
Group Formation and Knowledge Sharing in Pedestrian
Egress Simulation
Kyle D. Feuz
1
and Vicki H. Allan
2
1
Electrical Engineering and Computer Science, Washington State University, Pullman, Washington, U.S.A.
2
Computer Science, Utah State University, Logan, Utah, U.S.A.
Keywords:
Coalition Formation, Pedestrian Simulation, Multi-agent Systems.
Abstract:
Pedestrian simulation has been a topic of research for several decades, especially in regards to pedestrian
egress. Only recently, though, have researchers begun to consider the effects that groups have upon pedestrian
egress. Both empirical studies and simulation models predict a decrease in pedestrian speeds when pedestrians
travel in groups. In this study, we show that this decrease in speed does not necessarily correspond to an
increase in egress time as additional factors such as the amount of knowledge gained through the formation of
groups must be considered. The sharing of route costs helps pedestrians maintain proximity to each other and
under certain circumstances, pedestrian egress times are actually improved by the formation of groups. We
also show that the inclusion of communication costs, sharing knowledge, and group decision-making all have
a strong impact on predicted egress times.
1 INTRODUCTION
In recent years, accurate pedestrian simulation has
become an important research topic (Santos and
Aguirre, 2004; Hoogendoorn and Bovy, 2004; Pan,
2006; Helbing and Johansson, 2009). Pedestrian sim-
ulation models can be employed in the design of safe
facilities, validation of fire codes, and the automatic
tracking and surveillance of pedestrians in live video
feeds (Antonini et al., 2006). Real-world experiments
are too dangerous and too expensive to be a practi-
cal way of learning about egress efficiency. For this
reason, simulation models have been developed to
demonstrate crowd behavior in an emergency. Unfor-
tunately, these systems currently fail to capture many
important characteristics of pedestrian behavior such
as group formation and information sharing.
In coalition formation theory, a coalition will only
form if the utility achieved by the agents in the coali-
tion is greater than the utility each agent could achieve
alone (Shehory and Kraus, 1998). This assump-
tion of individual rationality is common for multi-
agent systems (Russell and Norvig, 2010). In pedes-
trian egress, pedestrians frequently move together in
groups. From the above assumptions, the utility of
pedestrians should be greater by joining a group than
if they were to travel as individuals, yet most of the
literature indicates that group formation has a nega-
tive effect on flow rates, average speed, and egress
times (Moussa¨ıd et al., 2010; Qiu and Hu, 2010; Yang
et al., 2005; Zhao et al., 2008). From this data, two
logical conclusions can be drawn, given that individ-
uals do form coalitions. First, the utility of pedes-
trians during egress is affected by more factors than
just egress time. Such factors may include emo-
tions, altruism, social influences or stress. Several
researchers have considered this perspective (Bosse
et al., 2011; Hoogendoorn et al., 2010; Kułakowski
and Gawro´nski, 2009; Ozel, 2001). Second, other
benefits are gained so that the overall egress time is
not always negatively affected. Such benefits may
include information sharing or stress reduction. In
this paper, we describe a new pedestrian simulation
model with special consideration of group formation,
group decision-making, and information sharing. We
show that these factors can have a significant impact
on egress times and, in certain situations, egress time
can be improved through the formation of groups.
2 RELATED WORK
Several researchers have found negative effects on
flow rates, and average speed when group movement
is considered. Moussaid et al. conduct empirical
357
D. Feuz K. and H. Allan V..
Group Formation and Knowledge Sharing in Pedestrian Egress Simulation.
DOI: 10.5220/0004197003570364
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 357-364
ISBN: 978-989-8565-38-9
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

studies to determine several group parameters includ-
ing size, structure formation, and speed (Moussa¨ıd
et al., 2010). The average speed is found to decrease
with increasing group size. Similarly, Qiu develops a
framework for group modeling in (Qiu, 2010) which
predicts decreased flow rates for pedestrian groups.
Initially, the simulation model predicts an increase in
flow rate as group size increases. As group size con-
tinues to increase, however, the flow rates decrease.
Both Moussaid and Qiu use a similar idea of repre-
senting group interactions through the use of a social
cohesion force which simulates group members’ de-
sire to maintain a close proximity to each other. Nei-
ther model, however, addresses the issues of route se-
lection and information sharing in a group setting or
the cost of communication.
Ji and Gao consider the effect of multiple lead-
ers with perfect evacuation route knowledge (Qingge
and Can, 2007). In their simulation model, they find
that including more leaders increases the egress ef-
ficiency, in terms of total egress time, up to a cer-
tain saturation point, after which including more lead-
ers decreases the egress efficiency (Qingge and Can,
2007). This occurs because, as the number of leaders
increase, more pedestrians receive conflicting direc-
tions from multiple leaders which in turn hinders their
ability to quickly egress from the building. Murakami
et al. conduct a similar test using fire drills in a simu-
lated model (Murakami et al., 2002). Leaders can in-
struct evacuees to either follow them or to take a cer-
tain route. In their experiments, the dedicated leaders
are known beforehand and given additional informa-
tion regarding which exits to take. We study the more
general case where leaders are not known nor are they
given special training prior to the simulation.
