
A Comparative Study of Different Image Features for Hand Gesture
Machine Learning
Paulo Trigueiros
1
, Fernando Ribeiro
2
and Luís Paulo Reis
3
1,2
Departamento de Electrónica Industrial da Universidade do Minho, Campus de Azurém 4800-05, Guimarães, Portugal
3
EEUM – Escola de Engenharia da Universidade do Minho – DSI, Campus de Azurém 4800-058, Guimarães, Portugal
Keywords: Hand Gesture Recognition, Machine Vision, Hand Features, Hog, Fourier Descriptors, Centroid Distance,
Radial Signature, Shi-Tomasi Corner Detection.
Abstract: Vision-based hand gesture interfaces require fast and extremely robust hand detection, and gesture
recognition. Hand gesture recognition for human computer interaction is an area of active research in
computer vision and machine learning. The primary goal of gesture recognition research is to create a
system, which can identify specific human gestures and use them to convey information or for device
control. In this paper we present a comparative study of seven different algorithms for hand feature
extraction, for static hand gesture classification, analysed with RapidMiner in order to find the best learner.
We defined our own gesture vocabulary, with 10 gestures, and we have recorded videos from 20 persons
performing the gestures for later processing. Our goal in the present study is to learn features that, isolated,
respond better in various situations in human-computer interaction. Results show that the radial signature
and the centroid distance are the features that when used separately obtain better results, being at the same
time simple in terms of computational complexity.
1 INTRODUCTION
Hand gesture recognition, being a natural way of
human computer interaction, is an area of active
current research, with many different possible
applications, in order to create simpler and more
natural forms of interaction, without using extra
devices (Hninn and Maung 2009; Trigueiros,
Ribeiro et al. 2012).
To achieve natural human-computer interaction,
the human hand could be considered as an input
device. Hand gestures are a powerful way of human
communication, with lots of potential applications,
and vision-based hand gesture recognition
techniques have many proven advantages compared
with traditional devices. Compared with traditional
HCI (Human Computer Interaction) devices, hand
gestures are less intrusive and more convenient to
explore, for example, three-dimensional (3D) virtual
worlds. However, the expressiveness of hand
gestures has not been fully explored for HCI
applications. So, hand gesture recognition has
become a challenging topic of research. However,
recognizing the shape (posture) and the movement
(gesture) of the hand in images or videos is a
complex task (Bourennane and Fossati 2010).
The approach used for the problem in vision-
based hand gesture recognition consists of
identifying the pixels on the image that constitute
the hand, extract features from those identified
pixels in order to classify the hand, and use those
features to recognize the occurrence of specific pose
or sequence of poses as gestures.
In this paper we present a comparative study of
seven different algorithms for hand feature
extraction, for static hand gesture classification. The
features were analysed with RapidMiner
(http://rapid-i.com) in order to find the best learner,
among the following four: k-NN, Naïve Bayes,
ANN and SVM. We defined our own gesture
vocabulary, with 10 gestures as shown in Figure 1,
and we have recorded videos from 20 persons
performing the gestures for later processing. Our
goal in the present study is to learn features that,
isolated, respond better in various situations in
human-computer interaction. The results show that
the radial signature and the centroid distance are the
features that when used separately obtain better
results, being at the same time simple in terms of
51
Trigueiros P., Ribeiro F. and Reis L..
A Comparative Study of Different Image Features for Hand Gesture Machine Learning.
DOI: 10.5220/0004200100510061
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 51-61
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

computational complexity. The features were
selected due to their computational simplicity and
efficiency in terms of computation time, and also
because of the good recognition rates shown in other
areas of study, like human detection (Dalal and
Triggs 2005).
The rest of the paper is as follows. First we
review related work in section 2. Section 3
introduces the actual data pre-processing stage and
feature extraction. Machine learning for the purpose
of gesture classification is introduced in section 4.
Datasets and experimental methodology are
explained in section 5. Section 6 presents and
discusses the results. Conclusions and future work
are drawn in section 7.
Figure 1: The defined gesture vocabulary.
2 RELATED WORK
Hand gesture recognition is a challenging task in
which two main approaches can be distinguished:
hand model based and appearance-based methods
(Ong and S.Ranganath 2005; Conseil, Bourenname
et al. 2007). Although appearance-based methods
are view-dependent, they are more efficient in
computation time. They aim at recognizing a gesture
among a vocabulary, with template gestures learned
from training data, whereas hand model-based
methods are used to recover the exact 3D hand pose.
Appearance-based models extract features that are
used to represent the object under study. These
methods must have, in the majority of cases,
invariance properties to translation, rotation and
scale changes. There are many studies on gesture
recognition and methodologies well presented in
(Mitra and Acharya 2007; Murthy and Jadon 2009).
Wang et al. (Wang and Wang 2008) used the
discrete Adaboost learning algorithm integrated with
SIFT features for accomplishing in-plane rotation
invariant, scale invariant and multi-view hand
detection. Conceil et al. (Conseil, Bourenname et al.
2007) compared two different shape descriptors,
Fourier descriptors and Hu moments, for the
recognition of 11 hand postures in a vision based
approach. They concluded that Fourier descriptors
gives good recognition rates in comparison with Hu
moments. Barczak et al. (Barczak, Gilman et al.
2011) performed a performance comparison of
Fourier descriptors and geometric moment invariants
on an American Sign Language database. The
results showed that both descriptors are unable to
differentiate some classes in the database.
Bourennane et al. (Bourennane and Fossati 2010)
presented a shape descriptor comparison for hand
posture recognition from video, with the objective of
finding a good compromise between accuracy of
recognition and computational load for a real-time
application. They run experiments on two families
of contour-based Fourier descriptors and two sets of
region based moments, all of them invariant to
translation, rotation and scale-changes of hands.
