
dence to the problem. Usual data representations,
such as vectors, are provided. Data classes are not
intended to be used as algorithmic components
and therefore they do not have any specific meth-
ods or functionality than those required related to
data handling and basic (problem dependent) op-
eration.
Problem Classes. Problem classes are deliberately
designed apart from the Metaheuristics to enable
an easy integration with an external application or
agent. They can be thought as the communica-
tion gateway between the optimizer and applica-
tion agents. They have three fundamental respon-
sibilities: hold a state of the problem; handle the
messages interchanged between the optimizer and
application; and evaluate solutions.
Communication Classes. These classes provide the
system with communication capabilities. The im-
plemented classes make use of TCP/IP sockets
and implement a custom communication protocol.
Utility Classes. In addition to the main core classes,
the framework also provides the user with a set of
utility classes such as random number generation,
statistics, parsing, etc.
As mentioned before, a relevant and innovative
feature of this optimization framework is concerned
to the separated and autonomous execution of opti-
mizer and the application. Optimizer and application
are agents that can be executed on different machines
given that they are interconnected by some network
infrastructure.
Optimizer
Agent
(act as server)
Application
Agent
(act as client)
<connect>
<connected>
<problem> [params]
<notfinal> [solution]
<continue> [evaluation]
<final> [solution]
<disconnect>
<bye>
<reoptim>
Figure 3: Communication Protocol.
A simple message protocol was designed in order
to support inter operation between the two classes of
agents (Figure 3). The protocol was intended to be
architecture independent, so it does not limit its ap-
plicability. The application agent acts as a client for
optimization purposes and initiates the connection by
sending a <connect> to the optimization agent, that
acts as a server. The optimizer agent responds with
a <connected> message, acknowledging the connec-
tion. The application agent then requests optimization
by means of a <problem> message encompassing pa-
rameters a problem description.
4 Experiments: Optimization of
Multiple View Selection
RoboCup was created as an international research and
education initiative, aiming to foster artificial intel-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
156

ligence and robotics research, by providing a stan-
dard problem, where a wide range of technologies
can be examined and integrated (Kitano et al., 1997).
RoboCup Rescue project focus on urban disaster res-
cue. It aims at promoting research and development
by involving multi-agent team work coordination.
RoboCup Rescue competitions can be difficult to
monitor and visualize as they comprise a complex and
dynamic environment (Certo et al., 2006).
Multi view visualizers intend to enable users and
team developers with a more effective understanding
of the on going action, since it is expected to auto-
matically provide a set of distinct views, selected in
order to optimize their relevance with respect to the
understanding of the evolving simulation.
Selecting multiple views in virtual environments
is interesting to many other applications. As, for in-
stance, virtual museums or tourism in order to gener-
ate a best set of views over a set of relevant objects, or
to generate paths for virtual exploration. Another rel-
evant example is virtual cinematography, in order to
automatically position, select and move virtual cam-
eras.
The best set of views can be formulated as an op-
timization problem and it was chosen to conduct a
first set of experiments in order to test and validate the
previously described agent-based optimization frame-
work.
4.1 Problem Formulation
In the context of RoboCup Rescue, the best multi-
ple view problem can be informally stated as follows
(Moreira et al., 2006). In an urban rescue environ-
ment there are m visualization agents that can obtain
views over the scene. The problem is to find the set
of k views that better describes the simulation at each
moment. The visualization agents are controllable in
the sense that one can affect their viewing parameters.
In order to formulate this problem as an optimization
problem, we developed a simple model for estimating
the quality of a multi-view. The devised multiview
quality is a function of the visibility, relevance, re-
dundancy and eccentricity of the entities represented
in the set of selected views. Thus, the corresponding
optimization problem can be formalized as follows:
MAXIMIZE:Q(MV ) =
=
k
∑
j=1
n
∑
i=1
Vis(e
j
i
) · Red(e
i
|MV ) · (W
1
.Rel(e
i
) −W
2
.Ecc(e
j
i
))
E = {e
1
,... e
n
};V = {v
1
,... v
m
}
v
i
= f (
~
Pos
i
,
~
V D
i
,
~
VU P
i
,FoV
i
) i ∈ {1, ...,m}
MV = {sv
1
,...,sv
k
} where MV ⊂ V and sv
i
6= sv
j
∀i 6= j
In the given formulation, E denotes the set of n
entities that have relevance in the scene (buildings,
agents, etc) and V is the set of different views (equals
the number of agents/entities with viewing capabili-
ties). Each view is characterized by usual camera pa-
rameters, as position
~
Pos
i
, view direction
~
V D
i
, rela-
tive camera orientation
~
VUP
i
and field of view FoV
i
.