Yang and Zhao et al. use a simulation model
to measure the effect of grouping upon egress time
(Yang et al., 2005; Zhao et al., 2008). They classify
grouping as either spatial or directional (Zhao et al.,
2008). Spatial grouping relates to individuals’ desire
to be close physically. Directional grouping relates to
the desire of individuals to move in the same direction
as others. Their model indicates that spatial grouping
is detrimental to egress efficiency. However, direc-
tional grouping is found to increase the egress effi-
ciency. This is one of the few papers that show any
benefit to grouping. We are interested in showing that
even spatial grouping can lead to additional benefits.
Tsai et al. have developed a sophisticated model
for simulating pedestrian egress with family groups
and authority figures (Tsai et al., 2011). Their model
includes pedestrians with imperfect knowledge of the
layout, children and parent pedestrians, and trained
authority pedestrians. They point out that most pre-
vious simulators do not accurately model pedestrian
egress because the agents are omniscient and do not
suffer from the effects of fear or stress. Their model
shows that egress times are significantly impacted
when pedestrians have imperfect knowledge, seek to
maintain a group formation, and experience the ef-
fect of stress or fear. Their model is still unrealis-
tic, however, because they do not include any time
penalty for the sharing of knowledge. Additionally,
the group model used by Tsai et al. is for families
where the children do not participate in the decision-
making process.
3 OUR MODEL
Our research study is performed using the Pedestrian
Leadership and Egress Assistance Simulation Envi-
ronment (PLEASE), which we developed for this pur-
pose. PLEASE is built upon the multi-agent modeling
paradigm where each pedestrian is represented as an
individually rational agent capable of perceiving the
environment and reacting to it. In PLEASE, pedes-
trian agents can perceive obstacles, hazards, routes,
and other agents. The agents are capable of basic
communication to allow for the formation and disso-
lution of coalitions and the sharing of knowledge. The
agents use a two tier navigational module to control
their movement within the simulation environment.
The high-level tier evaluates available routes and se-
lects a destination goal. The low-level tier, based
on the social force model (Helbing and Johansson,
2009), performs basic navigation and collision avoid-
ance. The social force model is selected for the low-
level tactical navigation for four main reasons: it is
simple to understand and implement, it is widely used
in many simulation models, it successfully reproduces
many crowd phenomena, and it has been validated us-
ing actual pedestrian data (Kretz et al., 2008; Helbing
and Johansson, 2009; Moussa¨ıd et al., 2010; Luber
et al., 2010). Due to space constraints, we do not go
into the details of the social force model here but refer
the readers to (Feuz, 2011; Helbing and Johansson,
2009; Moussa¨ıd et al., 2010)
3.1 Route Selection
PLEASE uses the concept of decision points to fa-
cilitate pedestrian route navigation. A decision point
is defined as a point in the building at which an agent
must decide upon the next location in the route. These
points may be placed at arbitrary locations, but typi-
cally decision points are placed at doorways and in-
tersections. When exiting from a building, pedestri-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
358

ans navigate from one decision point to another. By
only placing decision points at doorways and inter-
sections, the placement of the decision point does not
require the pedestrian to pass through an area which
they would not normally pass through when navigat-
ing from one area of the building to another.
Several different route selection algorithms are
implemented in PLEASE. For this paper, we focus
on two different route selection algorithms, a local
route selection algorithm (Feuz and Allan, 2012a) and
a trained route selection algorithm (Feuz and Allan,
2012b) which are explained below. We use these two
route selection techniques to compare differences in
egress times when pedestrians have different amounts
of knowledge about the building. The local route se-
lection algorithm does not require any prior knowl-
edge of the building as it uses only locally observable
information. The training algorithm allows pedestri-
ans to know the route costs for decision points with
which they are familiar. This knowledge can then po-
tentially be shared with other pedestrians.
3.1.1 Local Route Selection
The local route selection algorithm estimates the cost
of exiting via a given decision point based upon sev-
eral locally observable characteristics of the point. In
this paper, we use the distance, corridor width, room
signs, and congestion characteristics when estimating
costs. These characteristics have been found to work
well for a variety of building layouts (Feuz, 2011).
3.1.2 Trained Route Selection
The training algorithm allows agents to experience
multiple simulation runs in a building during which
time the agents may learn the expected costs to dif-
ferent decision points. This information is stored in
the agent’s model of the building. More training pro-
vides agents with more knowledge about the building,
allowing for more effective route planning. In this
study, we restrict the learning to distance information.
This is done to facilitate the sharing of knowledge be-
tween group members by enforcing a common cost
metric, as discussed in section 3.4.
3.2 Group Formation
PLEASE allows for pedestrians to walk in groups.