They performed systematic tests on the Triesch
benchmark database and on their own with more
realistic conditions, as they claim. The overall result
of the research showed that the common set Fourier
descriptors when combined with the k-nearest
neighbour classifier had the highest recognition rate,
reaching 100% in the learning set and 88% in the
test set. Huynh (Huynh 2009) presents an evaluation
of the SIFT (scale invariant feature transform),
Colour SIFT, and SURF (speeded up robust
features) descriptors on very low resolution images.
The performance of the three descriptors are
compared against each other on the precision and
recall measures using ground truth correct matching
data. His experimental results showed that both
SIFT and colour SIFT are more robust under
changes of viewing angle and viewing distance but
SURF is superior under changes of illumination and
blurring. In terms of computation time, the SURF
descriptors offer themselves as a good alternative to
SIFT and CSIFT. Fang et al. (Fang, Cheng et al.
2008) to address the problem of large number of
labelled samples, the usually costly time spent on
training, conversion or normalization of features into
a unified feature space, presented a hand posture
recognition approach with what they called a co-
training strategy (Blum and Mitchell 1998). The
main idea is to train two different classifiers with
each other and improve the performance of both
classifiers with unlabelled samples. They claim that
their method improves the recognition performance
with less labelled data in a semi-supervised way.
Rayi et al (Tara, Santosa et al. 2012) used the
centroid distance Fourier descriptors as hand shape
descriptors in sign language recognition. Their test
results showed that the Fourier descriptors and the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
52

Manhattan distance-based classifier achieved
recognition rates of 95% with small computational
latency. Classification involves a learning procedure,
for which the number of training images and the
number of gestures are important facts. Machine
learning algorithms have been applied successfully
to many fields of research like, face recognition
(Faria, Lau et al. 2009), automatic recognition of a
musical gesture by a computer (Gillian 2011),
classification of robotic soccer formations (Faria,
Reis et al. 2010), classifying human physical activity
from on-body accelerometers (Mannini and Sabatini
2010), automatic road-sign detection (Vicen-Bueno,
Gil-Pita et al. 2004; Maldonado-Báscon, Lafuente-
Arroyo et al. 2007), and static hand gesture
classification (Trigueiros, Ribeiro et al. 2012). K-
Nearest Neighbour was used in (Faria, Lau et al.
2009; Faria, Reis et al. 2010). This classifier
represents each example as a data in d–dimensional
space, where d is the number of attributes. Given a
test sample, the proximity to the rest of the data
points in the training set is computed using a
measure of similarity or dissimilarity. In the distance
calculation, the standard Euclidean distance is
normally used, however other metrics can be used
(Witten, Frank et al. 2011). An artificial neural
network is a mathematical / computational model
that attempts to simulate the structure of biological
neural systems. They accept features as inputs and
produce decisions as outputs (Snyder and Qi 2004).
Maung et al (Vicen-Bueno, Gil-Pita et al. 2004;
Hninn and Maung 2009; Faria, Reis et al. 2010;
Stephan and Khudayer 2010) used it in a gesture
recognition system, Faria et al (Faria, Reis et al.
2010) used it for the classification of robotic soccer
formations, Vicen-Buéno (Vicen-Bueno, Gil-Pita et
al. 2004) used it applied to the problem of traffic
sign recognition and Stephan et al used it for static
hand gesture recognition for human-computer
interaction. Support Vector Machines (SVM’s) is a
technique based on statistical learning theory, which
works very well with high-dimensional data. The
objective of this algorithm is to find the optimal
separating hyper plane between two classes by
maximizing the margin between them (Ben-Hur and
Weston 2008). Faria et al. (Faria, Lau et al. 2009;
Faria, Reis et al. 2010) used it to classify robotic
soccer formations and the classification of facial
expressions, Ke et al. (Ke, Li et al. 2010) used it in
the implementation of a real-time hand gesture
recognition system for human robot interaction,
Maldonado-Báscon (Maldonado-Báscon, Lafuente-
Arroyo et al. 2007) used it for the recognition of
road-signs and Masaki et al used it in conjunction
with SOM (Self-Organizing Map) for the automatic
learning of a gesture recognition mode. Trigueiros et
al. (Trigueiros, Ribeiro et al. 2012) have made a
comparative study of four machine learning
algorithms applied to two hand features datasets. In
their study the datasets had a mixture of hand
features. In this paper all the features extracted are
analysed individually with machine learning
algorithms to understand their performance and
robustness in terms of scale, translation and rotation
invariant static hand gesture recognition.
3 PRE-PROCESSING AND
FEATURE EXTRACTION
Hand segmentation and feature extraction is a
crucial step in computer vision applications for hand
gesture recognition. The pre-processing stage
prepares the input image and extracts features used
later with the classification algorithms.
In the present study, we used seven data sets
with different features extracted from the segmented
hand. The hand features used for the training
datasets are: the radial signature, the radial signature
Fourier descriptors, the centroid distance, the
centroid distance Fourier descriptors, the histogram
of gradients (HoG), the Shi-Tomasi corner detector
and the uniform local binary patterns.
For the problem at hand, two types of images
obtained with a Kinect camera were used in the
feature extraction phase. The first one, the hand grey
scale image was used in the HoG operator, the LBP
(local binary pattern) operator and the Shi-Tomasi
corner detector. The second one, the segmented hand
blob, was used in the radial signature and the
centroid distance signature after contour extraction.
3.1 Radial Signature
Shape signature is used to represent the shape
contour of an object. The shape signature itself is a
one-dimensional function that is constructed from
the contour coordinates. The radial signature is one
of several types of shape signatures.