A multi-view, MV , comprises a set of k distinct
selected views (sv) from V .
The problem is to find the optimal MV set, with
appropriate view parameters, that better describes the
rescue scenario given a quality metric. We developed
a quality Q metric using the following criteria (note
that e
j
i
denotes the visual properties of an entity e
i
in
a image obtained by the view j). The parameters W 1
and W 2 denotes constants used to adjust the relative
weight of relevance and eccentricity.
Visibility: Vis(e
i
j
). This feature relates to the visibil-
ity of the relevant entities (e.g. the visible area).
Several factors contribute to an entity’s visibility
such as the distance to the viewpoint, size, relative
orientation, and also by how much partial occlu-
sion it suffers from other objects.
Relevance: Rel(e
i
). A measure of how relevant is
the entity for the purpose of the visualization.
For example, if tracking emergency situations, a
building on fire has a greater relevance than an un-
affected building. The intrinsic importance of an
object is also considered, e.g. hospitals, fireman
headquarters, schools have more relevance than
ordinary buildings.
Redundancy: Red(e
i
|MV ). It is expected that the
multiple set of views describe as much as possi-
ble distinct situations occurring during the simu-
lation. Thus, redundant views over the same enti-
ties are penalized.
Eccentricity: Ecc(e
i
j
). A measure on how distant to
the center of the image an object is displayed.
This criterion has a perceptual foundation based
on the observation that an user will focus atten-
tion to image centered entities rather than to those
in more peripherical regions.
An expected multi-view is shown in Figure 4. As
it is depicted, regions with very intense ongoing res-
cue operations are shown with greater detail. Simulta-
neously other ares covered by wider views configured
in order to get a more comprehensive picture of (an
area) of the rescue scenario.
Using larger sets of views may be also of interest,
for instance, for surveillance centers, allowing to have
a better coverage of the ongoing operations either in
coverage either in detail. The above general problem
formulation was used in the experimental setup with
some simplifications. Namely, it was made W 2 = 0,
AnAgent-basedFrameworkforIntelligentOptimizationofInteractiveVisualizations
157
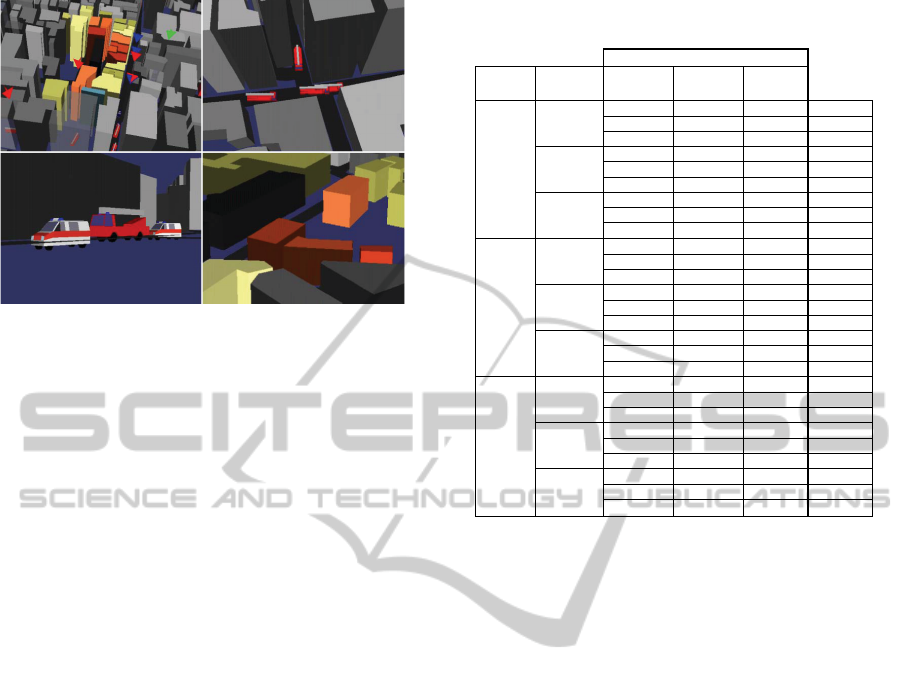
Figure 4: A multiview of a typical rescue scenario.
i.e. eccentricity was not considered, and agents were
provided with omnidirectional viewing abilities as it
is typical for RoboCup Rescue robots. Visibility was
evaluated as approximately proportional to the inverse
distance from the viewing entity to the viewed object,
accounting for maximimum visibility of all entities
near than 50 meters and null visibility for objects far
than 500 meters. This model, although not complete,
seems adequate with the viewing parameters used in
RoboCup Rescue operations.