These groups may be formed to share knowledge,
request aid, relieve stress, or interact socially. In
PLEASE, groups are more than just individuals mov-
ing in the same direction. Being a member of a group
implies communication, agreement, and a desire to
remain close together. Pedestrian groups may be of a
static or dynamic nature.
Similar to (Qiu, 2010; Moussa¨ıd et al., 2010), we
represent groups using an additional cohesive force
applied between group members. Pedestrians in a
group seek to maintain a certain proximity to visi-
ble group members. This makes sense because one
pedestrian cannot maintain a certain proximity to
another pedestrian unless the location of the other
pedestrian is known. When turning the corner pedes-
trians might temporarily lose sight of one another.
When this happens, they continue in the same direc-
tion and as the other pedestrians also turn the corner
they are able to reconnect.
3.2.1 Static Group Formation
Static groups can be formed at the beginning of the
pedestrian simulation. These groups represent re-
lationships, which are defined outside of the simu-
lation such as family, friend, or business relation-
ships. Static groups do not change throughout the
simulation: new members cannot be added and cur-
rent members are only removed when they exit the
building. Rather than require the user to define each
group manually, PLEASE uses user-defined parame-
ters to automatically create groups at the start of the
simulation. Empirical studies have found that pedes-
trian group sizes tend to be small and follow a zero-
truncated Poisson distribution(Moussa¨ıd et al., 2010).
This distribution can be approximated by adjusting
the parameters controlling group formation.
3.2.2 Dynamic Group Formation
Dynamic groups can be formed throughout the sim-
ulation. An agent may seek to join or leave a group
at any time during the simulation, but joining a group
requires the consensus of the group members. Pedes-
trian agents use utility theory when deciding whether
to join a group and whether to accept newgroup mem-
bers. The two actions each have separate utility func-
tions. We refer to the utility of joining a group as the
agent’sindividualutility function. We referto the util-
ity of accepting new group members as the group util-
ity function. PLEASE is built to be extensible, so the
exact utility functions used may be easily changed.
In describing the group formation process, we will
use the following notation.
• A - The set of agents in the simulation
• G - The set of groups of agents in the simulation.
• S - The set of agents in a group.
• S
x
- The group of which agent x is a member.
GroupFormationandKnowledgeSharinginPedestrianEgressSimulation
359

• L
s
- The leader of S
Initially ∀x ∈ A, S
x
= {x} and L
x
= x. This states
that at the start of the simulation, each agent in the
simulation is the leader of a group consisting only of
the individual agent. The group formation process is
dividedinto four steps, do nothing, request admission,
extend invitation, accept/reject invitation. Any agent
may request admission into any nearby group. Any
agent may accept any received invitation. Only group
leaders may extend invitations to other agents. At ev-
ery time step t, ∀x ∈ A, agent x evaluates its utility
function and then either does nothing, requests ad-
mission or accepts/rejects invitations to nearby groups
based upon the expected utility. ∀S ∈ G, L
s
evaluates
its group utility function and can then choose whether
or not to extend invitations based upon the expected
utility.
3.3 Route Consensus
The PLEASE model allows groups to use three differ-
ent route consensus mechanisms, which incorporate
suggestions from group members to different degrees.
The route consensus mechanisms are least-cost route
(LC), most-common route (MC), or dictator. The dic-
tator mechanism simply chooses the decision point
proposed by the group leader. This method serves as
a benchmark to measure the effectiveness of groups.
Most other simulators do not consider route consen-
sus for groups and are thus using a dictator-like mech-
anism (Qiu and Hu, 2010; Tsai et al., 2011).
LC and MC require each pedestrian in the group
to submit a preferred decision point and an associated
route cost estimate. From the proposed routes, the LC
mechanism then selects the route with the least cost
(as identified by group members). In order for the
LC mechanism to work successfully, group members
must use the same scale to measure cost. The group
members are assumed to be reliable, that is to say,
they report their true perception of route costs and do
not lie.
The MC mechanism selects the route which was
proposed most frequently. Ties are broken by average
route cost. The MC mechanism mitigates the prob-
lems inherent in comparing costs computed by vari-
ous means as it chooses the most commonly proposed
route. The group members can have completely dif-
ferent route cost functions and a minority of group
members could be unreliable without affecting the
route selected by the group. However, this mecha-
nism is unable to take full advantage of the special
knowledge which any particular agent may have.
3.4 Information Sharing
When using the training route selection algorithm,
agents are allowed to share expected route cost in-
formation. Current simulation models assume that
pedestrian knowledge is not shared among group
members. This is a valid assumption for many sit-
uations. It represents pedestrian groups choosing an
egress route without prior discussion as to which route
is the most efficient or effective. However, pedes-
trian groups might also first discuss the benefits and
drawbacks to a particular route before deciding on an
egress route. PLEASE allows for either scenario, and
in this paper, we consider the effects of both.