A simple method to assess the gesture would be to
measure the number of pixels from the hand centroid
to the edges of the hand along a number of equally
spaced radials (Lockton 2002). For the present
feature extraction problem, 100 equally spaced
radials were used. To count the number of pixels
along a given radial we only take into account the
ones that are part of the hand, eliminating those that
AComparativeStudyofDifferentImageFeaturesforHandGestureMachineLearning
53
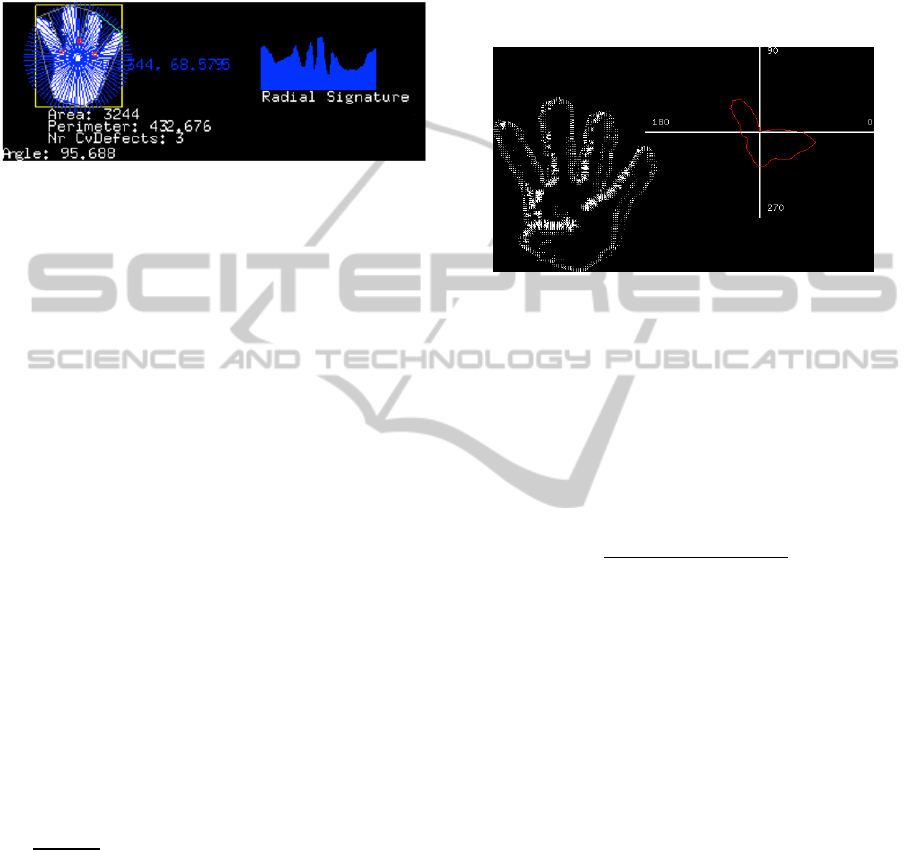
fall inside gaps, like the ones that appear between
fingers or between the palm and a finger (Figure 2).
All the radial measurements can be scaled so that the
longest radial has a constant length. With this
measure, we can have a radial length signature that
is invariant to hand distance from the camera.
Figure 2: Hand radial signature. Hand with drawn radials
(left); obtained radial signature (right).
3.2 Histogram of Gradients (HoG)
Pixel intensities can be sensitive to lighting
variations, which lead to classification problems
within the same gesture under different light
conditions. The use of local orientation measures
avoids this kind of problem, and the histogram gives
us translation invariance. Orientation histograms
summarize how much of each shape is oriented in
each possible direction, independent of the position
of the hand inside the camera frame (Roth, Tanaka
et al. 1998). This statistical technique is most
appropriate for close-ups of the hand. In our work,
the hand is extracted and separated from the
background, which provides a uniform black
background, which makes this statistical technique a
good method for the identification of different static
hand poses, as it can be seen in Figure 3.
This method is insensitive to small changes in
the size of the hand, but it is sensitive to changes in
hand orientation.
We have calculated the local orientation using
image gradients, represented by horizontal and
vertical image pixel differences. If d
and d
are the
outputs of the derivative operators, then the gradient
direction is arctand
,d
, and the contrast
is
. A contrast threshold is set as some
amount k times the mean image contrast, below
which we assume the orientation measurement is
inaccurate. A value of k=1.2 was used in the
experiments. We then blur the histogram in the
angular domain as in (Freeman and Roth 1994), with
a [1 4 6 4 1] filter, which gives a gradual fall-off in
the distance between orientation histograms.
This feature descriptor was extensively used in many
other areas like human detection (Dalal and Triggs
2005; Dalal, Triggs et al. 2006), in conjunction with
other operators like the Scale Invariant Feature
Transformation (SIFT) (Lowe 2004), the Kanade-
Lucas-Tomasi (KLT) feature tracker (Kaaniche and
Bremond 2009) and local binary patterns for static
hand-gesture recognition (Ding, Pang et al. 2011).
Lu et al. (Lu and Little 2006) and Kaniche et al.
(Kaaniche and Bremond 2009) used temporal HOGs
for action categorization and gesture recognition.
Figure 3: Hand gradients (left), Histogram of gradients
(right).
3.3 Centroid Distance Signature
The centroid distance signature is another type of
shape signature. The centroid distance function is
expressed by the distance of the hand contour
boundary points, from the centroid
,
of the
shape. In our study we used N = 128 as the number
of equally sampled points on the contour.
d
i
x
x
y
y
,
i0,….,N1
(1)
where
, is the calculated distance, and
and
are the coordinates of contour points. This way, we
obtain a one-dimensional function that represents the
hand shape.