4.2 Experimental Setup
In order to test the applicability of the optimization
methodoly and supporting architecture in respect to
visualization problems, preliminary tests were con-
ducted under the RoboCup Rescue domain in order to
optimize a set of views over a rescue simulation sce-
nario. For the purpose, simple RoboCup Rescue visu-
alization problems were used. These problems were
set up using distinct numbers of rescue entities (with
distinct abilities) and different numbers of agents with
viewing capabilities. Three different scenarios were
configured with respectively 500, 200 and 100 agents
with viewing abilities. For each of these scenarios
three different problem instances were tested in or-
der to find the best set of 4, 10 and 20 views. Each
problem instance was solved by three different meta-
heuristics: Hill Climbing (HC); Simulated Annealing
(SA); and Genetic Algorithms (GA).
Each of the problems was solved using an evalua-
tion function ignoring eccentricity as was told before.
The evaluation function (Equation 1) uses visibil-
ity, relevance and redundancy. Redundancy is used
here in order to consider only the best view of each
entity as its global contribution to the evaluation func-
tion. Accounting for redundancy, has the purpose to
have a better coverage of the rescue arena, namely
by avoiding a selection of a set of similar views (cor-
Table 1: Experimental results using the second evaluation
function.
Numberofentities
Number
ofviews
Algorithm 500 200 100
3099.96 1290.33 678.62
MEAN
3102.03 1291.53 679.55
MAX
HC
2.03 0.69 0.85
STDEV
3099.86 1289.34 679.55
MEAN
3102.97 1291.93 679.55
MAX
SA
3.82 3.18 0.00
STDEV
3101.10 1291.69 679.55
MEAN
3103.13 1291.93 679.55
MAX
20
GA
3.99 0.22 0.00
STDEV
2646.48 1170.16 593.94
MEAN
2654.90 1170.60 594.25
MAX
HC
10.17 0.60 0.36
STDEV
2650.63 1170.16 594.12
MEAN
2654.90 1170.60 594.25
MAX
SA
3.24 0.60 0.28
STDEV
2653.75 1170.60 594.25
MEAN
2654.90 1170.60 594.25
MAX
10
GA
2.58 0.00 0.00
STDEV
2206.53 892.94 442.80
MEAN
2207.21 892.94 442.80
MAX
HC
0.62 0.00 0.00
STDEV
2206.75 892.94 442.80
MEAN
2207.21 892.94 442.80
MAX
SA
0.62 0.00 0.00
STDEV
2207.21 892.94 442.80
MEAN
2207.21 892.94 442.80
MAX
4
GA
0.00 0.00 0.00
STDEV
responding to spatially close agents) focused on the
same entities.
MAXIMIZE:Q(MV ) =
k
∑
j=1
n
∑
i=1
Vis(e
j
i
) · Red(e
i
|MV ) ·W
1
· Rel(e
i
)
(1)
A set of initial experiments was performed in or-
der to tune the algorithms inherent parameters. For
the Hill-Climbing algorithm, a random neighbor ap-
proach was used with the neighborhood being gen-
erated by changing one of the viewing agents by an-
other. For Simulated Annealing, the same neighbor-
hood was used and an exponential cooling sched-
ule with an exponential ratio of 0.99 was used. For
Genetic Algorithms, an elitist selection mechanism
(keeping the best half of the population), single point
random crossover, and 10% of mutation probability
were used.
4.3 Experimental Results
A synthesis of the obtained results with the aforemen-
tioned evaluation function (Equation (1)) is presented
in Table 1 according to the described experimental
setup. The table displays the maximum (max), mean
and standard deviation (sd) values of five complete
experiments for each problem instance and algorithm.
Results analysis demonstrate that genetic algorithms
tend to achieve better global results, even using a sim-
ilar CPU time (GA parameters were configured in or-
der to use approximately the same CPU time as SA).