In PLEASE, expected route-cost information may
either be public or private. If the information is pub-
lic, then, at the beginning of the simulation, group
members may share all the route cost information for
each decision point learned during the training runs.
Each agent has access to the models of other group
members to integrate into its own model. Currently,
all model information is treated equally so costs are
integrated as an average of the other agents’ costs. A
more complex model might allow for issues such as
trust and reliability to affect the weight that each agent
applies to other agents’ models while integrating the
costs into their own model.
Sharing information requires communication
costs. In an actual situation, sharing information may
take anywhere from a few seconds to a few minutes.
To account for this fact, PLEASE has a sharing cost
parameter which is the time, in seconds, an agent
spends sharing the route information with other group
members. Larger groups will thus require more time
to share route information than smaller groups. While
route information is being shared, no member of the
group moves towards any goal location. If group in-
formation is private, then the group members do not
share complete route-cost information. Hence there is
no associated communication cost.
As the route consensus techniques are combined
with different information sharing techniques, un-
derstanding exactly what information is shared can
be confusing. To help clarify, we state explicitly
what information is shared for the various combina-
tions. Using the LC consensus mechanism with pub-
lic knowledge results in agents sharing all their re-
spective knowledge for each decision point at the be-
ginning of the simulation. As the simulation pro-
ceeds, at every decision point, each agent will propose
their preferred next decision point and estimate of the
total route cost via that decision point. The cheapest
proposed decision point will be selected. Using the
MC consensus mechanism with public knowledge re-
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
360
sults in agents sharing all their respective knowledge
for each decision point at the beginning of the simu-
lation. As the simulation proceeds, at every decision
point, each agent will propose their preferred next de-
cision point and estimate of the total route cost via
that decision point. The most commonly proposed
decision point will be selected. Because all the in-
formation has been shared previously, the only differ-
ence between these mechanisms is in the individual
perspectives of the agents. One agent might have a
clearer view of congestion then another agent, or one
route might be closer to one agent but further away
for another agent so the best next point varies.
With the LC consensus mechanism and private
knowledge, no knowledge is shared between agents
at the beginning of the simulation. As the simula-
tion proceeds, at every decision point, each agent will
propose their preferred next decision point and esti-
mate of the total route cost via that decision point.
The cheapest proposed decision point will be se-
lected. With the MC consensus mechanism and pri-
vate knowledge, no knowledge is shared between
agents at the beginning of the simulation. As the sim-
ulation proceeds, at every decision point, each agent
will propose their preferred next decision point and
estimate of the total route cost via that decision point.
The most commonly proposed decision point will be
selected. In this case, considerable differences exist
between these mechanisms as each agent has unique
knowledge.
4 EXPERIMENTAL RESULTS
In this research, we consider the effects of static
grouping on pedestrian egress times. Various experi-
ments control the route selection algorithm used, the
route consensus mechanism, and the knowledge shar-
ing available to pedestrians. Egress times are cal-
culated with 100 agents per simulation. Tests are
repeated 20 times to put error bars into acceptable
ranges. To quantify differences between the perfor-
mances of the different mechanisms, we define effi-
ciency as the amount of time taken to evacuate a given
percentage of pedestrians. We will use this definition
of efficiency throughout our discussion of these ex-
periments.
4.1 Static Groups
In the first experiment, we compare the results of
static group formation when pedestrians use the
heuristic route selection with and without group for-
mation. The group consensus mechanism and knowl-
edge sharing mechanism have little effect on the
egress time, because in this test, none of the pedes-
trians have prior knowledge of the building and they
all use the same heuristic function. The purpose of
this experiment is to verify that pedestrian groups
have a negative impact on egress time and to quan-
tify that impact when no knowledge is shared between
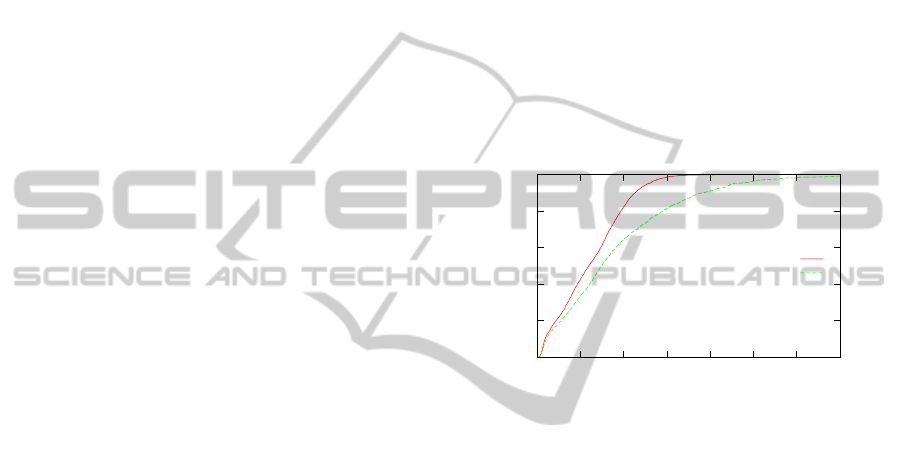
pedestrians. As can be seen in Figure 1, forming
static pedestrian groups without sharing knowledge
has a negative impact on egress times. The average
time taken to evacuate 50% of the pedestrians is 29%
greater when pedestrians form groups than when no
groups are formed. Group formation is 35% less ef-
ficient at the 70% mark and 69% less efficient at the
90% mark.