Due to the subtraction of centroid, which
represents the hand position, from boundary
coordinates, the centroid distance representation is
invariant to translation. Rayi Yanu Tara et al. (Tara,
Santosa et al. 2012) demonstrated that this function
is translation invariant and that a rotation of that
hand results in a circularly shift version of the
original image.
3.4 Local Binary Patterns
LBP (local binary pattern) is a grey scale invariant
local texture operator with powerful discrimination
and low computational complexity (Ojala,
PeitiKainen et al. 2002; Unay, Ekin et al. 2007;
Hruz, Trojanova et al. 2011; PietiKainen, Hadid et
al. 2011). This operator labels the pixels of the
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
54
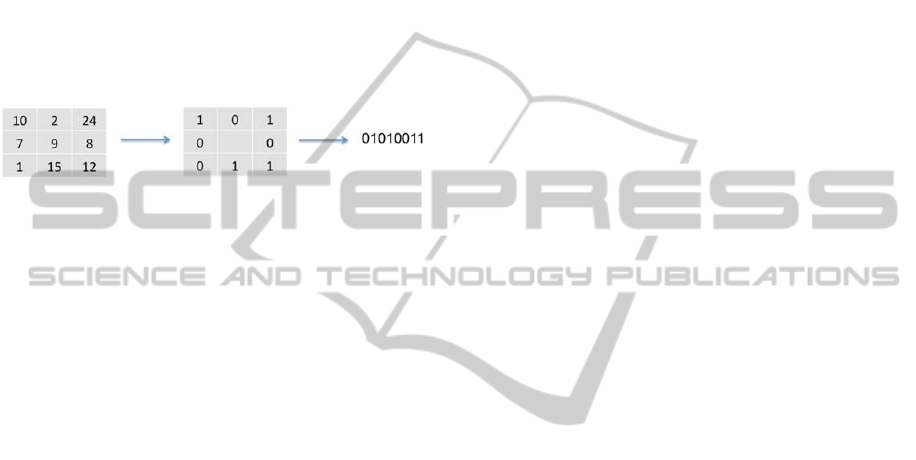
image by thresholding the neighbourhood of each
pixel g
p0…P1
, being P the values of
equally spaced pixels on a circle of radius R (R > 0),
by the grey value of its center (g
) and considers the
result as a binary code that describes the local
texture (Ojala, PeitiKainen et al. 2002; Unay, Ekin et
al. 2007; PietiKainen, Hadid et al. 2011). The code
is derived as follows:
LBP
,
sg
g
2
(2)
where
s
x
1, x0
0, x0
(3)
Figure 4: Example of computing
,
: example of
pixel neighbourhood (left); threshold version (middle);
resulting binary code (right).
Figure 4 illustrates the computation of LBP
,
for
a single pixel in a rectangular 3x3 neighbourhood.
g
is always assigned to be the gray value of
neighbor to the right of g
. In the general definition,
LBP is defined in a circular symmetric
neighbourhood, which requires interpolation of the
intensity values for exact computation. The
coordinates of g
are given by
Rsin
2πp/
P
,Rcos
2πp/P
(Ojala, PeitiKainen et al. 2002).
The LBP
,
operator produces 2
different output
values, corresponding to the 2
different binary
patterns that can be formed by the P pixels in the
neighborhood set.
As a rotation of a textured input image causes the
LBP patterns to translate into a different location
and to rotate about their origin, if rotation invariance
is needed, it can be achieved by rotation invariance
mapping. In this mapping, each LBP binary code is
circularly rotated into its minimum value
LBP
,
min
RORLBP
,
,i
(4)
where
ROR
x,i
denotes the circular bitwise right
shift on the P-bit number x, i steps. For example, 8-
bit LBP codes 00111100b, 11110000b, and
00001111b all map to the minimum code
00001111b. For P=8 a total of 36 unique different
values is achieved. This operator was designated as
LBPROT in (Pietikainen, Ojala et al. 2000).
Ojala et.al (Ojala, PeitiKainen et al. 2002) had
shown however, that LBPROT as such does not
provide very good discrimination. They have
observed that certain local binary patterns are
fundamental properties of texture, providing the vast
majority of all 3x3 patterns presented in observed
textures. They called this fundamental patterns
“uniform” as they have one thing in common –
uniform circular structure that contains very few
spatial transitions. They introduced a uniformity
measure U(pattern), which corresponds to the
number of spatial transitions (bitwise 0/1 changes) in
the “pattern”. Patterns that have a U value of at most
2 are designated uniform and the following operator
for grey-scale and rotation invariant texture
description was proposed:
LBP
,
sg
g
,
i
f
ULBP
,
2
P1, otherwise
(5)
Equation (5) assigns a unique label
corresponding to the number of “1” bits in the
uniform pattern, while the non-uniform are grouped
under the “miscellaneous” label (P+1). In practice
the mapping from LBP
,
to LBP
,
is best
implemented with a lookup table of 2
elements.
The final texture feature employed in texture
analysis is the histogram of the operator output (i.e.,
pattern labels).
In the present work, we used the histogram of
the uniform local binary pattern operator, with R
radiusequalto1andPnumberofpixelsinthe
neighbourhoodequalto8,asafeaturevectorfor
thehandposeclassification.