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
158

Simulated annealing is also able of achieving better
results if compared to the used hill-climbing.
0
1000
2000
0 1000 2000 3000 4000 5000
Figure 5: Graphical depiction of the achieved solution using
the second formulation for a problem with 500 20, where ∆
represent the selected viewing agents.
A graphical depiction of the solution is shown in
Figure 5. It can be concluded that the selected view-
ing agents are now spread around and able to cover
almost all the rescue arena. The set of solutions tend
to cover the most relevant regions without (or, at least,
less) repetition of the focused areas. Achieving good
solutions for this problem is difficult mostly because
the multi view quality is a sum of interdependent
parcels. Results also demonstrated that the frame-
work is able of optimizing best multiple view prob-
lems and instances with different dimensions with re-
spect to the number of rescue entities and viewing en-
tities. Another conclusion is that the choice for sim-
pler metaheuristics, such as hill climbing, can achieve
good results. However, slightly different formulations
may lead to poor performance of this simpler algo-
rithm in respect to the quality of the achieved results.
5 DISCUSSION AND
CONCLUSIONS
We have described an agent-based intelligent opti-
mization framework designed to tackle several com-
plex problems within the visualization and rendering
domain.
Concurrently we have endorsed as a design goal
a high level of independence between the problem
solver and application, whic has been achieved intel-
ligent optimization (e.g. metaheuristics) as the core
of optimization engine.
The conducted experiments and results demon-
strate the suitability of the proposed approach
As future work it is intended to extend the pro-
posed framework with more optimization modules
such as Tabu Search (Glover, 1986), Ant Colony
Optimization (Dorigo and Stutzle, 2004) or Particle
Swarm Optimization (Kennedy and Eberhart, 1995).
A more challenging goal is to integrate capabilities
to negotiate among a community of distinct optimiza-
tion agents (e.g. providing distinct optimization meth-
ods) in order to obtain the best solution for a given
problem or set of problems. The application of the
proposed framework to other relevant problems, such
as the automatic path advice (And
´
ujar et al., 2004)
leading to assisted exploration of scenes within the
context of virtual environments is also envisioned.
REFERENCES
And
´
ujar, C., V
´
azquez, P., and Fair
´
en, M. (2004). Way-
finder: Guided tours through complex walkthrough
models. Computer Graphics Forum, 23(3):499–508.
Blum, C. and Roli, A. (2003). Metaheuristics in combinato-
rial optimization: Overview and conceptual compari-
son. ACM Computing Surveys, 35(3):268–308.
Cern, V. (1985). A thermodynamical approach to the travel-
ing salesman problem. Journal of Optimization The-
ory and Applications, 45(1):41–51.
Certo, J., Cordeiro, N., Reinaldo, F., Reis, L. P., and Lau,
N. (2006). Advances in Artificial Intelligence, vol-
ume vol. 26 of Research in Computing Science, chap-
ter FCPx: A Tool for Evaluating Teams’ Performance
in RoboCup Rescue Simulation League, pages 137–
148. National Polytechnic Institute.
Dorigo, M. and Stutzle, T. (2004). Ant Colony Optimiza-
tion. MIT Press.
Glover, F. (1986). Future paths for integer programming
and links to artificial intelligence. Computers & Op-
erations Research, 13(5):533–549.
Holland, J. H. (1975). Adaption in natural and artificial
systems. The University of Michigan Press, Ann Har-
bor.
Kennedy, J. and Eberhart, R. C. (1995). Particle swarm
optimization. In Proceedings of IEEE International
Conference on Neural Networks, pages 1942–1948.
Kirkpatrick, S., Gelatt, C. D., and Vecchi, M. P. (1983).
Optimization by simulated annealing. Science,
220(4598):671–680.
Kitano, H., Asada, M., Kuniyoshi, Y., Noda, I., Osawa, E.,
and Matsubara, H. (1997). RoboCup: A challenge
problem for AI. AI Magazine, 18(1):73–85.
Moreira, P. M., Reis, L. P., and de Sousa, A. A. (2006).
Best multiple-view selection: Application to the visu-
alization of urban rescue simulations. IJSIMM - Inter-
national Journal of Simulation Modelling, 5(4):167–
173.
AnAgent-basedFrameworkforIntelligentOptimizationofInteractiveVisualizations
159