0
0.2
0.4
0.6
0.8
1
0 50 100 150 200 250 300 350
Percent Evacuated
Time (seconds)
Effect of Group Formation
No Knowledge Sharing
no groups
least-cost
Figure 1: Comparison of static group formation on egress
times when pedestrians have no prior knowledge of route
costs. Groups use the least-cost route consensus mecha-
nism.
In the second experiment, we show that group for-
mation has a negative impact on egress times when
pedestrians have individualized knowledge of the
building (acquired through training) but do not share
that knowledge. To do this we compare the egress
times using no groups versus using a dictatorship for
pedestrians, which have learned route-distances over
the period of 15 training runs. Due to space con-
straints, the results are not shown here but they are
similar to the results shown in Figure 1.
The last experiment for static groups compares the
egress times of pedestrian egress when group forma-
tion occurs and knowledge sharing is allowed. The
route consensus mechanisms are tested pair-wise with
the knowledge sharing mechanisms so we have the
following combinations: 1) No Groups, 2) Dicta-
tor, 3) Least-cost, Private information (cost-prvt), 4)
Least-cost, Public Information (cost-pblc, 5) Most-
common, Private Information (common-prvt), and 6)
Most-common, Public Information (common-pblc).
As with the previoustest, the pedestrians use the train-
ing route selection algorithm and have been trained
GroupFormationandKnowledgeSharinginPedestrianEgressSimulation
361
15 times in the building. This means that most agents
will know one or two exits and several ways to get
there. As the cost of communication is likely to vary
depending upon the circumstances, we consider two
different communication costs, free (0 seconds per
agent) and cheap (10 seconds per agent). As will
be seen from the experiments, communication costs
which are much greater than 10 seconds per agent are
no longer effective, so we do not consider them.
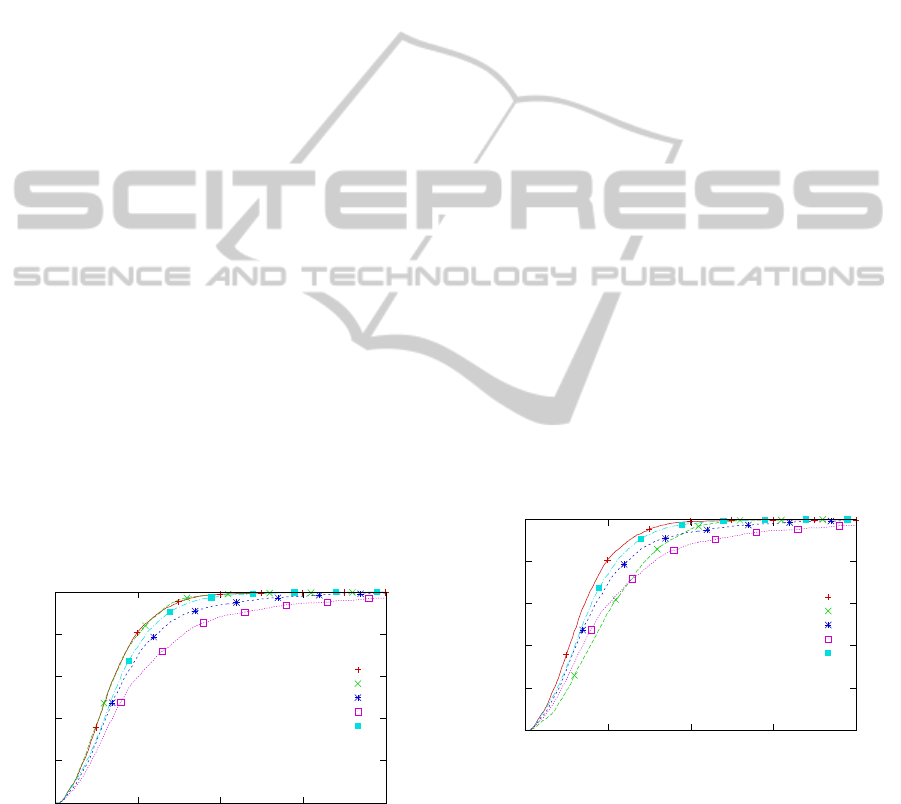
Figure 2 compares the resulting egress times when
knowledge sharing is free. When group members
have their route-cost knowledge public, group forma-
tion leads to decreased egress times compared to no
groups. Because all the route information is pub-
lic between group members, the consensus mecha-
nism has little effect on the egress time and only the
cost-pblc mechanism is shown in the results. When
group members keep their knowledge private, then
the consensus mechanism has a greater effect upon
egress times. If the group uses the least-cost consen-
sus mechanism, then the egress performance is nearly
as good as if the group had route-costs public among
them and outperforms the egress time of individuals
who do not form groups. If the group uses the most
common consensus mechanism, then egress perfor-
mance is actually worse than not forming groups, as
the common consensus mechanism is unable to cap-
italize on the information that may be had by only a
minority of the group members. These results show
that when knowledge is shared for free among group
members, group formation is transformed from hav-
ing a negative effect on egress times to having a posi-
tive effect on egress times.