3.5 Fourier Descriptors
Instead of using the original image representation in
the spatial domain, feature values can also be
derived after applying a Fourier transformation. The
feature vector calculated from a data representation
in the transform domain, is called Fourier descriptor
(Treiber 2010). The Fourier descriptor is another
feature describing the boundary of a region (Snyder
and Qi 2004) (Zhang and Lu 2002), and is
considered to be more robust with respect to noise
and minor boundary modifications. In the present
study Fourier descriptors were obtained for the
histograms calculated from the radial signature and
the centroid distance. For computational efficiency
of the FFT, the number of points is chosen to be a
power of two (Conseil, Bourenname et al. 2007).
The normalized length is generally chosen to be
equal to the calculated histogram signature length
(N). Hence the Fourier Transform leads to N Fourier
coefficients C
:
AComparativeStudyofDifferentImageFeaturesforHandGestureMachineLearning
55

C
z
exp
2πjik
N
,
k
0,…,N1
6
Table 1showstherelationbetweenmotionsin
theimageandtransformdomains,whichcanbe
usedinsometypesofinvariance.
Table 1: Equivalence between motions in the image and
transform domains.
In the ima
g
e In the transform
A change in size Multiplication by a constant
A rotation of Ø about
the origin
Phase shift
A translation A change in the DC term
The first coefficient C
is discarded since it only
contains the hand position. Hand rotation affects
only the phase information, thus if rotation
invariance is necessary, it can be achieved by taking
the magnitude of the coefficients. Division of the
coefficients by the magnitude of the second
coefficient, C
, on the other hand, achieves scale
invariance. This way we obtain N-1 Fourier
descriptorsI
:
I
|
C
|
|
C
|
,k2,…,N1
(7)
Conceil et.al (Conseil, Bourenname et al. 2007),
showed that with 20 coefficients the hand shape is
well reconstructed, so we used this in our
experiments. Centroid distance Fourier descriptors,
obtained by applying Fourier transform on a centroid
distance signature, were empirically proven to have
higher performance than other Fourier descriptors
(Zhang and Lu 2002; Shih 2008).
3.6 The Shi-Tomasi Corner Detector
The Shi-Tomasi corner detector algorithm (Shi and
Tomasi 1994) is an improved version of the Harris
corner detector (Harris and Stephens 1988). The
improvement is in how a certain region within the
image is scored (and thus treated as a corner or not).
Where the Harris corner detector determines the
score with the eigenvalues
and
of two
regions (the second region is a shifted version of the
first one to see if the difference between the two is
big enough to say if there is a corner or not) in the
following way:
Rdet
λ
λ
k
λ
λ
(8)
Shi and Tomasi just use the minimum of both
eigenvalues
min
,
(9)
and if R is greater than a certain predefined value, it
can be marked as a corner. They demonstrated
experimentally in their paper, that this score criteria
is much better.
4 MACHINE LEARNING
The study and computer modelling of learning
processes in their multiple manifestations constitutes
the topic of machine learning (Camastra and
Vinciarelli 2008). Machine learning is the task of
programming computers to optimize a performance
criterion using example data or past experience
(Alpaydin 2004). For that, machine learning uses
statistic theory in building mathematical models,
because the core task is to make inference from
sample data.
In machine learning two entities, the teacher and
the learner, play a crucial role. The teacher is the
entity that has the required knowledge to perform a
given task. The learner is the entity that has to learn
the knowledge to perform the task. We can
distinguish learning strategies by the amount of
inference the learner performs on the information
provided by the teacher. The learning problem can
be stated as follows: given an example set of limited
size, find a concise data description (Camastra and
Vinciarelli 2008).
In our study, supervised learning was used,
where the classification classes are known in
advance. In supervised learning, given a sample of
input-output pairs, called the training sample, the
task is to find a deterministic function or model that
maps any input to an output that can predict future
observations, minimizing the error as much as
possible.
The model was learned from the extracted hand
features with the help of the RapidMiner tool. The
best learners identified for the produced datasets
were the k-NN (k-nearest neighbour), the ANN
(artificial neural network) and the SVM (support
vector machines).
5 DATASETS & EXPERIMENTAL
METHODOLOGY
For data analysis, feature selection, data set
preparation and data transformation is an important
phase. To construct the right model it is necessary to
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
56
understand the data. Successful data mining involves
far more than selecting a learning algorithm and
running it over your data (Witten, Frank et al. 2011).
In order to process the recorded videos, a C++
application, using openFrameworks and the
respective OpenCV (opencv.org) and OpenNI
(openni.org) libraries, was developed. The
application runs through all the files, and extracts for
each algorithm the respective features. Those
features are recorded in text datasets, and converted
later to an .xls file to be imported with the Rapid
Miner application for data analysis and to find the
best learner for each dataset. The experimental
results were achieved in an Intel Core i7 (2,8 GHz)
Mac OSX computer with 4GB DDR3. All the
datasets where analysed with RapidMiner, in order
to find the best learner. The experiments were
performed under the assumption of the k-fold
method. The k-fold cross validation is used to
determine how accurately a learning algorithm will
be able to predict data that it was not trained with
(Camastra and Vinciarelli 2008; Faria, Lau et al.
2009). A value of k=10 (10-fold cross validation)
was used, giving a good rule of approximation,
although the best value depends on the used
algorithm and the dataset (Alpaydin 2004; Witten,
Frank et al. 2011).
The algorithms performance, based on the counts
of test records correctly and incorrectly predicted by
the model, was analysed.
Table 2 summarizes the
best learners for each dataset with the corresponding
parameters.
6 RESULTS AND DISCUSSION
After analysing the different datasets, the obtained
results were in most of the cases encouraging,
although in othercases weaker than one could
expect. In order to analyse how classification errors
are distributed among classes, a confusion matrix
was computed for each learner with the help of
RapidMiner.
Following we present the different results
obtained with each dataset, in terms of best learner,
the respective confusion matrix and the average
accuracy recognition rate.