0
0.2
0.4
0.6
0.8
1
0 50 100 150 200
Percent Evacuated
Time (seconds)
Effect of Group Formation
Knowledge Sharing Cost is Free
cost-prvt
cost-pblc
common-prvt
dictator
no groups
Figure 2: Static group formation and egress times using: 1)
No Groups, 2) Dictator, 3) Least-cost, Private information
(cost-prvt), 4) Least-cost, Public Information (cost-pblc),
and 5) Most-common, Private Information (common-prvt).
Sharing is free.
We also consider the case when sharing knowl-
edge is associated with a communication time penalty
of 10 seconds per group member (see Figure 3). Un-
der this assumption, having knowledge public among
group members is no longer the most efficient solu-
tion. However, it can still improve the efficiency of
egress as compared to no knowledge sharing. One
might expect that a dictatorship would be more ef-
fective than taking the time to first share knowledge
as this avoids the cost of communication. In the be-
ginning of the simulation, this is true, but as the sim-
ulation progresses, the knowledge sharing technique
begins to overtake the dictator method in terms of
percent of pedestrians evacuated. Sharing knowledge
improves the efficiency with which pedestrians exit
as compared to the dictator mechanism after the 70%
evacuated mark, and it improves efficiency for the
last 6% of pedestrians as compared to the common-
consensus mechanism without knowledge sharing.
Under the assumption of communication costs,
using the least-cost route consensus mechanism with
private knowledge (cost-prvt) is the most efficient
technique for pedestrian egress. It does not incur
the communication costs of publicly sharing all route
knowledge but is still able to benefit from the indi-
vidual knowledge of each pedestrian. In these experi-
ments, cost-prvt is even more efficient than no groups.
This is significant because it indicates that group for-
mation does not always have to have a negative effect
on egress times. If the knowledge can be used with-
out explicitly being shared, then the whole group can
benefit.
0
0.2
0.4
0.6
0.8
1
0 50 100 150 200
Percent Evacuated
Time (seconds)
Effect of Group Formation
Knowledge Sharing Cost is Size Dependent
cost-prvt
cost-pblc
common-prvt
dictator
no groups
Figure 3: Static group formation and egress times using: 1)
No Groups, 2) Dictator, 3) Least-cost, Private information
(cost-prvt), 4) Least-cost, Public Information (cost-pblc),
and 5) Most-common, Private Information (common-prvt).
Sharing costs 10 seconds per group member.
Besides the efficiencyof each mechanism, we also
consider several other statistics which indicate how
well static groups maintain a close proximity (see Ta-
ble 1). The two most relevant statistics deal with the
spatial and temporal proximity maintained by groups
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
362
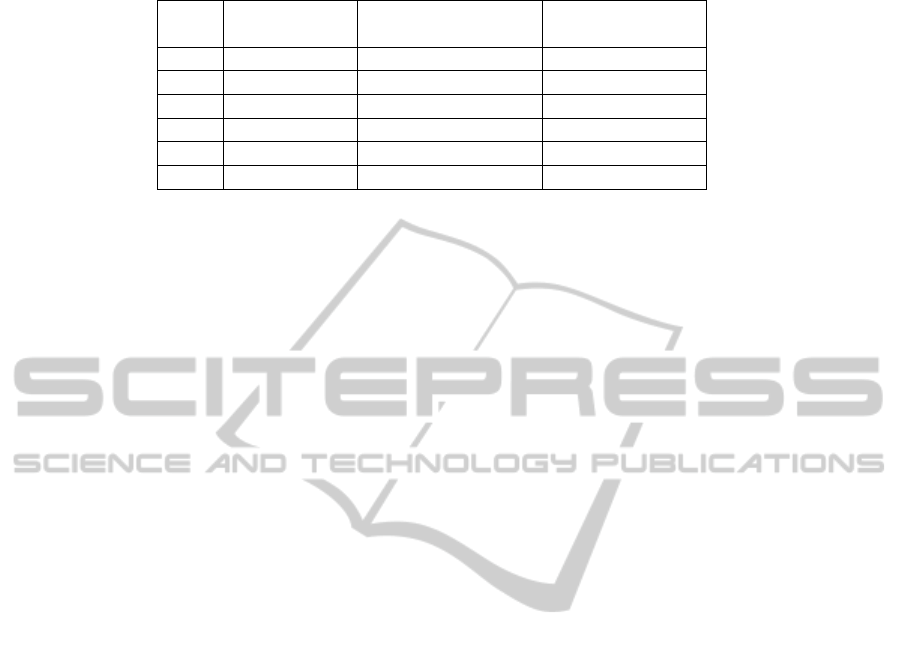
Table 1: Ranking of route consensus and knowledge sharing mechanisms by spatial proximity.
Rank Mechanism Temporal Proximity Spatial Proximity
of Finish Point of Finish Point
1 cost-pblc 7.08 s 2.33 m
2 common-pblc 7.52 s 2.74 m
3 cost-prvt 7.95 s 5.11 m
4 common-prvt 12.04 s 5.43 m
5 dicator 11.95 s 6.00 m
6 no group 26.82 s 26.63 m
while exiting the building. Spatial proximity is calcu-
lated as the average pair-wise distance between the lo-
cations at which each group member finishes. Tempo-
ral proximity is defined as the amount of time elapsed
between the successful egress of the first pedestrian of
the group and the successful egress of the last pedes-
trian of the group. These two measures reflect how
well group members maintain a close formation in
both time and space.
Table 1 shows the average spatial and temporal
proximities for each combination of mechanisms con-
sidered. Actively maintaining the group formation
leads to closer proximities than no groups. Having
knowledge information public among group members
further increases the proximities group members are
able to maintain because each member has the same
knowledge, after the initial sharing has occurred. This
helps groups maintain proximity even if they are tem-
porarily split apart. Without the shared knowledge,
group members are more likely to become lost after
being split apart from the others. This might indicate
one reason for sharing route information even with an
increased communication cost.
4.2 Dynamic Groups
We perform similar experiments with dynamic groups
to evaluate the effect of dynamic group formation on
pedestrian egress time. The results obtained during
these experiments indicate that, like static group for-
mation, dynamic group formation tends to lead to
slower egress times. The degree to which egress time
is affected is dependent upon the number and size
of the groups which form. When only a few small
groups form, egress time is not significantly affected.
However, as more groups are formed and as group
size increases, the negative impact on egress times
also increase. When the egress times for the stress
and knowledge utility functions are compared, there
did not seem to be a significant difference. The factor
with the largest impact on egress times is the number
and size of groups formed.
It is important to note here that this does not mean
it is not beneficial for an individual to join a group as
a means of compensating for a lack of knowledge or
as a means of relieving stress. Indeed, some individ-
ual agents experience improved egress times by join-
ing a group. However, the overall effect on the sys-
tem is that when too many groups form or the groups
become too large congestion ensues and egress times
slow down.
5 CONCLUSIONS AND FUTURE
WORK
Pedestrian simulation is an important area of research
with many applications. Until recently, group for-
mation in pedestrian egress has largely been ignored.
However, recent work has begun to address the issues
that arise with group formation. In this paper, we have
implemented a novel dynamic group formation tech-
nique which allows pedestrian groups to communi-
cate, share knowledge and reach a consensus regard-
ing route selection. To our knowledge, this is the first
such simulation model to address the issues of knowl-
edge sharing with time penalties and group consensus
in pedestrian egress. As future work, we suggest that
the communication costs for sharing route knowledge
be investigated further and that issues of trust and re-
liability be incorporated into the simulation model.
We have shown that, although recent literature
emphasizes the negative impacts group formation can
have upon egress times, positive incentives to group
formation exist. Our simulation model predicts that
sharing knowledge in pedestrian groups can help
pedestrian maintain closer temporal and spatial prox-
imity with greater ease as well as improve egress
times, compared to group formation without the shar-
ing of knowledge. This is true even when the in-
creased communication costs of sharing knowledge
is considered.
Dynamic group formation has impacts on egress
times similar to those found with static group forma-
tion. Pedestrians can form groups to compensate for
a lack of knowledge or as a means to reduce stress,
GroupFormationandKnowledgeSharinginPedestrianEgressSimulation
363

but both reasons have similar impacts on total egress
times. The type of consensus mechanism used, the
amount of knowledge shared, and the cost of sharing
knowledge are all shown to have a significant impact
on the overallegress times predicted by the simulation
and are therefore important factors to include when
designing a realistic pedestrian simulator.
This work is supported by NSF research grant
#0812039 entitled “Coalition Formation with Agent
Leadership.”
REFERENCES
Antonini, G., Bierlaire, M., and Weber, M. (2006). Dis-
crete choice models of pedestrian walking behav-
ior. Transportation Research Part B: Methodological,
40(8):667–687.
Bosse, T., Hoogendoorn, M., Klein, M. C. A., Treur, J.,
and Van Der Wal, C. N. (2011). Agent-based analysis
of patterns in crowd behaviour involving contagion of
mental states. In Proceedings of the 24th international
conference on Industrial engineering and other appli-
cations of applied intelligent systems conference on
Modern approaches in applied intelligence - Volume
Part II, pages 566–577, Berlin, Heidelberg. Springer-
Verlag.