For the radial signature dataset, the best learner
was the neural network with an accuracy of 91,0%.
Table 3 shows the obtained confusion matrix. For the
centroid distance dataset, the best learner was the
neural network, with an accuracy of 90,1%.
Table 4
shows the obtained confusion matrix. For the radial
signature Fourier descriptors the best learner was the
k-NN (nearest neighbour) with a value of k=1 and an
accuracy of 82,28%.
Table 5 shows the obtained
confusion matrix. For the centroid distance Fourier
descriptors the best learner was the k-NN (nearest
neighbour) with a value of k=1 and an accuracy of
79,53%.
Table 6 shows the obtained confusion
matrix. For the local binary pattern operator, the best
learner was the SVM (support vector machine) with
a RBF (radial basis function) kernel type, C = 6 and
a bias (offset) of 0.032. The achieved accuracy was
89,3%. The SVM library used was the libSVM
(www.csie.ntu.edu.tw/~cjlin/libsvm) (Chang and Lin
2011), since it supports multi-class classification.
Table 7 shows the obtained confusion matrix. For the
histogram of gradients the best learner was the SVM
(support vector machines) with and RBF (radial
basis function) kernel type, C = 2 and a bias (offset)
of 0.149. The achieved accuracy was of 61,46%.
The SVM library used was the libSVM. A lot of
misclassification occurred in the data.
Table 8 shows
the obtained confusion matrix. For the Shi-Tomasi
corner detector the best learner was the neural
network with a learning rate of 0.1. The obtained
results were very weak has can be seen in
Table 9.
Table 2: ML algorithms identified as best learners for each dataset and used parameters.
Dataset Best learn. Algor. Parameters Accuracy
Radial Signature Neural Net
91,0%
Centroid Distance Neural Net
90,1%
Radial Sign. Fourier Descriptors k-NN k=1
82,3%
Centroid dist. Fourier Descriptors k-NN k=1
79.5%
Uniform Local Binary Patterns SVM (libSVM) Kernel = RBF ; C=6; Bias = 0.032
89,3%
Histogram of Gradients SVM (libSVM) Kernel = RBF ; C=2; Bias = 0.149
61,46%
Shi-Tomasi corners Neural Net Learning rate = 0.1
21,90%
AComparativeStudyofDifferentImageFeaturesforHandGestureMachineLearning
57
Table 3: Radial signature dataset confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
234 1 2 2 3 4 2 6 4 6
2
2 290 8 2 2 3 1 3 0 6
3
2 1 273 2 4 5 5 2 2 8
4
1 1 4 252 6 3 2 4 1 0
5
5 1 4 2 291 7 1 5 0 0
6
2 1 2 5 1 281 8 6 2 0
7
2 1 2 4 1 3 290 3 0 6
8
2 3 5 3 2 4 0 250 1 5
9
7 3 9 0 2 3 2 1 276 4
10
0 8 3 4 4 2 2 2 1 258
Table 4: Centroid distance dataset confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
343 7 2 2 5 1 2 2 6 12
2
9 335 4 4 8 4 12 3 1 1
3
1 2 314 5 43 0 1 3 0 5
4
1 0 2 287 7 3 1 12 1 8
5
2 1 1 2 309 3 8 7 0 9
6
2 1 0 7 4 345 3 5 9 4
7
5 4 4 4 0 4 321 1 2 2
8
3 3 9 3 5 2 1 299 3 3
9
2 4 6 0 7 3 3 5 308 1
10
2 4 3 8 11 5 5 9 1 271
Table 5: Radial signature Fourier confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
250 1 4 2 9 12 3 3 2 2
2
2 275 10 6 8 3 17 8 1 17
3
3 5 249 9 7 5 6 17 0 16
4
7 12 11 248 8 6 7 10 1 0
5
6 2 4 20 241 16 10 14 2 8
6
12 3 3 2 21 245 9 4 2 2
7
3 8 3 5 4 7 228 2 0 10
8
3 2 13 6 7 9 12 220 1 9
9
9 1 1 0 2 4 0 6 287 1
10
1 3 6 0 2 1 6 5 1 232
Table 6: Centroid distance Fourier confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
261 17 4 3 13 9 8 5 12 5
2
8 258 7 8 9 4 8 10 5 6
3
9 12 295 11 8 2 6 5 6 7
4
6 6 8 234 7 11 6 7 7 11
5
2 3 5 6 273 3 12 4 17 17
6
2 5 4 6 8 290 15 1 6 17
7
1 6 6 8 3 10 284 12 9 11
8
9 11 6 5 6 4 3 260 4 14
9
9 6 7 11 5 7 6 6 242 8
10
2 6 7 4 7 15 10 15 8 237
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
58

Table 7: Local binary patterns dataset confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
460 7 4 4 2 2 6 5 10 15
2
12 499 7 7 8 9 7 3 11 7
3
2 4 457 24 11 1 2 1 5 9
4
9 9 12 486 30 6 0 0 8 17
5
3 15 18 35 522 8 3 0 5 17
6
10 14 2 4 11 531 4 2 7 15
7
3 2 1 0 0 1 517 1 2 4
8
10 1 1 0 0 5 3 554 1 0
9
5 7 7 8 1 9 4 0 525 4
10
15 5 31 13 9 4 2 0 1 457
Table 8: Histogram of gradients dataset confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
174 15 14 11 5 0 1 17 19 17
2
24 207 8 11 10 13 8 9 25 12
3
18 10 199 25 12 4 2 6 20 13
4
7 5 22 168 24 15 3 4 10 24
5
8 7 11 18 181 19 15 4 6 19
6
0 7 2 9 24 195 19 5 7 15
7
16 39 16 21 34 62 259 39 20 38
8
10 4 3 5 6 2 1 189 5 3
9
30 19 17 9 8 3 1 12 176 14
10
10 15 16 23 13 11 11 3 19 161
Table 9: Shi-Tomasi corner detector confusion matrix.
Actual class
1 2 3 4 5 6 7 8 9 10
Predicted class
1
45 26 36 22 23 19 15 17 30 25
2
22 77 34 16 10 18 16 5 15 59
3
46 40 49 52 49 40 27 33 25 42
4
28 30 41 43 48 35 27 23 22 27
5
23 16 36 36 30 42 22 23 14 11
6
29 21 39 42 46 56 53 26 29 27
7
16 23 15 30 34 35 75 16 31 28
8
27 5 37 23 32 37 16 139 14 9
9
27 22 12 13 20 26 38 7 104 24
10
24 58 21 26 23 17 27 7 30 63
7 CONCLUSIONS AND FUTURE
WORK
This paper presented a comparative study of seven
different algorithms for hand feature extraction,
aimed at static hand gesture classification and
recognition, for human computer interaction.
We defined our own gesture vocabulary, with 10
gestures (Figure 1), and we have recorded videos
from 20 persons performing the gestures for hand
feature extraction. The study main goal was to test
the robustness of all the algorithms, applied
individually to scale, translation and rotation
invariance. After analysing the data and the obtained
results we conclude that further pre-processing on
the video frames is necessary in order to minimize
the number of different feature values obtained for
the same hand posture. The depth video images
obtained with the Kinect have low resolution and
some noise, so it was concluded that some
imprecision on data recordings results from those
problems, leading to more difficult class learning.
There are several interpretations of noise as
explained in (Alpaydin 2004). Due to this situation,
it was decided that a temporal filtering and/or a
spatial filtering should be used and will be tested and
analysed to see if better results are achieved.
It has been found that the radial signature and the
centroid distance are the best shape descriptors
discussed in this paper in terms of robustness and
AComparativeStudyofDifferentImageFeaturesforHandGestureMachineLearning
59

computation complexity. Sometimes we have to
apply the principle known as Occam’s razor, which
states that “simpler explanations are more plausible
and any unnecessary complexity should be shaved
off”.
The Shi-Tomasi corner detector implemented in
OpenCV was the one that achieved the weaker
results, and we will possibly try it only on future
studies with dynamic gestures. Better results were
expected from the Fourier descriptors, after having
analysed related work on the area, sowe will
evaluate them further after having implemented the
video streaming temporal filtering. In the local
binary pattern operator, different radius and number
of neighbours will be tested to analyse if better
results are obtained.
Also, datasets with a combination of studied
features will be constructed and evaluated for the
problem at hand.
REFERENCES
Alpaydin, E. (2004). Introduction to Machine Learning,
MIT Press.
Barczak, A. L. C., A. Gilman, et al. (2011). Analysis of
Feature Invariance and Discrimination for Hand
Images: Fourier Descriptors versus Moment
Invariants. International Conference Image and Vision
Computing. New Zeland.
Ben-Hur, A. and J. Weston (2008). A User’s Guide to
Support Vector Machines. Data Mining Techniques
for the Life Sciences, Humana Press. 609: 223-239.
Blum, A. and T. Mitchell (1998). Combining labeled and
unlabeled data with co-training. Proceedings of the
eleventh annual conference on Computational learning
theory. Madison, Wisconsin, United States, ACM: 92-
100.
Bourennane, S. and C. Fossati (2010). "Comparison of
shape descriptors for hand posture recognition in
video." Signal, Image and Video Processing 6(1): 147-
157.
Camastra, F. and A. Vinciarelli (2008). Machine Learning
for Audio, Image and Video Analysis, Springer.
Chang, C.-C. and C.-J. Lin (2011). "LIBSVM: A library
for support vector machines." ACM Transactions on
Intelligent Systems and Technology 2(3): 27.
Conseil, S., S. Bourenname, et al. (2007). Comparison of
Fourier Descriptors and Hu Moments for Hand
Posture Recognition. 15th European Signal Processing
Conference (EUSIPCO). Poznan, Poland: 1960-1964.
Dalal, N. and B. Triggs (2005). Histograms of Oriented
Gradients for Human Detection. International
Conference on Computer Vision & Pattern
Recognition, Grenoble, France.
Dalal, N., B. Triggs, et al. (2006). Human detection using
oriented histograms of flow and appearance. 9th
European conference on Computer Vision. Graz,
Austria, Springer-Verlag 428–441.
Ding, Y., H. Pang, et al. (2011). "Static Hand-Gesture
Recognition using HOG and Improved LBP features."
International Journal of Digital Content Technology
and its Applications 5(11): 236-243.
Fang, Y., J. Cheng, et al. (2008). Hand posture recognition
with co-training. 19th International Conference on
Pattern Recognition (ICPR 2008). , Tampa, FL.
Faria, B. M., N. Lau, et al. (2009). Classification of Facial
Expressions Using Data Mining and machine Learning
Algorithms. 4ª Conferência Ibérica de Sistemas e
Tecnologias de Informação, Póvoa de Varim,
Portugal.
Faria, B. M., L. P. Reis, et al. (2010). Machine Learning
Algorithms applied to the Classification of Robotic
Soccer Formations ans Opponent Teams. IEEE
Conference on Cybernetics and Intelligent Systems
(CIS). Singapore: 344 - 349
Freeman, W. T. and M. Roth (1994). Orientation
Histograms for Hand Gesture Recognition, Mitsubishi
Electric Research Laboratories, Cambridge Research
Center.