Feuz, K. (2011). Pedestrian leadership and egress assistance
simulation environment. Master’s thesis, Utah State
University.
Feuz, K. and Allan, V. (2012a). Simulating knowledge
and information in pedestrain egress. In 4th Inter-
national Conference on Agents and Artificial Intelli-
gence, pages 246–253.
Feuz, K. and Allan, V. (2012b). Simulating pedestrain
route selection with imperfect knowledge. In 4th In-
ternational Conference on Agents and Artificial Intel-
ligence, pages 146–153.
Helbing, D. and Johansson, A. (2009). Pedestrian,
crowd and evacuation dynamics. In Encyclopedia of
Complexity and Systems Science, pages 6476–6495.
Springer.
Hoogendoorn, M., Treur, J., van der Wal, C., and van Wis-
sen, A. (2010). Modelling the interplay of emotions,
beliefs and intentions within collective decision mak-
ing based on insights from social neuroscience. In
Wong, K., Mendis, B., and Bouzerdoum, A., edi-
tors, Neural Information Processing. Theory and Al-
gorithms, volume 6443 of Lecture Notes in Computer
Science, pages 196–206. Springer Berlin / Heidelberg.
Hoogendoorn, S. and Bovy, P. (2004). Pedestrian route-
choice and activity scheduling theory and models.
Transportation Research Part B: Methodological,
38(2):169–190.
Kretz, T., Hengst, S., and Vortisch, P. (2008). Pedes-
trian flow at bottlenecks - validation and calibration
of vissim’s social force model of pedestrian traf-
fic and its empirical foundations. Technical Report
arXiv:0805.1788. Comments: Accepted for presenta-
tion at International Symposium of Transport Simula-
tion 2008 (ISTS08) in Gold Coast, Australia.
Kułakowski, K. and Gawro´nski, P. (2009). To cooperate or
to defect? altruism and reputation. Physica A: Statis-
tical Mechanics and its Applications, 388(17):3581–
3584.
Luber, M., Stork, J., Tipaldi, G., and Arras, K. (2010). Peo-
ple tracking with human motion predictions from so-
cial forces. In 2010 IEEE International Conference
on Robotics and Automation (ICRA), pages 464–469.
IEEE.
Moussa¨ıd, M., Perozo, N., Garnier, S., Helbing, D., and
Theraulaz, G. (2010). The walking behaviour of
pedestrian social groups and its impact on crowd dy-
namics. PLoS One, 5(4):e10047.
Murakami, Y., Minami, K., Kawasoe, T., and Ishida, T.
(2002). Multi-agent simulation for crisis management.
In 2002. Proceedings. IEEE Workshop on Knowledge
Media Networking, pages 135–139. IEEE.
Ozel, F. (2001). Time pressure and stress as a factor during
emergency egress. Safety Science, 38(2):95–107.
Pan, X. (2006). Computational Modeling of Human and
Social Behaviors for Emergency Egress Analysis. PhD
thesis, Stanford University, Stanford, California.
Qingge, J. and Can, G. (2007). Simulating crowd evacua-
tion with a leader-follower model. IJCSES, 1(4):250.
Qiu, F. (2010). A Framework for Group Modeling in Agent-
Based Pedestrian Crowd Simulations. PhD thesis,
Georgia State University, Atlanta, Georgia.
Qiu, F. and Hu, X. (2010). Modeling group structures in
pedestrian crowd simulation. Simulation Modelling
Practice and Theory, 18(2):190–205.
Russell, S. and Norvig, P. (2010). Artificial Intelligence: A
Modern Approach. Prentice Hall.
Santos, G. and Aguirre, B. E. (2004). A critical review of
emergency evacuation simulation models. In Build-
ing Occupant Movement during Fire Emergencies,
Gaithersburg, Maryland.
Shehory, O. and Kraus, S. (1998). Methods for task allo-
cation via agent coalition formation. Artificial Intelli-
gence, 101(1-2):165 – 200.
Tsai, J., Fridman, N., Bowring, E., Brown, M., Epstein, S.,
Kaminka, G., Marsella, S., Ogden, A., Rika, I., Sheel,
A., Taylor, M. E., Wang, X., Zilka, A., and Tambe,
M. (2011). Escapes: Evacuation simulation with chil-
dren, authorities, parents, emotions, and social com-
parison. In Proceedings of the International Confer-
ence on Autonomous Agents and Multiagent Systems
(AAMAS).
Yang, L., Zhao, D., Li, J., and Fang, T. (2005). Simulation
of the kin behavior in building occupant evacuation
based on cellular automaton. Building and Environ-
ment, 40(3):411–415.
Zhao, D., Yang, L., and Li, J. (2008). Occupants’ behavior
of going with the crowd based on cellular automata
occupant evacuation model. Physica A: Statistical
Mechanics and its Applications, 387(14):3708–3718.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
364