Gillian, N. E. (2011). Gesture Recognition for Musician
Computer Interaction. Doctor of Philosophy, Faculty
of Arts, Humanities and Social Sciences.
Harris, C. and M. Stephens (1988). A combined corner
and edge detector. The Fourth Alvey Vision
Conference.
Hninn, T. and H. Maung (2009). "Real-Time Hand
Tracking and Gesture Recognition System Using
Neural Networks." 50(Frebuary): 466-470.
Hruz, M., J. Trojanova, et al. (2011). "Local binary pattern
based features for sign language recognition." Pattern
Recognition and Image Analysis 21(3): 398-401.
Huynh, D. Q. (2009). Evaluation of Three Local
Descriptors on Low Resolution Images for Robot
Navigation. Image and Vision Computing (IVCNZ
'09). Wellington: 113 - 118
Kaaniche, M.-B. and F. Bremond (2009). Tracking HOG
Descriptors for Gesture Recognition. IEEE Int. Conf.
on Advanced Video and Signal based Surveillance,
IEEE Computer Society Press.
Ke, W., W. Li, et al. (2010). "Real-Time Hand Gesture
Recognition for Service Robot." 976-979.
Lockton, R. (2002). Hand Gesture Recognition Using
Computer Vision, Oxford University.
Lowe, D. G. (2004). "Distinctive image features from
scale-invariant keypoints." International Journal of
Computer Vision 60(2): 91-110.
Lu, W.-L. and J. J. Little (2006). Simultaneous Tracking
and Action Recognition using the PCA-HOG
Descriptor. Proceedings of the The 3rd Canadian
Conference on Computer and Robot Vision, IEEE
Computer Society: 6.
Maldonado-Báscon, S., S. Lafuente-Arroyo, et al. (2007).
Road-Sign detection and Recognition Based on
Support Vector Machines. IEEE Transactions on
Intelligent Transportation Systems. 8: 264-278.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
60

Mannini, A. and A. M. Sabatini (2010). "Machine learning
methods for classifying human physical activity from
on-body accelerometers." Sensors 10(2): 1154-1175.
Mitra, S. and T. Acharya (2007). Gesture recognition: A
Survey. IEEE Transactions on Systems, Man and
Cybernetics, IEEE. 37: 311-324.
Murthy, G. R. S. and R. S. Jadon (2009). "A Review of
Vision Based Hand Gestures Recognition."
International Journal of Information Technology and
Knowledge Management 2(2): 405-410.
Ojala, T., M. PeitiKainen, et al. (2002). "Multiresolution
gray-scale and rotation invariant texture classification
with local binary patterns." IEEE Trans. Pattern
Analysis ans Machine Intelligence 24(7): 971-987.
Ong, S. and S.Ranganath (2005). "Automatic sign
language analysis: A survey and the future beyond
lexical meaning." IEEE Trans. Pattern Analysis ans
Machine Intelligence 27(6): 873-891.
PietiKainen, M., A. Hadid, et al. (2011). Computer Vision
Using Local Binary Patterns. London, Springer-
Verlag.
Pietikainen, M., T. Ojala, et al. (2000). "Rotation-Invariant
Texture Classification using Feature Distributions."
Pattern Recognition 33: 43-52.
Roth, M., K. Tanaka, et al. (1998). Computer Vision for
Interactive Computer Graphics. IEEE Computer
Graphics And Applications, Mitsubishi Electric
Research Laboratory: 42-53.
Shi, J. and C. Tomasi (1994). Good Features to Track.
Internacional Conference on Computer Vision and
Pattern Recognition. Seattle, WA, USA, Springer:
593-600.
Shih, F. Y. (2008). Image Processing and Pattern
Recognition: Fundamentals and Techniques. Canada,
Wiley and Sons.
Snyder, W. E. and H. Qi (2004). Machine Vision,
Cambridge University Press.
Stephan, J. J. and S. Khudayer (2010). "Gesture
Recognition for Human-Computer Interaction (HCI)."
International Journal of Advancements in Computing
Technology 2(4): 30-35.
Tara, R. Y., P. I. Santosa, et al. (2012). "Sign Language
Recognition in Robot Teleoperation using Centroid
Distance Fourier Descriptors." International Journal of
Computer Applications 48(2).
Treiber, M. (2010). An Introduction to Object
Recognition, Springer.
Trigueiros, P., F. Ribeiro, et al. (2012). A comparison of
machine learning algorithms applied to hand gesture
recognition. 7ª Conferência Ibérica de Sistemas e
Tecnologias de Informação, Madrid, Spain.
Unay, D., A. Ekin, et al. (2007). Robustness of Local
Binary Patterns in Brain MR Image Analysis. 29th
Annual Conference of the IEEE EMBS, Lyon, France,
IEEE.
Vicen-Bueno, R., R. Gil-Pita, et al. (2004). Complexity
Reduction in Neural Networks Appplied to Traffic
Sign Recognition Tasks.
Wang, C.-C. and K.-C. Wang (2008). Hand Posture
Recognition Using Adaboost with SIFT for Human
Robot Interaction. Proceedings of the International
Conference on Advanced Robotics (ICAR'07), Jeju,
Korea.
Witten, I. H., E. Frank, et al. (2011). Data Mining -
Pratical Machine Learning Tools and Techniques,
Elsevier.
Zhang, D. and G. Lu (2002). A comparative Study of
Fourier Descriptors for Shape Representation and
Retrieval. Proc. of 5th Asian Conference on Computer
Vision (ACCV), Melbourne, Australia, Springer.
AComparativeStudyofDifferentImageFeaturesforHandGestureMachineLearning
61
